巴哈賽車轉(zhuǎn)向梯形聯(lián)合優(yōu)化設(shè)計(jì)*
2022-03-04 10:55:08李永佶崔康柬田順楊煒
公路與汽運(yùn) 2022年1期
關(guān)鍵詞:優(yōu)化
李永佶,崔康柬,田順,楊煒
(長安大學(xué) 汽車學(xué)院,陜西 西安 710064)
巴哈賽車比賽賽道的路況十分復(fù)雜且惡劣,要求賽車的轉(zhuǎn)向系統(tǒng)在滿足規(guī)則與Ackermann轉(zhuǎn)向關(guān)系的前提下能保證良好的操縱穩(wěn)定性與較強(qiáng)的過彎能力,這就需要巴哈賽車的轉(zhuǎn)向梯形在必要的約束條件下盡可能滿足理論Ackermann轉(zhuǎn)向梯形。大部分轉(zhuǎn)向梯形優(yōu)化設(shè)計(jì)中為方便計(jì)算將轉(zhuǎn)向梯形假設(shè)為平面梯形,但由于汽車主銷有內(nèi)傾角與后傾角,實(shí)際的轉(zhuǎn)向梯形是一個(gè)空間梯形。該文結(jié)合長安大學(xué)巴哈獵辰車隊(duì)2021賽季獵辰Ⅴ號賽車轉(zhuǎn)向系統(tǒng)轉(zhuǎn)向梯形設(shè)計(jì),根據(jù)實(shí)際巴哈賽車的主銷特性建立數(shù)學(xué)幾何模型,利用MATLAB編寫遺傳算法優(yōu)化轉(zhuǎn)向梯形參數(shù)來與理論Ackermann轉(zhuǎn)向關(guān)系進(jìn)行擬合,再運(yùn)用ADAMS虛擬樣機(jī)進(jìn)行前懸架模擬跳動優(yōu)化轉(zhuǎn)向梯形的實(shí)際點(diǎn)坐標(biāo),保證前懸架跳動過程中輪胎定位參數(shù)處于合理變化范圍,從而實(shí)現(xiàn)轉(zhuǎn)向梯形的聯(lián)合優(yōu)化。
1 轉(zhuǎn)向梯形模型建立
1.1 理想Ackermann轉(zhuǎn)向原理
在汽車轉(zhuǎn)向行駛過程中,為避免產(chǎn)生路面對汽車行駛的附加阻力并減小輪胎的過度磨損,要求轉(zhuǎn)向系統(tǒng)能保證汽車所有車輪作純滾動。要滿足該條件,所有車輪的軸線都需相交于一點(diǎn),轉(zhuǎn)向中心O位于后軸延長線上(見圖1)。由幾何關(guān)系可得出轉(zhuǎn)向輪角度的理想關(guān)系式:
(1)
