分布式電傳飛控系統(tǒng)穩(wěn)定儲(chǔ)備試驗(yàn)
2022-02-25 14:55:05屈宗源
科技信息·學(xué)術(shù)版 2022年8期
穩(wěn)定性是控制系統(tǒng)的基本要求,是指在去掉作用于系統(tǒng)的干擾后,它能夠以足夠的精度恢復(fù)到初始平衡狀態(tài)的能力。穩(wěn)定性的定義反映了對(duì)控制系統(tǒng)的三個(gè)要求:一是必須能恢復(fù),二是能快速恢復(fù),三是回復(fù)狀態(tài)與初始狀態(tài)有高度的一致性。在飛控系統(tǒng)中的優(yōu)異的穩(wěn)定性是良好飛行品質(zhì)的必要條件。在飛控系統(tǒng)設(shè)計(jì)中,通常通過增益裕度和相位裕度來(lái)表征飛控系統(tǒng)的穩(wěn)定性。
建模與仿真技術(shù)的發(fā)展,為通過數(shù)字仿真來(lái)研究和評(píng)估飛控系統(tǒng)穩(wěn)定性創(chuàng)造了很好的條件,也為此做出了很大的貢獻(xiàn)。但是,由于仿真計(jì)算增益和相位裕量需要考慮的因素眾多,諸如:制造公差,穩(wěn)定的和不穩(wěn)定的氣動(dòng)影響和結(jié)構(gòu)模態(tài),計(jì)算通道中的模擬或數(shù)字的輸入和輸出濾波器造成的相位滯后,采樣速率和綜合技術(shù),熱效應(yīng),降級(jí)構(gòu)型,部分液壓失效。且飛機(jī)系統(tǒng)機(jī)載設(shè)備多,結(jié)構(gòu)復(fù)雜,尤其像液壓伺服舵機(jī)及其液壓能源,很難建立精準(zhǔn)的數(shù)學(xué)模型,也很難實(shí)現(xiàn)復(fù)雜模型下的實(shí)時(shí)仿真。因此,在飛機(jī)驗(yàn)證階段需要通過試驗(yàn)來(lái)進(jìn)行驗(yàn)證系統(tǒng)的穩(wěn)定性滿足設(shè)計(jì)要求,通過“穩(wěn)定儲(chǔ)備試驗(yàn)”來(lái)驗(yàn)證和評(píng)估飛控系統(tǒng)穩(wěn)定儲(chǔ)備也顯得尤為重要。
某型飛機(jī)飛控系統(tǒng)采用分部式架構(gòu),系統(tǒng)以多余度飛行控制模塊(FCM)、作動(dòng)器控制電子(ACE)、遠(yuǎn)程電子單元(REU)為核心處理部件構(gòu)建的數(shù)字式電傳飛行控制系統(tǒng),向飛機(jī)飛行提供正常控制功能;同時(shí)了防止ACE的共模故障,系統(tǒng)還配備了使用模擬控制電路的輔助飛行控制單元(AFCU)提供備份控制,該設(shè)備可以在4臺(tái)ACE同時(shí)失效時(shí)保證對(duì)主操縱面(副翼、方向舵、升降舵)的控制,實(shí)現(xiàn)飛機(jī)的安全飛行和著陸。
