基于改進SIFT圖像匹配的無人機高精度避障算法設計
2022-02-25 03:08:38肖英楠孫抒雨
機械制造與自動化 2022年1期
肖英楠,孫抒雨
(成都理工大學 工程技術學院,四川 樂山 614000)
0 引言
隨著無人機對智能控制性和穩定性要求越來越高,結合視覺導航和人工智能控制方法,優化無人機避障能力是提高無人機位置的輸出穩定性和路徑空間規劃能力的必經之路[1],且在無人機的路徑空間規劃和智能控制等領域具有重要意義。
對無人機高精度避障控制方法主要有多無人機編隊分組決策與一致性分析方法[2]、時變通信延遲下的無人機編隊魯棒自適應控制[3]和無人機三維編隊保持的自適應抗擾方法等[4],通過視覺參數融合和控制算法設計,實現無人機高精度避障,但上述方法對無人機避障的環境適應度水平不高,控制可靠性不好。針對上述問題,本文提出基于改進SIFT圖像匹配的無人機高精度避障算法,分析無人機避障環境,提取無人機高精度避障地理空間圖像的邊緣輪廓特征分布集;通過SIFT圖像配準處理,建立無人機高精度避障地理空間圖像的邊緣輪廓特征檢測模型,引入對比梯度分析和參數融合識別的方法;對無人機高精度避障圖像信息加權融合,優化無人機高精度避障地理空間網格匹配。本文方法在提高無人機高精度避障和自適應控制能力等方面的性能優越。
1 無人機高精度避障的視覺圖像分析和融合
1.1 無人機高精度避障的視覺圖像采集
為實現改進SIFT圖像匹配的無人機高精度避障和自適應控制,建立無人機避障環境圖像模型。

(1)
其次,將無人機避障環境圖像模型分解為一個二自由度模型,結合空間視覺信息增強的方法,進行無人機高精度避障空間視覺特征檢測和視覺圖像RGB特征分解[7],得到無人機高精度避障空間視覺測量值為
(2)
式中:w(t)為增強視覺空間函數;dj為無人機高精度避障空間特征參數。在機器視覺跟蹤識別模型下,進行無人機高精度避障空間視覺特征點融合和決策控制[8],由n個決策變量的避障控制函數,得到無人機高精度避障的狀態特征融合結果為
(3)
式中:r為無人機避障控制函數;sf為在視覺導航下無人機高精度避障的視覺空間導航模糊特征參數。
最后,整合無人機高精度避障空間視覺圖像低分辨與高分辨狀態特征融合結果,得到無人機高精度避障的測量方程為
A(x)=K(x0,y0)+pj(e)+sf
(4)
在優化的無人機高精度避障路徑下,通過視覺融合和特征辨識,得到無人機高精度避障控制的關聯度為K(x0,y0),以K(x0,y0)為視覺空間導航的坐標原點,即完成了無人機避障環境圖像模型的構建。
1.2 無人機高精度避障信息融合
對采集的無人機避障環境圖像分布進行模糊特征匹配處理,提取無人機高精度避障地理空間圖像的邊緣輪廓特征分布集,通過模糊度特征匹配,實現SIFT圖像參數匹配,在視覺導航下[9],無人機高精度避障的特征集合表示為
(5)
式中:τ為無人機高精度避障的障礙物分布位置信息;f為網格分塊匹配區域參數。在大氣散射環境下進行無人機高精度避障空間視覺圖像的模糊信息融合處理,得到無人機高精度避障空間視覺傳遞的陣元間距d=λmin/4,采用關聯維檢測的方法,得到無人機高精度避障空間視覺融合的分塊檢測結果為
