基于魚群算法的變電站巡檢機器人路徑規劃研究
2022-02-20 09:06:30陳曌
通信電源技術 2022年23期
陳 曌
(湖北省電力裝備有限公司,湖北 武漢 430000)
0 引 言
變電站在整個電力系統中承擔著電能轉換的任務。由于變電站是電力系統正常運轉的關鍵,使得對變電站的日常巡檢工作成為保障變電站安全高效運行的必要任務。傳統的巡檢方式要依靠大量的人力資源來完成,并且所處工作環境包含電磁輻射和部分戶外的復雜氣象條件,巡檢任務的完成質量需要依靠具備一定經驗的巡檢人員[1,2]。傳統變電站巡檢方式不僅會增加成本,而且巡檢質量參差不齊。隨著巡檢機器人在變電站巡檢工作中的應用,巡檢工作的難度和成本大大降低,能夠保障變電站工作人員的人身安全。巡檢機器人在變電站的運行要考慮到機器人的避障能力,同時為了保障機器人在巡檢工作時的效率和縮短巡檢時間,對機器人巡檢路線的規劃也極為重要[3-5]。
目前,有諸多學者對于變電站中機器人的路徑規劃有著一定的研究。張永濤等人采用枚舉法對待配對節點進行匹配,并利用Fleury算法得到變電站全站全巡最佳路線[6]。對于待配對節點較多的情形,先采用K-means聚類算法將奇度節點根據其所在空間位置進行聚類分析,再利用枚舉法對待配對節點分區域進行匹配優化。陳瑋光等人基于改進遺傳算法,對機器人巡檢的路線進行優化,優化過程中將變電站平面圖網格化處理便于計算,計及最高尋址效率,以行駛距離最短為優化目標[7]。路浩等人提出了一種基于改進蟻群算法的路徑優化方法和基于貪婪思想聚類的巡檢停靠點選取方法,通過蟻群算法迭代獲得機器人的最優巡檢路徑、巡檢停靠點序列以及各停靠點對應的測溫點集[8]。楊希磊等人提出了目標為巡檢時間最短的變電站巡檢機器人功率分配模型,并使用粒子群算法進行模型求解[9]。徐明提出了一種基于改進深度強化學習的變電站機器人巡檢路徑規劃方法。結合巡檢機器人的運動模型,設計深度強化學習的動作和狀態空間。將深度強化學習網絡與人工勢場相結合,重新構造深度強化學習的獎勵函數,優化卷積神經網絡結構[10]。
針對巡檢機器人路徑規劃不佳的問題,通過一種魚群算法,建立柵格化的變電站圖,通過將機器人路徑尋優問題轉化為對魚群覓食模擬和魚群自身的生物行為,包括聚群行為、追尾行為以及隨機行為進行最優解的求解。
1 路徑規劃模型
對于在路面上行進的機器人,可以將行進的場景簡化為一個二維環境。通過柵格化將機器人實際工作的環境構建成一個柵格矩陣地圖。柵格化的基本原理在于通過一個由機器人自身大小定義的二位單位柵格均勻構建與實際場地面積大小一致的柵格圖。柵格化做法的目的是將實際的地圖進行數字化,在柵格化后的地圖中可標記出機器人潛在可行的運動路徑和場地內實際存在的障礙物。在柵格化后的地圖中給出目標機器人的出發點和目的地,通過算法形成多個由柵格號構成的路徑。
柵格化操作后的變電站地圖如圖1所示。圖中的黑色部分即為實際地圖中障礙物所在的位置,在數字化表示中將被記為1;白色部分為機器人可行區域,會被記為0。
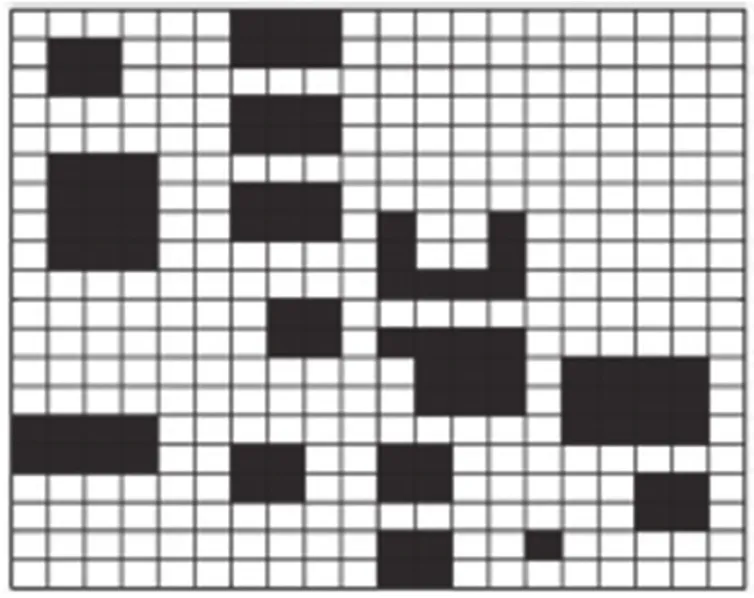
圖1 柵格化操作后的變電站地圖
為了表示機器人極大的行進自由度,定義機器人的行進方向。機器人的行進方向為8個方向,這種方式被稱為八叉樹搜索策略。以柵格圖中的一個柵格為例,機器人在該柵格上可向8個方位的下一個柵格進行移動。機器人行進方向如圖2所示。
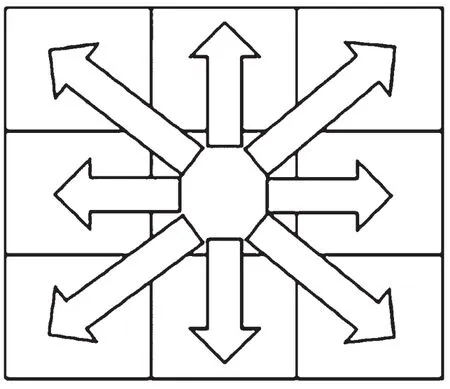
圖2 機器人行進方向
在柵格化后的矩陣中,每個柵格將會有自己的編號。如果矩陣為S×S,則矩陣最左上方的柵格記為1,該柵格往右則記為2,以此類推逐行進行標號直至最右下角的S2。當確定柵格圖的坐標原點,后就可以計算出某個柵格點的距離。其計算公式為

