基于SLAM技術的普定大壩三維重建研究
2022-03-04 23:24:49盧斌王家志王賢發賀秋偉
科技資訊 2022年2期
盧斌 王家志 王賢發 賀秋偉

摘要:在大壩內部廊道的測繪任務中,激光掃描技術無法使用 INS 和 GPS 獲取數據采集設備的位姿數據,導航系統的 SLAM工程是用于解決這一問題的核心技術,它可以充分利用激光掃描儀的場景數據,實現硬件平臺的定位和外部環境的構建。該文綜合應用多技術融合的室內定位導航技術、非閉環檢測的誤差校正技術和激光點云和全景影像融合等新技術,改變了傳統測量方式,大大提高了大壩內外部空間實景三維數據的生產效率和數據精度。
關鍵詞:SLAM? 大壩三維融合
中圖分類號:TU198文獻標識碼:A??? 文章編號:1672-3791(2022)01(b)-0000-00
Research on 3D Reconstruction of Puding Dam Based on SLAM Technology
LU Bin1? WANG Jiazhi1? WANG Xianfa1? HE Qiuwei2
(1. Puding Power Generation Company,Guizhou Qianyuan Electric Power Co., Ltd.,? Anshun, Guizhou Province, 562100 China; 2. Guizhou Jingwei Botong Technology Co., Ltd., Guiyang, Guizhou Province, 550081 China)
Abstract: In the surveying and mapping of dam internal corridor, the laser scanning technology can not use INS and GPS to obtain the pose data of data acquisition equipment. The SLAM project of the navigation system is the core technology to solve this problem. It can make full use of the scene data of the laser scanner to realize the positioning of the hardware platform and the construction of the external environment. This paper comprehensively applies new technologies such as indoor positioning and navigation technology of multi technology fusion, error correction technology of non closed-loop detection and fusion of laser point cloud and panoramic image, which changes the traditional measurement method and greatly improves the production efficiency and data accuracy of real 3D data in internal and external space of the dam.
Key Words: SLAM; Dam; 3D; Fusion
