零部件研發(fā)風險識別與分析
2022-02-19 10:12:34李春關慶齡喻修其許瑩
機械工程師 2022年2期
李春,關慶齡,喻修其,許瑩
(中海油田服務股份有限公司,河北 三河 065201)
0 引言
隨著國內(nèi)制造業(yè)的蓬勃發(fā)展,石油行業(yè)機械零部件自主研發(fā)數(shù)量急劇增加。在研發(fā)中應做好風險辨識與分析以保證研發(fā)效果。本文以船位儀為例闡述零部件研發(fā)的風險識別與分析過程。
船位儀應用在半潛式鉆井平臺,其功能是在平臺作業(yè)過程中,利用水聲技術監(jiān)視平臺與井口的水平方向相對位移,為船長操船提供依據(jù)。船位儀系統(tǒng)功能多、技術復雜,涉及到多個技術領域,如深海低功耗應答器設計、寬帶超短基線目標定位技術、超短基線陣設計及防海洋生物設計技術、信號傳輸抗干擾技術、超短基線陣校準技術等。進行該項目的風險分析與評估是保證項目研制成功的必要條件之一,可為項目研制進程中的各種管理決策提供參考,又可通過預見風險從而實施風險規(guī)避,進而在制造、生產(chǎn)、維修保障等各個環(huán)節(jié)中,能有效地控制或消除風險,達到降低損失、控制成本的目的。
1 風險評估
1.1 風險辯識
零部件研制風險辨識采用分解分析法結合流程分析法完成。以船位儀為例,先將船位儀分解為零部件,再按研制應用流程對風險進行辨識和分析,并制定預防措施。分解分析法是指將一復雜的事物分解為多個比較簡單的事物,將大系統(tǒng)分解為具體的組成要素,從中分析可能存在的風險及潛在損失的威脅。船位儀系統(tǒng)按工程及模塊分解為深海應答部件、信號接收處理部件、超短基線陣部件、后置處理顯控部件等幾部分,如圖1所示。
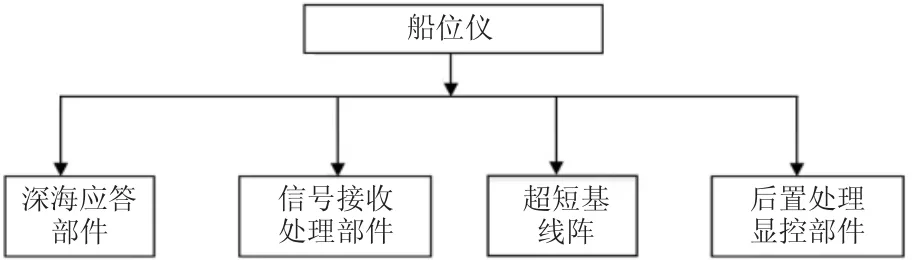
圖1 主要零部件構成
流程分析法是指在研制投產(chǎn)過程中,從設計開發(fā)到成品產(chǎn)出,通過一定的設備按順序連續(xù)地進行加工的過程。該種方法強調(diào)根據(jù)不同的流程,對每一階段和環(huán)節(jié)逐個進行調(diào)查分析,找出風險存在的原因。船位儀系統(tǒng)總體分成設計階段、試制階段、實驗使用階段、維修保障階段等4個流程。項目的風險區(qū)或風險技術過程考慮如表1所示。根據(jù)其使用的條件、環(huán)境、性能指標要求進行分析,收集風險信息,總結出可能對系統(tǒng)或功能組件產(chǎn)生風險的事件或因素,并研究采取應對措施[1]。

表1 項目的風險區(qū)或風險技術過程
1.2 風險分析及糾正
1.2.1 設計階段風險分析
1)分析方法。完成分解及流程拆解后,在實際研發(fā)過程中,通過風險辯識,認為該系統(tǒng)有10個風險。采用專家技術定性評估法對上述風險進行分析評估[2],同時制定糾正預防措施。
