面向空間站復(fù)雜環(huán)境的尖端生長(zhǎng)型氣動(dòng)軟體機(jī)器人設(shè)計(jì)
2022-02-21 10:25:32李朋春彭福軍郭國(guó)仁周德開
液壓與氣動(dòng) 2022年2期
李朋春, 陳 萌, 彭福軍, 郭國(guó)仁, 周德開
(1.上海市空間飛行器機(jī)構(gòu)重點(diǎn)實(shí)驗(yàn)室, 上海 201109;2.哈爾濱工業(yè)大學(xué) 機(jī)器人技術(shù)與系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室, 黑龍江 哈爾濱 150001)
引言
空間站建設(shè)工程已成為世界航天領(lǐng)域的研究熱點(diǎn),其中故障檢修機(jī)器人是空間站建設(shè)、運(yùn)營(yíng)和發(fā)展不可或缺的關(guān)鍵設(shè)備。空間站狹小的空間環(huán)境和精密的裝置儀器對(duì)檢測(cè)設(shè)備提出了更高的要求,而目前空間站的檢測(cè)維修裝備多為空間機(jī)械臂等剛性裝備,作用范圍較小、結(jié)構(gòu)適應(yīng)性不足、剛性沖擊大,不能適應(yīng)狹小精密的空間站環(huán)境,制約了空間站建設(shè)的發(fā)展。因此,亟待發(fā)展柔性空間站檢修機(jī)器人來彌補(bǔ)現(xiàn)有剛性設(shè)備的不足。
近年來,憑借輕便的運(yùn)動(dòng)形式、極高的環(huán)境兼容性以及高度的安全性[1],軟體機(jī)器人迅速發(fā)展。目前國(guó)內(nèi)外按運(yùn)動(dòng)方式將仿生軟體移動(dòng)機(jī)器人劃分為蠕動(dòng)式[2-4]、足式[5-7]、翻滾式[8-10]和生長(zhǎng)式[11-13]等。其中,蠕動(dòng)式機(jī)器人模擬蚯蚓、毛毛蟲的運(yùn)動(dòng)特征,運(yùn)動(dòng)平穩(wěn)可靠,但其普遍運(yùn)動(dòng)效率低且難以適應(yīng)落差較大的地形;足式機(jī)器人一定程度上能夠跨越障礙適應(yīng)復(fù)雜地形,缺點(diǎn)在于運(yùn)動(dòng)中重心不穩(wěn),易發(fā)生側(cè)翻現(xiàn)象;翻滾式機(jī)器人擁有很高的運(yùn)動(dòng)速度和環(huán)境適應(yīng)性,但是其運(yùn)動(dòng)極易受環(huán)境影響,運(yùn)動(dòng)不平穩(wěn)。相比此3種類型的軟體機(jī)器人,生長(zhǎng)式軟體機(jī)器人因其具有更加全面、更加優(yōu)越的運(yùn)動(dòng)性能而受到廣泛的關(guān)注。
自然界的藤蔓植物可以通過尖端細(xì)胞的伸長(zhǎng)和增殖實(shí)現(xiàn)尖端的生長(zhǎng),并通過細(xì)胞的不對(duì)稱生長(zhǎng)來實(shí)現(xiàn)尖端轉(zhuǎn)向,使其能適應(yīng)地面各種復(fù)雜環(huán)境,表現(xiàn)出極高的環(huán)境順應(yīng)性,是軟體機(jī)器人良好的仿生對(duì)象。本研究關(guān)注的仿“藤蔓”尖端生長(zhǎng)機(jī)器人以軟體機(jī)器人廣泛采用的流體壓力作為驅(qū)動(dòng)方式[14-17],以聚乙烯筒狀薄膜為主體材料,將內(nèi)翻穿過中心的薄膜作為“待生長(zhǎng)細(xì)胞”,通過內(nèi)部氣壓驅(qū)動(dòng)薄膜不斷外翻,以延長(zhǎng)其長(zhǎng)度來模擬藤蔓類植物尖端生長(zhǎng)過程,理論上可無限延伸[11]。