雙發輕型民用直升機高高原試飛方法研究
2022-02-22 08:58:40李生偉趙德楊林長亮
航空工程進展 2022年1期
李生偉,趙德楊,林長亮
(哈爾濱飛機工業集團有限責任公司 飛機設計研究所,哈爾濱 150066)
0 引 言
H425-100 型雙發輕型直升機是哈爾濱飛機工業集團有限責任公司在H425 型機基礎上換裝大功率發動機和新型航電系統研制的新型直升機。與H425 型直升機相比,H425-100 型機改善了高原飛行性能,適合中國西部高原地區使用。
根據適航規章要求,為驗證直升機高原飛行性能和飛行特性,需進行高原試飛工作。國外對直升機高原適航驗證試飛方法研究比較成熟。F.Gallagher 等研 究 了K-1200 型 直 升 機 的 高 原 性能,指出直升機高原性能依賴于許多因素,最重要的有旋翼性能、發動機性能、縱向操縱余量和自轉能力等,根據飛行試驗驗證的4 600 m 密度高度下K-1200 型直升機的參數,外推了9 100 m 密度高度下直升機的高原性能,但是外推得出的性能結果缺乏實際飛行的驗證;J.Schillings 等研究了Bell 412EPI 型直升機適航驗證試飛方法,高原試飛科目包括懸停性能、近地面機動、極限高度速度包線和A 類起飛著陸性能等,但是只在中等高度條件下進行了試飛;C.Ockier 等研究了H145 型直升機在高高原條件下的適航驗證試飛方法,在4 000 m 海拔高度的高高原進行了A 類起飛、極限高度速度包線、近地面機動能力等科目的試飛,并在5 420 m 海拔高度進行了B 類起飛試飛。
國內對直升機高原適航驗證試飛技術缺乏系統研究。田磊等基于直升機高原試飛結果研究了直升機在不同離地高度下懸停時的地面效應函數模型,確定的地面效應函數模型以直升機無地效懸停性能為基準,但是沒有研究準確地確定直升機高原無地效懸停性能的方法;宋招枘等研究了直升機高原滑跑起飛性能試飛技術,提出了最大起飛質量的估算方法,但是滑跑起飛方式主要是軍用直升機在特殊環境條件下使用,民用直升機很少使用;李令等研究了直升機極限高度速度包線試飛方法,但是對于多發直升機極限高度速度包線試飛方法研究不足。
本文研究適航規章對高高原試飛的要求,確定每種試飛科目的試飛方法;應用確定的試飛方法在海拔高度3 950 m 的玉樹巴塘機場進行H425-100 型機高高原試飛。
