稻田氣力施肥裝置設計與試驗*
2022-02-25 02:40:54胡辰方學良史揚杰
中國農機化學報 2022年1期
胡辰,方學良,史揚杰
(1.揚州工業職業技術學院交通工程學院,江蘇揚州,225127;2.揚州大學機械工程學院/江蘇省現代農機農藝融合技術工程中心,江蘇揚州,225009)
0 引言
中國是水稻種植面積與產量較高的國家之一。在水稻種植過程中,需要進行多次施肥作業,現階段的施肥方式主要以表層拋撒為主[1],其排肥過程一般依靠肥料自身重力向下流動來實現。排肥不均勻,且肥料顆粒落地位置難以控制,無法均勻分布于水稻根系附近,導致肥料利用率低下。在施肥作業過程中,機具行駛速度與施肥量的匹配問題非常關鍵,為保證施肥的均勻性和穩定性,排肥輪轉速應隨機具行駛速度的變化而變化[2]。傳統施肥機械一般采用地輪驅動排肥器轉軸以實現精量施肥[3],但地輪的轉動易受作業區域土壤黏度與平整度的影響,產生滑轉、空轉現象,導致施肥不均,降低了肥料利用率。因此,實現均勻施肥,提高肥料利用率,將是我國實現水稻增產的重要途徑。
目前,針對水稻施肥不均、肥料利用率低下的問題,國內外以精準施肥策略為作業基礎的各種施肥機械得以發展。如日本井關、洋馬、久保田等公司研發的采用轉盤式和帶槽滾筒式施肥結構的施肥機,國內采用排肥輪、螺旋桿和調節葉片等結構的施肥機。但此類機械式排肥機構在排肥作業時,大多存在脈動現象,施肥均勻性雖有所提高,但仍不能滿足精準施肥的需求,且施肥量的調節依賴于機械結構的配合,安裝精度要求較高,配件易磨損,對肥料也有一定的要求。而氣力施肥裝置的出現很好地解決了傳統機械式施肥機構的弊端,其結構簡單,排肥量的調節只需精準控制電機的轉速,肥料適應性高,因而得到了更多學者的青睞。
楊慶璐等[4]設計了一種氣力集排式變量排肥系統分層施肥量調節裝置,試驗結果表明,各出肥口出肥量變異系數均小于5.18%,分肥比例誤差小于2.68%,滿足施肥作業要求。Kim等[5]提出了氣動排肥方案,設計了一種氣力式施肥裝置并進行了試驗研究,結果表明:氣力式排肥方案可有效提高施肥均勻性;李慧等[6]設計了一種氣流式分層施肥系統,利用軟件對肥料混合器進行仿真分析和試驗驗證,并進行性能試驗,結果表明,該系統施肥量變異系數為1.61%,施肥深度一致性高。根據周藝[7]的研究,肥料深施可有效提高肥料利用率,減少徑流損失。
上述學者開展了多方面研究,但未有效解決排肥分布不均、作業效率低、勞動強度大等問題。經過分析,氣力式輸肥仍存在以上問題的原因為進料口存在空氣泄露,嚴重時會造成進料口肥料堆積現象。因此,在設計輸肥管結構時,進料口應保證無氣體外泄,本文基于文丘里效應設計了一種氣力施肥裝置,高速氣流在通過較窄管口時,進料口形成負壓,有效解決了氣體泄露的問題。且結合水稻種植農藝要求對關鍵部件和排肥控制系統進行設計,以期提高施肥作業效率和質量,為水稻施肥技術及裝備研究提供理論依據和參考。
1 總體結構及工作原理
1.1 總體結構