為了進(jìn)一步擴(kuò)大機(jī)器人的工作范圍,對(duì)其轉(zhuǎn)向?qū)Ш椒桨傅脑O(shè)計(jì)一度是研究重點(diǎn)。國(guó)外學(xué)者曾利用氣囊人工肌肉[18]和尾部繩索張力[19]實(shí)現(xiàn)機(jī)器人的轉(zhuǎn)彎致動(dòng),然而機(jī)器人的柔性特征導(dǎo)致轉(zhuǎn)彎關(guān)節(jié)之間的耦合作用嚴(yán)重影響其可控性和轉(zhuǎn)彎精度,使機(jī)器人的運(yùn)動(dòng)局限于短程、簡(jiǎn)單的路徑規(guī)劃。本研究設(shè)計(jì)了小型舵機(jī)線驅(qū)動(dòng)轉(zhuǎn)向單元來實(shí)現(xiàn)機(jī)器人的關(guān)節(jié)轉(zhuǎn)向,轉(zhuǎn)彎角度可以通過舵機(jī)收線長(zhǎng)度精確調(diào)整;同時(shí)各舵機(jī)轉(zhuǎn)向單元的獨(dú)立控制解除了轉(zhuǎn)彎關(guān)節(jié)間的耦合作用,最終提出了一種可主動(dòng)控制的多自由度尖端生長(zhǎng)軟體機(jī)器人。
首先,提出了新型尖端生長(zhǎng)軟體機(jī)器人的運(yùn)動(dòng)結(jié)構(gòu)和控制方案,驗(yàn)證了運(yùn)動(dòng)方案的可行性;結(jié)合機(jī)器人運(yùn)動(dòng)特點(diǎn),建立了機(jī)器人的轉(zhuǎn)彎運(yùn)動(dòng)學(xué)模型,將機(jī)器人驅(qū)動(dòng)參數(shù)與尖端位置建立關(guān)系,并利用有限元仿真分析了關(guān)節(jié)轉(zhuǎn)向時(shí)的驅(qū)動(dòng)性能;最后,通過實(shí)驗(yàn)驗(yàn)證了主動(dòng)控制下機(jī)器人的運(yùn)動(dòng)能力和避障功能。
1 運(yùn)動(dòng)方案設(shè)計(jì)
尖端生長(zhǎng)軟體機(jī)器人通過仿生學(xué)原理借鑒藤蔓植物在復(fù)雜環(huán)境下的適應(yīng)性生長(zhǎng)模式,其運(yùn)動(dòng)系統(tǒng)主要由機(jī)器人主體、小型舵機(jī)轉(zhuǎn)向單元、舵機(jī)控制芯片、存儲(chǔ)密封盒以及氣泵等組成。
1.1 機(jī)器人運(yùn)動(dòng)原理
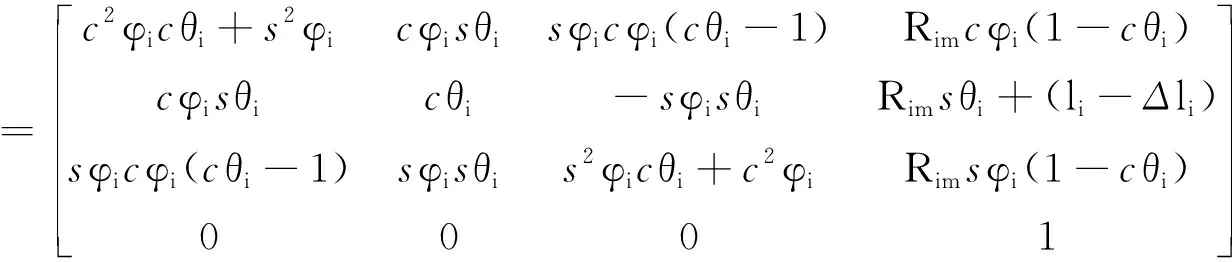
機(jī)器人主體是直徑為76.4 mm的聚乙烯筒膜,一端密封后內(nèi)翻穿過主體內(nèi)部并最終存儲(chǔ)在密封盒內(nèi)。持續(xù)輸入氣壓過程中,存儲(chǔ)的主體開始釋放并在尖端實(shí)現(xiàn)外翻生長(zhǎng),如圖1所示。與普通機(jī)器人的摩擦驅(qū)動(dòng)方式不同,該氣動(dòng)外翻方式使得機(jī)器人可以脫離支撐表面實(shí)現(xiàn)運(yùn)動(dòng),尤其適合摩擦驅(qū)動(dòng)不足的空間站失重環(huán)境,同時(shí)該存儲(chǔ)方式提高了主體收納比,實(shí)現(xiàn)了機(jī)器人的小型化和輕量化,也滿足空間應(yīng)用需求。
