基于測控基帶備機的防錯鎖方法改進
2022-02-20 13:06:46韓雷岳世磊謝承伯李彬李魁杰
電子測試 2022年3期
韓雷,岳世磊,謝承伯,李彬,李魁杰
(西安衛星測控中心,陜西西安,710043)
0 引言
某型測控站在測控活動過程中,當測控基帶主機A機完成雙捕后,發現基帶備機B機載波錯鎖。在后續測控活動中對此載波錯鎖現象進行了重點關注,發現雙捕完成后,備機有一定概率出現錯鎖。縱觀多次錯鎖現象,載波錯鎖信號有一定隨機性,不能單純界定為外界干擾引起。為保證測控基帶在測控活動過程中,能夠穩定準確鎖定目標信號,確保信號接收質量,遂需研究測控基帶備機雙捕過程中防錯鎖的方法。
1 原理及錯鎖原因分析
1.1 接收機載波鎖定原理
標準TT&C接收機原理如圖1所示,下行信號經天線、低噪聲放大、下變頻后,測控和路中頻信號送測控基帶分機:首先由頻率快速捕獲(頻率引導)單元完成載波頻率及載波頻率變化率測量,實時將測量結果送主接收機載波鎖相環,輔助載波環捕獲跟蹤,載波鎖定后解調出遙測副載波及測距信號,送遙測單元及測距單元。[1]

圖1 標準TT&C接收機原理框圖
當雙捕流程開始時,調制器以預設的掃描速率進行頻率掃描,基帶監控軟件會根據雙向光行時進行延時后將頻率掃描參數信息發送給接收機和頻率捕獲模塊,作為預報的先驗信息輔助頻率捕獲模塊進行快速正確的捕獲,從而輔助接收機中的載波環路對載波進行捕獲和鎖定。
載波環路在頻率捕獲單元提供的多普勒信息輔助下對載波進行捕獲后會進行防錯鎖判斷。鎖定后的載波環路除非再次失鎖,否則不會再對頻率捕獲單元的捕獲結果進行判定和使用處理。頻率捕獲單元和載波環路單元的具體工作流程如下所述。
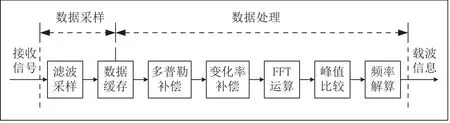
圖2 頻率捕獲單元結構原理流程圖
1.1.1 頻率捕獲單元工作流程
頻率捕獲單元結構原理流程見圖2,首先根據下發的多普勒信息輔助數據對信號進行濾波采樣和下變頻處理,輸出零中頻信號寫入數據緩存空間;然后進行數據處理,對采樣數據進行載波多普勒頻率及其變化率的雙重補償,多輪次地復用FFT資源;最后對FFT后的數據進行頻譜峰值比較,得出頻譜峰值進行頻率解算,最終得到當前時刻的載波多普勒頻率值[2]。
1.1.2 接收機工作流程
接收機中載波環根據頻率捕獲模塊給的多普勒信息來設置環路中心頻率進行跟蹤。目前設計狀態下,頻率捕獲模塊輸出的多普勒信息的取用分兩種情況:
(1)若載波環失鎖,立即取當前的捕獲結果來設置環路中心頻率,并對載波環進行復位。
(2)若載波環鎖定,則判斷環路錯鎖指示信號是否有效,若有效,則立即取當前的捕獲結果來設置環路中心頻率,并對載波環進行復位;否則,保持上一次的中心頻率值,不做其他操作。
環路錯鎖判決只在環路從失鎖到鎖定的過程中判決1次,一直鎖定后將不進行判決(不進行判決時錯鎖指示信號無效)。環路錯鎖判決過程如下:
(1)計算當前頻率捕獲模塊輸出的多普勒和載波環輸出的多普勒的差值;
(2)判斷兩者的差值是否大于設定的門限;
(3)連續統計3次,若有兩次差值大于門限,則認為環路錯鎖,錯鎖指示信號有效;否則,認為環路正常鎖定,錯鎖指示信號無效。
1.2 錯鎖原因分析
在測控基帶主機進行雙捕時,接收機和頻率捕獲單元會在調制器的掃描信息輔助下對載波頻率進行正確的捕獲和跟蹤,然而由于測控基帶備機并不發出上行信號和起掃,因此其接收機和頻率捕獲單元無法獲取掃描信息預報。鑒于系統接收機和頻率捕獲模塊在無掃描信息輔助下所能適應多普勒變化率有限(舉例為A)當外界信號多普勒及變化率小于等于A時,捕獲單元能捕獲到正確的多普勒值及變化率,從而引導接收機正確捕獲跟蹤,當外界信號多普勒及變化率大于A且無預報信息時,捕獲單元將無法捕獲到正確的多普勒值以及變化率,不能輔助載波環路對載波頻率進行正確的捕獲跟蹤。
由于掃描過程中信號頻率一直變化,當頻率捕獲單元捕到頻譜中的一個信號頻率時,并引導載波鎖相環進行鎖定。當載波環路跟蹤到的頻率與頻率捕獲單元的捕獲結果恰好滿足判錯鎖條件時,載波環路便鎖定在了該錯誤的頻率上。由于一旦鎖定只要不再次失鎖則捕獲將鎖定出的頻率與捕獲單元的捕獲結果進行比較判斷,因此即便掃描結束后,頻率捕獲單元捕獲到了真實正確的載波信號后,載波環路也會一直鎖定在之前的錯誤頻率上。[3]
2 模擬測試試驗及軟硬件修改驗證
2.1 模擬測試試驗
針對測控基帶備機錯鎖現象,進行了多次反復測試,主機均未出現錯鎖。具體模擬測試試驗環境如圖3所示。其中基帶A用于模擬指定場景下的主機,基帶B用于模擬指定場景下的備機。基帶A機的上行信號經信道模擬器模擬上行鏈路環境后送入聯試應答機,經聯試應答機轉發后模擬下行鏈路環境并加入噪聲后功分兩路分別輸入基帶A機和基帶B機。