本氣力施肥裝置主要由鼓風機、送風管、料斗、排肥器、氣力施肥管及排肥口組成,如圖1所示。鼓風機安裝在料斗左右兩側。系統工作時,肥料從料斗經排肥器落入氣力施肥管,鼓風機將具有一定風速的氣體吹入氣力施肥管中,由于文丘里效應,因此氣流在肥料入口處加速,使得進料口呈負壓狀態[8],氣流只能從進氣口通向出氣口,期間與進肥口落入的肥料混合,肥料顆粒在氣流的作用下,經過氣力施肥機構,從排肥口落入水稻肥料槽內。

圖1 氣力施肥裝置總體結構
1.2 工作原理
氣力施肥原理如圖2所示。

圖2 氣力施肥原理圖
施肥作業時,風機與電控排肥器工作,肥料經電控排肥器落入氣—肥混合腔,風機產生的高速氣流經送風管進入氣—肥混合腔,由于文丘里效應,混合腔肥料入口呈負壓,氣流只能經空氣入口流向排肥口,高速氣流與肥料在混合腔內混合,肥料顆粒在氣流作用下經出氣口進入排肥管內,避免肥料顆粒在排肥管內部的沉積導致排肥管堵塞,同時適當的輸送氣流可以保證肥料顆粒以相近的間隔被排出混合腔,有利于提高施肥的精確性和均勻性。
2 關鍵部件設計
2.1 氣力施肥管結構設計與優化
顆粒肥在排肥管中的運動狀態主要受料氣混合濃度比與輸送氣速的影響,料氣混合濃度比μ為排肥管中顆粒肥質量流量與輸送氣流質量流量之比。料氣混合濃度比越大,則通過排肥管的氣流流量越小,系統輸送能力越大,但需要高壓設備,且料氣混合濃度比過大容易造成排肥管堵塞。鑒于本裝置實際工作條件與生產率要求,取μ=0.6。則根據郭曉冬[9]的空氣流量公式,本系統輸送氣流體積流量可通過方程組(1)求得。
(1)
式中:Gs——顆粒肥質量流量,即排肥系統生產效率,kg/h;
Gf——輸送氣流質量流量,kg/h;
Qf——空氣流量,m3/h;
ρf——空氣密度,kg/m3。
以機具作業行駛速度3 km/h,機具作業幅寬2.5 m,理論施肥量112.5~412.5 kg/hm2計算,系統生產效率W的范圍為84.375~309.375 kg/h。常溫下空氣密度ρf=1.2 kg/m3,計算得到Qf范圍為117.2~429.7 m3/h。在設計時取Qf上限429.7 m3/h。考慮到送風管安裝或制造原因可能存在漏風等因素,風機風量一般比系統輸送空氣流量大10%~20%,取上限的風機風量QF=1.2Qf=515.6 m3/h。據此選取SEAFLO SFBB1-320-02型風機,風量550 m3/h,保證氣力施肥管中的輸送風量。
輸送氣速是影響排肥性能重要因素,由于排肥管在空間結構上的彎曲,顆粒肥與排肥管壁存在摩擦、碰撞等動能損耗,過低的輸送氣速可能會造成肥料堆積現象,導致排肥管堵塞,而過高的輸送氣速一方面增加不必要的能耗,另一方面會加速管壁的磨損,同時也可能會造成顆粒肥的破裂,影響肥效[10]。輸送氣速的大小取決于肥料顆粒的臨界懸浮速度,本文采用左興健等[11]的輸送氣速確定方法,其計算如式(2)所示。
V=kVL
(2)
式中:V——輸送氣速,m/s;
k——速度系數;
VL——肥料顆粒臨界懸浮速度,m/s。
肥料顆粒臨界懸浮速度是氣力施肥裝置設計的關鍵參數,只有當輸送氣速大于肥料顆粒臨界懸浮速度時,肥料顆粒才會被氣流帶動。肥料顆粒大小不一且不是規則球體,因此,根據不規則形狀物料臨界懸浮速度計算見式(3)。
