基于語音識別的智能分類垃圾桶
2022-02-19 11:37:42徐云平
電子測試 2022年1期
徐云平
(福建無線電設備有限公司,福建三明,365001)
0 引言
隨著人們生活水平的提高,垃圾處理問題日益凸顯,已經成為國家甚至全球不可回避的問題。現在越來越多國家開始實施垃圾分類的政策,由于居民分類的意識和能力的欠缺,而是當下垃圾的類型繁雜而多,有些垃圾分類邊界模糊,容易引起錯誤投放,增加了對垃圾進行分類的難度,推廣垃圾分類阻力大、難度高、準確性偏低[1]。因此,應提高垃圾分類的自動化水平,以解決人為垃圾類不準確、耗時較長等問題[2]。實現垃圾識別與智能分類就顯得非常必要,其中基于圖像識別與深度學習的垃圾分類研究比較多。
李美錕[3]等提出基于GPU深度學習的智能垃圾桶設計,該垃圾通具有分類準確度高、使用簡單便捷等優點。王偉杰[4]等采用機器人視覺系統,采集圖片信息,利用Yolov4目標檢測算法,將垃圾進行智能分類,并將其放入自帶的相應垃圾桶中。楊皓文[5]等基于樹莓派利用CNN神經網絡算法訓練的模型數據對讀取的圖像進行分類檢測,通過控制電機將垃圾送入其所屬分類的收納桶中。基于機器視覺與機器視覺算的的智能分類垃圾桶容易受環境影響識別準確率不夠高等缺點,本文提出了一款基于語音識別的智能分類垃圾桶的設計,該垃圾桶通過語音識別與控制相應的垃圾桶倉門的開閉達到垃圾的自動識別、智能分類的效果。
1 智能分類垃圾桶總框架
本系統在設計時考慮到系統功能的實用性及成本的可行性,采用了模塊化設計思想,將系統分為硬件系統設計和軟件系統設計,最終實現垃圾桶的智能分類要求。該硬件系統主要包括語音識別模塊、語音播放模塊、垃圾分類處理模塊、控制模塊、紅外測距模塊和電源管理模塊等,其系統總框圖如圖1所示。在整個智能分類垃圾桶系統中,單片機是整個系統的核心控制器,整個分類系統都是在它的控制下完成工作的,并且單片機為系統提供外部接口,如LED燈、按鍵、數據采集電路等。首先在語音識別模塊沒有接收到喚醒指令的時候,整個系統處于待機狀態,當其接收到“垃圾桶”的喚醒指令后通過語音播報作出反饋和說出對應垃圾后語音識別檢測語音輸入時和完成垃圾桶動作行為的播報,經過STM32芯片中心控制模塊的分析處理后啟動外圍運動控制電路模塊,舵機收到發聵做出相應開蓋、關蓋等相關動作,垃圾丟進垃圾桶時,選擇投入桶蓋打開垃圾的種類。
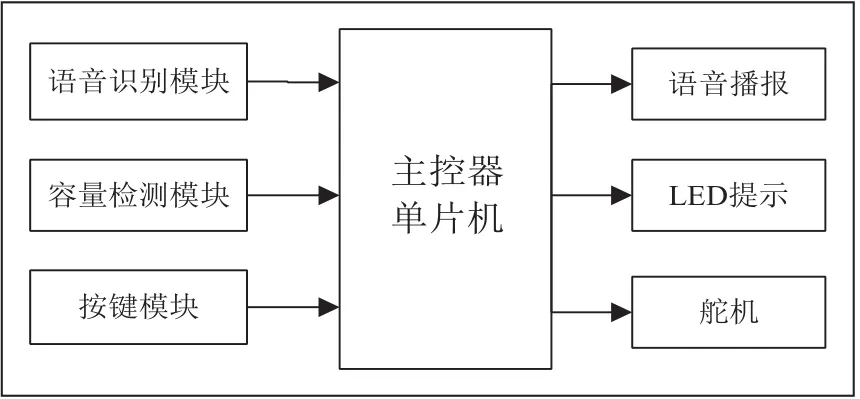
