基于頻域分析的空調溫度控制系統的研究及仿真
2022-02-27 03:27:22孫小康
電子設計工程 2022年4期
關鍵詞:系統
吳 杰,孫小康
(1.江蘇省美術館技術設備保障部,江蘇南京 210018;2.揚州高等職業技術學校,江蘇揚州 225003)
空調已普遍存在于人們的生產生活中,對改善室內的空氣質量起著重要的作用。空調能耗占建筑物總能耗的一半以上。我國是一個資源緊缺的國家,空調的節能可靠運行有著非常重要的意義。計算機系統應用于空調系統可以實現對空調設備進行監督、控制和調節,改善空調系統的調節品質,提高可靠性和穩定性。所以近些年來對空調溫度控制系統的研究已成為熱點問題,空調溫度受外界和內部環境溫度、新風系統、季節變化等擾動影響,使室內溫度變化波動較明顯。空調系統結構復雜,無論是水系統冷量輸配或風系統送風輸出,通過管道行程長,路徑復雜等原因,導致空調系統具有較強的時滯特性[1-2]。空調溫度系統的被控對象常被看成具有時滯的一階、二階系統。工程上常采用基于響應曲線法的PID 整定、基于臨界比例法的PID 整定等傳統PID 方法對時滯系統進行控制,能夠較好地控制,但是在超調量過大、調節時間過長、外部擾動過大時會對系統產生震蕩現象,傳統的PID 難以得到滿意的控制效果。Smith 預估控制器的提出,有效地解決了時滯的補償。針對控制系統的模型失配、外部擾動等原因導致控制效果不理想等問題,文中對Smith 控制器進行廣義等效[3],等效后的被控對象不含時滯過程,對其選用PID 控制結構,對閉環系統的特征方程進行分析,按工程實際選用合適的調節時間,分析閉環極點,整定控制器的PID 參數。文中方法相對于傳統的PID 整定、Smith 預估控制、內模-PID 整定方法具有更快的調節時間,超調量小,對外部干擾具有較好的魯棒性。
1 Smith預估控制
1.1 預估控制理論
Smith 滯后補償的方法是在被控對象的支路增加一個補償器,使增加后的閉環傳遞函數的特征方程中不含有時滯環節,從而改善控制系統的性能及穩定性。實際上預估模型不是并聯在過程上,而是反向并聯在控制器上,對Smith 預估控制器進行等效[4],如圖1 所示。

圖1 Smith預估的控制框圖
圖2 中,引入Smith 預估補償后閉環系統的傳遞函數為:
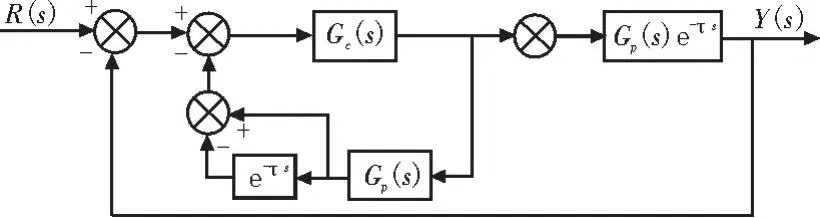
圖2 Smith預估控制的等效圖

式(1)中,Gc(s) 為控制器的傳遞函數,為被控制對象的傳遞函數,e-τs為被控對象的時滯環節。經過Smith 補償后,系統閉環特征方程中不含有時滯環節,閉環特征方程決定系統的穩定性,由于不含時滯環節,系統的穩定性得到很好的改善。下面對Smith 預估控制進行仿真分析,并研究其性能特點。
1.2 Smith 預估控制器仿真分析
某空調室內溫度控制對象一階時滯環節的數學模型為[5]:

式中,慣性環節T=144,延遲時間為30,增益系數為0.99,輸入信號為階躍信號。系統仿真如圖3所示。
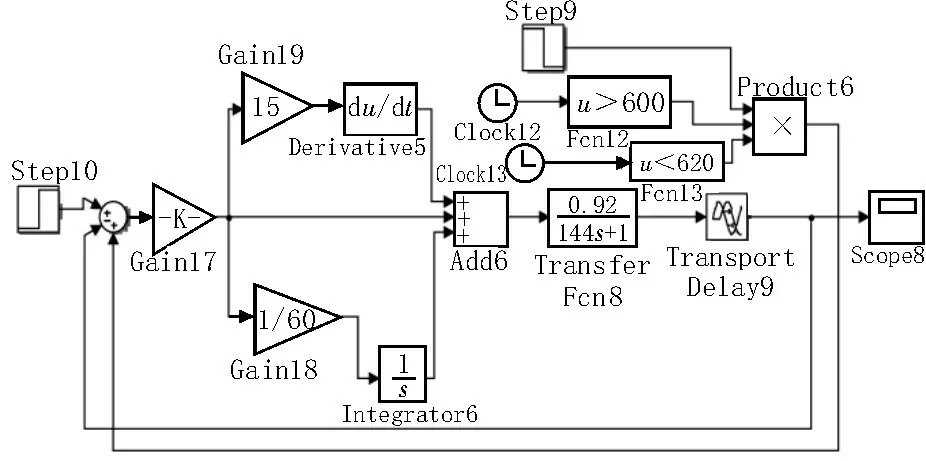
圖3 響應曲線法的PID整定在擾動下的仿真
圖3~5 的溫度控制參考值均為25 ℃,采用響應曲線法PID 控制、Smith-PID 預估控制對被控對象進行仿真[6-8],其中對傳統PID 進行工程整定,各控制參數取Ki=0.1,Kp=6.1,Kd=91.5,Smith-PID 預估控制取Kp=10,Ki=0.5,Kd=200,并在穩定時刻加入一個20 s 的外部階躍擾動信號。從響應曲線可以看出,Smith-PID 預估控制在調節時間,超調量、擾動的恢復時間方面都比響應曲線的PID 控制優越,但同時Smith 預估控制仍有較大的超調量,且調節時間和擾動恢復時間較長、系統穩定性及魯棒性性能不高。
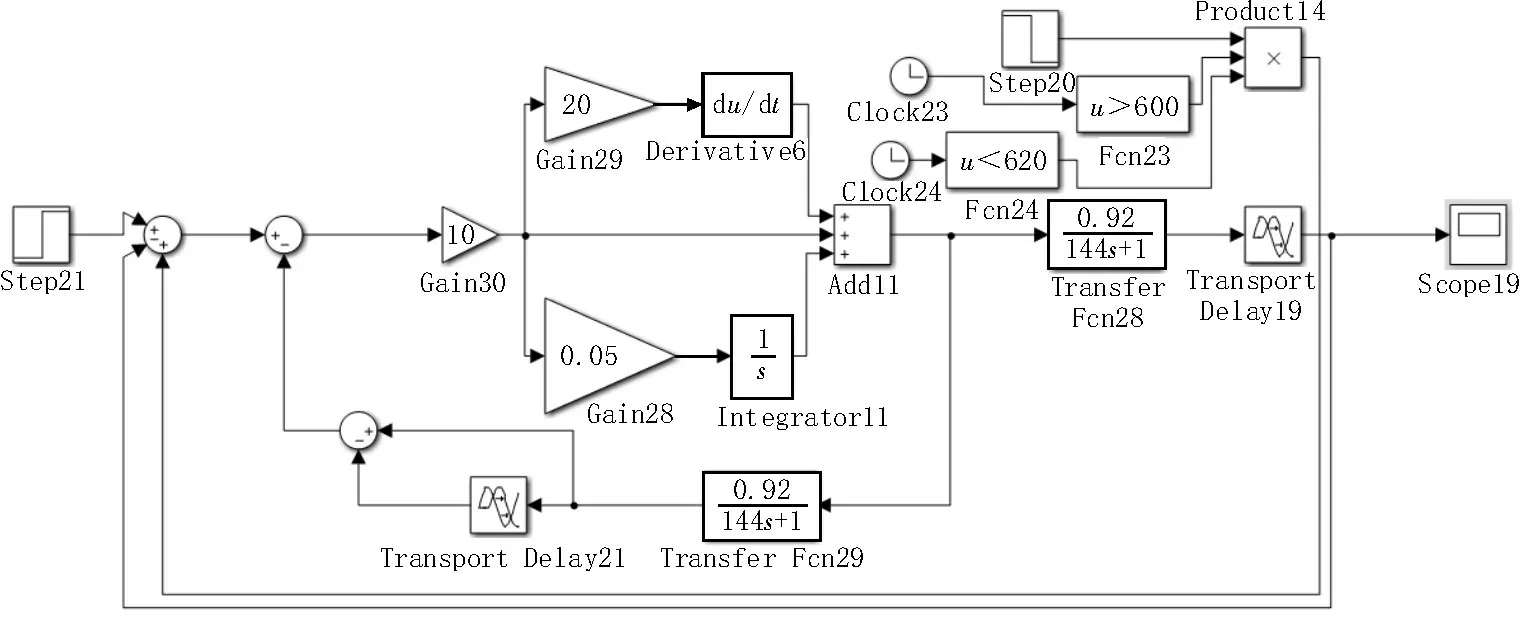
圖4 Smith-PID預估補償在擾動下的仿真