(3)
式中:Ф——形狀修正系數;
g——重力加速度,取9.8 m/s2;
C——黏性阻力系數;
ds——肥料顆粒當量球體直徑,cm;
ρs——肥料密度,kg/m3。
取Ф=1.2,C=0.44,ρf=1.2 kg/m3,實際測量得1.6 mm≤ds≤4 mm,ρs=1 485 kg/m3,代入式(3)得到VL范圍7~11 m/s。
速度系數k由料氣混合濃度比和輸送管路復雜程度決定,本系統屬于稀相氣力輸送系統,且管道復雜程度較低,故可取k=1.8。代入式(2)得到輸送氣速V范圍為13~20 m/s,設計時取上限V=20 m/s。
綜上所述,根據文丘里原理設計了氣力施肥管,包括空氣入口、肥料入口、排肥口與混合腔,如圖3所示。混合腔總長200 mm,空氣入口直徑為35 mm,排肥口直徑為30 mm,肥料入口直徑為25 mm,混合腔處管徑h范圍為10~20 mm。為了滿足出口流速要求,根據文丘里原理,采用齊興源等[12]的氣體流速公式,在流量不變情況下流速vf與管道橫截面積s呈反比,其計算式為
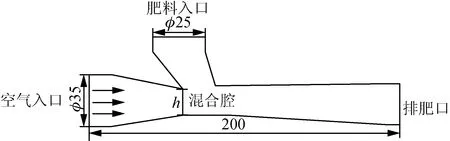
圖3 氣力施肥管結構
(4)
式中:QA——流量,m3/h;
s——管道橫截面積,m2。
由于管道截面積自兩端向中間逐漸變小,因此,由式(4)可知,氣流流速在混合腔處增大,一方面可使肥料入口處肥料顆粒獲得較大初速度,使肥料顆粒更易排出;另一方面可增大混合腔與肥料入口之間的壓力差,在肥料入口處形成負壓,使肥料顆粒更易進入混合腔,同時減少氣流回流損失。
為確定合理的混合腔管徑以及肥料入口角度,采用Fluent對氣—肥混合腔內流場進行仿真分析。第一步以混合腔處管徑h為變量,取h分別為10、15和20 mm,進肥口與進氣角度為銳角;第二步以進肥口與進氣角度為變量,角度分別為銳角、直角和鈍角,h為15 mm。氣體為標準空氣,選用k-ε模型,空氣入口風速設置為13 m/s(實際測量所得),分析混合腔處管徑h以及肥料入口角度對混合腔內氣流分布的影響。
由圖4可知,當混合腔處管徑h為10 mm時,肥料入口處風速達到4 m/s,相較于h為15 mm和20 mm 時肥料入口處風速更高,更有利于肥料顆粒進入混合腔;但肥料與氣流混合處高速氣流與低速氣流分布不均,高速氣流集中在混合腔下端,且排肥口處存在一定程度的紊流,無法保證肥料顆粒以相近的間隔被排出混合腔,降低施肥的精確性和均勻性,對排肥性能有一定影響。當混合腔處管徑h為20 mm時,肥料入口處風速為2 m/s,肥料與氣流混合處高速氣流占比相較于h為10 mm和15 mm時明顯增多,但高速氣流流速較慢,僅為17 m/s,未達到理論輸送氣速,可能會造成肥料顆粒在排肥口出現處堆積現象。
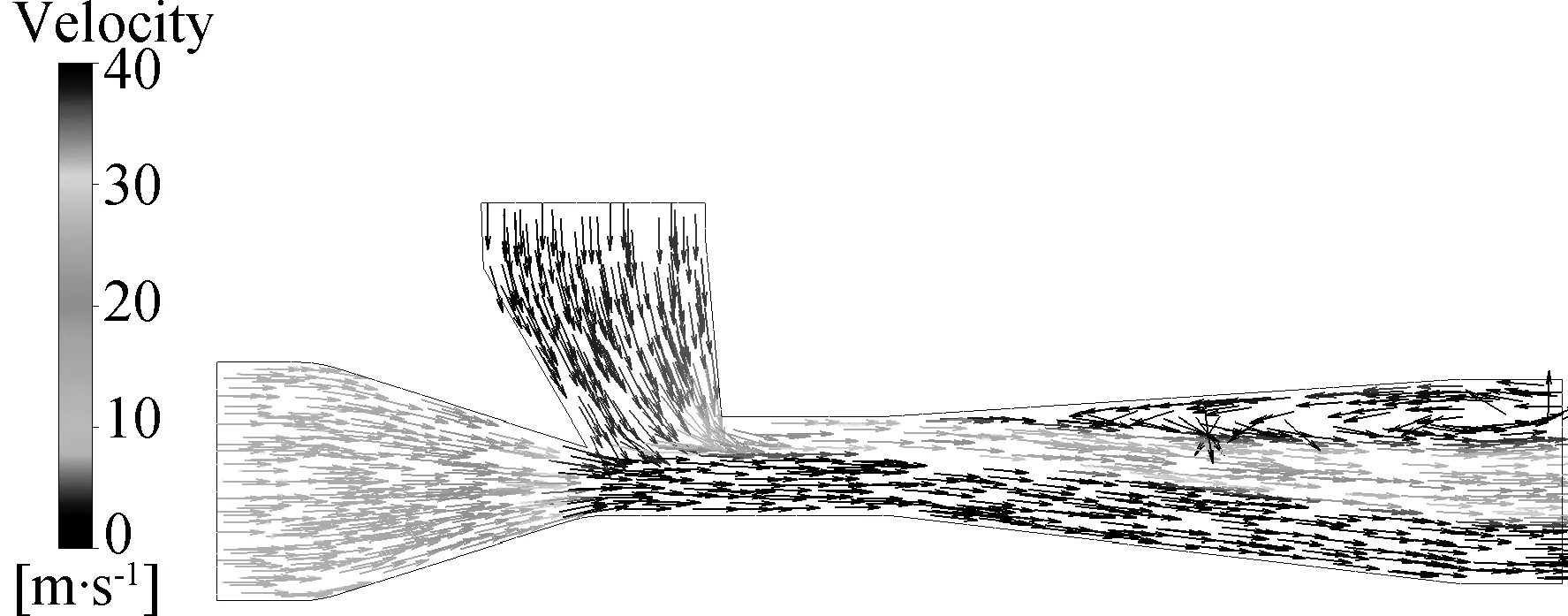
(a)h=10 mm