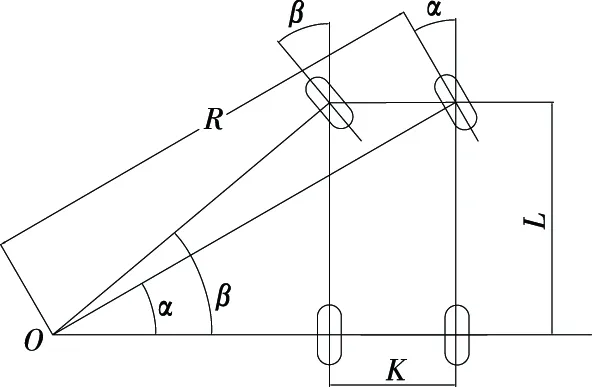
α為理論外輪轉(zhuǎn)角;β為理論內(nèi)輪轉(zhuǎn)角;K為兩側(cè)主銷軸線與地面相交點(diǎn)的距離;L為軸距
1.2 實(shí)際轉(zhuǎn)向轉(zhuǎn)角關(guān)系
理想的Ackermann轉(zhuǎn)向關(guān)系實(shí)現(xiàn)的前提是把輪胎簡化為剛體,而現(xiàn)實(shí)中輪胎并非剛體,且有著不可忽略的彈性形變。在行駛過程中,汽車受到路面的側(cè)向傾斜、側(cè)向風(fēng)或曲線行駛時(shí)的離心力等側(cè)向力的作用,因?yàn)檩喬サ膹椥孕巫儯孛鎸囕啴a(chǎn)生側(cè)偏力,使輪胎產(chǎn)生側(cè)偏現(xiàn)象。由于輪胎側(cè)偏,汽車在轉(zhuǎn)向行駛時(shí)轉(zhuǎn)向中心O點(diǎn)從后軸延長線上移動至O′點(diǎn)(見圖2)。
1.3 優(yōu)化目標(biāo)轉(zhuǎn)向關(guān)系
對于低速轉(zhuǎn)彎行駛的車輛,采用理想Acker-mann轉(zhuǎn)角關(guān)系也就是100%Ackermann系數(shù)是合理的。但對于巴哈賽車,為保證賽車在行駛時(shí)具有高速過彎能力,通常轉(zhuǎn)彎半徑較小,需修正實(shí)際的內(nèi)外輪轉(zhuǎn)角,進(jìn)而確定轉(zhuǎn)向梯形的Ackermann系數(shù)k。公式如下:
(2)
式中:β0為轉(zhuǎn)向過程中實(shí)際內(nèi)輪轉(zhuǎn)角;α0為實(shí)際外輪轉(zhuǎn)角。
采用較低的Ackermann系數(shù)可減小轉(zhuǎn)彎半徑但會產(chǎn)生較大側(cè)偏角,從而對輪胎產(chǎn)生更大的磨損。基于對巴哈比賽賽道路面、巴哈賽車所用輪胎、巴哈賽車實(shí)際行駛工況等因素的綜合考慮,選用35%的Ackermann系數(shù)。
1.4 基本參數(shù)的確定
基于賽車的總布置參數(shù)及圖3所示賽車主銷參數(shù)進(jìn)行轉(zhuǎn)向梯形優(yōu)化的基本參數(shù)設(shè)置。
實(shí)際前輪距rfgg可用下式表示:
rfgg=fgg-2pinoff
(3)
式中:fgg為前輪距;pinoff為主銷偏置距。
實(shí)際軸距L可表示為:
L=wb-pinbdrag
(4)
式中:wb為軸距;pinbdrag為主銷后傾拖距。
兩側(cè)主銷軸線與地面相交點(diǎn)的距離即轉(zhuǎn)向梯形底邊長度K為:
K=rfgg-2htanpinins
(5)
式中:h為轉(zhuǎn)向節(jié)臂與主銷連接點(diǎn)的高度;pinins為主銷內(nèi)傾角。
由轉(zhuǎn)向幾何關(guān)系可推出最大外輪轉(zhuǎn)角O:
(6)
式中:R為轉(zhuǎn)彎半徑。
由Ackermann轉(zhuǎn)向原理,最大內(nèi)輪轉(zhuǎn)角i為:
(7)
平均最大轉(zhuǎn)角ave為:
(8)
1.5 轉(zhuǎn)向梯形布置參數(shù)的確定
根據(jù)車架離地間隙、車架管徑和轉(zhuǎn)向機(jī)半徑等可得出轉(zhuǎn)向機(jī)軸線預(yù)設(shè)高度。為防止轉(zhuǎn)向系統(tǒng)與車架和車身發(fā)生干涉,齒條斷開點(diǎn)長度應(yīng)略大于車身寬度。
2 轉(zhuǎn)向梯形擬合優(yōu)化
2.1 遺傳算法
遺傳算法是模仿自然界的生物遺傳進(jìn)化機(jī)制和自然選擇而發(fā)展起來的隨機(jī)全局搜索和優(yōu)化方法,它模擬的是自然界中生物通過進(jìn)化與遺傳不斷朝著適應(yīng)大自然生存環(huán)境方向的進(jìn)化過程。如圖4所示,該算法通過編碼將要求解的問題轉(zhuǎn)換為遺傳空間的染色體或個(gè)體,產(chǎn)生初始種群后,利用適應(yīng)度函數(shù)對種群的適應(yīng)度進(jìn)行評估,通過剔除適應(yīng)度較差的種群,經(jīng)過交叉、變異運(yùn)算獲得新的種群,找到相似度最高的種群,確定最優(yōu)解。
2.2 轉(zhuǎn)向梯形遺傳算法優(yōu)化流程設(shè)計(jì)
利用遺傳算法進(jìn)行轉(zhuǎn)向梯形優(yōu)化的流程(見圖5)如下:
(1)通過對轉(zhuǎn)向梯形的建模與計(jì)算確定轉(zhuǎn)向梯形的優(yōu)化目標(biāo)與優(yōu)化對象。
(2)結(jié)合賽車賽道行駛狀況確定目標(biāo)函數(shù)。
(3)分析實(shí)際轉(zhuǎn)向幾何在整車上的布置情況與梯形幾何的傳動關(guān)系確定約束條件。