機(jī)器人頂端轉(zhuǎn)向方案設(shè)計(jì)是此前研究的重點(diǎn)[11,18-23]。自然界藤蔓植物通過兩側(cè)細(xì)胞的不對(duì)稱生長(zhǎng)實(shí)現(xiàn)尖端轉(zhuǎn)彎從而躲避障礙并適應(yīng)環(huán)境,借鑒此原理, 設(shè)計(jì)了一系列的線驅(qū)動(dòng)轉(zhuǎn)彎單元。轉(zhuǎn)彎單元由小型舵機(jī)、固定端圓片、中間連接線以及舵機(jī)控制芯片組成,其中小型舵機(jī)性能參數(shù)如表1所示,沿著主體軸線方向用雙面膠貼附于主體上,舵機(jī)的轉(zhuǎn)動(dòng)收線使中間連接線縮短導(dǎo)致了兩側(cè)主體的長(zhǎng)度差,從而實(shí)現(xiàn)了機(jī)器人的轉(zhuǎn)彎過程,如圖1所示。同時(shí),機(jī)器人轉(zhuǎn)彎角度可由收線長(zhǎng)度精確控制,并通過控制舵機(jī)的正反轉(zhuǎn)實(shí)現(xiàn)了轉(zhuǎn)向的可逆性,這種設(shè)計(jì)顯著提高了機(jī)器人的轉(zhuǎn)彎精度和可控性。在此基礎(chǔ)上,合理安排主體上轉(zhuǎn)彎單元的密度和轉(zhuǎn)彎角度,機(jī)器人可以主動(dòng)適應(yīng)復(fù)雜環(huán)境。
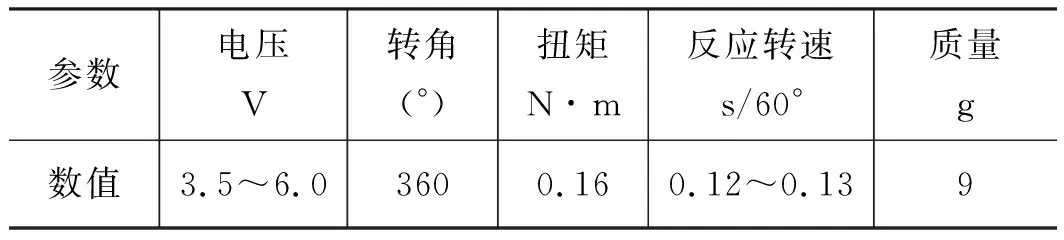
表1 舵機(jī)性能參數(shù)Tab.1 Performance parameters of servo

圖1 機(jī)器人運(yùn)動(dòng)原理圖Fig.1 Principle of motion in a soft robot
1.2 機(jī)器人控制原理
控制系統(tǒng)部分是完成各轉(zhuǎn)向關(guān)節(jié)中舵機(jī)的實(shí)時(shí)控制,使其在主動(dòng)控制下實(shí)現(xiàn)按需的連續(xù)轉(zhuǎn)向。控制系統(tǒng)包括人機(jī)交互部分(發(fā)送端)和運(yùn)動(dòng)執(zhí)行部分(接收端),如圖2所示,在復(fù)雜空間站內(nèi)部為避免線纜的束縛、影響運(yùn)動(dòng)靈活性,兩者之間通過無線射頻通訊方式實(shí)現(xiàn)信息交互。

圖2 控制系統(tǒng)組成Fig.2 Composition of control system
發(fā)送端依靠Arduino控制程序向外發(fā)送指令信號(hào),接收端主體上的每個(gè)舵機(jī)都由對(duì)應(yīng)的寫入特定地址的控制芯片來控制,控制模塊地址與指令信號(hào)一致的舵機(jī)完成相應(yīng)的拉線動(dòng)作,從而將控制信號(hào)精準(zhǔn)導(dǎo)航到各執(zhí)行器,實(shí)現(xiàn)了舵機(jī)轉(zhuǎn)彎單元的解耦控制,使各關(guān)節(jié)轉(zhuǎn)彎互不影響,大大提高了柔性機(jī)器人運(yùn)動(dòng)的可控性。控制系統(tǒng)的設(shè)計(jì)使操作員可以通過一個(gè)簡(jiǎn)單的接口來控制機(jī)器人的所有執(zhí)行器。
2 運(yùn)動(dòng)學(xué)模型
2.1 驅(qū)動(dòng)空間到關(guān)節(jié)空間的轉(zhuǎn)彎模型分析
為了控制尖端生長(zhǎng)軟體機(jī)器人的運(yùn)動(dòng)軌跡,建立平面層次上精確的運(yùn)動(dòng)學(xué)模型,需要建立轉(zhuǎn)彎角度與舵機(jī)轉(zhuǎn)彎單元驅(qū)動(dòng)參數(shù)之間的函數(shù)關(guān)系式。轉(zhuǎn)彎角度取決于小型舵機(jī)的收線長(zhǎng)度,轉(zhuǎn)彎模型如圖3所示。利用主體轉(zhuǎn)彎處的幾何關(guān)系學(xué)將此理論關(guān)系式表示如下:
(1)
式中, Δl—— 舵機(jī)收線長(zhǎng)度
θ—— 轉(zhuǎn)向關(guān)節(jié)轉(zhuǎn)彎角度,θ∈[0,π]
R—— 轉(zhuǎn)向關(guān)節(jié)彎曲對(duì)側(cè)外邊緣線的曲率半徑,即主體直徑
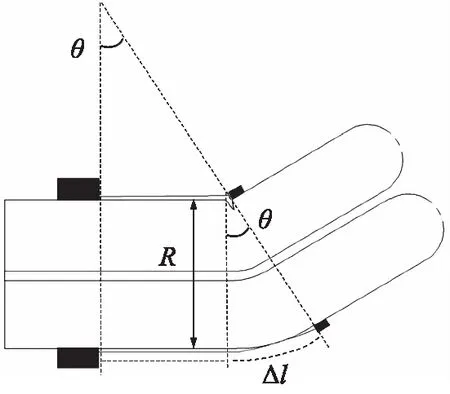
圖3 轉(zhuǎn)彎模型Fig.3 Steering model
2.2 關(guān)節(jié)空間和任務(wù)空間的運(yùn)動(dòng)學(xué)模型分析
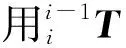
采用柔性機(jī)器人中最常用的分段常曲率法來建立運(yùn)動(dòng)學(xué)模型[24-25]。關(guān)節(jié)空間和任務(wù)空間之間的映射關(guān)系即分析關(guān)節(jié)參數(shù)中的轉(zhuǎn)向角度θi和旋轉(zhuǎn)定位角φi與轉(zhuǎn)向關(guān)節(jié)末端位姿的關(guān)系。其中,由于本研究?jī)H分析平面內(nèi)的運(yùn)動(dòng)規(guī)劃,因此旋轉(zhuǎn)定位角φi∈[0,π]。在運(yùn)動(dòng)學(xué)分析中,末端的位姿利用位姿矩陣進(jìn)行描述,因此求取末端位姿的運(yùn)動(dòng)學(xué)問題轉(zhuǎn)化為初始坐標(biāo)系Oi-1Xi-1Yi-1Zi-1和末端坐標(biāo)系OiXiYiZi的齊次變換問題,其轉(zhuǎn)彎運(yùn)動(dòng)學(xué)模型如圖4所示。
轉(zhuǎn)向關(guān)節(jié)末端的位姿包括位置和姿態(tài)信息,其中末端位置坐標(biāo)可以表示為:
(2)
式中,Rim—— 第i段轉(zhuǎn)向關(guān)節(jié)中心軸線的曲率半徑,Δlim=θi·Rim,Δlim表示中心軸線彎曲產(chǎn)生褶皺時(shí)的弧長(zhǎng)
θi—— 第i段轉(zhuǎn)向關(guān)節(jié)轉(zhuǎn)彎角度
φi—— 第i段轉(zhuǎn)向關(guān)節(jié)旋轉(zhuǎn)定位角
li—— 第i段轉(zhuǎn)向關(guān)節(jié)直立生長(zhǎng)時(shí)的總長(zhǎng)度
Δli—— 第i段轉(zhuǎn)向關(guān)節(jié)彎曲轉(zhuǎn)向θi對(duì)應(yīng)的未發(fā)生褶皺一側(cè)外邊緣弧長(zhǎng)
li-Δli—— 第i段轉(zhuǎn)向關(guān)節(jié)未發(fā)生轉(zhuǎn)向直立生長(zhǎng)的主體長(zhǎng)度
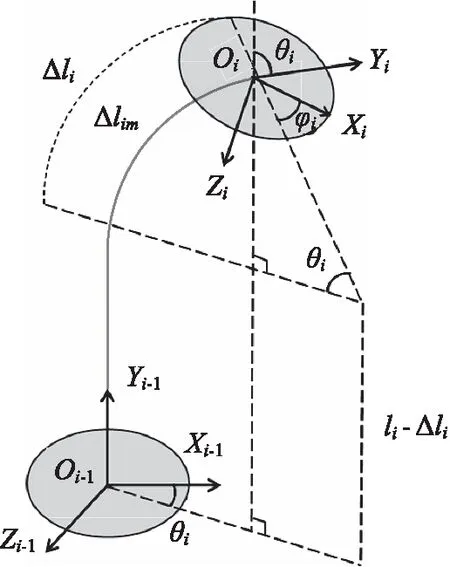
圖4 運(yùn)動(dòng)學(xué)模型Fig.4 Kinematic model
因此可以將末端坐標(biāo)系位置的變換轉(zhuǎn)換成一次平移變換:
Trans[Rimcosφi(1-cosθi),Rimsinθi+(li-Δli),
Rimsinφi(1-cosθi)]
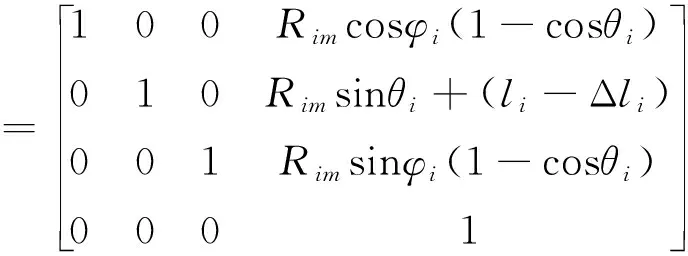
(3)
末端姿態(tài)的變換可以通過坐標(biāo)系旋轉(zhuǎn)得到,因此從初始坐標(biāo)系Oi-1Xi-1Yi-1Zi-1到末端坐標(biāo)系OiXiYiZi的空間位姿變換可以按以下4個(gè)步驟完成:
(1) 沿初始坐標(biāo)系Oi-1Xi-1Yi-1Zi-1的3個(gè)坐標(biāo)軸按式(3)平移得到Oi點(diǎn);
(2) 繞初始坐標(biāo)系Oi-1Xi-1Yi-1Zi-1的Yi-1軸旋轉(zhuǎn)-φi,記為Rot(Yi-1,-φi);
(3) 繞新的Zi-1軸旋轉(zhuǎn)-θi, 記為Rot(Zi-1, -θi);
(4) 繞新的Yi-1軸旋轉(zhuǎn)φi,記為Rot(Yi-1,φi)。
其中Rot(Yi-1,-φi),Rot(Zi-1,-θi),Rot(Yi-1,φi)分別為:
(4)
(5)
(6)

s?=sin?。
3 驅(qū)動(dòng)性能測(cè)試
通過對(duì)尖端生長(zhǎng)軟體機(jī)器人系統(tǒng)的設(shè)計(jì)以及運(yùn)動(dòng)學(xué)特性和彎曲驅(qū)動(dòng)性能的分析,得到了生長(zhǎng)型軟體機(jī)器人理論模型,同時(shí)需要通過對(duì)軟體機(jī)器人在氣體壓力的驅(qū)動(dòng)下生長(zhǎng)以及轉(zhuǎn)向運(yùn)動(dòng)模塊的作用下彎曲轉(zhuǎn)向過程進(jìn)行運(yùn)動(dòng)仿真分析, 驗(yàn)證設(shè)計(jì)方案的合理性與正確性。
Rot(Yi-1,φi)
(7)
3.1 單關(guān)節(jié)生長(zhǎng)與轉(zhuǎn)向仿真
本研究主要利用ABAQUS仿真軟件中的流體腔模型進(jìn)行建模分析,可以通過控制流體腔內(nèi)部氣體壓力以及充入流體腔內(nèi)部氣體質(zhì)量速率實(shí)現(xiàn)生長(zhǎng)型軟體機(jī)器人的外翻生長(zhǎng),生長(zhǎng)分析步完成后建立舵機(jī)與圓片的虛擬連接線并施加相對(duì)作用力來模擬真實(shí)的舵機(jī)驅(qū)動(dòng)拉力,從而產(chǎn)生轉(zhuǎn)彎效果,建立的模型如圖5所示,表2為主體生長(zhǎng)轉(zhuǎn)彎仿真模型設(shè)置的基礎(chǔ)參數(shù)。
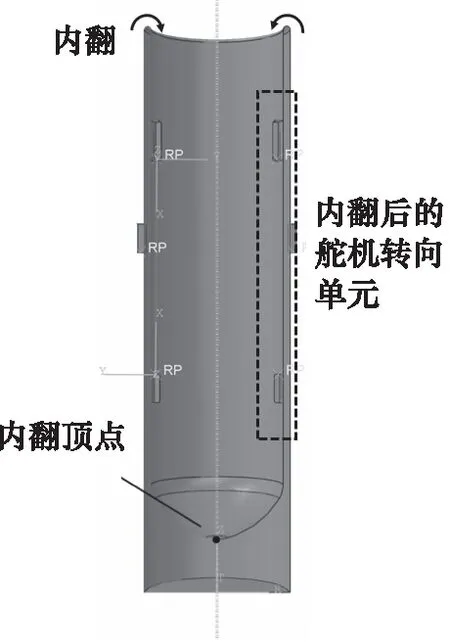
圖5 生長(zhǎng)與轉(zhuǎn)向的仿真模型Fig.5 Simulation model for growth and steering
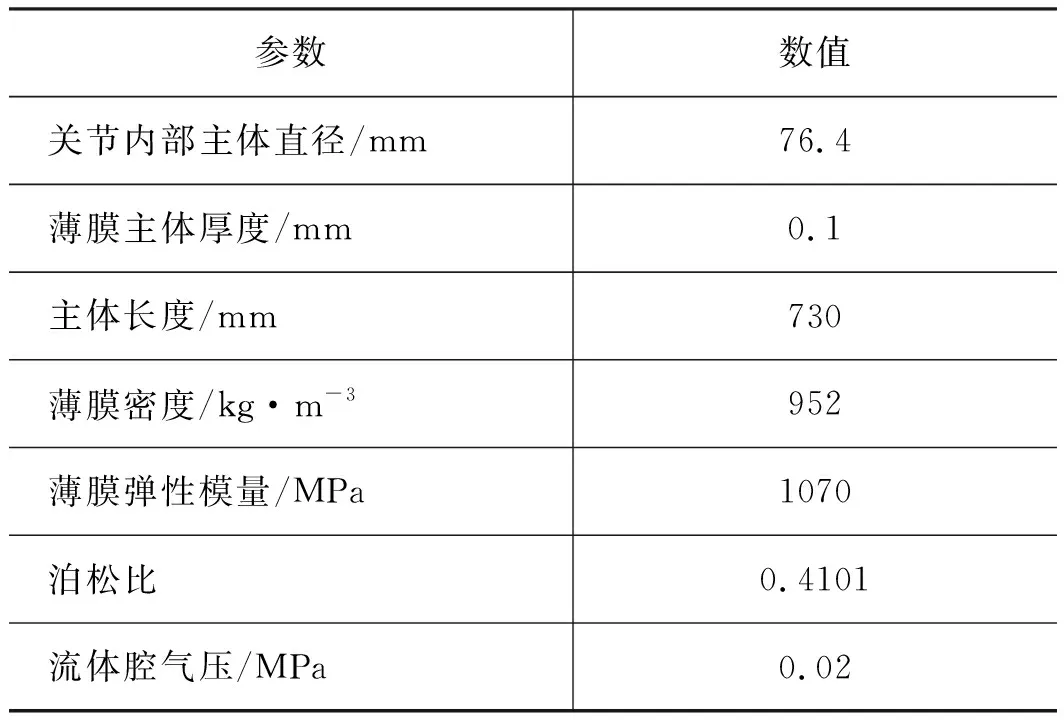
表2 仿真模型基礎(chǔ)參數(shù)Tab.2 Parameters of simulation model
如圖6所示為生長(zhǎng)轉(zhuǎn)向的仿真模擬過程。從狀態(tài)變化過程可以看出,儲(chǔ)存在內(nèi)部的主體在流體腔壓力作用下由尖端開始外翻并可以完全展開,其生長(zhǎng)運(yùn)動(dòng)平穩(wěn),主體位移變化量從頂端位置向初始狀態(tài)的方向逐漸減小,印證了薄膜主體在氣體驅(qū)動(dòng)下逐步外翻生長(zhǎng)的連續(xù)過程的正確性,符合真實(shí)運(yùn)動(dòng)狀態(tài);內(nèi)部折疊的主體帶動(dòng)轉(zhuǎn)向關(guān)節(jié)固定端完全生長(zhǎng)出后,主體在連接線拉力作用下實(shí)現(xiàn)了彎曲轉(zhuǎn)向,其轉(zhuǎn)彎點(diǎn)保持在固定端圓片位置。由上述可以判斷轉(zhuǎn)向關(guān)節(jié)可以穩(wěn)定、平滑、無沖擊的實(shí)現(xiàn)生長(zhǎng)轉(zhuǎn)向的連續(xù)運(yùn)動(dòng),保證運(yùn)動(dòng)的穩(wěn)定性和準(zhǔn)確性,驗(yàn)證了外翻運(yùn)動(dòng)模式和舵機(jī)線驅(qū)動(dòng)轉(zhuǎn)向方案的可行性。

