植保無人飛機施藥技術研究進展*
2022-02-25 02:41:16陳盼陽秦維彩王寶坤
中國農機化學報 2022年1期
關鍵詞:飛機
陳盼陽,秦維彩,王寶坤
(1.南京工程學院,南京市,211167;2.農業農村部南京農業機械化研究所,南京市,201114)
0 引言
由于人工噴灑農藥效率低下且過量的農藥對環境污染巨大,植保無人飛機應時而生。植保無人飛機是無人飛機應用在農業上,起到植物保護作用的無人駕駛飛行器。我國植保無人飛機在2020年其保有量已達11萬臺,作業面積6.67×107hm2·次[1]。
到進入2021年,隨著5G技術、人工智能等的進一步利好,植保無人飛機還將邁入高速增長階段[2]。與傳統的施藥方法相比,航空施藥可以快速應對大面積病蟲害的爆發,不受地形限制,不需要預留的機耕道,減少對土地的壓實。此外植保無人飛機的飛控系統可控制噴藥姿態的調整。航路規劃會影響霧滴覆蓋率和沉降均勻性。旋翼下洗氣流一定程度上會抑制霧滴漂移,并且會影響霧滴的穿透性。田間植保技術和安全施藥技術規范有助于航空植保事業的發展。
因此本文從飛控技術、航路規劃、旋翼下洗氣流的研究、田間植保技術和安全施藥技術規范對國內外植保無人飛機技術發展現狀進行總結,分析發展中面臨的問題,闡述了植保無人飛機技術幾大發展趨勢。
1 植保無人飛機飛控技術
1.1 飛控技術
飛控是無人飛機的“大腦”。從硬件上看,飛控系統包括主單元、慣性單元、無線通信模塊、數據采集模塊、執行器驅動模塊等。飛控流程和構成如圖1、圖2所示。
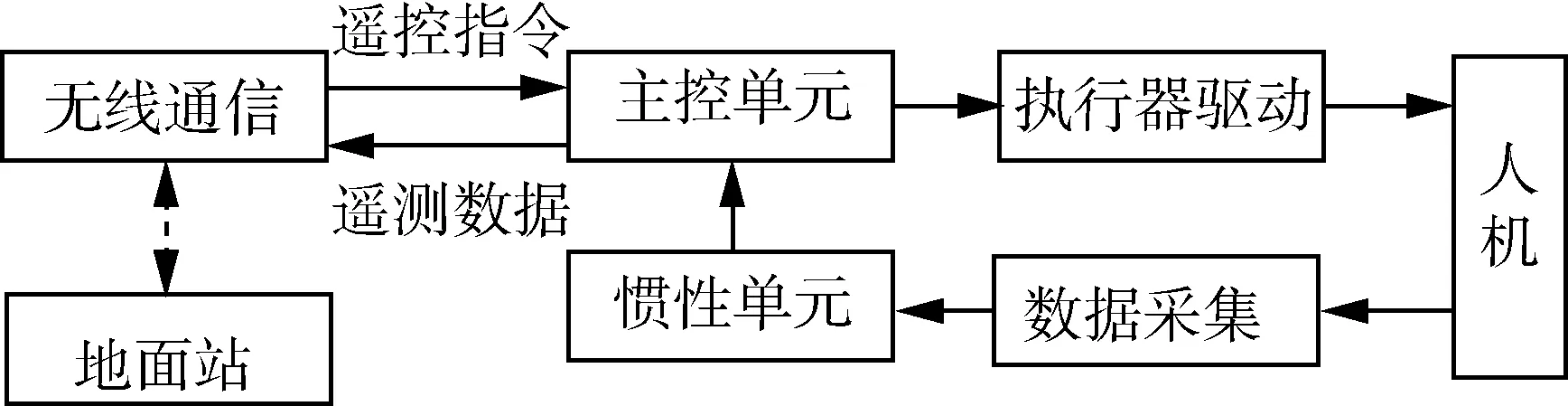
圖1 飛控系統流程圖

圖2 飛控軟件組成模塊
無人飛機軟件架構是通過無線電控制技術發展起來的,一個完整的飛控軟件組成模塊包括:傳感器模塊、通信模塊、控制輸入模塊等等。飛控軟件設計是搭建合理軟件流程,使得各個功能模塊能夠協調有效的工作。
1.2 常用的飛控算法
植保無人飛機的“靈魂”是飛控算法,因此開展飛控算法的研究對平穩飛行、航路規劃、精準施藥等方面都具有重大的意義[3]。表1總結了三大飛控算法的工作原理,為植保無人飛機飛行控制算法研究的開展提供重要參考。

表1 三大飛控算法及工作原理
無人飛機飛控系統的算法多種多樣,而捷聯式慣性導航系統算法的導航方法是利用載體上的慣性元件,去測量飛行器的角運動和線運動信息。將慣性元件直接裝在載體上,會使得坐標變換中計算量大,對元件要求較高[4]。此外依據應用場景的不同,捷聯慣性導航可分為4個級別,如表2所示[5]。

表2 各導航技術性能對比
歐美發達國家的光纖陀螺捷聯慣性導航系統,已經發展到實際應用的階段,并且發展方向是向著高精度和高可靠性。我國光纖陀螺的研制水平在可靠性、精度等方面還有待提高,光纖陀螺捷聯系統在植保無人飛機施藥上的應用處于起步階段。
王養柱等[6]對三回路捷聯慣導算法進行了仿真研究。運動體從起始點北緯40°、東經116°到目標點北緯41°、東經117°,最大飛行高度約7 106 m,是大平飛速度為300 m/s,共飛行約500 s。試驗結果表明,姿態角誤差:500 s內最大航向角絕對誤差大約為-12×10-3°、俯仰角絕對誤差為-8×10-3°、橫滾角絕對誤差為12×10-3°。位置誤差:500 s內最大緯度絕對誤差大約為5×10-3°、經度絕對誤差為-6×10-3°、高度絕對誤差為-5 m。
卡爾曼濾波算法是卡爾曼等人提出的一種遞推濾波算法[7]。此算法采用信號與噪聲的狀態空間模型,對狀態變量的估計采用前一時刻地估計值和現時刻的觀測值來更新,求出現時刻的估計值。卡爾曼濾波便于計算機編程實現,其廣泛應用在導航、通信與控制等眾多領域當中。
毛紅瑛等[8]為了解決慣導的累計誤差問題,導航信息由MEMS AHRS/GNSS組合導航系統來計算。試驗結果表明,擴展卡爾曼濾波算法的姿態角與參考角度非常相近,在試驗過程中,橫滾角的平均誤差為1.188 3°,俯仰角的平均誤差為1.407 5°,偏航角的平均誤差為4.033 7°。此外由經緯度誤差的對比可知,沒有遮擋GPS信號時,其最大誤差是5 m,遮擋GPS信號時,由于用慣性導航來定位,隨著時間的增加,誤差不斷累積,在10 s以內的累積誤差最大值為6 m,其最大誤差達到了20 m。在國外卡爾曼濾波算法經過幾十年的研究和發展,使其廣泛應用在航空航天、無人飛機等處理通信信號的領域當中,該算法有廣闊的應用前景,有待進一步發展。