圖5 擾動下二種控制方法的響應曲線
2 頻域分析法的Smith控制器的改進
2.1 Smith 控制器等效分析
文中將預估控制器和被控對象廣義等效,將圖1的控制框圖等效如圖6 所示。

圖6 Smith預估器的廣義等效結構
其中,圖6 的系統結構圖可將虛線部分廣義等效為不含有時滯的被控對象Gp(s),被控對象可以看成不含時滯的一二階系統,分別對不含有時滯的一二階系統選擇PID 控制結構,針對二階系統傳遞函數采用頻域法進行分析:

2.2 一階系統PID控制器參數整定
假設被控對象是一階系統模型[9],傳遞函數為:

由式(4)可知,要使系統閉環傳遞函數化簡為二階系統的標準形式,擬采用PI控制器,用Gc()s表示為:

閉環系統的傳遞函數為:
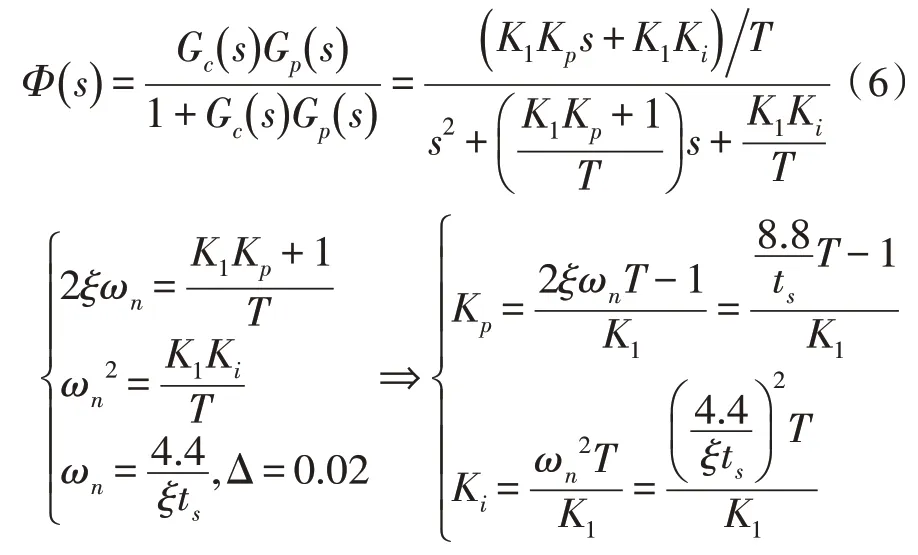
被控對象為一階系統的特征方程為:

對于二階系統來說,在系統理想的情況下,系統工作在欠阻尼狀態,同時閉環系統的特征方程具有負實部的共軛復根。二階系統傳遞函數標準的特征方程形式為[10]:

比較上式,可取:

2.3 二階系統PID控制器參數整定
假設被控對象是二階系統模型[11],傳遞函數為:

要使系統閉環傳遞函數化簡為二階系統的標準形式,擬采用PD 控制器,用Gc(s) 表示:

閉環系統的傳遞函數為:


參照式(7)~(10)的推導過程,被控對象為二階系統的特征方程需滿足:

根據工程實際情況選擇調節時間ts,在已知被控的一階、二階時滯的空調房間溫度的數學模型時,根據ξ、T1、T2、a、K1、K2等參數,分別計算一階、二階被控對象控制器的Kp、Ki、Kd值,通常取阻尼比ζ=0.4~0.8,文中取ζ=0.707。假設在某時刻加入擾動N(s),根據圖6 的廣義等效法,系統的輸入輸出關系可表示為:

其中,

根據系統的穩態誤差和終值定理進行一般性推導如下:

同理,二階系統E(∞)=0,可知一階、二階系統在時間趨于無窮時,系統穩態誤差均為0,因此系統具有較好的穩定性和跟蹤性能[12]。
3 實驗仿真
3.1 一階時滯空調溫度模型
文中選取某空調溫度模型的被控制對象為一階時滯環節,其數學模型為:

分別采用Smith-PID 預估控制、內模PID 控制和文中的控制方法分別進行實驗仿真。對于空調溫度的一階時滯系統,在某時刻加入20 s 的外界階躍擾動信號,內模PID 控制[13]采用FOPTD 的方法進行PI參數整定,其中Kp=2.45,Ki=0.017,文中方法采用PI控制器選取調節時間ts=5,ζ=0.707,T=144,K1=0.92,τ=30,計算得到Kp=274.39,Ki=242.49,仿真結果如圖7 所示。

圖7 外界擾動下的3種控制系統的階躍響應
3.2 二階時滯空調溫度模型
選取某空調溫度模型為二階時滯系統,根據有關空調房間與末端空調箱模型的文獻[14-15]、空調的溫度模型的二階時滯系統,空調房間溫度控制的傳遞函數G0(s)與末端空調箱的傳遞函數相乘可得:

選取和一階時滯相同的方法進行仿真,內模PID控制采用SOPTD 的方法[16]進行PI 參數整定,其中Kp=0.1,Ki=0.387,Kd=0.001 6,文中方法選取調節時間ts=5 s,ζ=0.707,T1=60,T2=61,K2=10,τ=30,計算得到Kp=9.19,Kd=4.46,仿真結果如圖8 所示。

圖8 外界擾動下3種控制系統的階躍響應
根據圖7、圖8、表1、表2 的實驗仿真結果可知,文中方法的超調量比Smith-PID 預估控制明顯減少,且在系統調節時間、過程中擾動恢復時間方面的指標遠小于Smith-PID 預估控制和內模PID 控制,同時文中系統具有較好的跟蹤性能和魯棒性。
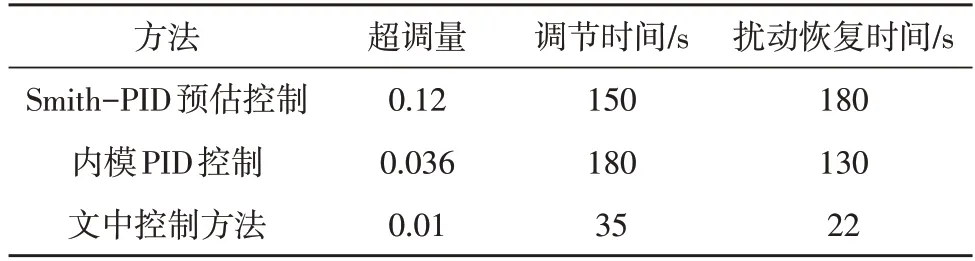
表1 系統性能指標

表2 系統性能指標
4 結論
文中提出了基于頻域分析的空調溫度控制方法,將Smith 預估器進行廣義等效成不含時滯系統,根據二階頻域的標準特征方程進行極點優化配置,選取不同的PID 結構對一、二階時滯進行控制,有效解決了空調溫度控制的時滯問題。仿真結果表明,該方法具有超調量較小、調節時間和擾動恢復時間短的特點,同時具有快速跟蹤擾動性能,可以為工程整定提供一定的參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
