南疆地區防滲渠清淤機器人的設計
2022-03-02 09:44:10李進韜陳雁忠謝凱靜
新疆農機化 2022年1期
關鍵詞:機械
趙 輝,李進韜,王 飛,黃 勇,王 鵬,劉 焱,陳雁忠,謝凱靜
(新疆工程學院,新疆烏魯木齊830023)
0 引言
新疆地區特別是在南疆地區擁有我國最長的防滲渠道,但在較長時期內并沒有做好渠道的防滲,要想做到節約用水,不僅要重視渠道防滲,提高施工質量,更要提高防滲渠的后期治理和維護,尤其是防滲渠中淤泥和雜物的清理,防止因渠道堵塞造成水資源的浪費。新疆農田屬于綠洲農田,四周一般環繞著沙漠與戈壁灘,防滲渠水源多夾雜著大量泥土,導致防滲渠中易出現淤泥堆積,淤泥的堆積會影響整個防滲渠水網水的流暢度,影響防滲渠水網的整體通水能力。渠道清理不干凈還會影響農田的灌溉和農作物的生長。若渠道堆積物處理不及時,水渠底部會積累大量的泥沙,隨水流動對水泵等設施產生不利影響,在冬季停水期,渠底水流被排干,會使渠道受到的凍害程度加劇,故對防滲渠的清淤和雜物的清理顯得尤為重要。
為了實現清淤目的,本文主要做了以下研究。首先,通過采樣南疆不同地區的防滲渠的淤泥樣本,分析其成分、粘結特性和動力學特性,建立淤泥模型;然后,基于淤泥模型搭建清淤裝置試驗平臺[1-2],尋找清淤裝置的最優結構和最佳動力學參數,為最終整機的設計提供理論依據;最后,結合實際工況,建立整機方案,對其多關節機械臂的動力學和運動學進行分析,建立整機的動力學模型,進行機械臂的軌跡規劃和優化,尋找最佳的工作路徑。對LUDV負荷傳感液壓系統進行研究,選擇合理的傳感器并結合逆運動學的反解和軌跡規劃建立閉環反饋的電液比例閥驅動控制系統,建立該系統的連續時間狀態空間模型和離散時間狀態空間模型,結合前期的運動學和動力學模型分別對多關節機械臂裝置中2自由度的控制和3自由度的控制進行研究,建立基于模型參考的自適應控制模型,最終建立整機的控制系統,設計研發自動清淤機器人的第一代樣機[3]。
1 防滲渠清淤機器人整體設計
1.1 整體結構
本機器人主要包括清淤裝置、傳感器系統、多關節機械臂裝置、引風機、控制系統、軟膠履帶等部分,清淤裝置內設有滾筒刷,并與多關節機械臂裝置固定連接,多關節機械臂裝置下端設有絲桿滑臺,絲桿滑臺安裝在機器人上,引風機通過支撐架固定在機器人中部,控制系統固定在機器人后部,機器人安裝軟膠履帶更方便于水渠內行走,且不易破壞水渠,較輪胎式、金屬履帶有一定的優勢,機器人裝載絲桿滑臺,使機械臂在水渠內運行自如,徹底摒棄了傳統挖掘機清淤時機械臂在水渠內的操作困難,避免了對水渠造成的破壞,解決了轉角位置淤泥難以清理的問題[4]。
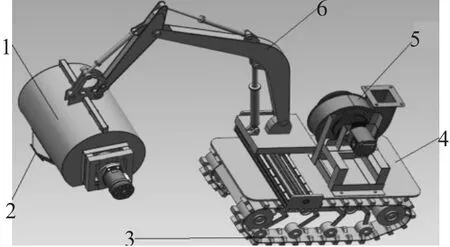