(4)根據(jù)轉(zhuǎn)向梯形幾何學(xué)關(guān)系與經(jīng)驗(yàn)公式確定優(yōu)化對象的參數(shù)取值范圍。
(5)使用遺傳算法進(jìn)行優(yōu)化設(shè)計(jì),找到擬合度最高的最優(yōu)解。
2.3 確定優(yōu)化對象
圖6為前置斷開式轉(zhuǎn)向梯形。根據(jù)已有分析,轉(zhuǎn)向梯形參數(shù)中需優(yōu)化的對象有轉(zhuǎn)向節(jié)臂長度l1、梯形底角φ、梯形高度H。
設(shè)F為理論內(nèi)輪轉(zhuǎn)角。因?yàn)榘凸愜嚥捎?5%Ackermann系數(shù),為使巴哈賽車的實(shí)際轉(zhuǎn)向轉(zhuǎn)角關(guān)系與采用35%Ackermann系數(shù)時(shí)的理論Ackermann轉(zhuǎn)向轉(zhuǎn)角關(guān)系高度擬合,即盡可能使E與F接近,建立轉(zhuǎn)向梯形優(yōu)化目標(biāo)函數(shù),在外輪轉(zhuǎn)角j從0°~最大轉(zhuǎn)角O范圍內(nèi)進(jìn)行轉(zhuǎn)向過程分析。35%Ackermann系數(shù)時(shí)的理論內(nèi)輪轉(zhuǎn)角F為:
(9)
由圖6所示幾何關(guān)系可得:
B=
(10)
(11)
(12)
D=
(13)
E=C+D-φ
(14)
2.4 確定目標(biāo)函數(shù)
考慮到巴哈賽車在賽道行駛時(shí)多數(shù)工況下外輪轉(zhuǎn)角j小于20°,且10°以內(nèi)的小轉(zhuǎn)角使用更頻繁,j大于20°的情況很少,引入式(15)所示加權(quán)因子W(j),使目標(biāo)優(yōu)化值最小,從而確定目標(biāo)函數(shù)minf。
(15)
(16)
式中:jmax為外輪最大轉(zhuǎn)角。
2.5 建立約束條件
根據(jù)圖6所示轉(zhuǎn)向梯形幾何傳動關(guān)系,為保證連桿傳動良好,應(yīng)滿足橫拉桿與節(jié)臂傳動角δ≥30°,橫拉桿與齒條間夾角ξ≤10°。由圖6可知:
(17)
同時(shí)有:
(18)
(19)
(20)
2.6 取值范圍的確定
根據(jù)半經(jīng)驗(yàn)公式得轉(zhuǎn)向梯形理想底角為:
(21)
