激光點云在園林城市綠地建庫中的應用研究
2022-03-06 01:07:08吳國華
城市勘測 2022年1期
吳國華
(福州市勘測院,福建 福州 350108)
1 引 言
福州市具有十分豐富的地理自然資源和歷史人文資源,早在2003年就被評為國家園林城市。隨著福州市城市建成區的不斷擴展以及城區綠化改造提升、河岸串珠公園等園林綠化項目的建設,于2016年提出創建國家“生態園林城市”的目標。申報國家生態園林城市需依據《國家生態園林城市標準》中各項指標標準,并及時掌握福州市園林綠化現狀及歷年指標變化情況,以及時進行調整優化[1]。為能及時實現福州市城市園林綠地數據采集與更新,福州市園林中心啟動建設福州規劃區城市綠地數據庫,并設立快速提取建庫及年度更新的目標。
2 總體思路
根據已建設的 1∶500地形圖庫、激光點云數據庫(點云區域密度為16點/m2)、高分辨率正射影像數據,制定綠地面和綠化覆蓋面快速提取構建的作業流程。其中綠地面構建的作業方式相對傳統,可以從地形圖中直接提取構建。綠化覆蓋面構建通過激光點云提取篩選樹木點,然后根據樹木點構建三角網形成首尾閉合多段線,再利用閉合段線構建融合生成綠化覆蓋面,并對綠化覆蓋面進行修復與效果評價。具體流程圖如圖1所示。
3 綠地構建
城市綠地數據庫最主要的建設內容是綠地面和綠化覆蓋面兩部分內容,其分別對應生態園林城市的建成區綠地率、建成區人均公共綠地、建成區綠化覆蓋率等不同統計指標。其中綠地面積一般理解為綠化占地面積,是指綠地邊界圍合之內所有的公共綠地、道路綠地等硬質景觀[2],以及生產綠地、風景林地等邊界內由于郁閉度原因造成的裸露的土壤都歸為綠地面積[3];綠化覆蓋面積是相對于綠化占地面積而言,其不僅包含綠地占地面積還包括高于地面的冠幅垂直投影面,具體是指城市中喬木、灌木、草坪等所有植被的垂直投影面積,包括屋頂綠化植物的垂直投影面積以及零星樹木的垂直投影面積,喬木樹冠下的灌木和草本植物以及灌木樹冠下的草本植物垂直投影面積均不能重復計算[4]。二者主要區別是在喬木、灌木等高大綠植的冠幅投影面積一般大于其綠地占地面積,而相對于草坪等低矮近地綠植來說綠地面和綠化覆蓋面則是相同的。

圖1 綠地面及綠化覆蓋面構建作業流程圖
3.1 綠地面構建
綠地面構建方式采用傳統的電子地圖綠地面構建方式。首先通過分層提取城市 1∶500地形圖庫中的植被相關數據圖層,對灌木林、疏林、苗圃、竹林、草地、人工綠地、農用地、林用地等面狀綠地可直接作為綠地面。然后對提取的植被點、線數據進行拓撲構面,即可快速完成綠地面的構建。
3.2 綠化覆蓋面構建
綠化覆蓋面構建流程是以福州市機載激光點云數據(16點/m2)為源數據,首先提取點云高于地面一定數值(此處取高于地面 1.2 m以上)的點云數據,其次通過疊加建筑物、構筑物等矢量面數據剔除建筑物、構筑物點云數據,再根據德洛內三角網空外接圓特性對篩選樹木點集構建三角網,最后根據構建的德洛內三角網拓撲構建多邊形面要素并對多邊形面要素進行相鄰面融合,從而完成綠化冠幅覆蓋面的快速構建。
3.2.1 一定高度地物點提取
LiDAR系統直接獲取的是地球表面的三維坐標,因此可以用LiDAR點云數據直接生成數字表面模型DSM。這樣生成的DSM中包含大量的建筑物點、構筑物點、樹木點以及其他非地面點。要想分離提取樹木點,首先需要生成數字地形模型DTM,采用Vosselman提出的以形態學理論為基礎的坡度濾波算法,通過濾波處理,濾掉非地面點,最后使用逐點內插法生成DTM然后通過高程閾值對地面點與地物點進行區分,可采用原始的DSM減去DTM的方式得到規則化的DSM(nDSM)[5]。最后根據建筑物、構筑物與樹木都具有一定高程的特性,再利用nDSM的值對LiDAR數據進行高程閾值分割提取出地物點。
此處相對高程的地物點云數據提取,采用FME Workbench作為具體提取操作軟件,可使用Point Cloud Property Extractor、Point Cloud Coercer、Point Raster Value Extractor、Expression Evaluator、Point Cloud Combiner等轉換器組合把點云生成的nDSM與DTM進行高程計算生成相對高程的點云。具體FME Workbench轉換器的組合示意圖如圖2所示。

