船舶航向自適應(yīng)控制系統(tǒng)研究
2022-03-04 19:35:21齊跡李建民李偉
航海 2022年1期
齊跡 李建民 李偉

摘 ?要:本文設(shè)計并模擬船舶航向自適應(yīng)控制器,用于解決傳統(tǒng)航向控制非線性系統(tǒng)在復雜環(huán)境下控制效果差的問題。控制器的系數(shù)可由Matlab LMI工具箱計算得出,針對航向控制非線性系統(tǒng),采用自適應(yīng)控制方法設(shè)計控制器,該方法可以保證船舶航向控制系統(tǒng)的全局有界性。最后針對實船驗證,仿真結(jié)果表明該控制器性能良好,控制方法有效。
關(guān)鍵詞:航向;自適應(yīng);控制系統(tǒng);非線性;控制器
0 引 言
隨著航行安全、節(jié)能、降低船員勞動強度等需要的提高,航向控制始終受到人們的高度重視[1-3]。但由于航速、外界干擾等條件的時變性,航向控制系統(tǒng)模型具有典型的不確定性及不穩(wěn)定性,并且航向控制僅能量測航向角應(yīng)用于反饋控制[4]。傳統(tǒng)的控制器設(shè)計都是狀態(tài)反饋控制(特別是針對線性系統(tǒng)),而針對非線性系統(tǒng),特別是非線性項為不可量測狀態(tài)的線性函數(shù)的非線性系統(tǒng)的狀態(tài)觀測器的研究較少[5-7]。本文利用航向控制非線性系統(tǒng)模型的特殊形式,基于Lyapunov設(shè)計了一種船舶航向自適應(yīng)控制系統(tǒng)。
1 問題描述
設(shè)計船舶航向自動舵時,一般采用線性的野本方程建立船舶航向控制系統(tǒng)模型[8]。考慮非線性和外界干擾的影響,引入非線性項和外界干擾項,方程表達式為:
(1)
式中:為跟隨線性指數(shù);為航向角;為非線性指系數(shù);為旋回性指數(shù);為控制舵角。
取,則船舶航向非線性系統(tǒng)模型可轉(zhuǎn)換為狀態(tài)空間表達形式為:
(2)