1 適航規章對高高原試飛的要求
根據市場需求,H425-100 型機設計的使用包線如圖1 所示,其中?為起飛和著陸包線,?為飛行包線。
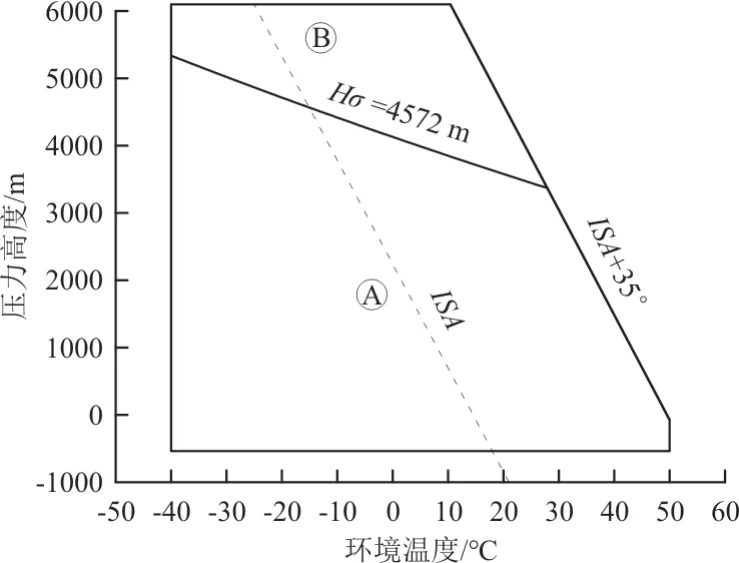
圖1 H425-100 型機高度溫度包線Fig.1 Altitude temperature envelope of H425-100
H425-100 型機最大起飛著陸高度設計目標為4 572 m 密度高度。為獲得適航批準,需要在接近最大起飛著陸高度的條件下進行試飛。
民用適航規章允許將近地面機動能力和極限高度速度試驗數據由演示試驗高度外推600 m,懸停、起飛和著陸性能試驗數據可以外推至最大1 200 m 密度高度。因此,為獲得4 572 m 密度高度條件的批準,需要在超過3 972 m 密度高度條件進行高高原試飛。
按照H425-100 型機適航驗證試飛計劃,在9~10 月之間進行高高原試飛,試飛時的環境溫度在0~10 ℃之間。為滿足密度高度超過3 972 m 的要求,試驗地點壓力高度應超過3 650 m。綜合西部地區民用機場的海拔高度和機場交通以及保障設施條件,最終選擇海拔高度約3 950 m 的青海省玉樹巴塘機場作為高高原試飛地點。
2 試飛方法和數據處理方法
2.1 懸停性能
直升機懸停性能是制定起飛著陸和極限高度速度包線試飛計劃的基礎。采用系留懸停法試飛效率高,試飛時容易控制懸停高度,試驗數據準確。
因巴塘機場沒有適宜的系留設施,試飛團隊研制可移動式系留平臺,如圖2 所示。在巴塘機場停機坪組裝系留平臺,試飛時通過直升機外吊掛吊鉤連接系留鋼索。系留鋼索長度根據試飛大綱規定的有地效懸停高度和無地效懸停高度確定。

圖2 移動平臺懸停系留試驗Fig.2 Tethered hover test with removable platform
試飛時在試飛點附近設置便攜式氣象站,測量環境溫度及風速等數據。按照適航規章要求,試飛時風速不得超過1.5 m/s。
通過葉素和動量理論建立直升機懸停所需總功率的理論模型,如式(1)所示。

式中:為旋翼槳盤面積;C為旋翼槳葉葉素平均型阻系數;為直升機懸停需用功率;為旋翼槳盤半徑;為直升機旋翼拉力,可以認為其值等于直升機懸停質量;為旋翼轉速;為直升機功率傳遞系數;為空氣密度;為旋翼實度。