2)寬帶超短基線目標定位方法風險。風險描述:在進行超短基線目標定位時,如果方法選取不當,信號抗干擾能力差,在深海復雜條件下,信噪比不是太好時,難以保證信號檢測和相位估計的精度;同時為克服相位跨周期、產(chǎn)生相位估計模糊,必須通過增加水聽器基元才能解決,使基陣更加復雜。糾正措施:在超短基線定位中,采用寬帶信號進行定位是近年來發(fā)展的重要方向,其原理為利用基陣陣元間的時延差進行定位。寬帶信號抗干擾能力強,同時通過提高采樣率和相關峰時延內(nèi)插技術,在一定的信噪比條件下可以實現(xiàn)兩路信號時延差的精確估計,精度優(yōu)于采樣周期的一半,本系統(tǒng)擬采用寬帶超短基線目標定位技術[3]。
3)水下部件可靠性風險。風險描述:應答器和超短基線陣等設備置于水下長期使用,因此系統(tǒng)電子部件的可靠性和水密桶等機械部件的水密特性特別重要,一旦出現(xiàn)問題,將給整個系統(tǒng)造成影響。糾正措施:從每一級組部件、每一個質(zhì)量環(huán)節(jié)嚴格抓起,充分認識到使用環(huán)境的惡劣性給系統(tǒng)帶來的影響。電子器件按可靠性要求進行老化篩選,開展系統(tǒng)的環(huán)境試驗,新研制的應答器電路和超短基線陣內(nèi)電路要體積小巧、可靠性高,滿足海上長期顛簸環(huán)境下及深水條件下的使用。
4)信號抗干擾風險。風險描述:鉆井平臺上工作環(huán)境復雜,信號的干擾包括噪聲干擾和電磁干擾。糾正措施:a.工作頻率的確定。應充分考慮平臺的工作環(huán)境和海洋的聲學環(huán)境。由于低頻段受到鉆井機械等設備的強噪聲源的干擾,工作頻段的選取應避開該頻段,盡可能選高端頻率。而高頻段又對信號傳輸不利,特別在海水中,隨著頻率的升高,信號的衰減明顯加大,因此高端又受到信號傳輸?shù)南拗啤>C合兩方面因素,選擇20 kHz左右的頻段作為工作頻段較為合適[4]。b.環(huán)境噪聲干擾。對平臺上的機械設備施工和周圍船只航行帶來的噪聲干擾,以及信號對海面及平臺的反射干擾,可通過聲學基陣接收指向性設計加以部分消除。c.平臺上的電磁干擾。由于平臺大型設備較多,工作環(huán)境惡劣,加之本船位儀濕端、干端之間的距離較遠,走線路徑不確定,因此信號在傳輸過程中很可能受到不明干擾源的干擾。為此,本系統(tǒng)的微弱信號通過放大后差分傳輸,數(shù)據(jù)由RS485或RS422口完成傳輸,保證了命令和控制信息的下傳不受干擾。通過采取上述設計技術,再加上對信號處理機箱的電磁兼容性設計,有效地解決系統(tǒng)的干擾問題。
5)深海應答器電路功耗風險。風險描述:作業(yè)工況要求應答器在一個作業(yè)周期內(nèi)長期放置于水下,一般在90 d以上,功耗大導致應答器不能完成既定作業(yè)即失效。糾正措施:應答器電路組件包括了模擬、數(shù)字及控制電路,為保證應答器布放后能更長時間地工作,必須采用低功耗電路設計技術。經(jīng)對數(shù)字電路DSP的運算量的計算,和應答器電路工作環(huán)境的分析,應答器的電路設計主要采用3.3 V的低壓電路芯片,此類芯片的功耗明顯低于5 V芯片,可滿足系統(tǒng)對功耗的要求,同時又可滿足運算速度的要求。
6)基陣校準風險。風險描述:超短基線基元的機械安裝會存在一定的誤差,由于水聽器加工的不均勻性,其聲學中心與幾何中心也存在差異,這些均給系統(tǒng)帶來了附加相移(時延),造成性能指標下降。糾正措施:在使用前通過測量進行修正。對聲學基陣的校準,可以采用聲學的方法進行[5]。實際使用前在湖上對基陣進行校準,采用GPS測量數(shù)據(jù)與水聲測量數(shù)據(jù)進行比對的方法,運用最小二乘原理,以GPS測量數(shù)據(jù)為基準,對基陣參數(shù)和安裝偏差進行測量和校準。