圖2 利用FME提取相對高程點云的轉換組合示意圖
然后再利用Point Cloud Property Extractor、Point Cloud Spltter等轉換器提取一定高度的地物點點云。按福州市喬灌木實際冠幅高度情況,對高于地面 1.2 m以上的地物點進行提取。具體FME Workbench轉換器的組合示意圖如圖3所示,以福州市高新區一景激光點云(約 9.6 km2)提取的地物點效果部分截圖如圖4所示和局部放大圖如圖5所示。

圖3 提取一定高度的地物點FME轉換器示意圖
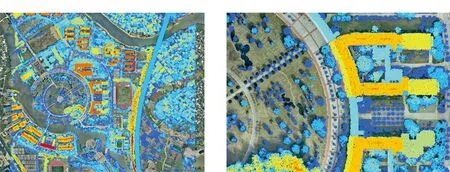
圖4 提取的地物點一景截屏效果圖 圖5 提取的地物點局部放大效果圖
3.2.2 樹木點篩選提取
通過3.2.1方式提取的地物點云,主要包含建筑物、構筑物點云和樹木點云,而綠化覆蓋面構建僅需要對樹木點數據,因此需要剔除掉建筑物和構筑物點云數據的干擾。樹木點的篩選提取操作可利用FME Workbench的cliper轉換器,用提取出的地物點與建筑物、構筑物矢量面數據進行疊加篩除建筑物點云數據,即得到樹木點數據。如圖6是地物點與建筑物、構筑物面疊加局部放大圖,圖7是通過篩除建筑物點、構筑物點的方式提取的樹木點效果局部放大圖。

圖6 地物點與建筑物、構筑物面疊加局部放大圖

圖7 提取的樹木點效果局部放大圖
3.2.3 構建Delaunay三角網
德洛內(Delaunay)三角網是一系列相連的但不重疊的三角形的集合[6]。Delaunay三角網的優點是結構良好,數據結構簡單,數據冗余度小,存儲效率高,與不規則的地面特征和諧一致,可以表示線性特征和疊加任意形狀的區域邊界,可適應各種分布密度的數據等[7]。正是本身的這些優點,常被應用于GIS中的網絡分析中,成為描述地表形態的一種公認方法,是地表(地貌和地物)數字化表現的重要手段和常用分析工具[8]。
根據Delaunay三角網空外接圓特性,以待構建樹木點集作為Delaunay三角網構建中各個三角形的頂點來構建Delaunay三角網。在構建Delaunay三角網的過程中,構建三角網外接圓半徑參數值的設置決定了三角網的構網精度,需要參照預處理過程中樹木點的點間距進行測試設置。設置的初始值一般與待處理樹木點集的點間距相近時構建的效果最佳。其原理是通過Delaunay三角網內的各個Delaunay三角形的外接圓半徑r進行計算,對外接圓半徑r值大于設定初始值alpha的Delaunay三角形進行舍棄,并對組合的網格以單一的三角形為最小單元打散,從而以樹木點集構建成覆蓋植被冠幅區域范圍的Delaunay三角網。
具體操作工具可利用FME平臺的Point Cloud Property Extractor、Point Cloud Coercer(Individual Point)、Hullaccumulator、Triangulator、Deaggregator等轉換器,對樹木點集通過形成封閉凸殼,將封閉殼體范圍內的幾何對象分解成三角形單元網格,從而構建成覆蓋樹木點集區域范圍的Delaunay三角網。如圖8是樹木點云構建三角網在FME Workbench平臺的轉換器組合示意圖。

圖8 綠化覆蓋點云構建三角網的轉換器組合示意圖

圖9 設置不同的alpha初始值時三角網構建效果局部示意圖
如圖9是分別設置外接圓alpha初始值為 0.20 m、0.40 m、 0.80 m時構建的Delaunay三角網效果局部示意圖,從構圖效果不難看出alpha初始值為 0.40 m左右時構圖效果較好,alpha初始值過小則難以構成完整圖形,alpha初始值過大則會出現相鄰三角網粘連的情況。
3.2.4 創建拓撲多邊形面要素
構建的Delaunay三角網中的每一個三角形都可以認為是首尾相連的Polyline(線),從而經過拓撲處理可以構建成一系列無縫拼接的Polygon(三角形區域)[9]。在構建的一系列無縫拼接的Delaunay三角面網中,相鄰接的兩個三角形面都有一個公共邊界線,通過刪除相鄰接三角形公共邊界線來融合兩個三角形面要素,從而創建一個更大的合并四邊形面區域[10]。利用同樣的方式對相鄰接的兩個四邊形面進行融合成更大的多邊形面區域,直至所有相鄰接的Delaunay三角形面融合成一個完整的區域。
此處應用FME Workbench平臺中的Line OnLine Overlayer、AreaBuilder等轉換器,對構建的三角網多段線進行拓撲處理以獲取一系列拓撲關系上連接的閉合多段線,然后對首尾閉合的多段線創建拓撲正確的多邊形面要素,從而生成一系列無縫拼接的不規則三角面網。再利用Dissolver轉換器,通過刪除相鄰接多邊形公共邊界來融合面要素的功能,從而創建更大的合并區域。對由Delaunay三角網拓撲構建的一系列無縫鄰接的不規則三角面網進行相鄰面融合合并,最終將Delaunay三角形要素面融合成綠化覆蓋面。具體拓撲構建三角面網及鄰接三角面網融合處理的流程圖如圖10所示,以福州市高新區一景激光點云(約 9.6 km2)融合生成的綠化覆蓋構面截屏效果圖如圖11所示,其局部放大效果如圖12所示。