假設旋翼轉速的影響可以忽略,型阻系數為常數,將上述關系式進行無因次化處理。對于大多數常規旋翼工作狀態,需用功率與旋翼拉力關系可以整理為

對于給定直升機:
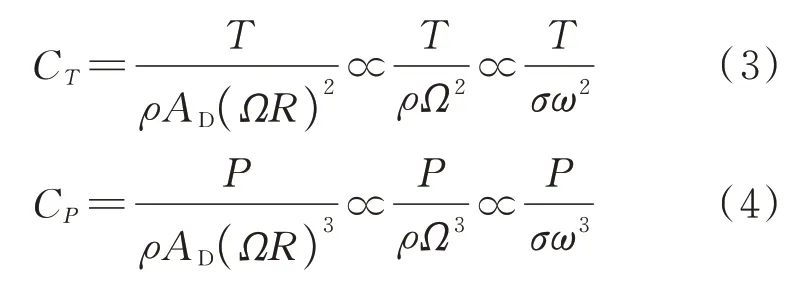
式中:為密度比,即直升機實際飛行環境下空氣密度與標準大氣密度之比;為旋翼轉速比,即直升機實際飛行時的旋翼轉速與旋翼額定轉速之比。
懸停性能試驗的目的即確定和驗證上述關系的準確形式,用于后續的性能擴展,其中變量和可以通過懸停試驗獲得,拉力系數由系留懸停試驗中一系列的拉力條件確定,功率系數由與之相應的功率條件確定。
OH-58A 直升機(NACA 0012 翼型)從試飛數據中獲得的廣義懸停性能可以表示為C與的關系曲線,如圖3 所示。當C的值較大時,線性曲線擬合與真正的數據不一致,線性形式只是C為中等值時的合理假設。假如只在小的C值時取懸停試驗數據,則以線性曲線擬合形式外推廣義的懸停性能會引起較大誤差。基于這個原因,FAA(美國聯邦航空管理局)只允許懸停性能數據的外推和/或內推到最大1 200 m。因此盡可能在大的C范圍內從冬天的接近海平面到夏天的高空條件下搜集廣義數據的懸停性能試驗。
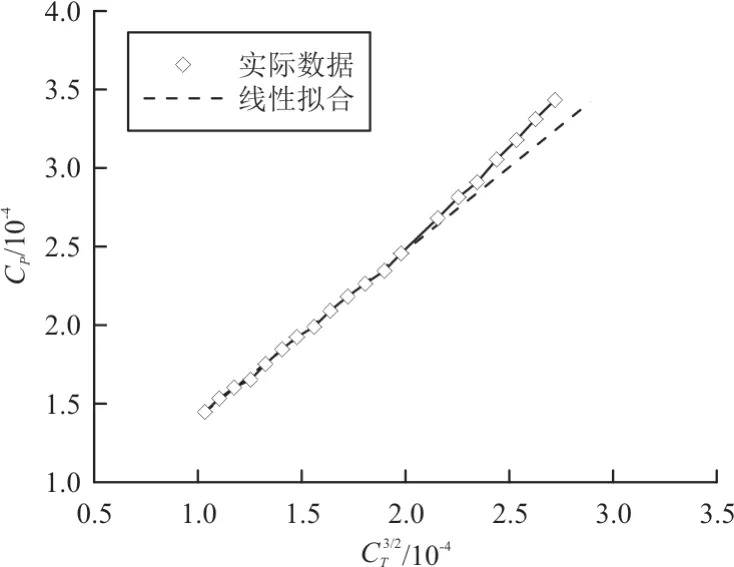
圖3 OH-58A 廣義懸停性能Fig.3 The generalized hover performance of OH-58A
2.2 模擬單發模式調整
極限高度速度包線、起飛著陸性能試飛都需要使用單發工作功率狀態,而單發工作功率狀態累計使用時間達到規定值后,發動機需進行相應的檢查維修工作,這將嚴重影響試飛工作進度。因此,新型發動機普遍提供模擬單發模式用于飛行員訓練以及試飛。H425-100 型機也設計有模擬單發模式,該模式的基本原理是使兩臺發動機工作在小功率狀態,兩臺發動機輸出功率之和等于相應的單發應急功率。另外,通過調整控制參數,模擬單發模式還能夠模擬發動機失效時的瞬態變化。
為保證模擬單發模式準確模擬發動機失效后的動態過程,在進行涉及發動機失效的試飛科目前,首先進行模擬單發模式調整試飛,然后進行真實發動機失效試飛,最后進行模擬單發模式試飛。試飛過程中飛行員維持直升機總距操縱不變,只控制直升機姿態和航向。根據試飛結果調整模擬單發模式控制參數,最終使模擬單發模式動態變化過程以及穩定輸出功率與真實發動機失效相一致。