船舶航向非線性控制系統(tǒng)的控制目的為在僅有系統(tǒng)輸出可以量測的情況下,使系統(tǒng)輸出即鎮(zhèn)定到設(shè)定航向上。為此需要分析系統(tǒng)的結(jié)構(gòu)與組成,設(shè)計航向自適應(yīng)非線性控制系統(tǒng)的控制框架,其基本結(jié)構(gòu)如圖1所示。航向模型參考自適應(yīng)控制結(jié)構(gòu)如圖2所示,相比較自適應(yīng)調(diào)節(jié)器,模型參考自適應(yīng)控制器穩(wěn)定性更高,因此本文基于模型參考自適應(yīng)控制器進行研究。
2 基于Lyapunov的船舶航向自適應(yīng)控制系統(tǒng)
航向自適應(yīng)控制系統(tǒng)以Lyapunov穩(wěn)定性原理為依據(jù),可以保證系統(tǒng)的漸進穩(wěn)定性,而且可適用于系統(tǒng)參數(shù)大范圍變化的情形[9]。系統(tǒng)假設(shè)如下:
①可調(diào)系統(tǒng)為線性時變系統(tǒng),結(jié)構(gòu)已知,參數(shù)可調(diào);
②可調(diào)系統(tǒng)的狀態(tài)變量均為可測。
設(shè)參考模型為:
(3)
可調(diào)系統(tǒng)模型為:
(4)
式中:為廣義誤差向量,可以得到關(guān)于e的微分方程為:
(5)
對任何初始條件xs(0)和分段連續(xù)的輸入r(t),決定As(e,t)、Bs(e,t)的調(diào)整規(guī)律使得廣義誤差漸進趨于0,即
(6)
系統(tǒng)是全局漸進穩(wěn)定的。且當t→+∞時,應(yīng)有
(7)
以此基于Lyapunov穩(wěn)定性理論構(gòu)造自適應(yīng)控制系統(tǒng),構(gòu)造下列二次型正定函數(shù)作為Lyapunov函數(shù):
(8)
其中,,,。
進一步得到
(9)
上述自適應(yīng)律可以保證自適應(yīng)控制系統(tǒng)是全局漸進穩(wěn)定的。
除了系統(tǒng)全局漸進穩(wěn)定外,還要求可調(diào)系統(tǒng)參數(shù)收斂,即
(10)
由于As(e,t)、Bs(e,t)的調(diào)整僅僅依賴于廣義誤差e(t),故當自適應(yīng)系統(tǒng)全局穩(wěn)定時,有,而As(e,t)、Bs(e,t)趨于一個常數(shù)矩陣,即
(11)
可得
(12)
有三種情形可保證該式成立:①C≠0,D≠0,xs、r線性相關(guān);②;③C=0, D=0, xs、r線性獨立。
設(shè)系統(tǒng)的參考模型為:
(13)
(14)
廣義誤差向量為:
(15)
可以看到,需要調(diào)整的系數(shù)僅有和,取
(16)
根據(jù),得到
(17)
(18)
則可取
(19)
最后得到系統(tǒng)參數(shù):
(20)
(21)
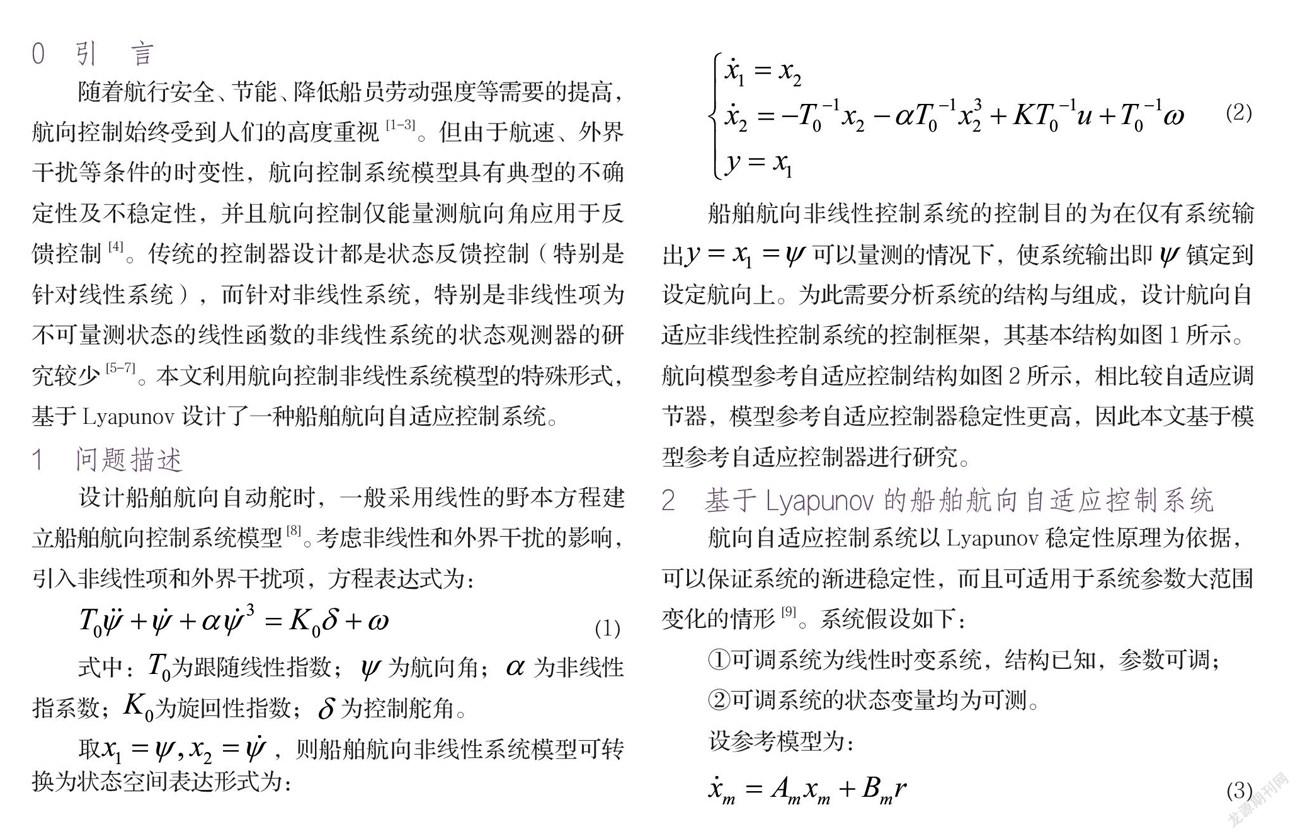
3 仿真分析
仿真研究以“育鯤”遠洋實習船為研究對象,該實習船的基本參數(shù)見表1。
基于Matlab的LMI工具箱,取自適應(yīng)增益γ=1,參考輸入yr為方波信號,其幅值r分別取為0.6、1.2、3.2,采用可調(diào)增益MIT-MRAC算法,其仿真結(jié)果如圖3和圖5所示。
由圖3、圖5可知,參考輸入信號的幅值很大程度影響系統(tǒng)的收斂速度和穩(wěn)定性。
圖3 r=0.6時系統(tǒng)仿真曲線
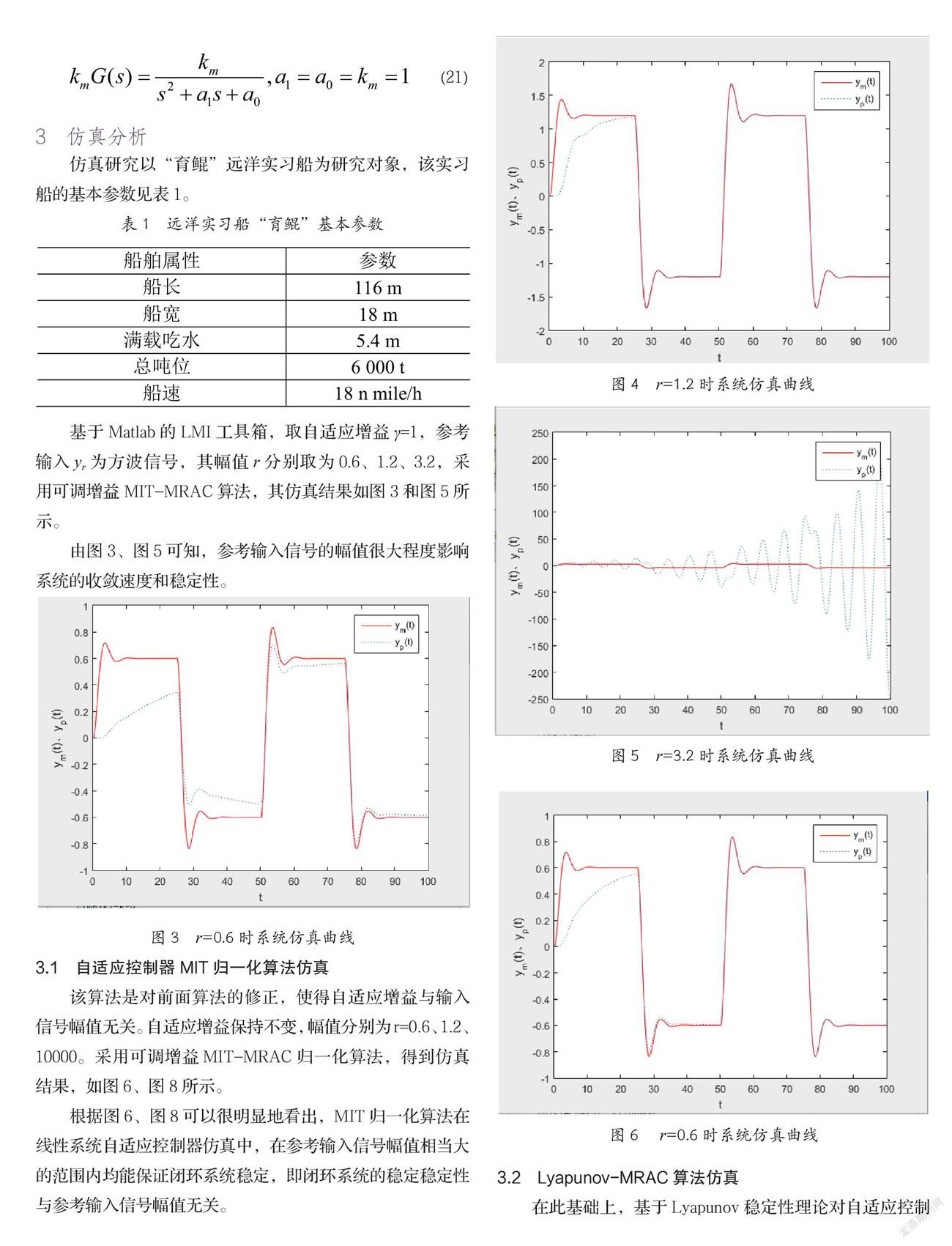
3.1 自適應(yīng)控制器MIT歸一化算法仿真
該算法是對前面算法的修正,使得自適應(yīng)增益與輸入信號幅值無關(guān)。自適應(yīng)增益保持不變,幅值分別為r=0.6、1.2、10000。采用可調(diào)增益MIT-MRAC歸一化算法,得到仿真結(jié)果,如圖6、圖8所示。
根據(jù)圖6、圖8可以很明顯地看出,MIT歸一化算法在線性系統(tǒng)自適應(yīng)控制器仿真中,在參考輸入信號幅值相當大的范圍內(nèi)均能保證閉環(huán)系統(tǒng)穩(wěn)定,即閉環(huán)系統(tǒng)的穩(wěn)定穩(wěn)定性與參考輸入信號幅值無關(guān)。
3.2 Lyapunov-MRAC算法仿真
在此基礎(chǔ)上,基于Lyapunov穩(wěn)定性理論對自適應(yīng)控制器進行仿真。考慮如下被控對象模型:
(22)
選擇參考模型為:
(23)
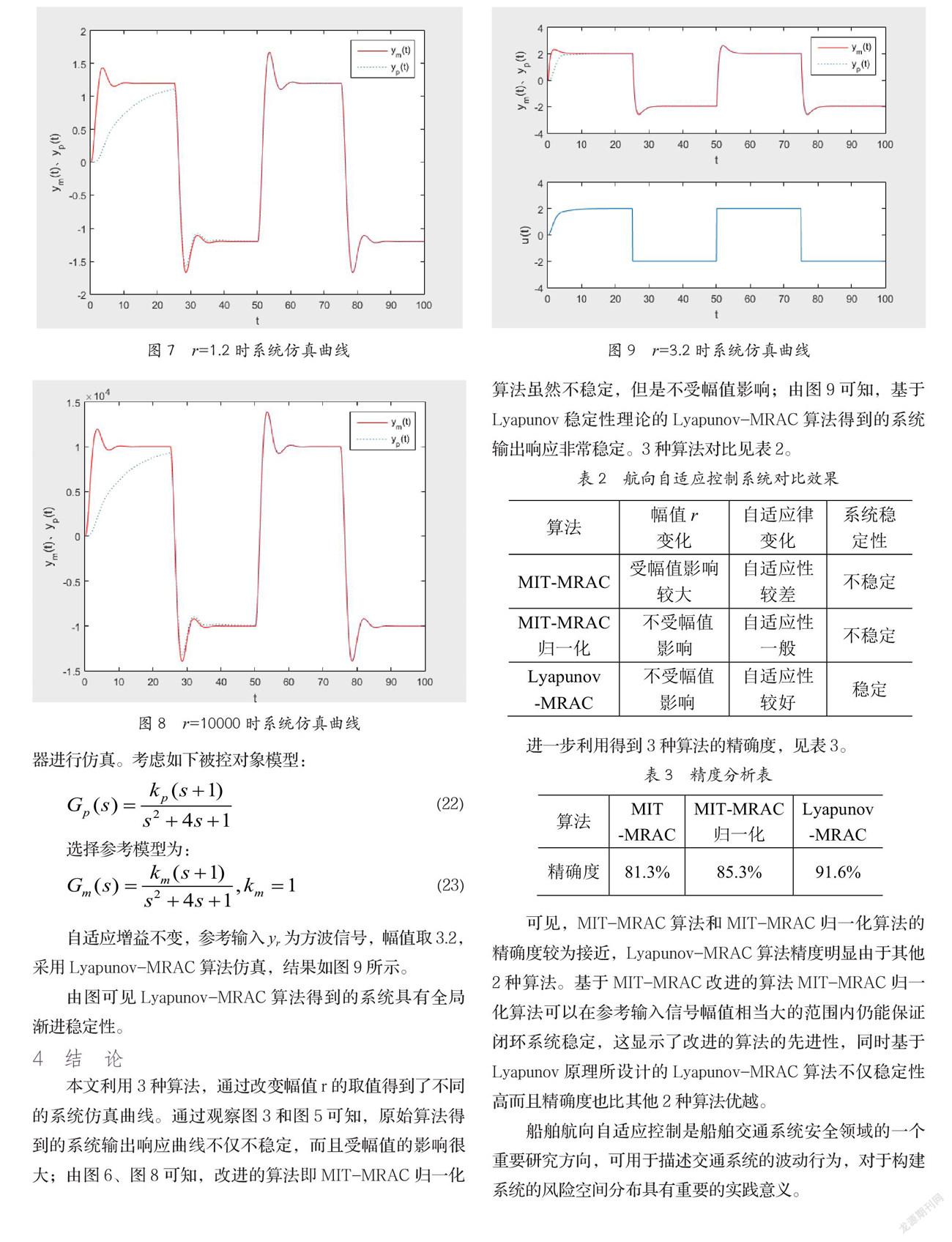
自適應(yīng)增益不變,參考輸入yr為方波信號,幅值取3.2,采用Lyapunov-MRAC算法仿真,結(jié)果如圖9所示。
由圖可見Lyapunov-MRAC算法得到的系統(tǒng)具有全局漸進穩(wěn)定性。
4 結(jié) 論
