基于數據的交叉口車輛排隊狀態感知方法研究
2022-02-22 05:04:54楊曉光王一喆
公路交通科技 2022年1期
關鍵詞:信號
施 康, 楊曉光, 王一喆
(1.同濟大學 道路與交通工程教育部重點實驗室,上海 201804;2.安徽超遠信息技術有限公司,安徽 合肥 230088)
0 引言
城市道路交叉口排隊狀態是非常直觀和重要的交通特征數據,對于信號控制交叉口優化設計、交通運行效率評價和交通控制信號配時等具有非常重要的作用。在早期的交叉口排隊狀態感知方法研究中,AkcelikR[1]、王進[2]、王忠宇[3]、賈利民[4]、楊永輝[5]等先后提出了一些方法,但這些方法都是基于地磁、視頻、浮動車等的數據,還有使用交通數學模型和多源數據等的研究成果,由于地磁、視頻和浮動車的數據存在受大車干擾、外界天氣環境影響、樣本量隨機不穩定性等缺陷,交通排隊數學模型則存在實時性不高、普適性差等問題,多源數據也有數據精度不夠和分析困難、計算復雜等問題,所以,這些都影響了排隊狀態感知的準確度,進而導致交通管理和信號自適應控制效率不高、信號控制交叉口交通運行效率評價不客觀等問題。因此本研究針對這些問題,提出了基于微波雷達數據的信號控制交叉口車輛排隊狀態感知方法,充分地利用微波雷達能夠提供實時性和精度高的交通參數數據特征,通過端處理器進行計算分析,而高精度、實時地感知交通排隊狀態,進而有效地提升交叉口自適應控制效果和交通運行效率評價準確度。
1 微波雷達交通感知基本原理
1.1 系統原理
微波雷達感知設備主要由微波雷達傳感器和端處理器組成,微波雷達傳感器與端處理器通過CAN總線進行數據傳輸。微波雷達傳感器采用發射和接收電磁波回波信號的方法對目標進行檢測,并利用目標回波時延和多普勒頻移得到目標的徑向距離、徑向速度、方位角等參數。
微波雷達傳感器主要檢測車輛目標的距離、速度、方位角、位置坐標等參數,后端處理器通過這些參數和現場標定測量的交叉口靜態數據進行計算分析進而感知出交通排隊狀態等交通特征參數,其工作示意框圖如圖(1)所示。另外微波雷達感知設備由于檢測縱深距離將近250 m,因此為了避免進口道感知盲區,工程應用時一般安裝在交叉口出口道方向的交通信號燈桿件上,以微波雷達感知設備正下方為坐標原點建立微波雷達自己的坐標系,其工程安裝和微波雷達坐標系如圖(2)所示。
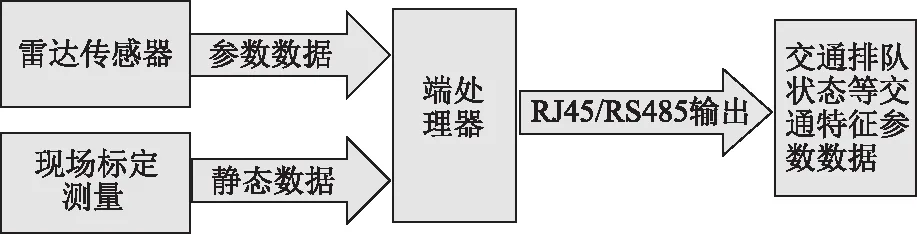
圖1 微波雷達感知設備工作示意圖Fig.1 Schematic diagram of microwave radar sensing equipment
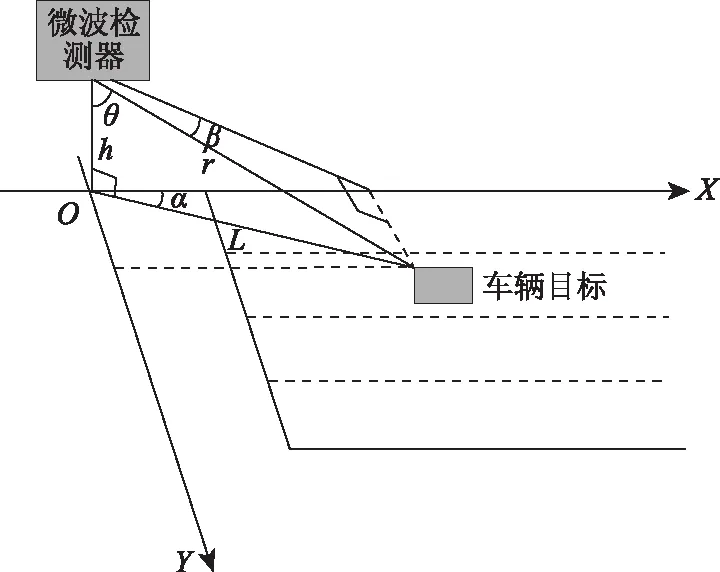
圖2 微波雷達坐標系示意圖Fig.2 Schematic diagram of microwave radar coordinate system
1.2 距離、速度和方位角檢測1.2.1 距離和速度檢測
規定線性調頻連續波發射信號掃頻帶寬為B,發射時寬為T,則調頻斜率為B/T,記為u,則LFMCW(線性調頻連續波)微波雷達發射信號為:
St(t) =Acos{2π(f0t+ut2/2)+φ0},
t∈[0,T],
(1)

Sr(t)=KrAcos{2π[(f0(t-τ(t))+u(t-τ(t))2/2]+