圖6 生長(zhǎng)與轉(zhuǎn)向模型仿真結(jié)果Fig.6 Simulation result of growth and steering model
3.2 雙關(guān)節(jié)轉(zhuǎn)向仿真
在直立生長(zhǎng)和單關(guān)節(jié)轉(zhuǎn)彎仿真的基礎(chǔ)上,為分析不同關(guān)節(jié)間轉(zhuǎn)彎的相互影響,設(shè)計(jì)了如圖7所示雙關(guān)節(jié)生長(zhǎng)型軟體機(jī)器人形態(tài)變換仿真分析以及實(shí)驗(yàn)測(cè)試。所設(shè)計(jì)的主體參數(shù)與表2基本一致,不同點(diǎn)在于主體長(zhǎng)度增長(zhǎng)為1034 mm,在每個(gè)轉(zhuǎn)向關(guān)節(jié)兩側(cè)均設(shè)置模擬連接器,根據(jù)需要施加對(duì)應(yīng)載荷來產(chǎn)生相應(yīng)變形。
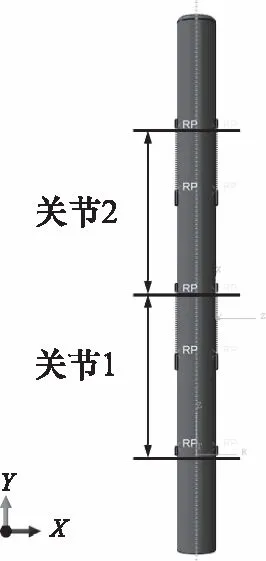
圖7 雙關(guān)節(jié)轉(zhuǎn)向主體仿真模型Fig.7 Simulation model of double joint steering body
圖8a~圖8c為雙關(guān)節(jié)生長(zhǎng)型軟體機(jī)器人形態(tài)變化的仿真結(jié)果。其中圖8a表示兩關(guān)節(jié)連續(xù)向左轉(zhuǎn)彎的狀態(tài),圖8b表示向左轉(zhuǎn)向后再向右轉(zhuǎn)向的狀態(tài),圖8c表示兩關(guān)節(jié)連續(xù)向右轉(zhuǎn)向的狀態(tài)。3種狀態(tài)間可以實(shí)現(xiàn)連續(xù)變換,體現(xiàn)了舵機(jī)線驅(qū)動(dòng)轉(zhuǎn)彎方案的可調(diào)性和可逆性。同時(shí)可以看出,不同關(guān)節(jié)之間的驅(qū)動(dòng)互不干涉,其轉(zhuǎn)彎是解耦的,大大提高了機(jī)器人運(yùn)動(dòng)的精度和可控性,是機(jī)器人實(shí)現(xiàn)主動(dòng)可控的路徑規(guī)劃的基礎(chǔ)。
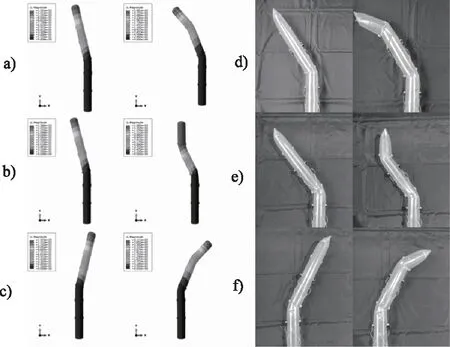
a) 連續(xù)向左轉(zhuǎn)向仿真a) Simulation of continuous left steeringb) 左右轉(zhuǎn)向仿真b) Simulation of left and then right steeringc) 連續(xù)向右轉(zhuǎn)向仿真c) Simulation of continuous right steeringd) 連續(xù)向左轉(zhuǎn)向?qū)嶒?yàn)d) Experiment of continuous left steeringe) 左右轉(zhuǎn)向?qū)嶒?yàn)e) Experiment of left and then right steeringf) 連續(xù)向右轉(zhuǎn)向?qū)嶒?yàn)f) Experiment of continuous right steering圖8 雙關(guān)節(jié)模型仿真與實(shí)驗(yàn)結(jié)果Fig.8 Simulation and experiment results of double joint model