式中:n為需要計算的柵格點;a為單位柵格的長度;x、y為所要計算的柵格的坐標位置。計算出某個柵格點的位置之后,就可以通過基本的距離公式計算出任意2個柵格點之間的距離,其公式為

2 魚群算法
魚群算法通過魚的個體行為和覓食本能進行建模,從而得出一個生物模擬的尋求最優解的方法。首先需要定義魚群的狀態集合X=(x1,x2,…,xn),在整個集合中的每一個元素,即xi=(i=1,2,…,n)為魚群中每個參與尋優的個體魚。該方法的目標函數計算值是對每條魚所處位置的食物濃度進行考量,則記為Y=f(X)。對于每個魚個體的定義還有魚個體的視野范圍v、魚個體所能移動的最大距離s,對于魚群則有魚群的聚集程度δ和魚群的最大試驗次數nt,其中2條魚之間的歐氏距離為|Xj-Xi|,j表示為第j條魚,i表示為第i條魚。下面描述魚的行為。
2.1 覓食行為
某條魚的位置可描述為Xi,其對應的食物濃度為Yi。依照魚的視野范圍可以搜尋到一個新的位置Xj,并且對應的食物濃度為Yj。那么新位置的計算方式為

式中:v代表魚個體的視野范圍。
當滿足新位置所搜尋到的食物狀態要比前一個位置的好,即表達式Yi<Yj,那么在最大實驗次數nt范圍內,魚會向新位置前進。計算公式為

式中:Xit為在時刻t下第i魚的位置。
如果在實驗次數限制的范圍中,魚個體并沒有找到比前一個狀態更好的狀態量,那么魚會進行隨機行為。
2.2 聚群行為

如果聚集中心的狀態不滿足食物要求和魚類數量要求,那么魚群會四散覓食。
2.3 追尾行為

否則,魚群還是會四散覓食。
2.4 隨機行為
隨機行為是魚類最基本的行為,在數學表示上有效避免局部最優,原因在于魚個體可以廣泛尋找同類和食物。隨機行為的實現比較簡單,就是在視野中隨機選擇一個狀態并向那個方向移動,即