φ0+ψ0},t∈[τ0,T],
(2)
式中,Kr為車輛目標反射截面積和傳播衰減等有關的常量;ψ0為目標反射過程中引起的附加相移;τ0為目標初始時延。將發射信號式(1)和接收信號式(2)混頻,得到差頻信號Sb為:
t∈[τ0,T],
(3)

由于三角波調制的特點為交替發射正斜率調頻和負斜率調頻兩種信號,調制頻率與時間關系如上圖(1)和圖(2)所示,因此差頻信號式(3)可簡化為如下式如示:
t∈[τ0,T],
(4)
由于三角波調制上下掃頻信號僅調制斜率相反,獲得差頻信號原理相同,因此可得三角波上下掃頻差頻信號中頻表達式分別為:
f上m=uτ0-fd,
(5)
f下m=uτ0+fd。
(6)
可通過式(5)和式(6)解耦合,得到車輛目標的徑向距離r和徑向速度v:
(7)
(8)
1.2.2 方位角檢測
微波雷達感知設備能夠對監測區域內的目標進行多維度感知,不僅包括空間維度也包括時間維度,因此除速度、距離檢測外,其還具備方位角檢測的能力。微波雷達檢測方位角的方法主要有相位法測角和振幅法測角,本研究主要介紹相位法測角。
相位法測角是利用微波雷達傳感器多個天線所接收電磁波回波信號之間的相位差進行測方位角。如圖3所示,假設兩天線間距為d,因此它們所收到的信號由于存在波程差ΔR而產生一個相位差φ,由圖3可知:
(9)
(10)
式(9)中,λ為微波雷達電磁波波長,如果用相位計進行比相,測出其相位差φ,然后通過式(10)就可以求得目標的方位角β。
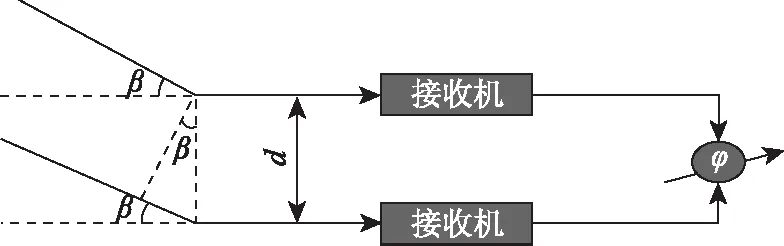
圖3 相位法測角示意圖Fig.3 Schematic diagram of angle measurement by phase method
2 交叉口進口道排隊狀態感知
2.1 靜態數據測量標定
微波雷達感知系統在信號交叉口安裝時,交叉口的一些靜態信息可以通過現場測量標定得到,這些靜態信息主要包括雷達離地面的垂直高度、每個車道的橫向坐標范圍、停止線的X坐標值等。
雷達坐標系以正下方地面為坐標原點,平行于車道為x軸,垂直于車道為y軸。在現場安裝時可以通過實際測量得到雷達離地面的高度h、停止線的X坐標值和每個車道的Y坐標范圍,具體可以參考圖(3)。
2.2 位置坐標和矢量速度計算
假定微波雷達離地面垂直高度為h已測量標定,根據圖(3)可知:
ι2=r2-h2,
(11)
(12)
由式(11)和(12)可以推導出ι和θ,如下式(13)和(14)所示:
(13)
(14)
然后由方位角b推導出其映射在地面的角度α,如下式(15)所示:
(15)
根據ι,θ和α3個參數,可以計算出車輛目標的位置坐標和矢量速度,如下式(16),(17),(18)和(19)所示:
X=ι×cosα,
(16)
Y=ι×sinα,
(17)
Vx=v×sinθ×cosα,
(18)
Vy=v×sinθ×sinα。
(19)
2.3 排隊長度和車輛數量感知方法
在檢測出車輛目標的即時速度和位置坐標以后,我們可以在建立的雷達坐標系基礎上通過設備端處理器進行計算分析,計算出車道上的車輛排隊長度和車輛數量,如圖4所示,方法闡述如下:
(1)首先根據實際安裝位置建立微波雷達感知設備的坐標系,對監控區域內的每個車道進行Y坐標值范圍的標定。