對于斷開式后置轉(zhuǎn)向機(jī)構(gòu),合適的梯形底角φ應(yīng)在φ0附近,將其范圍擴(kuò)大30°,則φ取值范圍為[φ0-30°,φ0]。
為防止球鉸與摩擦盤發(fā)生干涉,取二者間距為Boy,需滿足:
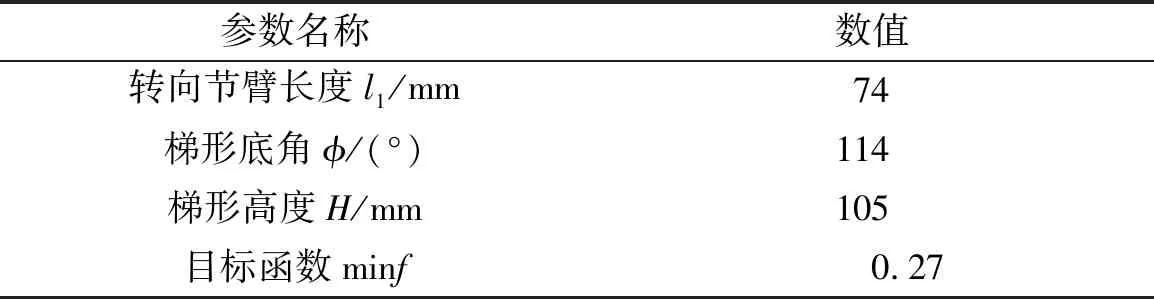
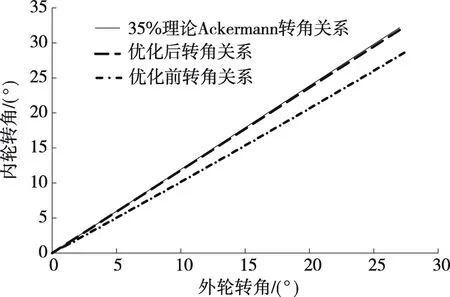
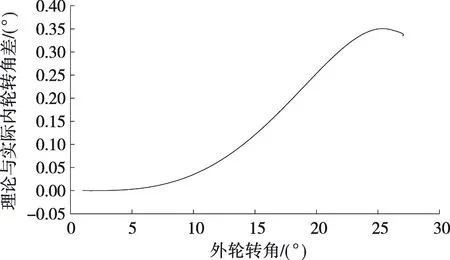
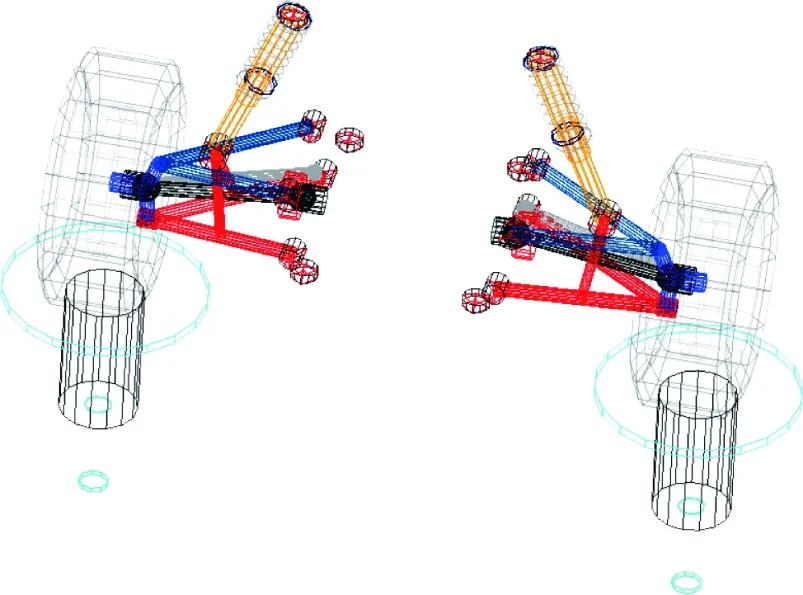
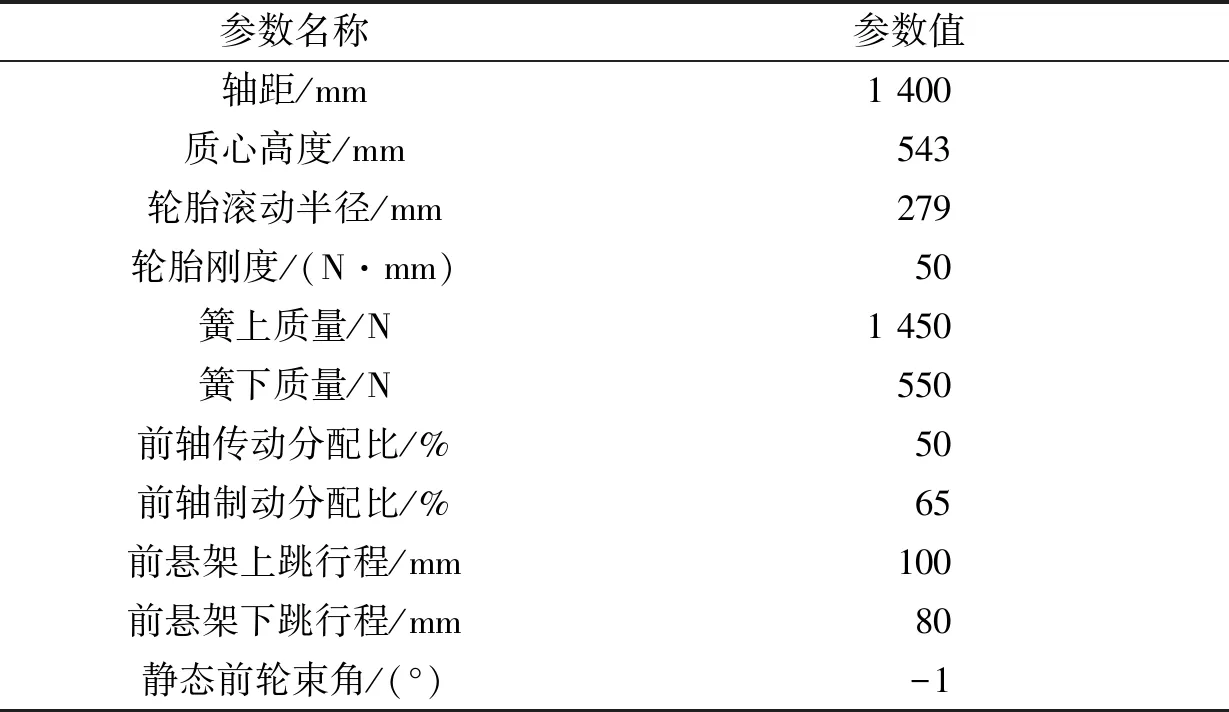
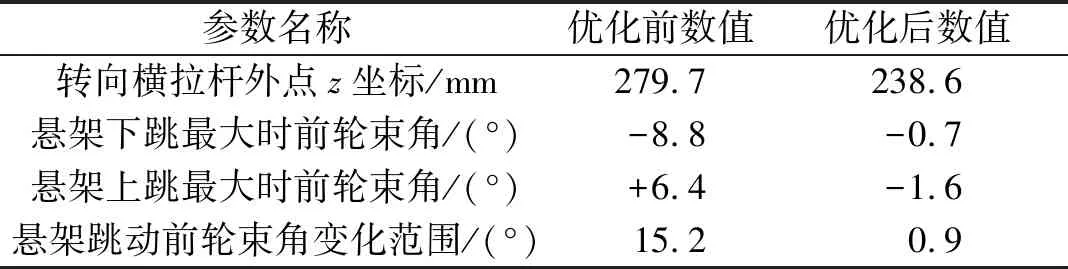
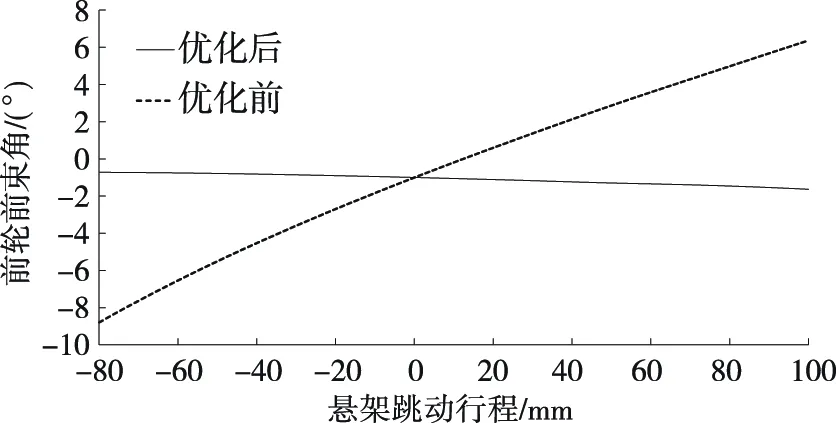
l1×|cosφ(min)| (22) 為防止轉(zhuǎn)向過于沉重,轉(zhuǎn)向節(jié)臂長度不能過短,一般令l1>40 mm。 梯形高度H對傳動角的影響較大,同時(shí)影響轉(zhuǎn)向系的性能。由圖6可得: (23) 帶入數(shù)值計(jì)算取整,可得到H的最大值與最小值,從而確定H的取值范圍。 取優(yōu)化對象的初值為: (24) 以前文計(jì)算的轉(zhuǎn)向梯形基本參數(shù)、目標(biāo)函數(shù)、約束條件函數(shù)及轉(zhuǎn)向梯形優(yōu)化初值為基礎(chǔ),利用MATLAB遺傳算法對巴哈賽車實(shí)際轉(zhuǎn)向關(guān)系與理論Ackermann轉(zhuǎn)向關(guān)系進(jìn)行擬合優(yōu)化,優(yōu)化結(jié)果見表1。 表1 MATLAB GA遺傳算法優(yōu)化結(jié)果 圖7為帶入整車數(shù)據(jù)所得巴哈賽車轉(zhuǎn)向梯形理論值及優(yōu)化前后Ackermann轉(zhuǎn)角關(guān)系對比。由圖7可知:優(yōu)化后轉(zhuǎn)角關(guān)系曲線與35%理論Acker-mann轉(zhuǎn)角關(guān)系曲線的擬合度在外輪轉(zhuǎn)角為0°~10°時(shí)最佳,在10°~20°時(shí)次之,在20°~jmax時(shí)有微弱偏差(1.2%以內(nèi))。各段偏差情況與所取加權(quán)因子W(j)對應(yīng)。