系統(tǒng)共有四個(gè)工作模式,其中正常工作模式和降級(jí)工作模式的控制律由FCM生成,通過數(shù)字總線將控制指令經(jīng)由各ACE轉(zhuǎn)發(fā)到對(duì)應(yīng)的REU,由REU控制作動(dòng)器執(zhí)行指令;正常工作模式是系統(tǒng)默認(rèn)的工作模式,正常模式控制律可實(shí)現(xiàn)控制增穩(wěn)、縱向自動(dòng)配平、邊界保護(hù)、姿態(tài)保持等功能。在外部信號(hào)缺失或系統(tǒng)內(nèi)設(shè)備故障時(shí),系統(tǒng)進(jìn)入降級(jí)工作模式,在該模式下系統(tǒng)結(jié)合直接角速率傳感器(DMRS)提供的角速率信號(hào)生成控制增穩(wěn)的降級(jí)模式控制律。直接工作模式的隨襟翼狀態(tài)調(diào)參的比例控制律由各ACE生成,通過數(shù)字總線將控制指令發(fā)送到對(duì)應(yīng)的REU,由REU控制作動(dòng)器執(zhí)行指令;備份控制功能的比例控制律由AFCU生成,通過模擬信號(hào)將控制指令傳遞到對(duì)應(yīng)的REU,由REU控制作動(dòng)器執(zhí)行指令。直接模式和備份控制模式的控制律均為開環(huán)的比例控制。基于飛控系統(tǒng)的功能及狀態(tài),系統(tǒng)的閉環(huán)穩(wěn)定性驗(yàn)證試驗(yàn)只需覆蓋飛控系統(tǒng)正常工作模式和降級(jí)工作模式,系統(tǒng)的直接模式和備份控制模式只需進(jìn)行開環(huán)動(dòng)態(tài)性能測(cè)試即可。
在以往的電傳飛控系統(tǒng)的穩(wěn)定性測(cè)試中,多采用斷開系統(tǒng)測(cè)量系統(tǒng)的開環(huán)頻率響應(yīng),得到系統(tǒng)的開環(huán)傳遞函數(shù)的方法。但因?yàn)楸撅w控系統(tǒng)縱向通道具備有自動(dòng)配平的功能,如采取開環(huán)的方式進(jìn)行穩(wěn)定性的測(cè)試,會(huì)因?yàn)榉e分器的漂移導(dǎo)致測(cè)量的數(shù)據(jù)難以分析。在系統(tǒng)研制初期,在桌面仿真中通常可以通過斷開積分器,將系統(tǒng)斷開,測(cè)量系統(tǒng)的開環(huán)傳遞函數(shù)。但是在系統(tǒng)集成階段,斷開積分器過于復(fù)雜且沒有必要。所以對(duì)于本系統(tǒng)采用閉環(huán)疊加干擾信號(hào)的方式來(lái)進(jìn)行穩(wěn)定儲(chǔ)備的測(cè)試。
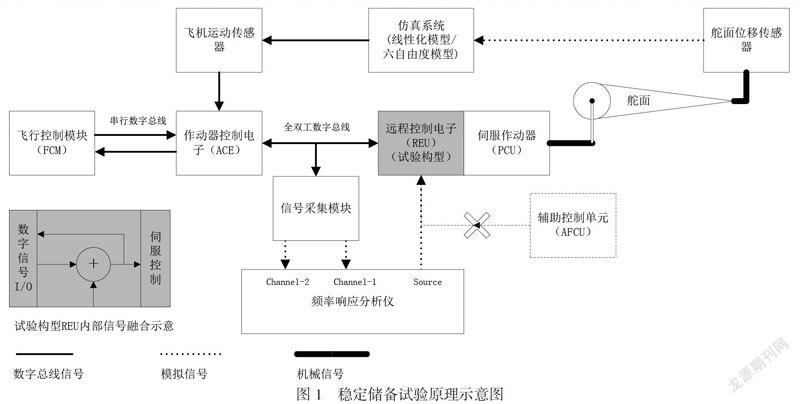