當純慣性導航精度不夠時需要使用PID控制算法。PID系統具有適應性強和結構簡單優點,且處在環境惡劣情況下依然可靠[9]。利用PID系統在旋翼轉速和姿態信息之間建立比例、積分和微分的關系,通過調節各個環節的參數大小,使植保無人飛機的控制達到動態響應快、既不過調、也不欠缺的效果[10]。
劉鋼[11]為保證旋翼無人飛機的機身飛行平穩,使用STM32嵌入式系統進行模糊PID算法控制。采用模糊PID控制算法的最大超調量比基本PID控制算法的超調量減少了21%,降低到4%,并且調節的時間減少了11 ms,降低到12 ms,提高了系統的動態響應性能。目前歐美發達國家在PID控制算法的理論研究和產品應用上走在前列。例如,Yokogawa電氣、Fuji電氣的溫度控制器、無人飛機的飛控。它們把模糊邏輯PID控制與標準的PID控制結合在一起來防止超調,取得了顯著效果。
1.3 飛控系統
植保無人飛機是通過多種傳感器的融合,將此時的飛行姿態的數據傳回飛控當中,然后通過飛行控制系統來計算和判斷,從而發送新的指令,其動作和飛行姿態的調整最后由執行機構來完成。表3中是目前市場上常用的植保無人飛機飛控系統及其特點。

表3 飛控系統
其中Pixhawk是具有成本低,性能高的系統。其飛控系統是完全開放的,常應用在固定翼和多旋翼上,且與強大功能的地面站Mission Planner(簡稱MP)搭配使用。Pixhawk飛控的植保無人飛機,其通過一些外部功能模塊進行轉換來實現信號的接收或控制。Pixhawk飛控實物圖如圖3。

圖3 Pixhawk飛控實物圖
為了驗證植保無人飛機Pixhawk控制系統的可行性,Yang等[12]搭建了基于Pixhawk飛行控制系統的四旋翼植保無人飛機試驗平臺,遙控器的SwG開關設置為噴灑開關,在100 m范圍內進行了模擬噴霧試驗。試驗結果表明,在Pixhawk飛控系統在100 m范圍內,能成功地分析噴霧開關的狀態,并使噴灑系統發出噴灑指令。
同時,噴霧系統還成功的對噴霧進行分析。針對在室內環境下無人飛機的在GPS信號缺失問題,姚光樂等[13]采用pixhawk飛行控制板運行核心控制部分。測試結果表明,無人飛機位置控制節點通過MAVROS獲取植保無人飛機當前位置和姿態數據,計算出加速度指令,將加速度指令傳遞到Pixhawk系統,由姿態控制模塊實現植保無人飛機自主起飛和懸停功能。
趙航[14]在pixhawk開源飛控系統的基礎上,對多旋翼無人飛機避障飛行控制系統進行研究。試驗結果表面,通過對pixhawk飛控系統運行流程、編譯流程、rcS、uORB等分析。在AltHold、Loiter飛行模式下,完成了無人飛機在飛行高度和姿態上避障應用的開發。
張金錢等[15]設計一款了以控制器核心為Pixhawk的六旋翼植保無人飛機,為了做到植保無人飛機能夠在農田上空穩定的飛行,提出了采用模糊PID控制。試驗結果表明,處理器采用模糊PID算法控制植保無人飛機的飛行狀態,其響應速度有所提高。
蔣彪[16]為了驗證Pixhawk飛控與噴灑系統間串口通信的可行性,選取S550機架搭建小型四旋翼植保無人飛機試驗平臺。試驗結果表明Pixhawk飛控能較好的實現植保無人飛機的飛行控制,且噴灑系統能通過噴藥開關實現噴藥時水量連續均勻。
2 植保無人飛機航路規劃
航路規劃是確定無人飛機從初始點到目標點,除障礙物外最佳的路徑的問題。航線規劃需滿足導航、任務、環境信息、安全性等約束的要求[17]。全覆蓋航線規劃可分為“在線式”和“離線式”,是由Choset[18]提出的。當作業區域周圍環境信息已知是“離線式”;當作業區域周圍環境信息完全或部分未知的情況下是“在線式”。農業植保無人飛機常用的航線規劃方法如表4所示。此外,國內外在多種領域的智能化機械上都應用到全覆蓋航線規劃。例如,智能化機械應用在海軍軍事方面,可以實現水下自動航行、布雷和掃雷等任務。國外的Acar等[19]研究出全覆蓋式掃雷機器人的感知和航線規劃。

表4 航線規劃方法