2.3 極限高度速度包線
極限高度速度包線不僅取決于直升機性能,飛行員的操作時機對包線結果有直接影響。只有在飛行試驗中才能準確確定極限高度速度包線。
如果在試驗前能夠預估極限高度速度包線,將極大地降低試驗工作量和試飛風險。不過目前對極限高度速度包線的試飛研究主要針對單發直升機,試飛獲得的極限高度速度包線回避區結果遠大于雙發直升機在一臺發動機不工作情況下的回避區。計算方法或者基于某些機型的試飛結果過于簡單,或者基于優化算法等現代技術過于復雜,都不適于試飛前預估計算。因此極限高度速度包線是所有直升機性能試驗項目中可預測性最低的。
極限高度速度包線試驗一般采用逐步接近方法。下邊界試飛由低高度的有地效懸停開始,使用模擬單發模式模擬發動機失效,飛行員操縱直升機安全著陸。在確認著陸的安全性后增加懸停高度重復試驗,直至獲得極限高度速度包線邊界點為止。速度增加10~20 km/h 后繼續試驗,尋找包線邊界上的下一個點。上邊界試飛由高高度的無地效懸停開始,采用類似的試驗順序逐漸尋找包線邊界點。
2.4 起飛著陸性能
直升機常規起飛程序,要求按定義的起飛剖面進行起飛,爬升至15 m。起飛剖面的定義與最大起飛質量密切相關,應保證直升機能得到這樣的加速度,即在與HV 邊界留有9 km/h 安全余量及滿足功率要求的前提下,隨后加速至爬升速度。試飛目的是通過試飛(結合HV 包線試飛)確定并驗證直升機B 類起飛剖面,然后按該剖面進行試驗以對其最大起飛質量進行驗證試驗,同時檢查其起飛距離。上述過程基于試飛數據擴展為起飛圖表。
起飛距離與壓力高度和外界大氣溫度相關。將起飛距離簡化為
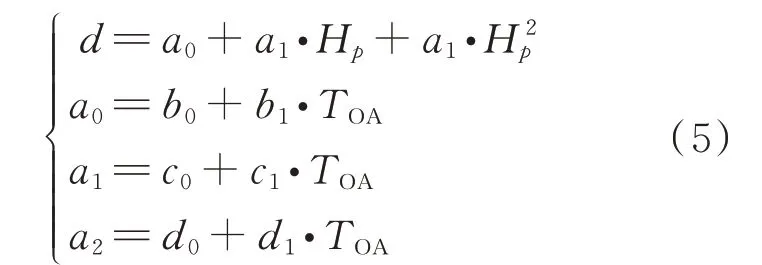
式中:H為壓力高度;為外界大氣溫度。
根據試驗結果,可以確定公式(5)中的系數、、、、和,進而得到在整個使用包線內的B類起飛距離結果。
著陸性能即凈空越過50 ft(1 ft=0.304 8 m)障礙后需要的著陸距離,注意著陸航跡同樣需要避開極限高度速度包線,將B 類著陸飛行分為空中段和地面段兩個階段。假設每個階段都是等減速運動,由運動學原理可以得出著陸過程中軸向風速、空中段進入空速、接地速度、空中段水平距離、地面段水平距離以及相應加速度、之間的簡化關系。