由圖5可知,當進肥口與進氣角度成直角或者鈍角時,在進肥口處存在紊流。當混合腔處管徑h為15 mm、進肥口與進氣角度成銳角時,肥料入口處風速為2.5 m/s,且肥料與氣流混合處氣流分布相對均勻,排肥口處無回流,使得肥料被排出混合腔的間隔更加均勻,且高速氣流流速達26 m/s,達到理論輸送氣速。因此,確定混合腔處管徑為h=15 mm,有利于肥料顆粒進入混合腔和排肥。

(a)直角
2.2 排肥控制系統設計
為保證施肥的均勻性和穩定性,本文設計了一種精量排肥控制系統,如圖6所示。

圖6 精量排肥控制系統原理
采用嵌入式控制系統,主要功能包括RTK-GNSS測速模塊、監控終端、施肥控制器、排肥電機驅動模塊、排肥電機以及旋轉編碼器。拖拉機配備NX200農機導航自動駕駛系統,利用其自帶的RTK-GNSS導航測速模塊采集拖拉機行進速度,并將速度脈沖信號反饋給施肥控制器。
變量施肥控制器接收排肥電機轉速脈沖信號與速度脈沖信號,并通過PID控制算法改變PWM脈沖占空比實現電機轉速實時控制,從而達到精量排肥目的。為了實現最優控制,有必要調整PID控制器參數,經過反復試驗和整定,得出PID控制規律為
(5)
式中:U(t)——PID控制器的輸出;
err(t)——目標速度與實際速度之間的偏差。
當確定施肥量后,電機轉速需滿足以下關系
(6)
聯立求得電機目標轉速為
(7)
式中:S(t)——t時刻對應作業面積,hm2;
M0(t)——t時刻對應目標施肥量,kg/hm2;
N0(t)——t時刻驅動電機目標轉速,r/min;
VG(t)——t時刻采集的拖拉機行駛速度,km/h;
b——作業幅寬,m;
M0——單位面積目標施肥量,kg/hm2;
n——排肥器數量,個;
q——排肥槽輪單轉排量,kg/r。
排肥電機驅動模塊驅動排肥電機將肥箱料斗中的肥料輸出;反饋編碼器實時采集排肥電機的轉速,并將電機轉速脈沖信號反饋給施肥控制器,實現排肥電機的閉環控制;用戶可以通過監控終端查看系統實時狀態,并即時改變施肥參數,從而實現人機交互工作。
3 田間試驗
3.1 試驗條件
參照GB/T 20346.1—2006《施肥機械試驗方法第1部分:全幅寬施肥機》[13]標準要求,于2020年4月20日在揚州市江都區邵伯鎮金運種業有限公司進行田間試驗,對該氣力施肥裝置進行施肥穩定性與精確性試驗,同時考慮排肥管長度對排肥滯后時間的影響。根據水稻不同時期生長所需肥料類型與營養量的不同,施肥量應能夠在112.5~412.5 kg/hm2之間調節,因此,結合式(6),本裝置選用外槽輪排肥器,理論單轉排肥量為20 g,由此得出電機轉速變化范圍應為10~30 r/min。試驗選用肥料為尿素,粒度范圍0.85~2.8 mm,試驗區域內水稻行距25 cm。
3.2 試驗方法
3.2.1 氣力施肥裝置施肥穩定性試驗
在不同電機轉速下對各行排肥量一致性進行測定。試驗時,設置3種驅動電機轉速:10、20、30 r/min,測定行數為8行,測試時間5 min,用8個料桶在對應排肥管下對肥料進行收集,結束后進行稱量并記錄,每個轉速下重復3次試驗取均值。其中各行排肥量一致性由變異系數體現,并按式(8)計算各行排肥量一致性的均值和變異系數。
(8)
式中:xi——每行各次平均排肥量,g;
X——每行各次平均排量的平均值,g;