2.1 牛耕往復和內外螺旋作業法
全覆蓋航線規劃行走的典型方式是牛耕法和內外螺旋法,其覆蓋原理如圖4所示。其中:L為作業區域縱向長度,M為作業區域橫向長度,d為覆蓋作業幅寬。
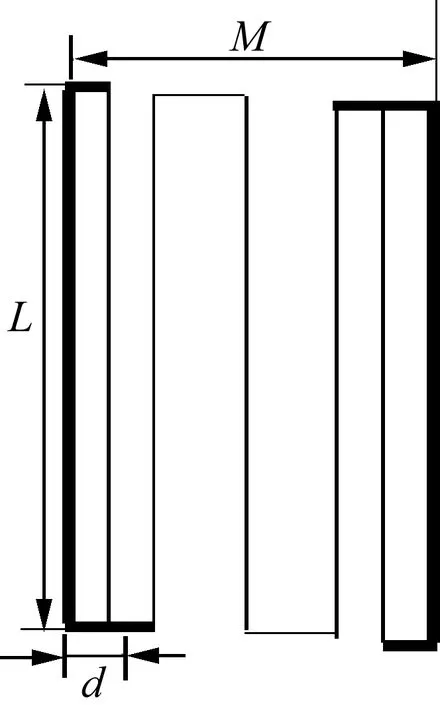
(a)牛耕往復法
圖4中,飛行路線來回往復式的稱為牛耕法,內外螺旋法的飛行路線是依據目標區域的外輪廓制定飛行路線,逐漸靠近目標區域的中心或外輪廓。采用內外螺旋法時,無人飛機在轉彎時需要多次調整航向角,而牛耕法可以保持固定航向角;當作業區域為不規則圖形時,內外螺旋法的航線不規則,且轉彎次數過多;此外采用內外螺旋法時,由于植保無人飛機在轉彎過程并不噴藥,會造成目標區域中一部分重復覆蓋和遺漏覆蓋現象;因此綜合考慮多采用牛耕法的作業方式。
Liu等[20]提出了以搜索最短飛行路徑為目標的路徑規劃算法(MOAA算法),該算法基于牛耕往復法,利用射線法避開了多障礙物和凹多邊形障礙物區域。仿真試驗表明,該算法可以減少總路徑長度,優化率可以達到14.2%。徐博等[21]針對植保施藥多個作業區域的情況,分析了多種覆蓋作業方式的優劣,確定了牛耕法作為無人飛機在單區域內的作業方式。得到了基于遺傳算法與TSP旅行商問題的多個區域間作業順序,仿真結果表明,該規劃算法可以有效地實現全局航線的規劃,縮短了植保無人飛機的作業距離與區域間調度飛行的距離。武錦龍[22]針對多個作業區域,選擇了轉彎次數少,噴藥覆蓋率高的牛耕法。提出了一種基于粒子群算法的全局作業,將多塊區域作業路徑問題轉化為粒子群算法的優化模型。較好找到了植保無人飛機的近似最優路徑,進一步提高植保無人飛機噴藥作業工作效率。
2.2 柵格法
柵格法是將植保無人飛機的作業區域分成很多個具有二值信息的大小相同或不同的單元格。近年來廣泛采用Elfes和Moravec[23]等提出的柵格法,可飛和不可飛單元格是根據其中是否存在障礙物劃分。如圖5所示,障礙物輪廓用虛線表示,黃色柵格區域為不可飛單元格,與之對應的白色柵格區域為可飛單元格。全覆蓋航線規劃目前使用最為廣泛的是柵格法。

圖5 柵格法原理示意圖
當使用“在線式”航線規劃方法時,單元格劃分越大,則精度越低,此時非障礙區域將會被標記成障礙區域。而單元格越小,則精度越高,此時會增大計算量,增加成本。王宇等[24]提出了基于柵格法和引力搜索算法結合的路徑規劃方法,以最小化非植保工作時間為目的,計算合理的回歸點個數和位置。徐利鋒等[25]基于柵格法對目標區域進行路徑點采樣,針對含有障礙物的目標區域,提出了混合粒子群無人機航線算法。該算法的路徑點由柵格法來獲取,其次路徑點的排序由混合粒子群算法來完成,得出一條能夠規避障礙物,且對目標區域全覆蓋的航線。試驗結果表明:所提出的混合粒子群算法,能夠應用在含多個障礙物的目標區域,使得航線的轉彎次數減少,飛行時的能耗降低。
2.3 梯形分解法
梯形分解法是由Latombe等[26]提出,假設出一條與覆蓋方向一致的“割線”,在目標區域內沿著垂直方向進行掃描,目標區域內部的不規則障礙物與“割線”分別呈相離、相切或相交狀態,依靠不同的狀態,可以將目標區域中的非障礙部分劃分成多個子區域,且每個子區域的形狀都是梯形。如圖6(a)所示,有一塊多邊形障礙物處于目標區域中,可以采用梯形分解法對區域進行分解。

(a)含障礙物的工作區域
傳統梯形分解法使用傾斜角為0或π/2的一條水平或垂直“割線”對目標區域進行分割,其“割線”方向是不變的。因此,Huang提出了“割線”方向可變的“線掃分割法(Line-sweep-based Decompositions)”[27],“線掃分割法”是一個動態比對的過程,其“割線”在傾斜角為0~π的范圍內進行旋轉。梯形分解法常應用在作業目標區域內含有障礙物的情形,如圖6(b)所示,把目標區域分割成5個子區域,又可以用牛耕往復法或者柵格法等來完成每個子區域的施藥任務,當完成其中一個子區域施藥工作后,無人飛機自動選擇最佳的連接航線,進入下一個子區域進行施藥工作。
3 植保無人飛機旋翼下洗氣流
3.1 下洗氣流的特征
研究人員對農業植保無人飛機下洗氣流的分布特征進行了相關研究。為了全面獲取旋翼向下洗氣流的三維(3D)數據,將CFD技術與測試相結合,可以很好地捕捉空間中下洗氣流的詳細特征,并分析其現象的原因。