(2)微波雷達傳感器每隔50 ms對監控區域內發射微波掃描,通過車輛目標反射的微波進行混頻計算得到每個車輛目標的即時速度、位置坐標。
(3)根據車輛目標的Y坐標值,確定每個車輛目標所處的車道。
(4)在確定車道基礎上,根據X坐標值,判別離停止線最近的車輛目標即時速度是否小于等于閾值(通常定義為5 km/h)。如果沒有小于等于閾值,則繼續第2個步驟;如果小于等于閾值,則繼續往下步驟。
(5)從離停止線最近距離且速度小于等于閾值的車輛目標開始進行計算,直到遇到即時速度大于閾值的車輛目標為止,統計車輛數量,該數量結果即為車輛排隊數量;排隊長度為排隊最后一輛車的X坐標值減去停止線X坐標值再加上車輛的長度。
(6)繼續第2個步驟。

圖4 排隊長度和車輛數量計算方法流程圖Fig.4 Flowchart of calculation method of queue length and number of vehicles
3 算法測試與驗證
為充分驗證本研究提出的排隊狀態感知方法的有效性,這里從實際應用出發對該方法的有效性進行驗證,由于實際車輛排隊長度通過人眼觀測難度大,因此這里僅僅用車輛排隊數量來進行比較。以安徽省合肥市望江西路與文曲路交叉口的東進口為實際應用案例,東進口方向有5個車道,3個直行車道、1個右轉車道、1個左轉車道,由于右轉信號燈為常綠狀態且右轉車流量不是很大,因此右轉車道不會存在排隊情況,因此我們主要用直行車道和左轉車道來驗證本研究所提到方法的有效性。
合肥市望江西路與文曲路的東進口方向,車道1、車道2、車道3為直行車道,車道4為左轉車道。我們選取的時段為8:30—9:00,每次車輛排隊狀態通過人眼觀測的實際情況和微波雷達感知的情況對比結果如表1所示:
通過表1的對比情況可以得知,微波雷達感知的車輛排隊數量與實際觀測的車輛排隊數量非常接近。雖然在某些大車(公交車、卡車)存在情況下,微波雷達可能將大車感知成為1輛小車或兩輛小車,但綜合表(1)的總體對比情況,微波雷達感知的準確率是非常高的,準確率在90%~100%之間,可以為交叉口交通運行效率評價和交通信號控制提供高質量的數據支撐。另外針對這套系統方法,我們也在其他多個路口和多個時段(如夜晚時段和雨霧時段)做了同樣的驗證測試,測試結果證明,外界環境對該系統方法沒有影響,感知的車輛排隊數量準確率都在90%~100%之間。

表1 人眼觀測與微波雷達感知排隊數量對比Tab.1 Comparison of queuing numbers obtained by human eye observation and microwave radar perception
4 結論
微波雷達由于具備不受天氣等外界環境干擾且精度高,因此基于此所感知的交通排隊狀態數據具有準確率高、性能穩定等特點,可以很好地為道路交通規劃與設計、交通管理與信號控制及交通運行效率評價等提供強有力的數據支撐。實證研究也發現了本研究方法仍存在一些不足,如在某些大車存在或阻擋的情況下,該感知系統可能會將一輛大車誤認為1輛或兩輛小汽車,再就是針對非機動車和行人感知還存在準確率不高等問題。另外,針對微波雷達感知功能還可以進一步獲取不同車型的交通流量、速度,以及道路交通的飽和狀態等,這些都將是后續的重要研究方向。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06