空中段的減速度為

地面段的減速度為

進而可以將試驗點的數據修正至0 風速及不同風速狀態。
2.5 近地面機動能力
適航規章要求在不小于8 m/s 的風速下,直升機在地面或近地面處,進行任何機動飛行不會喪失操縱。近地面機動能力通過直升機沿各種方位進行側飛和后飛來評價。試驗在無風條件下進行,事先根據機場跑道方向計算直升機進行各種方位飛行時需要保持的磁航向。試驗時首先在懸停狀態調整直升機航向至需要的方向,試飛員操縱直升機沿跑道加速飛行,加速至規定速度后保持一段約15~30 s 的穩定飛行。在一次飛行中能夠獲得一個方位直到最大允許速度的所有結果。
直升機近地面機動能力主要由尾槳設計所決定。進行近地面機動能力試飛時,為方便駕駛員了解直升機能力,在駕駛桿和腳蹬處加裝軟尺。在接近操縱限制時試飛員可以通過軟尺數據粗略判斷操縱余量。
3 試飛結果和分析
3.1 試飛概況
為確定H425-100 型機高高原性能,2017 年10月9~24 日,在玉樹巴塘機場完成了H425-100 型機高高原試飛工作,共飛行29 架次、17 h。
采用系留懸停法進行了懸停性能試飛。試飛結果擴展了H425-100 型機廣義懸停性能曲線。
在驗證了單發模擬模式與真實單發動態特性的一致性基礎上,使用單發模擬模式進行極限高度速度包線試飛,確定了在高高原條件下的極限高度速度包線。在巴塘機場完成無地效懸停質量下完整的極限高度速度包線試飛,還進行最大起飛質量即有地效懸停質量下的極限高度速度包線下邊界試飛。
在巴塘機場進行兩種起飛航跡的起飛距離試驗。試驗質量分別為無地效懸停質量和有地效懸停質量,演示在起飛過程中一臺發動機不工作后安全返回并停在起飛場地的能力,還進行這兩種質量的著陸距離試驗。
采用沿給定方位進行飛行的方法演示H425-100 型機在高高原的近地面機動能力。共完成八個方位的飛行試驗,相鄰兩個方位相差45°。
3.2 懸停性能
直升機懸停性能試驗結果通常采用無量綱系數進行處理和分析。懸停性能計算方法是計算在各種壓力高度和環境溫度組合條件下可用功率等于需用功率時的直升機質量。每個試驗場地的懸停試驗分有地效和無地效,可分別生成一條懸停曲線,對應于廣義的懸停性能曲線描述:
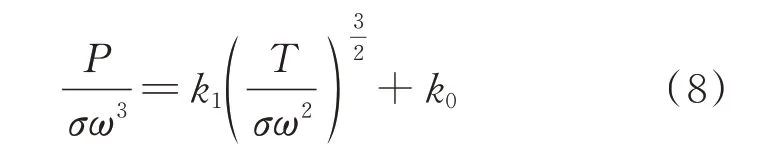
式(8)中確定合適的和值,即可計算任意給定大氣條件和功率情況下的質量。
對無地效懸停試驗測試數據進行無量綱處理后,獲得的直升機懸停時拉力系數與功率系數關系及在低高度獲得的結果如圖4 所示,可以看出:在高原條件下,直升機仍具有足夠的旋翼能力;無量綱系數關系與低高度結果相一致。
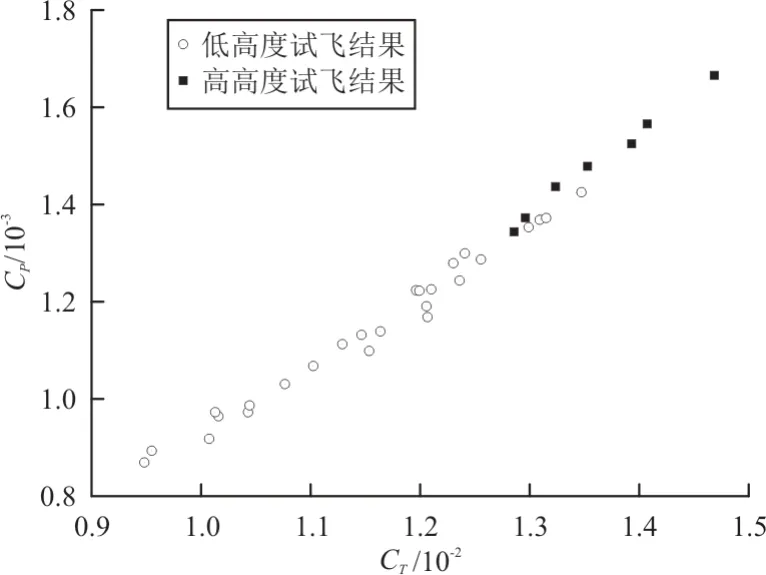
圖4 無地效懸停性能試驗結果Fig.4 Test result of OGE hover performance
試驗時壓力高度3 751 m,環境溫度為9 ℃,獲得的最大有地效懸停質量為4 069 kg,最大無地效懸停質量為3 583 kg。
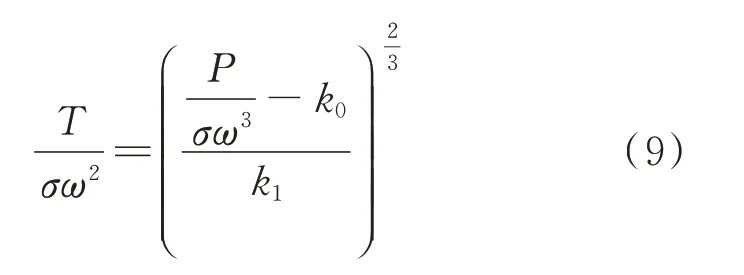
計算懸停性能曲線,即計算在給定的H和組合條件下的最大懸停質量。首先采用發動機性能計算程序計算可用功率,隨后使用得到的懸停極曲線公式計算在可用功率等于需用功率時的換算質量,如式(9)所示。
3.3 單發模擬模式調整結果
真實發動機失效和調整后的模擬單發模式在發動機失效后的扭矩和旋翼轉速變化歷程結果,如圖5 所示,可以看出:模擬單發模式的穩定輸出功率與真實單發相同,在過渡過程中模擬單發模式的輸出扭矩與真實單發略有差別,但模擬單發模式和真實單發在過渡過程中的旋翼變化基本相同。由于試驗時旋翼總距保持不變,旋翼轉速變化相同表明旋翼升力變化相同。可以認為,調整后的模擬單發模式與真實發動機失效兩種狀態下直升機具有同樣的動態響應。
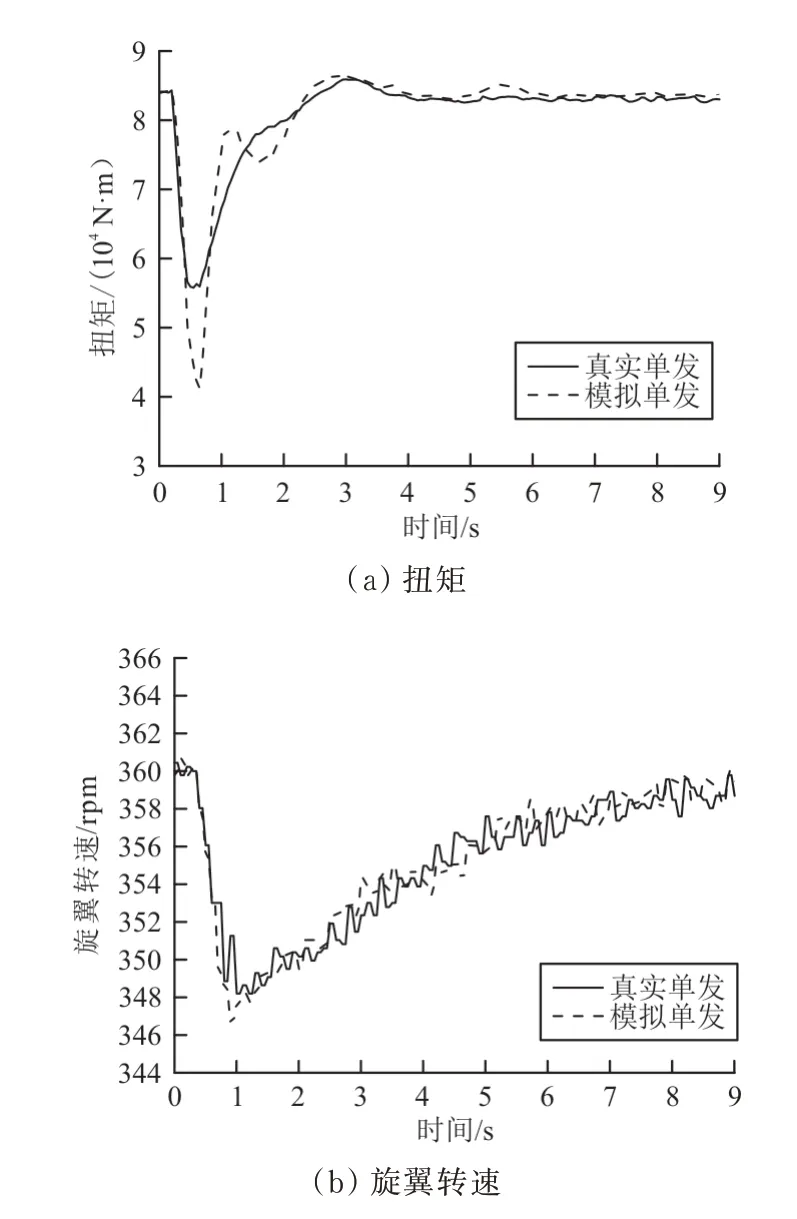
圖5 真實單發與單發模擬模式動態特性Fig.5 Transient characteristic of real OEI and OEI simulating mode
3.4 極限高度速度包線結果
極限高度速度包線試驗結果如圖6 所示。圖中完整的包線是適航規章要求的無地效懸停質量下的結果,試飛質量為3 600 kg,試驗時的平均壓力高度為12 294 ft,平均環境溫度為5.4 ℃。試驗得出的懸停低點高度為3 m,懸停高度高度為83 m,膝點高度為15 m,速度為55 km/h。