本文利用3種算法,通過改變幅值r的取值得到了不同的系統(tǒng)仿真曲線。通過觀察圖3和圖5可知,原始算法得到的系統(tǒng)輸出響應(yīng)曲線不僅不穩(wěn)定,而且受幅值的影響很大;由圖6、圖8可知,改進的算法即MIT-MRAC歸一化算法雖然不穩(wěn)定,但是不受幅值影響;由圖9可知,基于Lyapunov穩(wěn)定性理論的Lyapunov-MRAC算法得到的系統(tǒng)輸出響應(yīng)非常穩(wěn)定。3種算法對比見表2。
進一步利用得到3種算法的精確度,見表3。
可見,MIT-MRAC算法和MIT-MRAC歸一化算法的精確度較為接近,Lyapunov-MRAC算法精度明顯由于其他2種算法。基于MIT-MRAC改進的算法MIT-MRAC歸一化算法可以在參考輸入信號幅值相當大的范圍內(nèi)仍能保證閉環(huán)系統(tǒng)穩(wěn)定,這顯示了改進的算法的先進性,同時基于Lyapunov原理所設(shè)計的Lyapunov-MRAC算法不僅穩(wěn)定性高而且精確度也比其他2種算法優(yōu)越。
船舶航向自適應(yīng)控制是船舶交通系統(tǒng)安全領(lǐng)域的一個重要研究方向,可用于描述交通系統(tǒng)的波動行為,對于構(gòu)建系統(tǒng)的風險空間分布具有重要的實踐意義。
參考文獻
[1] 王雪峰.大型船舶橫向非線性減搖自適應(yīng)控制系統(tǒng)[J].艦船科學技術(shù),2021,43(10A):7-9.
[2] 石浩.一種基于AIS數(shù)據(jù)的船舶航線自動規(guī)劃方法[J].上海船舶運輸科學研究所學報,2021, 44(1):25-30.
[3] 段俊利.基于歷史航跡的船舶任意點到港的航線規(guī)劃算法[J].上海船舶運輸科學研究所學報, 2020, 43(2):10-15.
[4] 劉仁偉,薛彥卓.受限水域中船舶自動避碰模型及應(yīng)用[J].哈爾濱工業(yè)大學學報,2018,50(03):171-177+184.