根據(jù)表1,優(yōu)化后目標(biāo)函數(shù)minf值為0.27,總體上優(yōu)化后曲線與理論曲線偏差很小,達(dá)到了預(yù)期優(yōu)化目標(biāo)。 圖7 轉(zhuǎn)向梯形Ackermann轉(zhuǎn)角關(guān)系對比 巴哈賽車的理論內(nèi)輪轉(zhuǎn)角與實(shí)際內(nèi)輪轉(zhuǎn)角的差值隨外輪轉(zhuǎn)角的變化見圖8。由圖8可知:外輪轉(zhuǎn)角為 0°~jmax時(shí),理論內(nèi)輪轉(zhuǎn)角與實(shí)際內(nèi)輪轉(zhuǎn)角的最大差值僅為 0.35°,精度較高。 圖8 理論與實(shí)際內(nèi)輪轉(zhuǎn)角差 為進(jìn)一步優(yōu)化轉(zhuǎn)向梯形結(jié)構(gòu),對轉(zhuǎn)向輪定位參數(shù)影響最大的轉(zhuǎn)向梯形點(diǎn)坐標(biāo)進(jìn)行優(yōu)化。利用表1中數(shù)據(jù),結(jié)合轉(zhuǎn)向梯形幾何關(guān)系推導(dǎo)轉(zhuǎn)向梯形各點(diǎn)坐標(biāo),與前懸架硬點(diǎn)坐標(biāo)結(jié)合,即可在ADAMS中建立前懸架與轉(zhuǎn)向系統(tǒng)模型。 由ADAMS insight模塊分析可知轉(zhuǎn)向梯形的轉(zhuǎn)向橫拉桿外點(diǎn)z坐標(biāo)(tierod_outer,z)對前懸架上下跳動時(shí)前輪束角變化的影響最大,為保證車輛在前懸架跳動時(shí)束角變化在合理范圍內(nèi),建立包含前懸架與轉(zhuǎn)向系統(tǒng)的ADAMS/Car模型(見圖9)。 圖9 前懸架與轉(zhuǎn)向系統(tǒng)的ADAMS模型 將整車參數(shù)、輪胎參數(shù)、減振器參數(shù)等ADAMS分析所需參數(shù)數(shù)據(jù)(見表2)導(dǎo)入ADAMS/Car模型中。設(shè)置轉(zhuǎn)向橫拉桿外點(diǎn)z坐標(biāo)為設(shè)計(jì)變量,根據(jù)表2中數(shù)據(jù)進(jìn)行前懸架平行輪跳分析,利用ADAMS優(yōu)化轉(zhuǎn)向橫拉桿外點(diǎn)z坐標(biāo)數(shù)值使前輪束角在懸架跳動過程中的變化范圍最小。 