基于ADAMS的清洗閘門鋼絲繩攀爬機器人的可行性分析
2022-02-19 10:12:34張港陸曉丹
機械工程師 2022年2期
關鍵詞:分析
張港,陸曉丹
(1.浙江同濟科技職業學院,杭州 311231;2.浙江理工大學理學院,杭州 310018)
0 引言
在我國水利工程行業使用的大中型水閘中, 采用卷揚式啟閉機的約占一半以上。在卷揚式啟閉機中鋼絲繩是最重要的連接件之一,該部件與電動機和閘門直接關聯。根據國家水利部對啟閉機的養護要求,鋼絲繩應定期清洗養護,目前我國對水閘鋼絲繩養護的要求為一般情況下每年定期清洗2次[1]。目前國內對水閘鋼絲繩的清洗大多采用傳統的人工清洗方式,由麻繩懸吊操作人員采用原始的銅絲刷或鋼絲刷、膩子鏟、抹布等簡單工具,輔助以清洗劑(柴油或汽油)進行清洗[2]。因此設計一種能夠在鋼絲繩上攜帶清洗裝置的機器人是急需解決的問題。Hae-BumYun等[3]設計了一款爬桿機器人,該機器人的車輪由附在彈簧上的車輪和側架組成,可適應各種可變直徑的桿件,聚氨酯輪用于斜拉索上的快速移動,在移動時可以有效提高摩擦力并減少拉索表面損傷;Kanza Zafar[4]設計了一款需借助3根鋼絲繩攀爬的爬繩機器人,該機器人可適用于水平和垂直2個方向的運動,在進行水平運動時只采用1對滾輪推進,在進行垂直運動時采用2對滾輪推進。但上述兩款機器人均采用輪式結構,承載能力較弱,無法滿足攜帶清洗裝置的需求。國內對于鋼絲繩攀爬機器人的研究較少,對具有清洗裝置的攀爬機器人的研究更是匱乏。2003年,三河閘管理處等[1]研發出新型水閘鋼絲繩自動清洗養護機,在閘門運行啟閉時對鋼絲繩進行洗刷,同時還可自動涂抹黃油防護;2013年,武漢佑[5]研制了WX060鋼絲繩清潔養護系統,該系統具有較高的安全性,清潔效率高于人工5倍以上,清潔效果較好且在使用上方便快捷,但此設備在使用除渣器進行除渣工作時,不利于環境的保護。以上兩個裝置在對鋼絲繩的清洗時,須依靠鋼絲繩的運動,使用范圍較為局限。
本文采用仿生原理設計攀爬機器人,該機器人采用一端抱緊一端移動的方式進行運動,通過機器人在鋼絲繩上的運動實現清洗,其穩定可靠、運動平穩且承載能力強,可以攜帶清洗裝置以實現攀爬機器人的清洗功能。
1 攀爬機器人的運動原理
閘門鋼絲繩攀爬機器人組成包括內部攀爬裝置和外部攀爬裝置兩個部分,通過仿尺蠖運動,實現該裝置交替攀爬[6]。當內部攀爬裝置夾緊模塊夾緊后,外部攀爬裝置的夾緊模塊松開,隨后再通過內部攀爬裝置中的驅動模塊,帶動外部攀爬裝置運動,同理內部攀爬裝置的向下運動也是如此,由此可完成此裝置沿閘門鋼絲繩上下攀爬的任務,其結構如圖1所示。
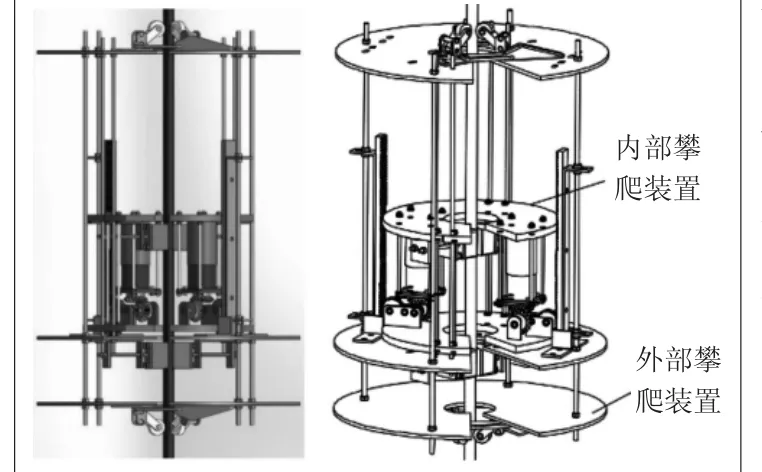
圖1 閘門鋼絲繩攀爬機器人