Yang等[28]通過重新規范組(RNG)k-ε湍流模型和動態網格技術,來研究懸停中的六旋翼農業植保無人飛機下洗氣流的分布特性。結果表明,相鄰的旋翼“入口”和“出口”區域氣流的流動使得下洗氣流的速度分布明顯不對稱。Yoon等[29]對懸停中的四旋翼植保無人飛機的下洗氣流風場進行了數值模擬和試驗驗證,試驗結果表明,兩個相鄰旋翼之間的干擾氣流將影響試驗測試數據的準確性。Zheng等[30]對一個六旋翼植保無人飛機在不同高度的下洗氣流進行了數值模擬分析,該氣流結合了滑動網格技術。結果表明,懸停高度就越大,下洗氣流場分布越均勻,地面效應越小。張豪等[31]基于多孔模型,建立了基于六旋翼植物保護植保無人飛機下洗氣流的3D CFD模型。研究結果表明,下洗氣流的聚集將使下洗氣流的速度分布更加均勻,提高氣流的流速。王昌陵等[32]通過在單向線陣列中設置三個方向傳感器,測量在稻田工作的油動力單旋翼植保無人飛機的機場。結果表明,最快氣流在飛行方向平行發生,其次是飛行方向和垂直方向的氣流速度,下洗氣流的寬度隨著飛行高度的降低而增加。植保無人飛機旋翼提供飛行升力的同時具有下洗氣流場,這是旋翼無人飛機大田低空作業的典型特征,如圖7所示。

圖7 旋翼無人機氣流作業特征
為了有效測量下洗氣流的流向特征,研究人員設計了風場的可視化試驗。根據氣流可視化技術,Mylapore等[33]使用視覺材料標記技術直接觀察了旋翼無人機機身的流線化和地面下沖洗氣流的流線型分布。根據機器視覺,Pombeiro等[34]研究了多旋翼植保無人飛機水面下洗氣流引起的波紋特性。雖然下洗氣流的漩渦結構復雜,但流場的可視化可以有效地觀察下洗氣流的特征。
3.2 下洗氣流對霧滴的影響
以往固定翼飛機噴灑農藥大多依靠霧滴的自然沉降達到靶標區域[35]。如今旋翼無人飛機施藥時,其產生的下洗氣流對霧滴在空間中的運動規律有著絕對性的影響[36],體現在能挾持霧滴輸運,提高霧滴對靶標的穿透性和均勻性;對農作物的冠層有擾動作用,改變霧滴最終在農作物上的位置。
已有研究表明,旋翼下洗氣流是影響霧滴運動的關鍵因素。Wang等[37]為探索了下洗氣流與作物樹冠相互作用的機制,在水稻頂上布置了一系列風速傳感器,獲得了水稻不同高度的氣流速度。結果表明,水稻高度越低,下洗氣流速度的衰減速率就越大。王昌陵等[38]為探究植保無人飛機旋翼下洗氣流場對噴霧效果的影響,測試了不同飛行速度下旋翼下洗氣流分布特性與霧滴沉積分布特性。試驗結果表明,隨著飛行速度的提高,冠層位置X、Y、Z三個方向的下洗氣流強度總體表現為由強到弱、由集中到分散的分布狀態;下洗氣流與外界空氣相互作用產生的卷揚氣流形成X方向氣流,對霧滴產生逆飛行方向的作用;下洗卷揚氣流和地面效應相互作用產生Y方向氣流,使霧滴朝向兩側垂直于航線分布;下洗氣流豎直向下的分量為Z方向氣流,具有促進霧滴沉積作用;在飛行速度為1.0 m/s 和3.0 m/s時,霧滴沉積量與下洗氣流場風速呈現出正相關關系,即與地面方向垂直的下洗氣流場越強,則霧滴沉積量越多;當速度到6.0 m/s時,下洗氣流場風速降低,使得氣流場對霧滴沉積的促進作用逐漸消失。因此植保無人飛機作業時飛行速度不應設置超過6.0 m/s,避免因下洗氣流場作用減弱而導致霧滴損失。陳盛德等[39]為了研究噴施霧滴在水稻植株的沉積分布規律,研究了2種不同型號無人機、不同作業參數對水稻冠層霧滴沉積分布結果的影響。結果顯示,隨著飛行高度和速度的增加,霧滴沉積量逐漸下降,且霧滴在空間的運動規律會受外界風場的影響。樊佳榮[40]為探究不同工況下的下洗氣流聚合效應對噴霧霧滴沉積規律的影響。統計了采樣面高度在 0 m、0.3 m和0.6 m上的霧滴沉積質量。試驗結果表面,隨采樣面高度的升高,越靠近無人飛機的旋翼,旋翼下洗氣流的風速越大,對霧滴產生的向下挾持作用越強烈,能夠促進霧滴的沉積,提高霧滴的抗漂移能力,導致0.3~0.6 m采樣面上的霧滴漂移損失率遠小于0~0.3 m。秦維彩等[41]為探究無人飛機噴灑參數對霧滴在油菜不同冠層的覆蓋率,使用Deposit Scan圖像處理軟件,計算霧滴在油菜不同冠層的分布情況。試驗結果表明:霧滴在油菜冠層上的覆蓋率受噴灑高度的影響比較明顯,當高度為1.5 m,速度為4 m/s時,在油菜下層的霧滴覆蓋率最大,占上層的53.7%;當高度為2.0 m,速度為4 m/s時,油菜上層的霧滴覆蓋率最大,霧滴沉積分布最均勻,變異系數為40.21%。