表2 ADAMS分析主要設(shè)置參數(shù) ADAMS/Car優(yōu)化結(jié)果見表3。由表3可知:優(yōu)化前懸架下跳最大時(shí)前束角為-8.8°,上跳最大時(shí)前束角為+6.4°,前輪束角變化范圍為15.2°,變化范圍過大,會使轉(zhuǎn)向操縱不穩(wěn),對賽車操縱穩(wěn)定性的影響很大;優(yōu)化轉(zhuǎn)向橫拉桿外點(diǎn)z坐標(biāo)后,前懸架下跳最大時(shí)前束角為-0.7°,上跳最大時(shí)前束角為-1.6°,前輪束角變化范圍為0.9°,相較于優(yōu)化前大大減小,處于合理范圍。前束角的變化見圖10。 表3 ADAMS/Car優(yōu)化結(jié)果 圖10 優(yōu)化前后前輪前束角變化范圍對比 與MATLAB優(yōu)化后轉(zhuǎn)向梯形各點(diǎn)坐標(biāo)相結(jié)合,完成了轉(zhuǎn)向梯形的聯(lián)合優(yōu)化設(shè)計(jì),優(yōu)化確定的轉(zhuǎn)向橫拉桿外點(diǎn)z坐標(biāo)為238.6。 該文提出一種巴哈賽車斷開式轉(zhuǎn)向梯形聯(lián)合優(yōu)化設(shè)計(jì)方案,通過分析實(shí)際巴哈賽車的主銷參數(shù)與轉(zhuǎn)向幾何關(guān)系建立轉(zhuǎn)向梯形幾何模型,并確立目標(biāo)函數(shù)與約束函數(shù)。按照理論Ackermann轉(zhuǎn)向轉(zhuǎn)角關(guān)系,使用MATLAB遺傳算法對轉(zhuǎn)向梯形參數(shù)進(jìn)行優(yōu)化,使實(shí)際轉(zhuǎn)向梯形的轉(zhuǎn)角關(guān)系與理論Acker-mann轉(zhuǎn)角關(guān)系相擬合。使用ADAMS虛擬樣機(jī)仿真模擬前懸架跳動來優(yōu)化轉(zhuǎn)向梯形坐標(biāo),驗(yàn)證前輪前束角變化范圍處于合理范圍,轉(zhuǎn)向梯形的優(yōu)化設(shè)計(jì)合理。3 優(yōu)化結(jié)果分析
4 ADAMS虛擬樣機(jī)優(yōu)化
4.1 建立前懸架與轉(zhuǎn)向的ADAMS模型
4.2 ADAMS優(yōu)化結(jié)果分析
5 結(jié)語
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
