脈沖壓縮激光雷達多普勒補償方法
2022-03-01 06:37:38張濤,潘璠
激光與紅外 2022年1期
關鍵詞:信號
張 濤,潘 璠
(中國電子科技集團公司第二十七研究所,河南 鄭州 450047)
1 引 言
隨著激光雷達技術的發展,相干激光雷達由于其靈敏度高、可同時測距測速等獨特的技術特點逐漸受到人們的重視。脈沖壓縮技術通過采用脈沖壓縮信號,有效解決了雷達作用距離與距離分辨率之間的矛盾,在現代雷達上得到了廣泛的應用,脈沖壓縮技術同樣可以應用于激光雷達中[1]。目前常用的脈沖壓縮信號為線性調頻信號,將線性調頻脈沖壓縮信號應用于相干激光雷達時[2-3],由于激光雷達的波長比微波雷達小幾個數量級,因此動目標引起的多普勒頻移很大,嚴重影響激光雷達的脈沖壓縮性能,且造成嚴重的距離速度耦合現象,無法有效的進行動目標檢測及精確測距。
針對相干激光雷達動目標探測引起的脈壓及距離速度耦合問題,采用雙頻共軛處理求解速度模糊[4],利用動目標的非模糊速度對目標回波數據進行多普勒補償,然后對補償后的數據進行脈沖壓縮,脈壓性能得以有效改善,且目標的距離速度耦合現象顯著減小,目標測距精度得以有效提高,仿真實驗驗證了該方法的有效性。
2 線性調頻回波信號模型
采用線性調頻脈沖壓縮信號,脈沖寬度為Tp,信號帶寬為B,則激光雷達發射的基帶信號可以表示為:
(1)
其中,rect(·)為矩形脈沖信號。
假設在距離激光雷達一定距離處有一勻速運動的目標,則目標回波信號為:
(2)
目標回波信號經匹配濾波脈壓后的時域信號為:
(3)
根據公式(3)可知,多普勒頻移使得脈壓信號的峰值發生移動,偏移量為:
Δt=fd×Tp/B
(4)
由式(4)可見,脈壓后的目標位置與動目標的多普勒頻率有關,多普勒頻率越大,目標距離與速度的耦合越嚴重,引起的測距誤差越大[5]。此外,脈沖壓縮的匹配函數為發射基帶信號的共軛倒置,只有落在基帶信號帶寬B頻率以內的回波信號能夠有效壓縮,因此,動目標的多普勒頻率越大,匹配壓縮段越窄,脈壓信噪比越低,主瓣展寬越大,嚴重影響激光雷達動目標的檢測性能。
3 基于雙頻共軛處理的多普勒頻率補償方法
激光雷達采用線性調頻脈沖壓縮信號后,可兼顧雷達的作用距離和距離分辨率,但是,在探測動目標時,由于激光的波長較小,會引起較大的多普勒頻移,從而影響激光雷達的脈沖壓縮性能和距離測量精度,進而影響激光雷達的目標檢測和測距能力。若要改善線性調頻脈沖壓縮激光雷達的性能,則需要進行多普勒補償,如果能夠估計出目標的徑向速度,則可以直接進行多普勒補償,實際上目標的徑向速度是不可預知的,而且通常要求激光雷達能夠測量出目標的徑向速度。