在進(jìn)行系統(tǒng)穩(wěn)定儲(chǔ)備時(shí),系統(tǒng)外部通過飛控系統(tǒng)控制面上的舵面位移傳感器,將舵面的運(yùn)動(dòng)狀態(tài)輸入到飛行仿真系統(tǒng),飛行仿真系統(tǒng)運(yùn)行飛機(jī)的六自由度運(yùn)動(dòng)模型或小擾動(dòng)線性化運(yùn)動(dòng)模型,解算出飛機(jī)的姿態(tài)角、三軸角速率、加速度等參數(shù),再通過物理效應(yīng)器驅(qū)動(dòng)飛機(jī)運(yùn)動(dòng)傳感器產(chǎn)生信號(hào)(或直接將信號(hào)注入飛控系統(tǒng))注入飛控系統(tǒng),達(dá)到系統(tǒng)與飛機(jī)閉環(huán)。在飛行仿真系統(tǒng)設(shè)置不同的飛機(jī)構(gòu)型及飛行狀態(tài),并將飛機(jī)配平在設(shè)定的飛行狀態(tài)下。用動(dòng)態(tài)頻響分析儀產(chǎn)生正弦掃頻信號(hào)注入飛控系統(tǒng)。通過將REU中的可編程邏輯替換為“試驗(yàn)構(gòu)型”狀態(tài),使正常系統(tǒng)閉環(huán)內(nèi)的指令信號(hào)與經(jīng)由AFCU口輸入的外部掃頻信號(hào)進(jìn)行融合,達(dá)到在系統(tǒng)注入擾動(dòng)的目的。融合后的信號(hào)會(huì)通過“控制反饋信號(hào)”經(jīng)由雙工數(shù)字總線回傳到系統(tǒng)。由于系統(tǒng)采用分部式架構(gòu),相較于傳統(tǒng)飛控系統(tǒng),可以很方便的將ACE與REU之間的數(shù)字信號(hào)進(jìn)行解析,得到系統(tǒng)下發(fā)給REU的控制信號(hào)及REU的控制反饋信號(hào)。通過總線信號(hào)采集模塊將“控制信號(hào)”和“控制反饋信號(hào)”采集,并通過數(shù)/模轉(zhuǎn)換為模擬信號(hào)分別接入頻響分析儀的兩個(gè)分析通道。如圖1所示。
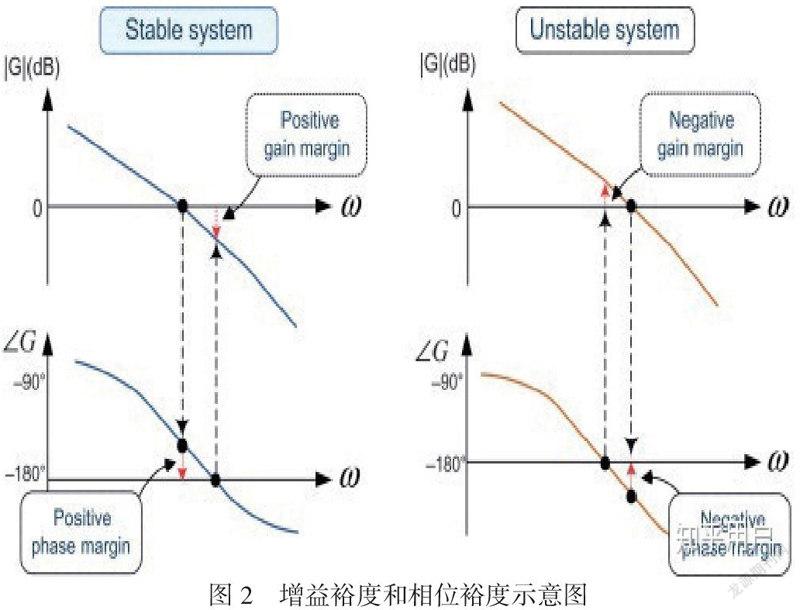
通過頻響分析儀繪制出“控制信號(hào)”相對(duì)于“控制反饋信號(hào)”的Bode圖。找出幅頻曲線達(dá)到0dB點(diǎn)及相頻曲線達(dá)到180°的點(diǎn)。幅頻曲線達(dá)到0dB的頻率在相頻曲線上對(duì)應(yīng)的點(diǎn)距-180°的距離即為相位裕度,相頻曲線達(dá)到180°的頻率在幅頻上對(duì)應(yīng)的點(diǎn)距0dB的距離即為增益裕度,如圖2所示。
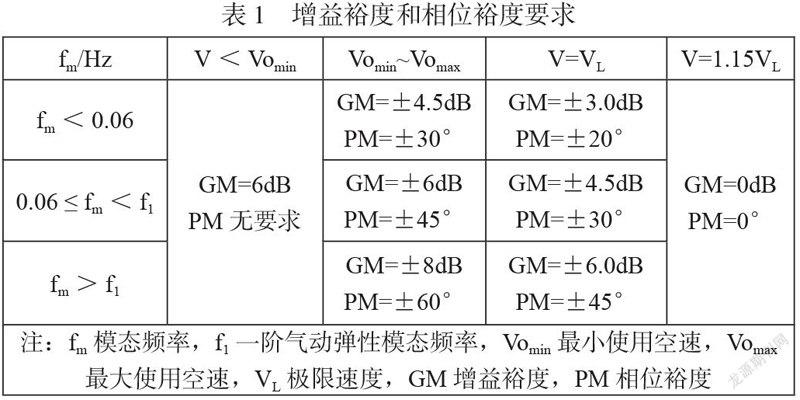
按照國(guó)內(nèi)外相關(guān)標(biāo)準(zhǔn),系統(tǒng)的增益裕度和相位裕度應(yīng)滿足表1。