3 實驗仿真分析
柵格化之后的地圖大小為20 mm×20 mm,依據柵格地圖的大小將位置起點設置為(20,1)。放置魚群大小為N=50,魚的視野范圍為v=20,魚群的聚集程度設置為δ=0.67,最大實驗次數和迭代次數分別為8次和100次。
在該設置下得到的規劃路徑如圖3所示。
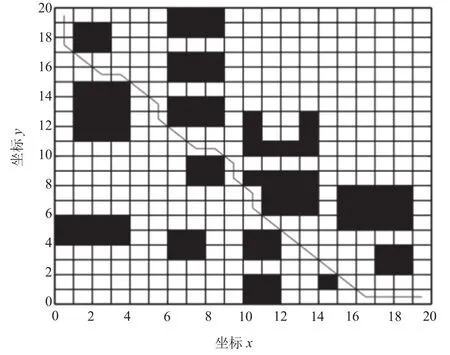
圖3 規劃路徑圖
本文的魚群算法能夠很好地進行機器人的路徑規劃,在諸多路徑中選取到了最優路線。比較粒子群算法和魚群算法,算法迭代過程如圖4所示。由圖4可知,魚群算法在迭代約30次時,算法趨于穩定,而傳統的粒子群算法在迭代進行到約60次才趨于穩定,因此魚群算法在迭代次數上要優于粒子群算法。
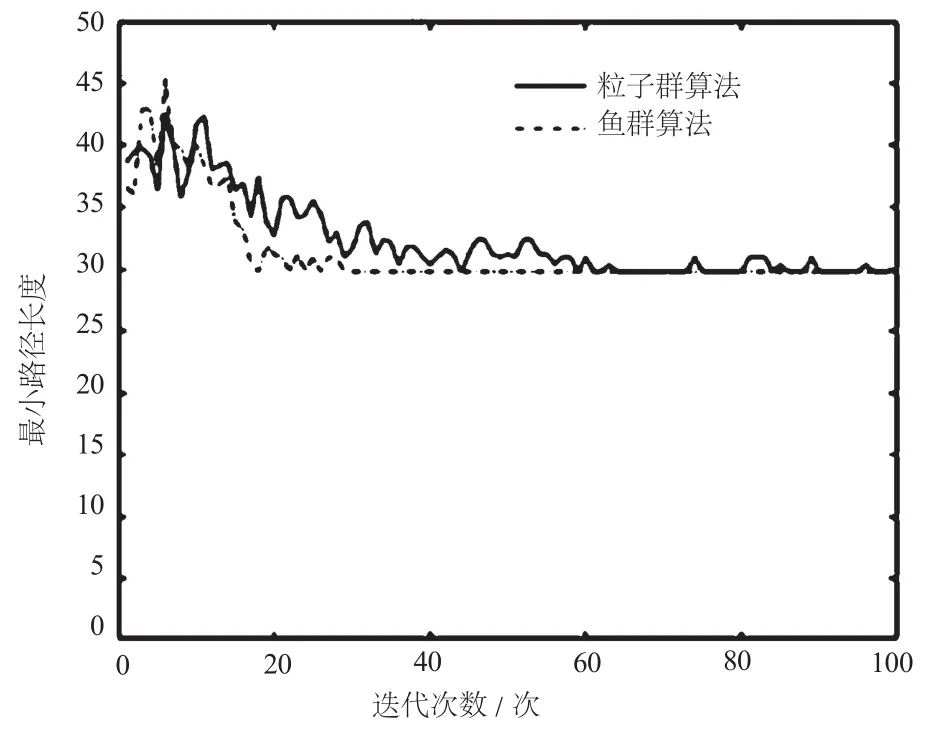
圖4 算法迭代比較
4 結 論
通過建立柵格化的變電站圖,將機器人路徑尋優問題轉化為對魚群覓食模擬和魚群自身的生物行為,包括聚群行為、追尾行為和隨機行為進行最優解的求解。通過比較與粒子群算法,本文的魚群算法能夠很好地進行路徑規劃,并在求解性能上要優于粒子群算法,有效實現了算法優化。
猜你喜歡
電子制作(2018年8期)2018-06-26 06:43:34
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
電子制作(2017年8期)2017-06-05 09:36:15
中國衛生(2016年2期)2016-11-12 13:22:16
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
中國工程咨詢(2016年4期)2016-02-14 07:28:28
河南電力(2015年5期)2015-06-08 06:01:45