單獨的極限高度速度包線下邊界是有地效懸停質量下的結果如圖6 所示。 試飛質量為4 000 kg,試驗時的平均壓力高度為3 748 m,平均環境溫度為6 ℃。在有地效懸停質量下,極限高度速度包線懸停低點高度為1.8 m,膝點高度為15 m,速度為74 km/h。
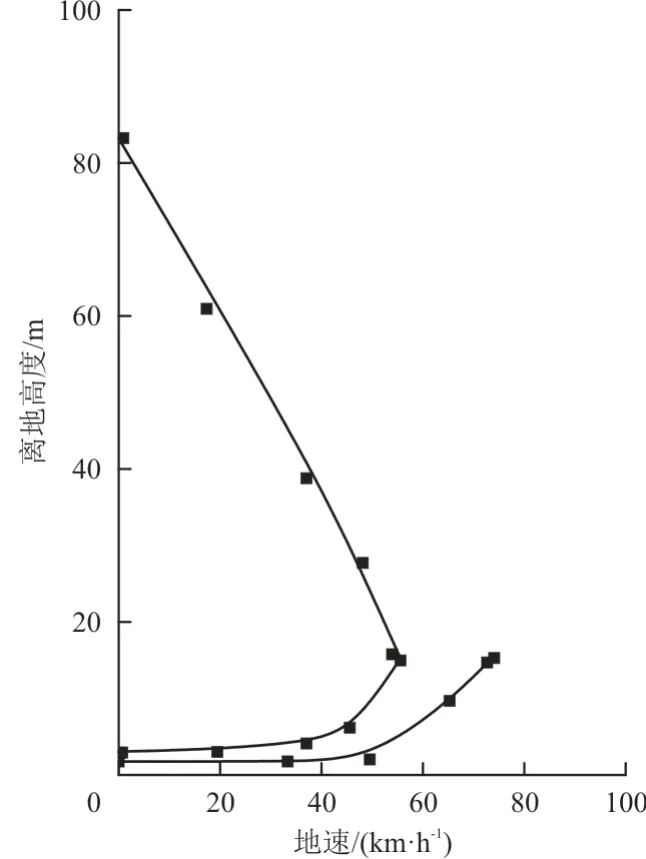
圖6 極限高度速度包線試驗結果Fig.6 Test results of height velocity envelope
3.5 起飛著陸性能結果
根據極限高度速度包線試驗結果,綜合起飛時的駕駛技術難度以及直升機飛行性能,制定了兩種起飛剖面。起飛剖面1 與在平原和次高原地區使用的起飛剖面相同。在玉樹進行試驗的環境條件下,起飛剖面1 適用于起飛質量小于3 600 kg情況,能夠保證在最大起飛質量下起飛剖面距極限高度速度包線回避區最小間隙不小于9 km/h。與起飛剖面1 相比,起飛剖面2 增大了起飛速度,適用于直升機起飛質量超過3 600 kg 情況。
起飛剖面1 試驗質量為3 600 kg,試驗時壓力高度為3 732 m,環境溫度為15 ℃,多次試驗得到的起飛距離平均值為208 m。
起飛剖面2 試驗質量為4 100 kg,試驗時壓力高度為3 755 m,環境溫度為14 ℃,多次試驗得到的起飛距離平均值為515 m。
以起飛著陸試飛數據為基礎,采用最小二乘法擬合起飛距離和著陸距離公式。通過擬合公式可以計算在其他高度溫度條件下的起飛距離和著陸距離性能。
根據試飛結果,高度與外界大氣溫度可以通過試飛直接測得,距離可用D-GPS 得到,通過數據處理可以確 定公式 中的系數、、、、和,進而得到在整個使用包線內的B 類起飛距離結果。
H425-100 型機B 類著陸剖面為在離地高度15 m 時以83 km/h 速度進場,在離地高度5 m 時操縱直升機減速,以約37 km/h 速度著陸,使用機輪剎車和旋翼操縱使直升機滑跑一段距離后完全停止。

進行質量為3 600 和4 000 kg 的雙發著陸和單發著陸試驗,試驗結果表明在著陸過程中直升機需用功率較小,發動機工作狀態對著陸距離結果影響較小。由于3 600 kg 時接地前減速效果比4 000 kg 更明顯,接地速度小,因此3 600 kg 時的著陸距離比4 000 kg 時要短。3 600 kg 著陸試驗時壓力高度3 810 m,環境溫度8 ℃,風速1 m/s。雙發著陸距離平均值為262 m,單發著陸距離平均值為283 m。4 000 kg 著陸試驗時壓力高度3 749 m,環境溫度6 ℃,風速2 m/s。雙發著陸距離平均值為387 m,單發著陸距離平均值為434 m。