圖1 清淤機器人機械系統1.清淤裝置2.傳感器系統3.軟膠履帶4.控制系統5.引風機6.多關節機械臂裝置
1.2 工作原理
該機器人由控制系統控制在水渠內進行自主清淤,當機器人進入水渠內,控制系統內的GPS定位系統開始工作,規劃機器人的運動路線,然后機器人的多關節機械臂裝置帶動清淤裝置開始工作,機器人同步前進,傳感器系統中的超聲波傳感器同時感知與水渠兩側的距離,從而進行避障,避免與水渠的碰撞,清淤裝置中的滾筒刷對水渠內的淤泥進行清刷,然后通過引風機將淤泥抽到水渠兩側[5]。
2 關鍵部件的設計
2.1 清淤裝置
清淤裝置結構如圖2,主要作用是通過傳感器系統中的壓力傳感器、濕度傳感器檢測淤泥的特性,清淤裝置內的滾筒刷對淤泥使用特定速度、力度進行清理,然后通過引風機抽出。清淤裝置包括擺線液壓馬達、擺線液壓馬達支撐件、滾動軸、保護裝置、螺栓和螺母。擺線液壓馬達與滾動軸固定連接,實現馬達帶動軸轉動的功能,擺線液壓馬達支撐件與保護裝置固定連接,實現固定馬達支撐件的作用,擺線液壓馬達與擺線液壓馬達支撐件螺栓連接,實現固定馬達的作用,使馬達在工作時不會出現晃動和摩擦等問題[6]。
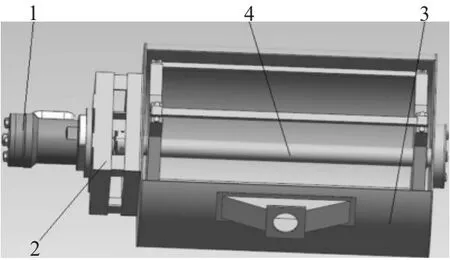
圖2 清淤裝置結構1.擺線液壓馬達2.擺線液壓馬達支撐件3.保護裝置4.滾動軸
2.2 多關節機械臂裝置
多關節機械臂結構的主要作用是通過調節絲桿滑臺的位置以及液壓桿的伸縮長度使清淤裝置可以到達合適的清淤位置進行清淤工作。常見的多關節機械臂有桁架結構機械臂和液壓結構機械臂。由于在本設計中清淤機器人是在現實環境中進行清淤,機械臂具有一定的重量,且要求機械臂可靈活、穩定移動到需要清淤的位置,所以采用液壓結構機械臂。這種機械臂通常由液動機、伺服閥、油泵、油箱等部分組成驅動系統,由驅動機械臂的執行機構進行工作,通常具有很大的抓舉能力,其特點是結構緊湊,動作平穩,耐沖擊,耐振動,防爆性好,可無級變速、定位精度高,可實現任意中間位置的停止,系統的固有振動頻率高,壓力、容量調節容易,重量小、慣性小,可做到經常快速且無沖擊的變速和換向,容易控制,動作平穩,遲滯小。
在本設計中,該多關節機械臂裝置通過絲桿滑臺實現整體的左右移動,達到機械臂在水渠全方位移動的功能,通過液壓桿的伸縮帶動活動臂的升降,從而靈活、穩定到達需要清淤的豎直位置。
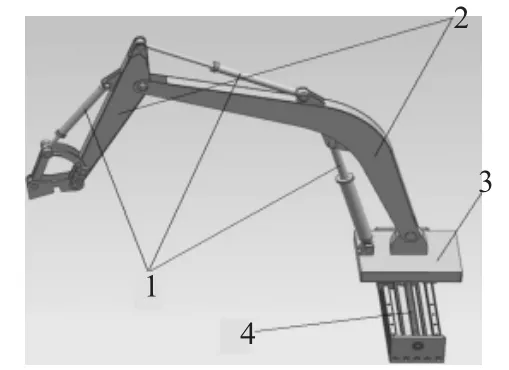
圖3 多關節機械臂結構1.液壓桿2.活動臂3.底座4.絲桿滑臺
3 行走系統結構設計
常見的機器人行走方式有履帶式、輪式以及仿生步行式。在光滑的地面上可以采用輪式機器人或行走式機器人,如在日常生活中常見的服務型機器人[7]。在地面環境比較復雜或者需要較強的平穩性要求時,一般會采用履帶式機器人。