圖1 智能分類垃圾桶的系統框圖
2 硬件系統設計
2.1 主控器
本設計控制模塊采用STM32F103C8T6單片機,該單片機提供外接的I/O口和完成對來自其他模塊的信號處理和輸出控制,完成垃圾分類全過程的監測和控制,其最小系統如圖2所示,包含電源電路、復位電路和時鐘電路與簡單的外圍電路。電源電路通過EM6211-33電壓轉換芯片將外部電源提供的5V電源轉換為3.3V電源為單片機供電。

圖2 STM32F103C8T6 最小系統
2.2 語音識別模塊
智能分類垃圾桶語音識別模塊采用LD3320語音識別芯片,其內部帶有閃存,最多可支持五十個識別條目,可以簡單、快速實現語音識別、聲控、人機對話功能。該語音識別芯片具有強大的語音識別特征庫,識別功能靈敏、短距離內識別誤差小[6]。該芯片是非特定人語音識別,不需要用戶事先訓練和錄音,且識別的關鍵詞語列表是可以任意動態編輯的。語音識別模塊LD3320與單片機之間通過并行方式進行連接,如圖3所示,其中T_TX引腳與STM32F103C8T6的31號引腳相連、Y_RX引腳與單片機的30號引腳相連。
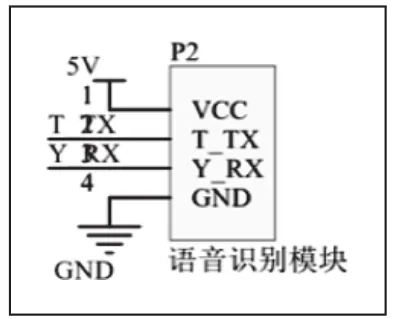
圖3 語音識別模塊的電路連接
2.3 容量檢測模塊
該垃圾桶主要通過檢測垃圾桶內垃圾到桶蓋的距離來進行容量檢測,并判斷是否達到垃圾需要清理的要求。采用紅外測距模塊進行容量檢測,其電路如圖4所示,紅外模塊的輸出OUT腳接在單片機的26號引腳上。
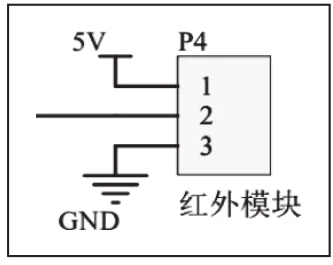
圖4 紅外模塊的電路設計
2.4 語音播報模塊
語音播報模塊選用JQ8400語音播報模塊,該模塊包含專用于音頻解碼的IC,可以有效保證音頻的音質。語音播報模塊采用5V供電,在使用時將喇叭兩端分別接在SP+和SP-引腳,BUSY作為模塊工作接口,接在控制器的通用I/O口PA1上,RX和TX為模塊的接收和發送端口,分別連接在PA2和PA3口上。
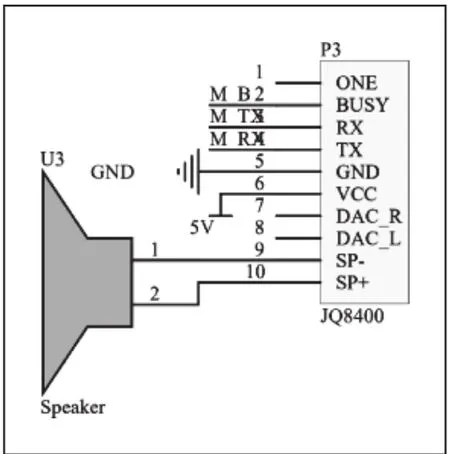
圖5 語音播報模塊JQ8400的電路連接
2.5 運動控制電機
智能垃圾桶桶蓋開閉控制采用模擬舵機SG90進行控制,SG90舵機通過橙色信號線進行PWM輸入,其接線圖如圖6所示。

圖6 SG90 舵機電路
3 軟件設計
3.1 主程序設計