圖8d~圖8f為雙關(guān)節(jié)生長(zhǎng)型軟體機(jī)器人多形態(tài)變換的實(shí)驗(yàn)測(cè)試過程。可以發(fā)現(xiàn)實(shí)驗(yàn)測(cè)試的3種變形與仿真模擬的對(duì)應(yīng)形態(tài)吻合度高,同樣可以實(shí)現(xiàn)多形態(tài)的位姿變換,并且在形態(tài)變換的過程中速度較快,具備了足夠的運(yùn)動(dòng)效率。通過與各關(guān)節(jié)生長(zhǎng)性能協(xié)調(diào)配合,可以完成復(fù)雜環(huán)境的探測(cè)任務(wù)。
4 機(jī)器人運(yùn)動(dòng)實(shí)驗(yàn)
4.1 轉(zhuǎn)彎模型實(shí)驗(yàn)
為驗(yàn)證轉(zhuǎn)向關(guān)節(jié)在轉(zhuǎn)向運(yùn)動(dòng)模塊作用下連接線縮短長(zhǎng)度Δl與彎曲轉(zhuǎn)向角度θ之間的關(guān)系,進(jìn)行了如圖9所示的連續(xù)彎曲轉(zhuǎn)向?qū)嶒?yàn)。圖9a~圖9h分別代表連接線縮短10~80 mm距離對(duì)應(yīng)的彎曲狀態(tài),增量為10 mm。
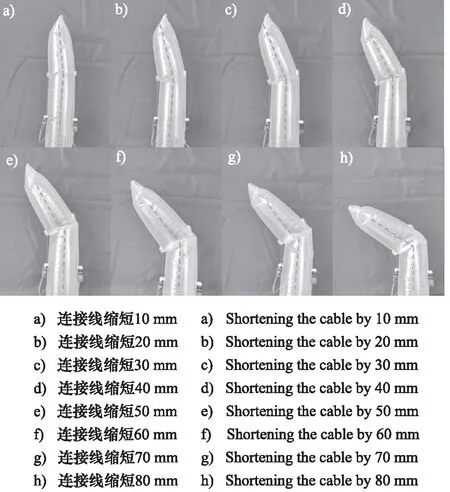
圖9 轉(zhuǎn)彎模型的驗(yàn)證Fig.9 Verification of steering model
由式(1)可求得各彎曲狀態(tài)對(duì)應(yīng)的理論彎曲角度。通過對(duì)各彎曲狀態(tài)轉(zhuǎn)向角度的測(cè)量,可以得到連接線縮短長(zhǎng)度和轉(zhuǎn)向角度的關(guān)系,如圖10所示。當(dāng)連接線縮短80 mm時(shí),彎曲角度可達(dá)58.8°,理論彎曲角度和實(shí)驗(yàn)測(cè)得的角度吻合度較高,偏差較小,連接線縮短長(zhǎng)度和彎曲角度近似線性關(guān)系,驗(yàn)證了轉(zhuǎn)向關(guān)節(jié)彎曲轉(zhuǎn)向幾何特性分析的正確性。
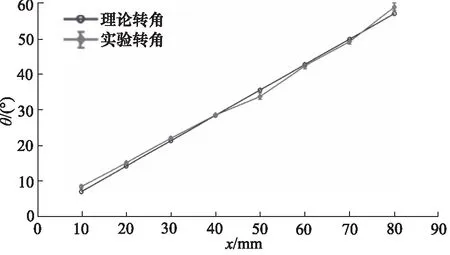
圖10 轉(zhuǎn)彎模型的理論與實(shí)驗(yàn)曲線
4.2 多障礙環(huán)境連續(xù)生長(zhǎng)實(shí)驗(yàn)
空間站內(nèi)部復(fù)雜的空間環(huán)境需要尖端生長(zhǎng)型軟體機(jī)器人具有生長(zhǎng)運(yùn)動(dòng)、轉(zhuǎn)向避障以及多形態(tài)靈活變換能力,為此搭建了多障礙環(huán)境來測(cè)試機(jī)器人面對(duì)復(fù)雜環(huán)境的適應(yīng)能力。圖11為尖端生長(zhǎng)軟體機(jī)器人在障礙環(huán)境下連續(xù)生長(zhǎng)運(yùn)動(dòng)的過程。設(shè)計(jì)并制作了四關(guān)節(jié)生長(zhǎng)機(jī)器人,在生長(zhǎng)測(cè)試中,其生長(zhǎng)運(yùn)動(dòng)速度可達(dá)300 mm/s 以上,相比其他類型的軟體機(jī)器人具有更高的運(yùn)動(dòng)效率;在多障礙環(huán)境中運(yùn)動(dòng)時(shí),機(jī)器人憑借其尖端轉(zhuǎn)向的可調(diào)性和可逆性,面對(duì)障礙靈活躲避并試探性地選擇出最佳路徑,最終到達(dá)指定位置或目標(biāo)物體,驗(yàn)證了本研究的生長(zhǎng)型軟體機(jī)器人具有復(fù)雜環(huán)境長(zhǎng)遠(yuǎn)距離運(yùn)動(dòng)的能力。