由于激光雷達的波長較短,即使較慢速度的運動目標也會產生較大的多普勒頻率,從而造成多普勒速度模糊,本文采用雙頻共軛處理可以求解速度模糊。假設雷達同時發射兩個載頻分別為f01和f02的線性調頻信號,首先對兩個載頻的回波信號進行脈沖壓縮,得:
exp(-j2πf01τn)
(5)
exp(-j2πf02τn)
(6)
由于載頻f01和f02比較接近,因此fd1與fd2所引入的目標位置的距離偏移差在一個距離單元內,式(5)和式(6)共軛相乘處理得:
(7)
對式(7)的幅值開方,則上式轉化為:
exp(-j2π(f02-f01)τn)
(8)
基于雙頻共軛處理的多普勒頻率補償方法信號處理流程如下:
1)對發射載頻分別為f01和f02的目標回波信號分別進行脈沖壓縮;
2)對上述脈壓后的兩個信號進行共軛相乘處理,得到等效中心頻率脈壓信號;
3)將等效中心頻率脈壓信號進行MTD處理,根據過檢測門限目標所在的多普勒單元位置,求解過門限目標的速度;
4)根據上述求解目標速度和脈沖重復頻率,解出激光雷達載頻f01對應的速度模糊數F;
5)應用速度模糊數F,對發射載頻為f01的激光雷達目標回波信號進行多普勒補償;
6)對多普勒補償后的數據進行脈沖壓縮處理。
4 仿真實驗
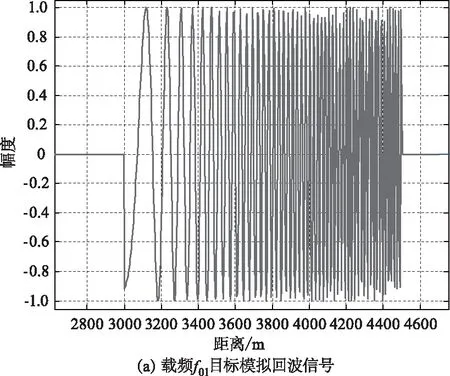
采用目標回波仿真數據開展實驗,仿真參數設置如下:激光雷達波長1550 nm,線性調頻基帶信號的中心頻率分別為100 MHz和700 MHz,基帶信號對激光雷達脈內調制后,激光雷達發射的載波頻率f01和f02之間相差600 MHz,基帶信號時寬10 μs,帶寬10 MHz,脈沖重復周期250 μs,目標的徑向速度Vt=-4 m/s,目標起始距離R0=3000 m,脈沖積累個數為512。
載頻f01和f02的模擬目標回波信號如圖1所示。
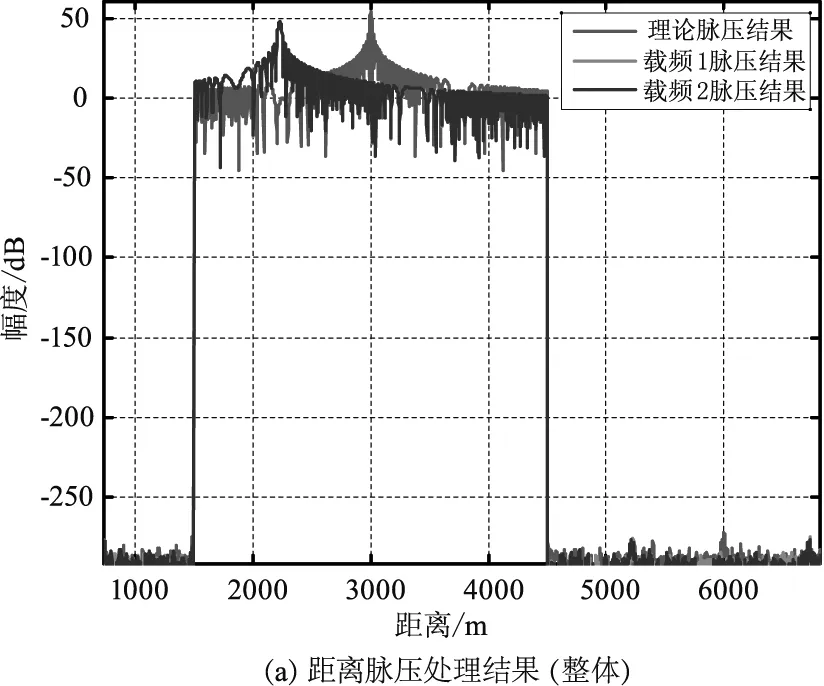
對載頻f01和f02的模擬目標回波信號分別進行脈沖壓縮,脈壓結果與理論理想脈壓結果(完全補償多普勒頻移)如圖2所示。由圖2可見,由于激光波長短,動目標產生的多普勒頻率大,與理論理想脈壓結果相比,載頻f01和f02的回波信號的脈壓信噪比低(下降約6.3 dB),主瓣展寬,且由于距離與多普勒耦合嚴重,脈壓峰值位于3774 m處,嚴重偏離目標的真實位置3000 m處。
載頻f01和f02的模擬目標回波信號分別進行脈沖壓縮后,按照公式(7)、(8)進行雙頻共軛處理,共軛處理后的等效中心頻率脈壓信號如圖3所示。
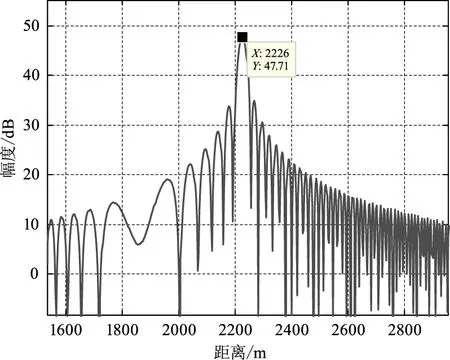