[5] Daejeong Kim, Soonseok Song, Tonio Sant, Yigit Kemal Demirel, Tahsin Tezdogan.Nonlinear URANS model for evaluating course keeping and turning capabilities of a vessel with propulsion system failure in wave[J]. International Journal of Naval Architecture and Ocean Engineering.2021,1-45.
[6] 王振雷,毛福興,王昕.基于切換的多模型二階段自適應(yīng)控制器設(shè)計[J].控制與決策,2018,33(01):143-149.
[7] Dohwan Kim,Yuchang Won,Yongsoon Eun,Kyung-Joon Park.Resilient architecture for network and control co-design under wireless channel uncertainty in cyber-physical systems[J].Transactions on Emerging Telecommunications Technologies,2019,30(4):3490-3499.
[8] 文元橋.船舶行為的語義建模與表達[J].哈爾濱工業(yè)大學學報,2021,53(08):109-115.
[9] Aslam Muhammad Shamrooz,Dai Xisheng,Hou Jun.Reliable control design for composite-driven scheme based on delay networked T-S fuzzy system[J].International Journal of Robust&Nonlinear Control,2020,30(4):1622-1642.
基金項目:吉林省教育廳科學研究規(guī)劃項目(JJKH20200333KJ,JJKH20200329KJ, JJKH20190909KJ,JJKH20190922KJ),國家自然科學基金項目(41671397),吉林省預算內(nèi)基本建設(shè)資金計劃項目(2020C037-7),吉林省科技發(fā)展計劃項目(20191001008XH)
作者簡介:
齊跡,博士,碩士生導師,研究方向:信息工程及控制研究李建民,教授,船長,博士,碩士生導師,研究方向:交通信息工程及控制研究