由于南疆地區水渠內粘稠的淤泥以及水渠底部、側部都是由水泥堆砌而成,為了防止機器人陷入淤泥中無法行走以及破壞水渠結構,選擇軟膠履帶。軟膠履帶行走機構可以使機器人在水渠中平穩行走,該機構自適應強、受力面積大、摩擦力大。在履帶板的兩端設孔,與主動輪嚙合,中部有誘導齒,用來規正軟膠履帶,實現防止機器人轉向或側傾行駛時履帶脫落的功能,在與地面接觸的一面有加強履帶銷,用來增強履帶板的堅固性和軟膠履帶與水渠的附著力[8]。
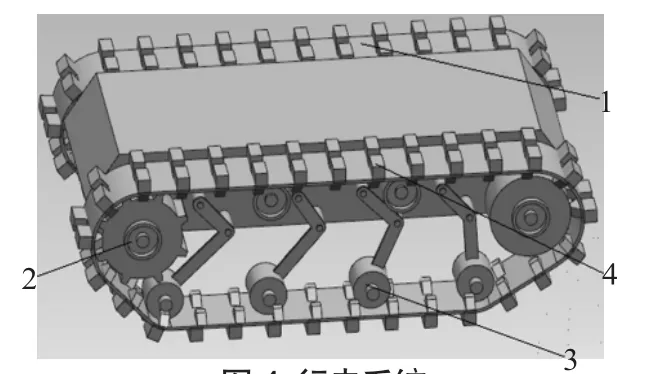
圖4 行走系統1.軟膠履帶2.主動輪3.托帶輪4.履帶銷
4 試驗情況
完成該機器人的整體設計后,制作出模型機,將其放入仿真水渠內,仿真水渠內放入適量泥土,模型機開始工作,清淤裝置中的滾筒刷對仿真水渠內的淤泥進行清刷,然后通過隔膜泵將淤泥抽到仿真水渠旁的水桶內。
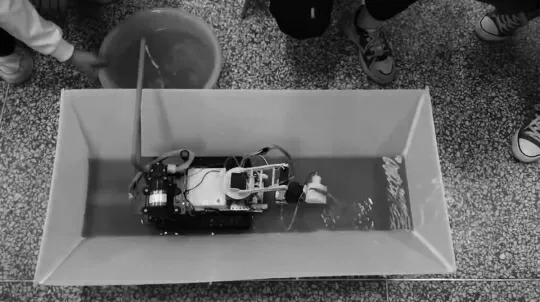
圖5 試驗過程
5 結論
本文為解決現有的南疆地區防滲渠清淤效率低下的現狀設計的一款全自動的防滲渠清淤機器人。該清淤機器人具有以下創新點:
(1)GPS定位系統與超聲波傳感器結合,使機器人運行更精準。GPS提前規劃機器人運行路線,輸入至機器人控制系統使機器人按既定線路運行,然后配合超聲波實時發送脈波,得到機器人在水渠內精準運行的結果。
(2)滾筒刷與引風機的合理配合使清淤效果更好。通過壓力傳感器、濕度傳感器檢測淤泥的特性,滾筒刷對淤泥使用特定速度和力度進行清理,然后及時通過引風機抽出。
(3)軟膠履帶的設計使機器人可在行走自如的前提下保護水渠不被破壞。軟膠履帶自適應強、受力面積大、摩擦力大材質柔軟,可以使機器人在水渠中平穩行走,達到保護水渠不被破壞的效果。
6 展望
因為時間精力有限,本文雖然完成了預期的大部分工作,但在很多方面仍然存在有待完善的地方,后續還可以進行以下幾個方面的工作:
(1)結構設計方面,本文研究的防滲渠清淤機器人只是用于功能演示,屬于模擬原理樣機,結構設計上進行了許多簡化且不作過多要求,如多關節機械臂裝置連接部分采用舵機連接,電路控制器沒有進行很好的防水措施,故后續在這些地方的結構設計上可以進行改進。
(2)測試試驗方面,由于本文中防滲渠清淤機器人的結構設計與控制系統均在很多地方進行了簡化,而且只是原理性功能演示,所以在測試試驗方面也只是驗證相關設計的底層硬件是否能夠實現預期動作,如清淤功能演示時只需驗證滾筒刷是否正常轉動以及隔膜泵是否可將淤泥抽出等,故對于實際應用的南疆地區水渠清淤機器人而言,則可加入相關的清淤試驗,以便能夠用于實際的清淤作業。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