隨著智慧城市、文物保護、災害應急響應、室內導航、虛擬現實等對室內精細化3D模型的需求越來越多,如何快速有效地獲取室內3D精細化模型成為了研究熱點。近年來,針對室內3D重建,出現了以3D激光掃描技術和近景攝影測量技術為主的測量手段[1]。相比較而言,3D激光掃描技術效率更高。然而,由于傳統靜態3D激光掃描技術不能實時快速地進行整體3D重建,所需工作量仍然較大。隨著同步定位與地圖構建(simulta-neous localization and mapping, SLAM)技術日趨成熟,室內3D實時快速重建成為可能。
1基于SLAM算法的移動測量
SLAM的基本工作原理是:當環境和自身位置無法確定時,機器人在運動過程中逐漸構建增量地圖,實時估計自身位置和姿態,最終實現自身自主定位和導航[2]。近年來,國內外眾多科研單位和企業將研發力量投入到SLAM技術在3D測繪領域的應用上。通過對核心算法的優化,打造了一款移動測量激光掃描機。可用于室外甚至室內的地下等非GPS環境下獲取點云,進行三維建模[3]。這種基于SLAM的3D空間數據采集技術,兼具激光掃描和移動測量技術的優勢,成為一種新興的3D移動測量技術,在3D建模領域取得了重大進展[4]。
2任務概述
該次測量的對象為普定水電站,對大壩廊道內部和外部進行三維測量,該水電站站位于烏江上游南源三岔河中游灰巖峽谷河段中普定縣梭篩村,距下游引子渡電站51km,距貴陽市125km,為河岸式電站。
水庫正常蓄水位1145.00m,總庫容4.209億m3,為不完全年調節水庫。電站裝機容量75MW,設計年發電量3.16億kw·h。電站于1989年12月2日開工,1995年5月30日竣工,投入運行至今已23年。
電站樞紐由碾壓混凝土拱壩、壩頂開敞式溢洪道、右岸發電引水隧洞及廠房組成。最大壩高75m,壩體厚高比0.376。設4孔表孔溢洪道,孔口尺寸12.5×11.0m。右岸發電引水隧洞洞徑8m,長280m。廠房位于壩后右岸,內裝3臺立式水輪發電機組。
該工程屬二等大(二)型工程,其永久建筑物按2級建筑物設計,次要建筑物按3級建筑物設計。大壩防洪設計標準為100年一遇,設計洪水位1145.62m,設計洪峰流量5100m3/s;防洪校核洪水位1147.62m,校核洪峰流量6610m3/s。
3 技術路線
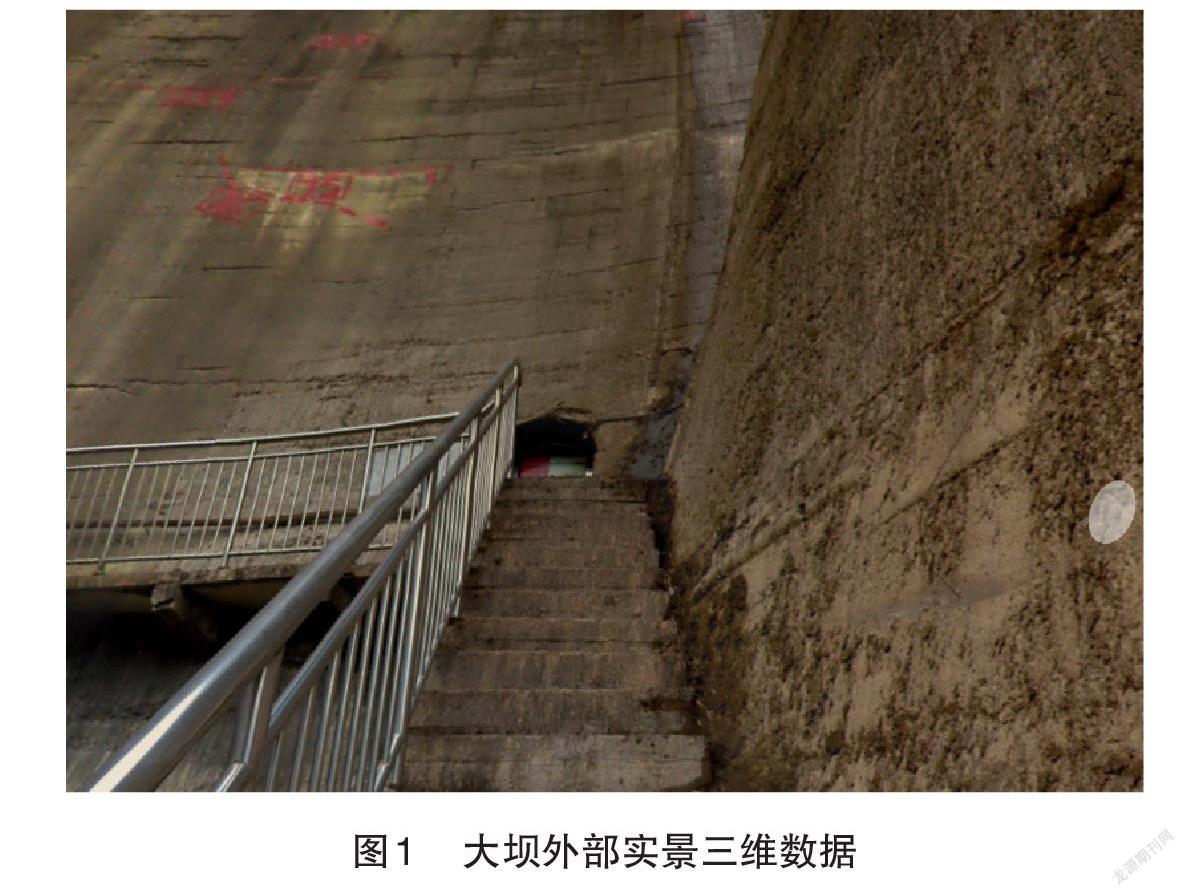
該文使用室內SLAM掃描系統,在整個測繪過程中,3臺激光掃描儀始終保持運作。6臺照相機在執行“停止—運行”程序時默認以1m間隔自動觸發。通常情況下,需要視建筑大小把一個建筑物分成幾個小范圍區域掃描,可根據建筑平面圖把室內劃分成幾個掃描區進行規劃,在掃描完成后便可以自動生成清晰的現場實景三維數據,如圖1所示。
3.1 點云拼接
對于一個完整的實體,一張圖片的掃描信息一般不能顯示該實體的所有特征。這需要在實體的不同位置進行多次掃描。因此,需要解決多幅圖像之間的拼接和連接問題、同名點重合問題。掃描時,掃描儀的方向是隨機且不確定的,需要連接兩個或多個地圖框,通常通過匹配名稱相同的點來實現,此過程是為了獲得間接地理配準[5]。選擇地面上足夠多的特征目標作為控制點,然后利用目標的高對比度特征來實現圖像匹配和定位。掃描時,還需要使用傳統的測量工具(如全站儀)獲取每張掃描圖上控制點的坐標和方位角,然后通過坐標轉換和計算,得到Entity點云。在絕對坐標系中的位置。這些任務不能由計算機自動執行,許多任務需要人工參與,屬于半自動化操作。
3.2 全景影像拼接
將多幅圖像拼接成720°的全景圖,由數據處理平臺融合計算機視覺、計算機圖形學、數字圖像處理以及其他數學工具來完成,涉及的步驟主要有攝像機的標定、圖像的畸變校正、圖像的投影變換、同名點的選取、全景圖像的拼接,圖像的勻光勻色等[6]。
3.3 點云與全景融合處理
基于SLAM的3D激光掃描技術逐漸成為獲取3D空間數據的必要手段,可以快速準確地獲取大量可靠的空間數據。同時,高分辨率數碼相機也可以獲得高質量的二維數、空間數據紋理數據,兩種特征描述正好互補。兩者結合可以生成高精度的真實三維世界,為虛擬三維世界的構建奠定了良好的數據庫。配準得到的彩色點云比強度表示得到的灰度點云更加生動可靠,通過激光點云構建場景的空間信息,將點云與圖像精確融合,形成真正的三維數據庫,如圖2所示。