圖3 模擬測試試驗環境框圖
進行了50次雙捕流程試驗,統計雙捕完成后基帶A機和基帶B機的鎖定是否正確。50次試驗中,基帶A機全部正確鎖定,基帶B機出現18次錯鎖。
2.2 軟硬件修改驗證
針對測控基帶備機錯鎖問題,進行如下軟硬件修改及驗證:
(1)修改備機模式下軟件邏輯流程,即當基帶處于備機狀態時,“判錯鎖”開關打開。
(2)修改測控接收機DSP程序代碼邏輯(見圖4),將備機的捕獲和載波環路工作方式設置為一直判錯鎖,這樣可以保證即使在掃描過程中有錯鎖可能,在掃描信號回零后,備機能夠正確鎖定。

圖4 DSP程序代碼邏輯修改前后對比
(3)新增基帶監控與接收機之間的主備機狀態接口,對基帶監控軟件進行適應性調整。
修改完成后進行了50次雙捕流程試驗,測控基帶B機(備機)在雙捕完成后均未出現錯鎖。
3 結論
本次測控基帶軟硬件修改,從根本上解決了,當掃描速率超過了頻率捕獲單元的捕獲能力時,頻率捕獲單元無法捕獲到正確的多普勒值以及變化率,也不能輔助載波環路對載波頻率進行正確的捕獲跟蹤,導致測控基帶備機錯鎖的問題。既是對測控基帶備機雙捕過程中防錯鎖的方法改進優化的有益嘗試,也為復雜電磁環境下測控活動的正常捕獲跟蹤提供有效保障,對于其他測控裝備性能改進也有一定的借鑒意義。