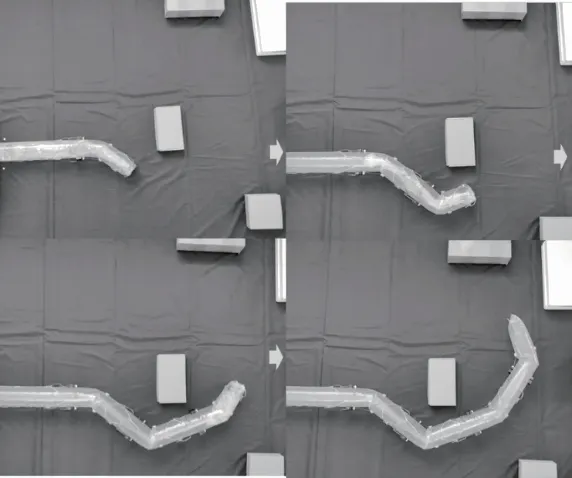
圖11 多障礙環(huán)境避障實(shí)驗(yàn)Fig.11 Obstacle avoidance experiment in multi-obstacle environment
5 結(jié)論
設(shè)計(jì)了一種多自由度仿“藤蔓”尖端生長(zhǎng)型軟體機(jī)器人,其柔性特征使其能被動(dòng)變形來提高環(huán)境順從性和適應(yīng)性,避免了剛性沖擊。提出了機(jī)器人的運(yùn)動(dòng)方案和控制方案,建立了此運(yùn)動(dòng)方式下運(yùn)動(dòng)學(xué)模型并進(jìn)行了運(yùn)動(dòng)仿真和實(shí)驗(yàn)研究,得出的結(jié)論如下:
(1) 機(jī)器人尖端外翻生長(zhǎng)方式打破了傳統(tǒng)機(jī)器人運(yùn)動(dòng)模式,使其可脫離表面實(shí)現(xiàn)運(yùn)動(dòng),適合空間站失重環(huán)境,同時(shí)該方式提高了主體收納比,實(shí)現(xiàn)了機(jī)器人的小型化和輕量化;
(2) 提出的主體表面的舵機(jī)線驅(qū)動(dòng)轉(zhuǎn)彎方案實(shí)現(xiàn)了機(jī)器人的尖端轉(zhuǎn)向,單個(gè)轉(zhuǎn)彎具備可調(diào)性和可逆性,多個(gè)轉(zhuǎn)彎之間相互解耦,大大提高了軟體機(jī)器人的運(yùn)動(dòng)可控性和靈活性;
(3) 建立了相應(yīng)的運(yùn)動(dòng)學(xué)模型,以90%以上的精度預(yù)測(cè)了機(jī)器人轉(zhuǎn)彎角度,提高了其控制精度;且在有限元仿真中,建立的機(jī)器人模型可以根據(jù)需求控制不同形態(tài)之間的協(xié)調(diào)變換,驗(yàn)證了運(yùn)動(dòng)轉(zhuǎn)向方案的可行性;
(4) 制作了四關(guān)節(jié)軟體機(jī)器人樣機(jī),測(cè)得其生長(zhǎng)速度可達(dá)到300 mm/s,具有極高的運(yùn)動(dòng)效率,并通過多形態(tài)變換和障礙環(huán)境下的連續(xù)生長(zhǎng)運(yùn)動(dòng)實(shí)驗(yàn),驗(yàn)證了尖端生長(zhǎng)型軟體機(jī)器人具有復(fù)雜環(huán)境長(zhǎng)遠(yuǎn)距離運(yùn)動(dòng)的優(yōu)勢(shì)和性能。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
南大法學(xué)(2021年3期)2021-08-13 09:22:32
小讀者(2021年2期)2021-03-29 05:03:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
華人時(shí)刊(2019年13期)2019-11-17 14:59:54
文苑(2018年22期)2018-11-19 02:54:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
紅領(lǐng)巾·萌芽(2016年1期)2016-09-10 07:22:44
自然與文化遺產(chǎn)研究(2016年2期)2016-05-17 05:53:59