7)應答器電池供電能力不足風險。風險描述:電池供電能力不足而不能滿足為系統(tǒng)提供連續(xù)工作90 d以上的電能。糾正措施:優(yōu)選能力密度比較高的鋰離子電池組,同時水下電池采用冗余設計,增加電池單元。在上位機軟件設計中增加了對應答器電池電壓的信息遙測功能,能方便、實時地了解電池狀況,以便及時充電。
8)水下設備海洋生物侵蝕風險。風險描述:系統(tǒng)水下設備長期置于水下,受海洋生物影響較大,換能器一旦被海洋生物所覆蓋,則系統(tǒng)無法正常工作。糾正措施:換能器生產(chǎn)過程中添加化學制劑,防止海洋生物寄生在換能器表面,保證系統(tǒng)正常工作。
1.2.2 試制階段風險分析
風險描述:根據(jù)對超短基線陣的性能要求和使用環(huán)境的分析,超短基線陣制造精度是該系統(tǒng)試制階段的風險。超短基線陣的精度低,導致產(chǎn)品測量不準確,難以滿足生產(chǎn)需求。糾正措施:超短基線陣要精確設計、制造,在完成加工后,進行水池測試,精確測量基陣孔徑、正交性、基元共面度等參數(shù),在湖上系統(tǒng)校準試驗中對各項誤差進行綜合測量。
1.2.3 試驗使用階段風險分析
風險描述:試驗使用階段的風險主要是基陣安裝精度。由于基陣安裝誤差、基陣傾斜等因素對系統(tǒng)定位測量帶來影響,導致設備最終定位數(shù)據(jù)偏差較大。糾正措施:對基陣的安裝偏差進行校準,以保證系統(tǒng)的水平定位性能考核準確性。校準工作可在停泊于岸邊的工作母船上進行,由可編程信號源發(fā)射模擬應答信號,DGPS配合標校出基陣水平安裝偏角,基陣的姿態(tài)傾斜由安裝于超短基線陣中的高精度姿態(tài)傳感器測量得到[6]。
1.2.4 維修保障階段風險分析
風險描述:維修保障階段的風險主要是水下設備的診斷維修,整套設備工作在水面以下,出現(xiàn)問題不宜實時取出診斷。糾正措施:超短基線陣的姿態(tài)、深度、水溫等參數(shù)都可由上位機軟件實時獲取;應答器的信息可通過水聲遙測獲得。實現(xiàn)遠程診斷。故障定位準確的情況下通過更換零件或元器件解決問題,故障判斷不夠準確或緊急情況下通過更換相關部件解決問題。
2 結論
設備、工具及零部件研制過程中的風險是客觀存在的,對風險的分析和評價是主觀、客觀結論相結合的過程,且在研發(fā)過程中各風險因素之間存在相互關聯(lián),對某些過程中潛在風險因素的評估也很難用定量數(shù)字來描述,本文對明確認識到的風險或某些潛在的風險因素進行了定性分析,并提出了相應的規(guī)避辦法。實際研制過程中采用了專家評估法對本項目風險作了定性分析,在研制過程中強化風險意識,以便在零部件及設備系統(tǒng)研制過程中做出正確的決策,防患于未然,為保證零部件及設備系統(tǒng)研制成功提供了更大的保障。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