除實際作業測試外,Wang等[42]在實驗室測量了x、y、z方向下沖氣流的速度,利用了液滴空間質量的平衡分布規律,證明下洗氣流對液滴的行為有重大影響:垂直于地面方向的下氣流可以改善水滴的沉積。Tang等[43]在實驗室中利用高速粒子圖像測速法探索了旋翼轉速、旋翼與噴頭之間相對位置對霧滴運動行為的影響,證實了下洗氣流對霧滴沉積量和分布均勻性的影響作用。楊東輝[44]為了探究上揚的側向氣流流動對噴霧場的影響,搭建室內多功能植保噴霧施藥平臺,設定了四組參數(0.5 m,0 m/s),(1 m,0 m/s),(1 m,1.2 m/s),(1.5 m,1.2 m/s),得到了四組沉積效果圖。分析高度為1 m和0.5 m的軌跡分布圖,高度在0.5 m處的下氣流場更加紊亂,使得霧滴破碎形成更多顆粒,顆粒分布更加密集。此外流場的側向流在高度0.5 m處非常嚴重,使得顆粒受側向流流動而產生漂移,呈現出十字型擴散,并且顆粒回卷現象發生在邊界處。而在高度1 m處近似于菱形擴散;分析高度1 m處有無來流情況的分布圖,顆粒分布在x軸的正方向比負方向更容易受到來流作用而漂移的更遠。由于下洗氣流場對來流有很強的抵制作用,使得顆粒在噴頭的下方沒有發生明顯偏移的現象。此外x軸負方向渦流的產生,使得顆粒發生回卷現象;分析高度1 m 和1.5 m的顆粒分布場,隨著高度提升,旋翼下流場強度分布層次豐富,使得一些揚起的霧滴漂移現象發生在高度1.5 m處的左側。無人飛機旋翼下流場呈聚合、收縮以及下壓的姿態,對霧滴的沉降是十分有利的。楊風波等[45]為探究風場分布不明晰導致的霧滴分布不均問題,引入霧滴離散相,修正了連續相的動量、能量方程,結合雷諾平均N-S方程及Realizablek-ε湍流模型,建立了下洗氣流三維數學模型。試驗結果表明,霧滴主要分布在“旋翼間干擾”明顯的3個“引入區”和“導出區”,霧滴群交織分布在下洗區內側。由于旋翼的高速旋轉,霧滴除了受下洗氣流向下作用,還到旋翼旋轉方向的周向力的作用,因此霧滴除了有水平和豎直方向的運動,還有繞下洗區中心的旋轉運動。此外下洗核心區氣流速度大,所以該區壓力比大氣壓小,從而大氣對該區有壓縮的外力,且隨著下洗區向下發展,風速逐步減小,下洗區和外圍壓差減小,下洗區呈現出“喇叭狀”的變化,這種氣流變化使霧滴群在橫向位移達到最大值后出現反向水平運動。
旋翼下洗氣流是影響霧滴運動分布的關鍵因素。1970年美國農業部林業局的Dumbauld和軍方研發了一款用于固定翼飛機施藥的FSCBG沉積預測模型,此模型對復雜氣流的沉積預測效果不太理想[46]。因此,美國農業部林業局、美國宇航局和美國軍方合作研發出AGDISP模型,其目的是應用在林業、農業等航空噴灑的沉積計算[47]。從霧滴分布和旋翼氣流特征來看無人飛機作業系統,其像一個“會飛的”風送式噴霧系統。除了機體位置、施藥量、施藥角度等參數不同外[48],最大差別在于旋翼對空氣的反作用力作為該系統的風送氣流。由此可借鑒風送式噴霧系統的研究成果,進一步研究植保無人飛機施藥時各個飛行參數與霧滴運動規律的關系,也是未來施藥作業的重要研究方向。
4 田間植保技術
4.1 航空植保技術
早在1911年,為了解決森林病蟲害問題,德國人開始使用飛機噴灑農藥。目前美國是具有比較完善的航空植保技術標準體系,為了解決航空植保施藥中植保無人飛機的飛行、施藥作業等問題,美國聯邦航空局頒布了《聯邦航空規章》,此外《農業航空噴灑設備校準和分布模式測試》包含了主要的技術標準。以往我國的植保無人飛機多采用固定翼,飛機的起飛和著陸必須使用跑道。此類飛機的飛行速度快、作業效率高,但霧滴漂移較多,從而使得農藥浪費和污染環境。而無人直升機具有農藥用量少、防治效率高、智能化程度高、可以撒播植物種子等諸多優點[49]。使得植保無人飛機廣泛應用在水稻、小麥、棉花、油菜、玉米、果樹等農作物的蟲害防治中。
4.2 植保無人飛機在大田的應用