智能分類垃圾桶的主程序主要包括語音識別模塊、桶蓋控制模塊、容量檢測模塊、按鍵模塊和語音播報模塊。
按鍵模塊用于控制桶蓋的開閉控制;語音識別模塊主要用于垃圾分類識別并控制相應的垃圾桶開閉與語音播報;容量檢測模塊檢測垃圾桶內的垃圾是否裝滿,如裝滿LED就閃爍進行提示相關人員。其主流程圖如圖7所示。
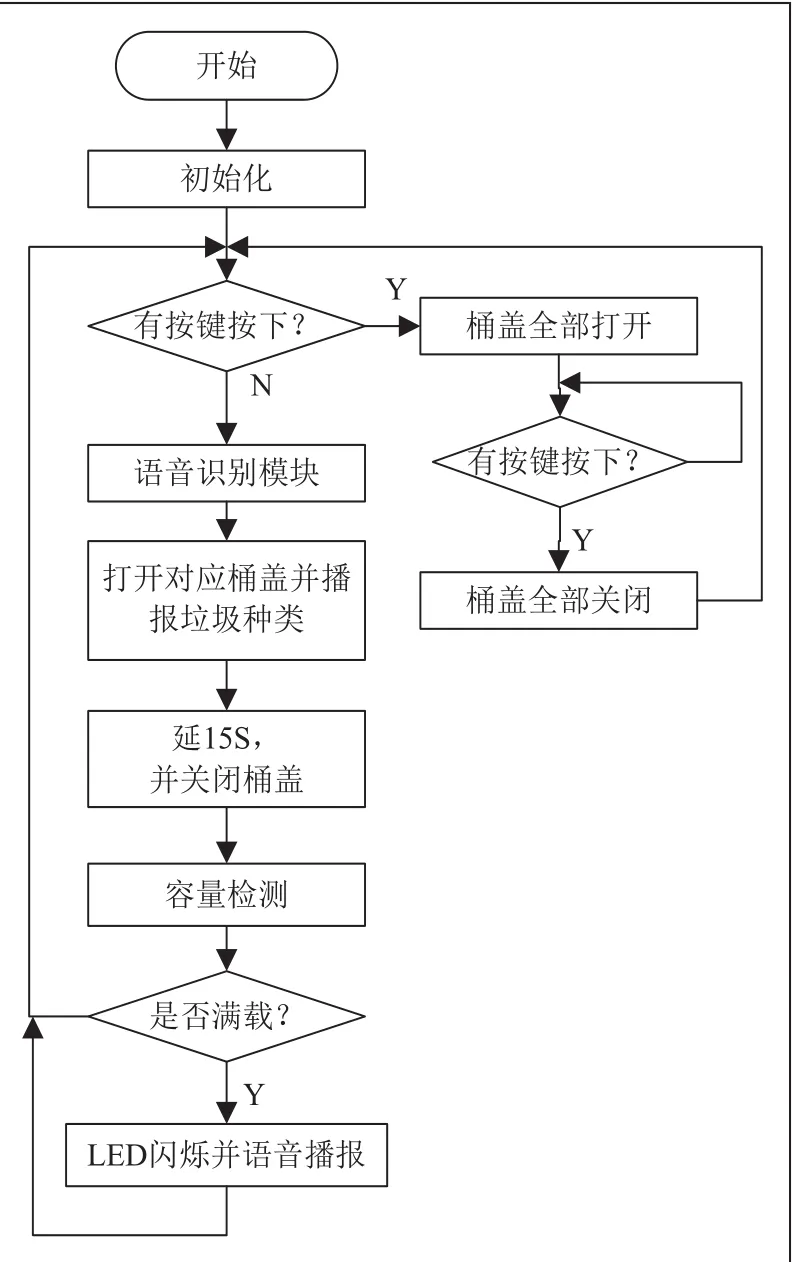
圖7 主流程圖
3.2 語音識別模塊
語音識別模塊主要包含對語音的采集和判斷。要能夠實現對控制語音命令進行識別和垃圾分類庫的對比,實現對于垃圾桶的智能化語音識別控制,完成遠距離非接觸式信號的獲取和傳輸。智能分類垃圾桶通過語音識別模塊采集并識別用戶發出的指令。設置了一級喚醒指令和二級控制指令,本系統的一級喚醒指令為“小慧”,二級指令為常見的垃圾名稱。當垃圾桶接收到語音“小慧”時,進入待命狀態,等待二級控制指令進行相應的動作,延時15S沒有二級控制指令則返回到待機狀態。
4 實驗驗證
為了驗證智能分類垃圾桶的有效性,本文分別在2m、5m、10m和15m四個不同距離,由非特定的3人(編號A、B、C)在不同的環境下對一級喚醒指令和二級控制指令各進行10次測試。
系統上電后,3人發出“小慧”的喚醒指令,除了在15m嘈雜環境時出現2次異常,其余情況都能正常喚醒并使指示燈亮起,進入二級控制指令檢測與識別狀態;15s無二級控制語音指令,指示燈熄滅返回到待機狀態。
對二級控制語音進行10個不同的垃圾名稱語音進行50次反復試驗,將正確結果取均值,其測試結果如表1所示。
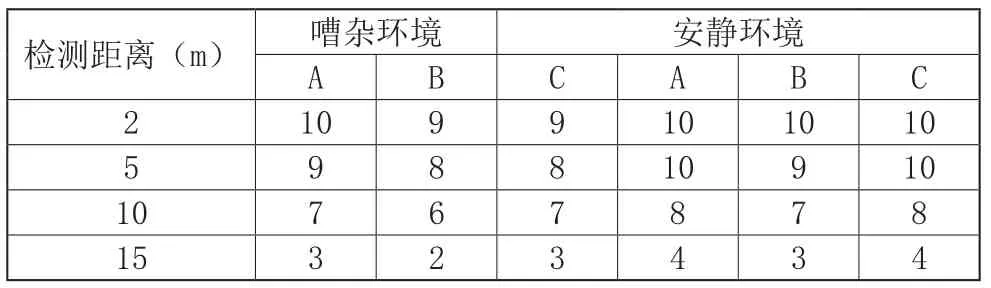
表1 二級語音測試結果
通過上表可得:離垃圾桶越遠,語音識別垃圾分類的準確率越低,語音識別芯片的允許范圍大概為15m;不同的測試人員對識別率也有影響;嘈雜環境對語音識別也有一定的干擾。
5 結語
本文設計了一款基于語音識別的智能分類垃圾桶,該垃圾桶以STM32F103C8T6為主控器,通過語音識別模塊對垃圾進行分類檢測,將檢測結果發送至單片機控制舵機打開對應的桶蓋,并進行語音提醒與語音播報;每次垃圾投放后對相應垃圾桶進行滿載檢測,當達到一定容量時,進行語音播報與指示燈提示工作人員進行清理。通過不同的非特定測試人員、不同距離和不同環境對智能分類垃圾桶進行測試驗證其智能垃圾分類的準確性和有效性。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06