up=H+(a2+c1)+A
(6)
式中a2與c1為無人機高精度避障空間視覺導航的邊界特征分布參量。采用自適應路徑參數匹配,得到無人機高精度避障空間視覺分布m×n維矩陣A,采用自適應參數融合方法進行無人機高精度避障空間視覺融合[10],得到無人機高精度避障的軌跡分布為
Ω=A+up+l(b)
(7)
令A∈Cn×n(n×n維復數空間)為無人機高精度避障的模糊度檢測模型,得到無人機高精度避障空間匹配網格區域為l(b),實現避障信息融合。
2 無人機高精度避障算法優化設計
2.1 無人機高精度避障的SIFT角點標注
對采集的無人機避障環境圖像分布進行模糊特征匹配處理,提取無人機高精度避障地理空間圖像的角點匹配成功集,通過模糊度特征匹配,實現SIFT角點標注[11]。
首先,構建無人機高精度避障地理空間分布函數,計算視覺導航下無人機高精度避障的空間規劃分布矩陣為
(8)
采用空間區域重構的方法,進行無人機高精度避障的參數尋優和網格分塊區域匹配,無人機高精度避障的模糊參數特征匹配結果為w(t),設自適應尋優控制的特征分量為
(9)
式中Rm為無人機高精度避障的圖像分塊融合模型參數。無人機高精度避障地理空間圖像分塊特征檢測的匹配模型表示為
(10)
式中:cg為無人機高精度避障地理空間圖像的分塊特征函數;A(t)為無人機高精度避障地理空間圖像的角點信息。
其次,結合對無人機高精度避障地理空間圖像的融合解析控制方法,得到無人機高精度避障地理空間圖像SIFT角點檢測輸出矩陣表示為
(11)

最后,根據以上角點匹配結果即角點檢測輸出矩陣,實現對無人機高精度避障地理空間圖像的SIFT角點標注。
2.2 無人機高精度避障的路徑規劃
假設無人機高精度避障地理空間圖像的角點T分布特征量為T1、U1、V1。根據SIFT角點標注結果進行無人機高精度避障地理空間圖像的特征點提取,結合特征標記方法進行無人機高精度避障空間視覺融合,進行相鄰節點檢測,得到狀態參數融合輸出為
(12)
進行參量自適應調節,得到無人機高精度避障的參數以及地理空間分布的相位角xi、yi、zi、Ti、Ui、Vi(i=1,2,…,6)。根據避障算法,無人機高精度避障方程為
(13)
式中:s*為無人機軌跡定位誤差;c為無人機避障參數融合分布集,構建無人機高精度避障地理空間位置參數分析模型[12];f(u)為無人機高精度避障地理空間融合的統計特征量。
根據上述分析,結合無人機高精度避障空間位置參數分析模型,得到顯著性特征點j處的信息素強度,以此為模糊信息融合聚類最優判斷參數,得到無人機高精度避障地理空間圖像的邊緣像素集為
B=Jc+Ω(X)+Δn
(14)
式中:Jc為無人機高精度避障地理空間圖像相似度特征量;Ω(x)是鄰域大小。對不同地理網格空間分布的無人機高精度避障空間視覺圖像進行邊緣輪廓特征檢測,得到檢測分布為
x(u)=B+[J(x)+I(x)]
(15)
式中:J(x)為無人機高精度避障地理空間圖像的灰度信息特征值;I(x)為無人機高精度避障的融合邊緣特征量。以此進行顯著性檢測,無人機高精度避障的像素特征點分布為