3.6 近地面機動能力結果
在高高原,近地面機動能力通常受到航向操縱限制。H425-100 型機在左側飛時操縱量隨側飛速度的變化規律如圖7 所示,可以看出:隨著側飛速度增加,航向操縱量增加。如果以10%操縱行程作為操縱余量,左側飛最大速度為8 m/s。
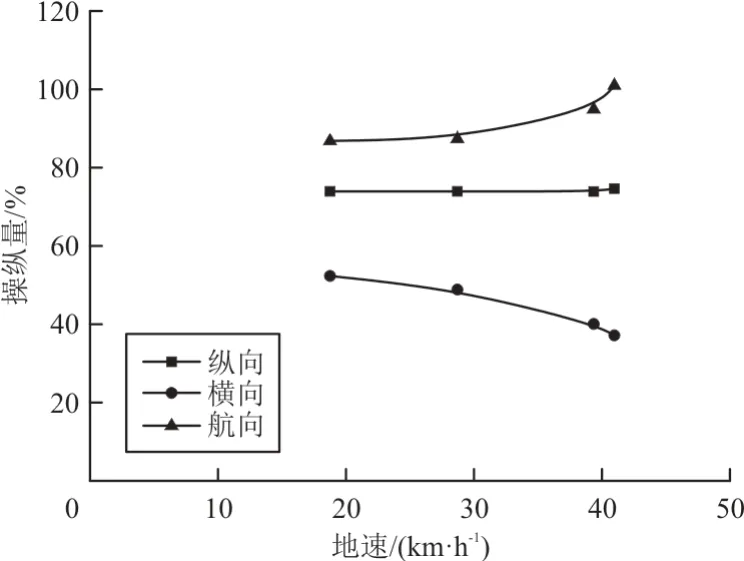
圖7 操縱量隨左側飛速度變化規律Fig.7 Control positions chance with left sideward speed
以航向操縱留10%行程余量為標準確定的不同方位的最大速度結果及左前極限重心和右前極限重心兩種狀態的試驗結果如圖8 所示。
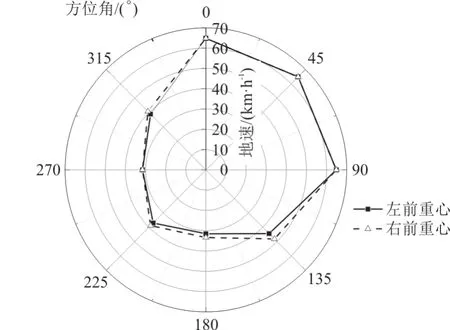
圖8 近地面機動最大速度試驗結果Fig. 8 Test results of the max speed in maneuver near ground
從圖8 可以看出:H425-100 型機近地面機動的臨界方位為左側飛和后飛;左前重心的最大速度略小于右前重心,但區別不是十分明顯。
4 結 論
(1)在高高原地區,由于天氣條件多變,滿足懸停性能試飛風速要求的天氣十分難得,采用高效率的系留懸停法可以獲得更準確的試驗數據。
(2)在高高原地區,使用模擬單發模式進行極限高度速度包線等高風險試飛科目可以有效地降低試飛風險,保證試飛工作順利完成。
(3)與性能理論計算方法和工程仿真模擬方法相比,以起飛著陸試飛結果為基礎,使用擬合方法獲得直升機起飛距離和著陸距離的計算公式,可以更準確地確定直升機起飛著陸性能。
H425-100 型機高高原適航驗證試飛是國內首次在高高原地區系統地完成適航規章要求的所有驗證科目的試飛。H425-100 型機已獲得中國民用航空局頒發的型號合格證,本文介紹的高高原試飛中所采用的試驗方法已獲得中國民用航空局的認可,對今后同等級的國產雙發民用直升機適航驗證工作具有重要的借鑒意義。