在穩(wěn)定儲(chǔ)備試驗(yàn)中,需要選擇合適的激勵(lì)幅值和飛機(jī)的狀態(tài)點(diǎn),合適的幅值可盡量減少非線性因素的影響,且不會(huì)使系統(tǒng)的任何環(huán)節(jié)處于飽和狀態(tài)。具有代表性的飛機(jī)狀態(tài)點(diǎn)可以覆蓋整個(gè)飛行包線,確保整個(gè)飛行包線內(nèi)的飛行安全。除了系統(tǒng)正常狀態(tài)下的穩(wěn)定性測(cè)試以外,也應(yīng)考慮系統(tǒng)故障/非正常工作情況下的測(cè)試,如:整個(gè)控制回路中對(duì)于氣動(dòng)和大氣數(shù)據(jù)的不確定性的狀態(tài),系統(tǒng)的余度降級(jí)和余度失效的狀態(tài),液壓源系統(tǒng)因?yàn)橛喽裙收稀⒎穷A(yù)期的流量和壓力、沖擊、振動(dòng)等不正常狀態(tài)的影響。
除了考慮飛控系統(tǒng)的穩(wěn)定性以外,同時(shí)也應(yīng)保證飛控系統(tǒng)不會(huì)與飛機(jī)結(jié)構(gòu)產(chǎn)生不利的耦合。特別是確保飛控系統(tǒng)外部傳感器(慣性基準(zhǔn)/航姿基準(zhǔn)等)的安裝位置能最大限度地降低/避免因飛機(jī)裝載狀態(tài)及狀態(tài)變化引起的振動(dòng)等在內(nèi)的結(jié)構(gòu)模態(tài)耦合(SMI),并有安全的敏感性裕度。在進(jìn)行結(jié)構(gòu)模態(tài)耦合試驗(yàn)時(shí),也可以采用相同的試驗(yàn)方法,在SMIT中只需將仿真系統(tǒng)的“飛行動(dòng)力模型”替換為“彈性飛機(jī)模型”即可。
通過穩(wěn)定性試驗(yàn),驗(yàn)證了系統(tǒng)滿足操縱面速率、鉸鏈力矩和剛度的要求。操縱面的速率是充分的,是可以滿足的飛控系統(tǒng)的穩(wěn)定性要求。并且整個(gè)系統(tǒng)的時(shí)間延遲不會(huì)造成不可接受的相位滯后,飛控系統(tǒng)的增益大小合適,不會(huì)在使用范圍內(nèi)造成系統(tǒng)的發(fā)散。飛控系統(tǒng)外部傳感器的安裝位置合適,且系統(tǒng)的各種模態(tài)不會(huì)與結(jié)構(gòu)產(chǎn)生不利的耦合,
參考文獻(xiàn):
[1]MIL-HDBK-516C? AIRWORTHINESS CERTIFICATION CRITERIA
[2]JSSG-2008? Joint Service Specification Guide, Vehicle Control and Management System
[3]GJB2191—1994,有人駕駛飛機(jī)飛行控制系統(tǒng)通用規(guī)范
[4]大型運(yùn)輸飛行控制系統(tǒng)試驗(yàn)技術(shù)? ?高亞奎、安剛、支超有等[著]
作者簡(jiǎn)介:屈宗源? (1991.12-- )? 男? 漢族? 籍貫:江西九江? 職稱: 工程師? ?學(xué)歷:本科? ? 研究方向:飛行控制系統(tǒng)設(shè)計(jì)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