圖3 雙頻共軛處理處理結果
對雙頻共軛處理后的等效中心頻率脈壓信號進行MTD處理,MTD處理結果如圖4所示。
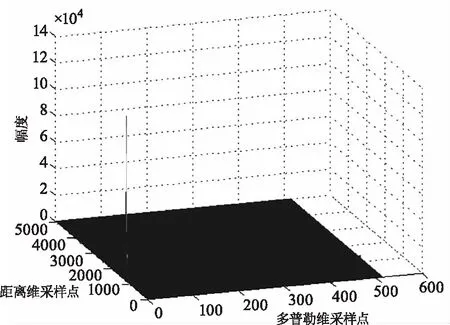
圖4 雙頻共軛處理MTD結果
根據MTD處理結果,過門限目標所在的多普勒位置為第二個多普勒單元,因此動目標的多普勒頻率為:
動目標相應的速度估計為:

=-3.90625 m/s
根據動目標速度估計值vestimate和脈沖重復頻率PRF,可以求解出激光雷達載頻f01對應的速度模糊數F:
根據解算的速度模糊數F對激光雷達載頻f01的目標回波數據進行多普勒補償,補償公式為:
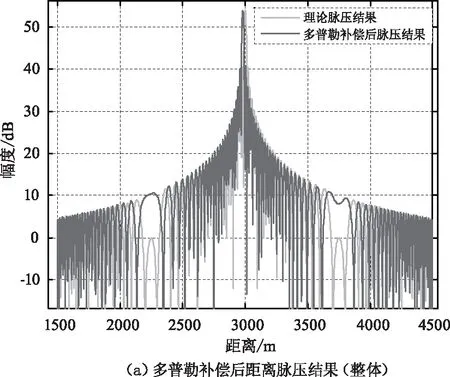
對補償后的激光雷達載頻f01的目標回波數據進行脈沖壓縮處理,脈壓后的結果如圖5所示。
由圖5可以看出,采用本文方法,目標回波信號經多普勒補償后進行距離脈壓,距離脈壓結果與理論理想脈壓結果基本吻合,與理論理想脈壓結果相比,多普勒補償后回波信號的脈壓信噪比下降約0.1 dB,脈壓峰值位于2982 m處,偏離目標真實位置不大,驗證了本文方法的有效性。
為了比較未多普勒補償脈壓、本文多普勒補償后脈壓及理論理想(完全補償多普勒頻移)脈壓結果,將脈壓結果列表表示,具體數值如表1所示。
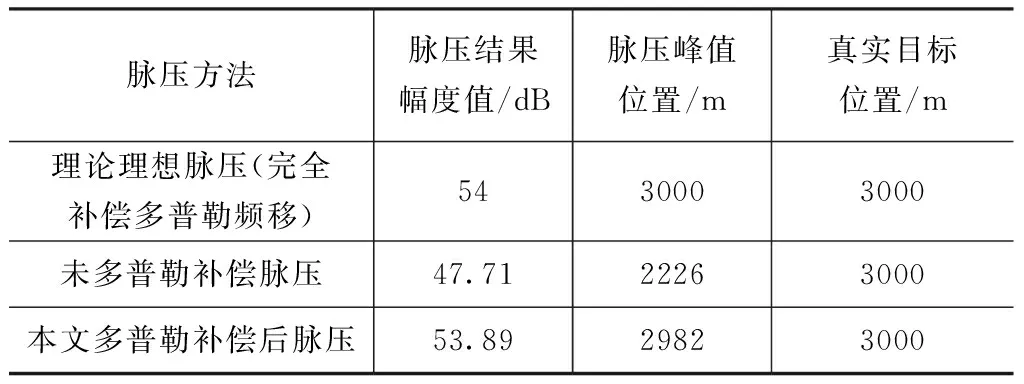
表1 模擬目標脈壓結果比較
由表1可見,與未經多普勒補償脈壓結果相比,采用本文多普勒補償方法后的脈壓結果幅度值提高6.18 dB,目標位置從偏離目標真實位置774 m縮小到偏離目標真實位置18 m,明顯減輕了距離多普勒耦合現象,提升了激光雷達的目標檢測和測距性能。與理論理想脈壓結果相比,多普勒補償后脈壓結果性能略有下降(信噪比下降約0.1 dB),這是由于目標速度先驗信息未知,不能夠完全補償動目標引起的多普勒頻率所致,實際上相干激光雷達動目標的速度是通過對目標回波信號進行MTD處理來估計,所以事先不可預知,也就無法進行精確補償。本文方法由于未能完全補償目標多普勒頻率所引起的脈壓性能略微下降問題在微波脈沖多普勒雷達中也很常見,因此對實際應用的影響微乎其微。
5 結 論
本文探討了激光雷達動目標的脈沖壓縮及距離速度耦合問題,針對線性調頻信號,提出了相應的解決方法,仿真結果驗證了本文方法的有效性。本文方法不需要知道目標的先驗速度信息,對于改善激光雷達對運動目標的檢測及測距性能具有一定的工程應用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06