Sb——各行排量一致性的標準差,g;
CV——各行排量一致性的變異系數,%。
3.2.2 施肥量精確性試驗
試驗時設定行駛速度為4 km/h,目標施肥量設定為150 kg/hm2,將試驗地塊劃分出10個2.5 m×100 m的區域,通過稱量試驗前后肥箱內肥料總質量計算得到區域內實際施肥量,并計算施肥量偏差。
(9)
式中:γs——施肥量偏差,%;
WQ——試驗前肥箱內化肥質量,kg;
Wh——試驗后肥箱內剩余的化肥質量,kg;
Sm——施肥作業面積,m2;
F——預置施肥量,kg/hm2。
3.2.3 排肥管長度對排肥滯后時間的影響
在排肥過程中,肥料在排肥管中的滯后時間對排肥的均勻性具有顯著影響,因此,本文針對排肥管長度與排肥滯后時間的關系進行了相關試驗。試驗中,將不同長度的排肥管入口與出口保持在同一水平面,當肥料經過排肥驅動電機進入氣力施肥裝置時,開始計時,當肥料從排肥口排出時結束計時。
3.3 試驗結果與分析
由表1可知,電機轉速在10~30 r/min內變化時,各行平均排肥量變異系數均較小,當電機轉速為10 r/min時,最大變異系數為2.21%,各行排肥一致性較好,排肥量比較恒定;隨著電機轉速升高,各行平均排肥量基本呈線性增加,且各行平均排肥量變異系數有減小的趨勢,施肥穩定性增加。

表1 各行排肥量一致性測定統計結果
由表2可知,在目標施肥量設定為150 kg/hm2,機具作業速度為4 km/h時,裝置總施肥量偏差范圍為0.40%~7.47%,總體施肥均勻性較好,施肥精確性高。

表2 田間施肥統計結果
由表3可知,肥料在排肥管中的滯后時間與排肥管長度呈正相關,1~4 m排肥管長度對應排肥滯后時間變化范圍為0.67~1.81 s,排肥管的長短對排肥滯后時間有顯著影響。

表3 排肥管長度對排肥滯后時間的影響
為實現對排肥變量控制參數進行修正,對排肥管長度與排肥滯后時間進行線性擬合,擬合方程為
Δt1=0.38l+0.335
(10)
式中:Δt1——排肥滯后時間,s;
l——排肥管長度,m。
因此,為保證排肥過程不出現嚴重漏施肥現象,應避免排肥管在空間上的彎曲,縮短排肥管長度以提高施肥均勻性。
4 結論
1)針對排肥分布不均、作業效率低、勞動強度大等問題,本文基于文丘里效應,設計了一種氣力施肥裝置,并采用Fluent對混合腔內流場進行了仿真分析,結果表明,當混合腔管徑h=15 mm且肥料入口與進風口呈銳角時,肥料入口處風速為2.5 m/s,肥料與氣流混合處氣流分布相對均勻,排肥口處無回流,高速氣流流速達26 m/s,達到理論輸送氣速要求,更易實現肥料的輸送。
2)田間作業試驗表明,不同電機轉速下,各行排肥量變異系數變化范圍為1.68%~2.21%,各行排肥量一致性較好,施肥穩定性好。在目標施肥量為150 kg/hm2,作業速度4 km/h時,該裝置施肥總體比較穩定,各區域內施肥量偏差控制在7.47%以內,施肥精確性好。
3)排肥管的長度及出口高差對肥料滯后具有顯著影響,擬合得到了排肥管長度與排肥滯后時間線性方程便于后續進行排肥變量控制參數進行修正。