水稻是我國三大糧食作物中種植面積最大的作物。薛新宇等[50]為了闡明N-3型植保無人飛機對稻飛虱和稻縱卷葉螟的防治效果及應用前景,通過篩選N-3型無人直升機施藥參數。結果發現無人直升機在3m高度下施藥的效果最好,防治效果優于傳統的擔架式噴霧機。目前植保無人飛機防治水稻病蟲害主要以常規農藥為主,用納米水性農藥防治水稻病蟲害報道較少。因此,李燕芳等[51]進行植保無人飛機噴施30%苯甲·丙環唑微乳劑防治水稻紋枯病、稻瘟病和稻曲病的試驗,及探究對水稻生長的影響。試驗結果表明,植保無人飛機噴施30%苯甲·丙環唑微乳劑對水稻紋枯病病株、稻瘟病病穗、稻曲病病穗與人工施藥的防治效果相比,差異不大。但該施藥方式對水稻中后期主要病害防治效果均優于對照藥劑和人工施藥的防治效果。
張宋超等[52]為保證植保無人飛機在麥田高效作業,將植保無人飛機的飛行速度和高度設置成三個不同水平。研究結果表明,在飛行速度3.0 m/s,飛行高度2.0 m,噴灑流量2.0 L/min組合下有效幅寬達到最大值為5.78 m,在飛行速度3.0 m/s,飛行高度1.5 m,噴灑流量2.0 L/min組合下霧滴最大穿透率63.8%。實現了蚜蟲90%以上、白粉病80%以上和赤霉病88%以上的防治效果。
蒙艷華等[53]為研究棉花收獲前植保無人飛機噴施脫葉催熟劑的效果,對4種棉花品種噴施脫葉催熟劑。試驗結果表明,植保無人飛機施藥后霧滴在4種棉花上的沉積分布均呈現出上部霧滴覆蓋率顯著高于中部和下部冠層的霧滴覆蓋率,中部和下部霧滴覆蓋率無顯著性差異的特點。使用植保無人飛機對不同棉花品種噴施脫葉催熟劑,可以滿足采棉對脫葉率和吐絮率的要求,且不會對棉花纖維品質和產量構成因子造成不良影響。
張宋超等[54]為探索油菜田雜草看麥娘的有效防治,使用Deposit Scan軟件對霧滴沉積覆蓋率和沉積密度分析。結果表明在其他條件相同時,與人工施藥對比,小霧滴粒徑能夠增加植保無人飛機噴灑的覆蓋率和沉積密度。植保無人飛機防治油菜田雜草看麥娘,在條件允許情況下,采用大流量、小霧滴作業噴灑,可提高防治效果。
趙冰梅等[55]為探究玉米灌漿期三點斑葉蟬的防治效果,對農藥霧滴在玉米冠層的沉積分布及對三點斑葉蟬防治效果進行了研究。結果表明:旋翼產生的下洗氣流使霧滴具有穿透性,且玉米冠層不同部位和葉片正反兩面均可著藥。隨著高度增加,玉米葉片感知到旋翼向下的氣流減弱;速度的增加,致使進入玉米冠層內的風量減少,使冠層頂部到下部的霧滴沉積密度明顯減少。
總體上可以看出,近年來植保無人飛機在施藥領域的研究取得了快速發展,但在稻田噴霧作業過程中,還存在失控、噴頭堵塞、重噴、漏噴、防治效果不穩定等問題。隨著無人飛機的飛控和避障等技術的不斷發展,植保無人飛機必將成為大田病蟲害防治的主要手段。
4.3 植保無人飛機在果樹的應用
在我國果樹栽培中,梨、桃、柑橘、蘋果等的栽培面積和產量均位于前列。目前在大田作物上植保無人飛機噴藥已經得到廣泛應用,也開始逐漸應用在果樹上,并且開始對一些果樹的施藥形成了參數。蒙艷華等[56]為了探明植保無人飛機噴霧霧滴在主干形果樹冠層中的沉積分布規律,分別針對主干形桃樹和梨樹設計了4種飛行速度的噴霧作業。結果表明,對于主干形桃樹和梨樹,飛行速度對于霧滴分布均勻性的影響較大,其中對桃樹霧滴分布均勻性影響最大。飛行速度為2 m/s時的霧滴沉積密度最大,此時霧滴在主干形桃樹和梨樹不同位置的沉積分布比較均勻。
韓鵬等[57]為明確航空噴霧在丘陵果園對柑橘的影響,研究了3類噴霧助劑對丘陵柑橘冠層及地面的沉積量分布規律。結果表明:在同一作業參數條件下,不同類型助劑對霧滴密度、覆蓋率、沉積量的影響均不同。在對山地丘陵柑橘園進行精準航空施藥時,在藥液中添加體積分數為1.0%的倍達通、1.0%的Y-20079或0.5%的806,均可有效提高丘陵柑橘冠層的施藥效果。
張盼等[58]研究了作業高度和噴頭類型對無人飛機在柑橘果園噴霧效果的影響。結果顯示,作業高度為1.0 m時的噴霧效果明顯優于2.0 m和0.5 m時的;采用壓力式噴頭噴霧,藥液在葉面的覆蓋率大于采用離心轉子噴頭噴霧,霧滴沉積密度則相反。