4 關鍵技術
4.1 多技術融合的室內定位導航技術
GPS信號不能滿足準確的地下和室內定位和導航的要求。目前常用的室內和地下定位技術主要有無線定位、傳感器定位、重合定位等。為了更好地提高定位的速度和精度,兼顧不同定位技術的優勢互補。本文基于圖像識別技術,利用Wi-Fi和藍牙設備幫助獲取大致的地理位置信息,以在比較圖像結構之前縮小圖像識別的搜索范圍。最后,結合智能手機終端自帶的精密傳感設備,可以判斷運動的加速度、角速度和氣壓,大大提高了定位的準確性、可用性和可靠性。
4.2 非閉環檢測的誤差校正技術
雖然SLAM掃描可以根據內部傳感器確定的軌跡估計更靈活地創建內部地圖,但很容易產生累積測量誤差。目前,主要的解決方案是通過重復掃描定期通過的部分區域來建立“封閉路線”,并通過捕捉“已知”環境來生成準確的地圖。但是,當遇到無法閉合的直線路徑或傳感器局部檢測范圍不完整時,該方法無法保證定位導航的實時性和準確性。為此,提出了一種獨立于內部姿態估計并且可以應用于任何路徑的實時地圖校正方法,包括閉環和非閉環檢測。其基本原理是采集SLAM錨點的真實世界位置坐標,并自動將其與采集到的數據集關聯起來作為地理參考,從而優化最終測量數據集的誤差。
4.3 基于空間信息的統一管理
無論是大壩內部廊道或者大壩外部,都通過空間信息化集成到統一的坐標系統和平臺中。平臺從大壩外到大壩內承載了區域內各類實體的空間數據,并且還可以加載各種專業數據,除了可以實現基于實景的可測量、可查詢、可分析等基本功能外,還可以實現裂縫管理、對比等專業功能。此外,在各管理部門內部采用統一的數據,避免了信息的反復采集,極大地降低了人力物力的浪費。
4.4 激光點云和全景影像融合技術
三維激光點云可以精確地記錄實體的空間數據,而高分辨率的全景影像又可以形象地展示實體的二維紋理,二者結合起來能夠生成高精度的真實的三維世界。采用控制點坐標自動匹配技術,找到三維激光點云對應的影像像素,生成彩色點云,為后續三維模型的構建、構筑物結構屬性的識別等提供形象而直觀的參考。相反,用全景影像進行展示時,也可以通過影像的像素坐標找到與之對應的點云,實現對地物的量測運算,在數字大壩中有廣泛的應用價值。
5結語
SLAM理論的發展打破了傳統定位方式的局限性,充分發揮了傳感器的自身優勢,達到了良好的定位和環境構建效果。隨著SLAM 理論在激光掃描測量領域的應用,激光掃描測量技術的測繪精度得到了很大的提高,因此激光 SLAM 技術也越來越受到重視。該文綜合應用多技術融合的室內定位導航技術、非閉環檢測的誤差校正技術和激光點云和全景影像融合等新技術,改變了傳統測量方式,大大提高了大壩內外部空間實景三維數據的生產效率和數據精度。
參考文獻
[1]? 徐博,葛奎,許邦鑫.基于三維激光SLAM技術的電力塔基地形測量方法[J].中國勘察設計,2021(S1):47-50.
[2]? 陳煥劍. 基于激光SLAM的室內外背包移動測量系統關鍵技術研究[D].濟南:山東科技大學,2019.
[3]? 嚴立,井發明.3D SLAM移動測量技術在室內外一體化測量中應用[J].測繪與空間地理信息,2019,42(2):80-82.
[4]? 黃榮恩.基于SLAM的三維激光測量技術研究[D].廣州:華南理工大學,2018.
[5]? 李品鈺,霍亮,宋繼哲,等.測量技術大壩三維監測報警信息系統研究與實現[J].礦山測量,2020,48(2):48-53.
[6]? 鄧汝艷,董蕾.航測與SLAM測量技術融合在房地一體中的應用[J].地礦測繪,2021,37(1):17-22.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45