圖10 三角網拓撲構面及面區域融生成綠化覆蓋面流程圖

圖11 點云融合生成的綠化覆蓋面截屏效果圖

圖12 融合生成的綠化覆蓋面局部放大效果圖
3.2.5 綠化覆蓋面毛刺修復
激光點云采集及提取篩選中產生的個別噪點,會在構建綠化覆蓋面邊緣生成尖銳的毛刺,具體如圖13所示。這種毛刺的生成影響綠化覆蓋面的構面精度和圖面美觀,需要對毛刺進行消除修復平滑以提升構面效果。此處具體可以采用FME Workbench平臺中的Geometry Coercer、Spike Remover等轉換器,通過設置一定角度和長度值來消除毛刺以修復平滑構建的綠化覆蓋面。

圖13 綠化覆蓋面邊緣毛刺示意圖
3.2.6 綠化覆蓋面效果評價
對激光點云提取樹木點進行拓撲構建的綠化覆蓋面的構面效果驗核評價,其評價原理是綠化覆蓋面與同時期正射影像進行疊加分析其數據拓撲關系一致性情況。具體評價因素包括如下三點:
(1)綠化覆蓋面與正射影像中樹木冠幅垂直投影一致性評價
對采用激光點云提取樹木點進行拓撲構建的綠化覆蓋面與同時期正射影像數據進行疊加比對分析,分別對獨立灌喬木構面、成片灌喬木構面、空曠區域灌喬木構面、鄰近建筑物灌喬木構面、灌喬木構面范圍與正射影像中樹木冠幅垂直投影一致情況、相臨近灌喬木之間粘連構面等情況進行綜合比對驗核評價[11]。發現自動生成的綠化覆蓋面與同時期正射影像的綠植垂直投影套合基本一致,能夠比較準確地勾勒出各種情況的綠植垂直投影范圍面。具體疊加效果如圖14所示,局部放大圖如圖15所示。

圖14 激光點云構建綠化覆蓋面效果圖

圖15 構建綠化覆蓋面疊加正射影像局部放大圖
(2)激光點云中噪點誤構面情況評價
隨機選取福州市高新區9.6 km2范圍的激光點云數據進行自動拓撲構建綠化覆蓋面,然后對構建的綠化覆蓋面進行人工比對篩查統計共計構建綠化覆蓋面 51 139個,總計綠化覆蓋面積 4 166 037.35 m2,篩選出噪點誤構面 17 361個,累計面積 15 497.65 m2,總的噪點誤構面面積占自動構建綠化覆蓋面面積的0.372%。經過分析激光點云中干擾噪點誤構面多為交通桿點、汽車、樹木與建筑邊緣銜接處等噪點,絕大部分噪點誤構面面積小于 0.50 m2,可以通過面積過濾篩除掉,其他通過人工比對檢查可剔除。
(3)激光點云構建與傳統人工繪制綠化覆蓋面效率對比評價
綠化覆蓋面傳統生產作業方式是以高分辨率正射影像為底圖,進行人工判讀繪制綠化覆蓋面。主要存在植被冠幅邊緣判讀精度不高、生產作業效率相對較低等問題。尤其是生產作業效率問題,一般人均日作業面積僅 2 km2~3 km2,致使城市綠化建庫生產更新工期相對較長。而采用激光點云提取樹木點進行拓撲構建綠化覆蓋面的方法,相比傳統生產作業方式則可以很好地解決以上問題,尤其是在生產效率上有指數級的提升。
綜上分析,采用激光點云提取樹木點進行拓撲構建綠化覆蓋面的方法,構建的植被覆蓋面位置精度更優且作業效率有了極大的提升,能夠更好、更快地滿足國家園林城市綠化數據采集建庫的應用要求。
4 結 論
相比以往傳統人工影像判讀繪制綠化覆蓋面的作業方式,采用激光點云提取樹木點拓撲構建綠化覆蓋面的方法,大幅提升了城市園林綠地采集建庫的效率和作業精度。通過對福州市規劃區共 677 km2范圍的城市園林綠地采集建庫實踐,激光點云自動構建城市綠地方法的應用實現了城市綠化數據的快速采集建庫及年度更新的目標。為福州市園林中心及時掌握規劃區園林綠化數據現狀和歷年城市園林綠化指標的變化提供了有效的數據支撐。