王明等[59]為明確助劑在農藥減施增效中的作用,對矮砧紡錘形栽培模式蘋果園果樹冠層噴霧的霧滴沉積分布及蘋果黃蚜Aphis spiraecola防治效果進行研究。通過測定添加助劑對溶液表面張力、接觸角、霧滴體積中徑和鋪展系數等溶液性質的影響,分析了植保無人飛機噴灑霧滴在矮化密植蘋果園冠層的沉積密度、沉積量以及對蘋果黃蚜防治效果的影響。結果表明,植保無人飛機低容量噴霧常規用量毒死蜱乳油時,在藥液中添加助劑后,溶液的表面張力降低;在蘋果葉片上的接觸角比蒸餾水的減小很多;霧滴體積中徑顯著增加;提高農藥在果樹上的沉積量及對蘋果黃蚜的防治效果。
目前,我國對山地果園噴霧的植保無人飛機還處在研究應用階段,對山地丘陵果園的識別不精準、飛行噴藥航線與設定航線存在連續和吻合性偏差。如何做到對山地丘陵果樹冠層更加精準噴霧,將成為未來植保無人飛機在山地丘陵果園施藥的重要方向,該探究可為航空噴霧技術的研發改進提供研究依據。
5 安全施藥技術規范
農藥是重要的農業生產工具,對農業有害生物的防治有著重要地位,同時農藥也是有毒危險品,因此對農藥使用有一定的技術要求。為了規范植保無人飛機安全施藥技術,中國農業機械化協會和中國農藥工業協會等針對植保無人飛機噴霧沉積測量、航路規劃、農藥使用等制定了一系列標準。標準的全面實施,將提高植保無人飛機施藥的安全性,可以淘汰一批不符合監管要求的植保無人飛機,使得未來植保無人飛機產品更便于政府部門的管理[60]。
5.1 靜電噴霧技術
傳統靜電噴霧技術在航空作業的基礎上發展成農業航空靜電噴霧技術,在噴頭與農作物靶標間形成靜電場[61],使其在高壓靜電的作用下,帶電藥液吸附作用于農作物靶標的正反面。中國在21世紀初對農業航空靜電噴霧技術開始研究,其標志是新疆通用航空有限責任公司引進一套航空靜電噴霧Z03K000B系統關鍵部件和噴嘴為開端[62]。在西方發達國家,農業航空靜電噴霧技術發展比較成熟。最早開展了農業航空靜電噴霧技術的研究是美國農業部農業研究服務署的Carlton等[63],在1966年研究出電動旋轉靜電噴頭。為探究雙極交替充電模式對航空靜電噴霧系統的霧化、充電和沉積特性,美國田納西大學的Kihm等[64]展開研究。此外,為探索霧滴經噴頭釋放后,周圍局部的相對濕度和飛機尾流對霧滴溫度的影響,Teske等[65]研究了航空靜電噴霧漂移與霧滴蒸發效應。中國可借鑒國外經驗,繼續對靜電噴霧參數相互影響機理、霧滴帶電與農作物表面相互交互作用等問題開展更深入的研究,把對霧滴帶電研究轉成對農業航空靜電噴霧技術系統的整體研究。
5.2 低空低量施藥技術
低量施藥技術是使用超細霧狀的方式噴灑,使得一層農藥膜在植物絨毛的表面形成,將農藥均勻地噴灑到莖葉背面和根部,大大增加了農藥與病菌和害蟲接觸的概率,解決過量施藥造成的環境污染問題。莊浪縣首次引進山東衛士植保機械有限公司生產的十八旋翼無人植保機和超低量施藥技術[66],解決了病蟲草害反復感染,防治效果差等問題。朱玉坤[67]為探明棉花在防治棉蚜Aphis gossypii的噴藥量、噴霧方式、藥劑特點三者與藥效之間的關系,研究了棉花上棉蚜防治的低容量施藥技術。為了明確了殺蟲劑對霧滴密度和棉蚜死亡率關系的影響,霧滴密度的測量由霧滴密度卡來完成。為了確定防治棉蚜的最佳噴霧方式和噴霧量,分析不同噴霧方式噴霧時藥液沉積分布規律。由南京農業機械化研究所等單位完成的863項目“水田超低空低量施藥技術研究與裝備創制”。使用高效低污染施藥技術、自動控制技術等高新技術的融合,研發了無人駕駛的超低空低量噴施技術及裝備。施藥作業提高了10倍以上的效率,35%以上的農藥有效利用率,20%以上的農藥節約量。
5.3 低漂移噴霧技術
農藥漂移是指在施藥過程中或結束后,在外界條件下影響下,農藥霧滴從靶標區漂移到非靶標區的運動,蒸發和隨風漂移都屬于農藥漂移,前者是由農藥的揮發性引起,而后者是由于細小霧滴被氣流挾帶到非靶標區引起。與發達國家相比,我國藥械和施藥技術都有較大的差距,在對農藥漂移的研究也比較少。曾愛軍[68]為了減少霧滴漂移,分析影響農藥霧滴漂移的各種因素。在對國外控制霧滴漂移技術的基礎上進行總結,提出采用導流罩蓋技術。對雙圓弧導流罩蓋的防飄機理和霧滴的運動及沉積,采用計算流體力學軟件進行了模擬分析與試驗。試驗結果表明,導流風幕的作用決定了雙圓弧導流罩蓋的防飄性能。出風口下方的流場受到較大的風幕作用的影響,增加了垂直向下的氣流分速度,使得霧滴在噴頭下方的靶標區域運動,增加了霧滴沉積率。在西方發達國家中,對藥械的升級和新產品的設計都考慮如何減少漂移。Bode和Butler認為霧化裝置產生的霧滴大小范圍決定了農藥霧滴的漂移、沉積和覆蓋,若沉積在靶標上是細小的霧滴,則能夠有很好的覆蓋和防治效果,但小霧滴容易隨風漂移。