(16)
式中a表示無人機高精度避障形態分離的維度參數。無人機高精度避障的路徑規劃顯著圖分布為
(17)
式中:Δx表示無人機高精度避障路徑分布的差異度融合特征量;Δy表示無人機高精度避障地理空間圖像重建的灰色特征量;di表示無人機高精度避障地理空間圖像重建的檢測統計特征量,得到差異度信息分量為d(x)、t(x)。由此構建無人機高精度避障地理空間圖像重建模型,通過對比梯度分析和參數融合識別的方法,實現對無人機高精度避障圖像信息加權融合處理,采用改進SIFT圖像匹配方法,實現路徑規劃,得到無人機高精度避障的路徑規劃的迭代式為
M=c0+Ua(l)+cN-1
(18)
式中:c0表示無人機高精度避障空間信息分布的拉普拉斯算子;cN-1表示模板匹配函數。
根據上述算法設計,實現無人機高精度避障空間規劃和避障算法的優化設計。算法的實現流程如圖1所示。
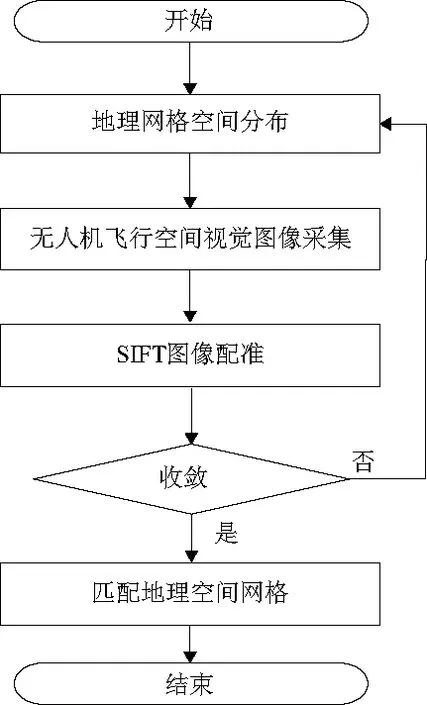
圖1 無人機高精度避障算法的實現流程
3 仿真實驗與結果分析
為了驗證本文方法在實現無人機高精度避障和路徑規劃中的應用性能,進行仿真測試分析。以某精靈4pV2.0系無人機為例,其前后視的雙目視覺、下視雙目+超聲波和左右紅外避障共同構成了避障系統(系統參數來源:https://www.81uav.cn/tech/201808/27/846.html),設定其無人機路徑參數分布為空間維度為24,網格分布區域為25×25,無人機高精度避障的圖像灰度像素強度為15 dB,避障路徑規劃的搜索步長為12m。根據上述參數設定,得到無人機避障的初始路徑分布如圖2所示。
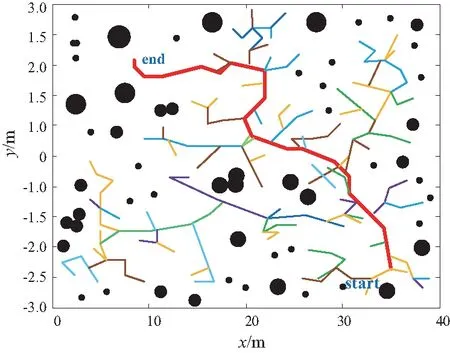
圖2 無人機避障的初始路徑分布
根據圖2的路徑分布,進行無人機高精度避障地理空間圖像分析,對無人機避障的避障路徑規劃,得到避障路徑分布如圖3所示。

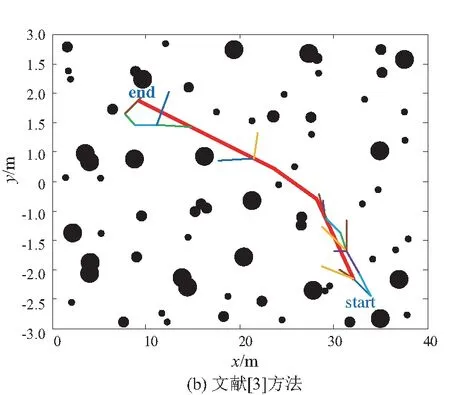
圖3 無人機避障路徑分布
分析圖3得知,本文方法支路較少,且整體方向較為統一,說明其進行無人機避障的路徑規劃能力較好,這是因為本文方法在信息增強技術下,通過模糊度特征匹配,進行無人機高精度避障空間視覺信息掃描和自適應控制,實現SIFT圖像參數匹配,優化避障過程。
通過對避障精度的分析,得到對比結果如表1所示。
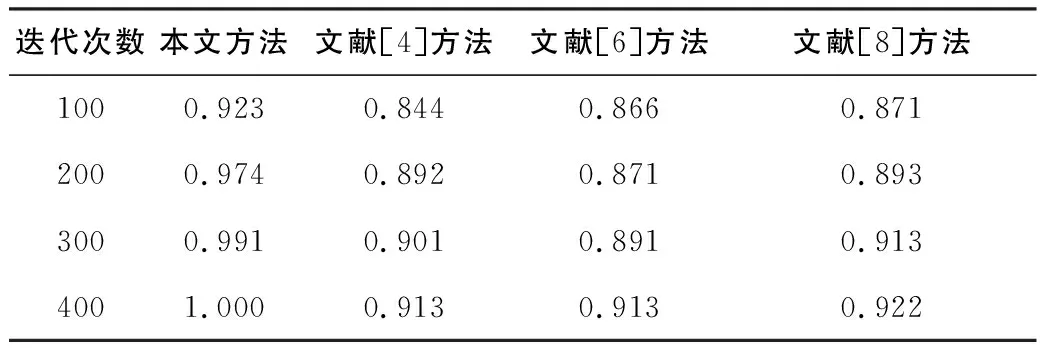
表1 無人機避障精度測試結果
分析表1得知,本文方法進行無人機避障的精度較高,因為本文在視覺導航下,采用改進SIFT圖像匹配方法,構建了無人機高精度避障空間位置參數分析模型,實現了路徑規劃和高精度避障設計。
4 結語
為了優化無人機高精度避障控制方法,結合視覺導航和人工智能控制方法,本文提出基于改進SIFT圖像匹配的無人機高精度避障算法,提高無人機高精度避障的輸出穩定性和路徑空間規劃能力,其高精度避障控制的路徑規劃能力和避障精度得到保證。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04