6 存在問題
通過對國內外植保無人飛機施藥技術研究進展進行分析總結,發現我國植保無人飛機技術研究還存在以下幾個方面的不足。
1)飛控系統仍未成熟,運用在植保無人飛機上常規的PID算法、PID智能,很多是基于神經網絡的PID算法和部分回路中使用的模糊自適應PID算法。雖然加入植保領域的植保無人飛機企業是以百計數,但是真正擁有農業植保飛控研發能力的企業并不多。
2)航路規劃的是任務規劃系統當中一個重要環節,引導無人飛機怎樣選擇最佳的航路來完成任務。目前隨著植保無人飛機所執行任務的要求越來越高,以及作業區域各種因素的不確定性,對航路規劃的要求也將越來越高。此外航線規劃是復雜的優化問題,理論上沒有絕對的最優解,只能得到靠近最優解的解。
3)對旋翼植保無人飛機風場的研究主要集中在空間維度上,對無人飛機在時間維度的流動特征的科研成果很少報道。此外對旋翼無人飛機風場下霧滴運動規律研究不足。無人飛機旋翼數量和分布不同,產生的旋翼下洗氣流以及對霧滴在空間的分布規律也不同,可應用到改善霧滴沉降效果的基礎性理論不多。
4)植保無人飛機靜電施藥系統中電極荷電等核心技術理論研究不足,其中帶電材料在絕緣性能方面達不到要求,導致系統部件發生漏電現象。此外,靜電噴頭的荷電性能和霧化效果直接影響施藥效果,對靜電噴頭研究不足,在靜電噴頭產生的霧滴粒徑大小、霧滴載多少電荷量、霧滴漂移等問題并無統一的標準,嚴重制約了靜電施藥技術的推廣應用。
5)航天飛行器的法律法規有待完善,方便政府部門進行管理。植保無人飛機行業標準亟需進一步完善,促進其健康發展。植保無人飛機的硬件和軟件存在許多技術問題,需要花費大量時間來解決。需要越來越多從事該事業的人員共同探討植保無人飛機在市場的推廣和應用。
7 展望
為了促進植保無人飛機的健康發展,2018年中國農業機械化協會頒布了首部植保無人飛機行業標準——《植保無人飛機質量評價技術規范》(NY/T 3213—2018)[69]。如今我國植保機械標準已有82個,覆蓋范圍廣,其標準多與國際標準接軌。目前國內植保無人飛機施藥技術的研究仍處于螺旋式上升階段。從長遠發展的角度來看,隨著土地流轉、單位面積噴灑費用上升以及勞動力短缺等變化,植保無人飛機施藥技術有較大的發展空間,對于未來植保無人飛機施藥技術我們有以下幾點期待。
當以往傳統的單一飛行控制方案不能滿足植保無人飛機的性能需求時,復合控制方法將成為未來發展的趨勢。當使用一種規劃方法無法滿足航線規劃要求時,全局和局部搜索方法的結合將是一種趨勢,且處在不確定環境因素下的實時航路規劃將是未來的研究重點。
靜電噴霧技術、低空低量施藥技術和低漂移噴霧技術的關鍵在于建立霧滴漂移和分布模型,所以針對旋翼植保無人飛機施藥建立系統的霧滴漂移和分布模型是未來研究發展趨勢。因此,可以以四旋翼農業植保無人飛機為研究對象,結合可壓縮RANS方程、SST,研究處于懸停狀態的四旋翼農業植保無人飛機在空間和時間維度下下洗氣流的分布特征。
未來植保無人飛機施藥技術會由單一模式向多元化模式轉變,且減少農藥使用是未來的發展趨勢。按照農作物自身需求給出合適的藥量是減量的關鍵,這就要求需要精準監測,且快速處理病蟲草害的信息。因此,需要加強多機合作等方面研究。搭載監測平臺,獲取并處理病蟲草害信息,規劃植保無人飛機施藥航線,實現精準噴灑,完成施藥作業。
農業生產力的提高還在于航空植保技術,改善農業結構的調整,防止生態環境受到污染。對航空植保技術的扶植力度還需進一步的加強,讓航空植保技術能夠發揮出真正的力量,促進農業現代化的發展。
植保無人飛機產品的行業標準體系較為完善,但服務能力以及配套服務不足,有保障的后續服務亟需提高。民用無人飛機不夠貼近民生,還是要更接地氣。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33