在初始狀態下,自動攀爬機器人中的兩夾緊模塊都處于夾緊狀態,如圖2(a)所示。開始動作時,內部攀爬裝置中的夾緊模塊松開,如圖2(b)所示。電動機開始轉動,帶動錐齒輪轉動,進而帶動齒輪副轉動,最后將運動狀態傳到齒條上,完成內部攀爬裝置的向上攀爬,如圖2(c)所示。當內部攀爬裝置爬到接近外部攀爬裝置上板時,停止運動,此時內部攀爬裝置中的夾緊模塊開始夾緊,外部攀爬裝置中的夾緊模塊松開,如圖2(d)所示。電動機開始反轉,帶動錐齒輪轉動,進而帶動齒輪副轉動,最后將運動傳到齒條上,從而帶動整個外部攀爬裝置向上移動,如圖2(e)所示。當外部攀爬裝置隔層板爬到接近內部攀爬裝置下板時,停止運動,然后外部攀爬裝置中的夾緊模塊夾緊,如圖2(f)所示。至此一套完整的運動過程完成。下降過程可以通過調節電動機的轉向進行控制,其動作控制過程正好相反。

圖2 攀爬機器人運動過程圖
2 攀爬機器人ADAMS運動學分析
2.1 模型導入與仿真分析
ADAMS為一種分析機器人動力學的軟件,其原理是將整體看作一個多模塊固態的整體動力學問題,利用Lagrange力學對機器人整體結構進行運動學和動力學的分析[7]。
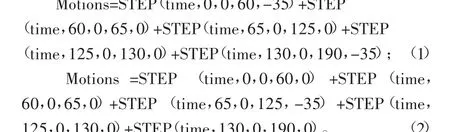
在SolidWorks軟件中建立閘門鋼絲繩自動攀爬機器人模型,將SolidWorks中建立好的模型文件保存為.xmttxt格式,啟動ADAMS運動學與動力學軟件,將模型導入,進行分析。此次分析分為2個階段:第一個階段為內部攀爬裝置固定,外部攀爬裝置向下攀爬階段。在該階段給動力源施加一個STEP驅動函數式(1),分析圖如圖3(a)所示。第二個階段為外部攀爬裝置固定,內部攀爬裝置向下攀爬階段。此時,給動力源施加一個STEP驅動函數式(2),分析圖如圖3(b)所示。
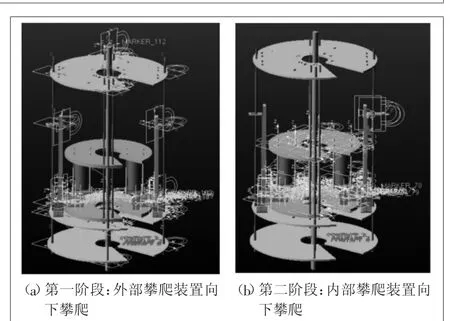
圖3 自動攀爬機器人整體ADAMS動力學分析圖
2.2 輸出結果
將求解時間設置為190 s,步數設置為50步,開始進行ADAMS運動學求解,得到外部攀爬裝置在190 s時間內的位移、速度、加速度的時間函數圖像,如圖4(a)所示。圖中粉線為外部攀爬裝置的位移隨時間變化的關系,可以看出在前60 s的時間內,外部攀爬裝置運動了200 mm的距離,在60~130 s之間外部攀爬裝置是靜止不動的,在130~190 s之間外部攀爬裝置與前60 s的運動一致向下運動了200 mm。圖中紅線表示的是外部攀爬裝置的速度隨時間變化的關系,可以看出外部攀爬裝置在前60 s的時間內,速度與時間的變化關系呈拋物線的形式,在60~130 s之間外部攀爬裝置速度為零,在130~190 s外部攀爬裝置與前60 s的運動速度與時間之間的關系呈拋物線的關系。與圖中位移時間關系圖像相對應,圖中藍線表示的是外部攀爬裝置的加速度與時間變化的關系。從分析的運動圖中可以看出外部攀爬裝置的運動是穩定的,并未出現干涉現象。

圖4 兩裝置速度、位移函數曲線
第二階段,將求解時間設置為190 s,步數設置為50步,得到內部攀爬裝置在190 s的時間內的位移、速度、加速度的時間函數圖像,如圖4(b)所示。圖中粉線表示的是內部攀爬裝置的位移隨時間變化的關系,可以看出在前65 s的時間內,內部攀爬裝置是靜止不動的,在65~125 s之間內部攀爬裝置運動了200 mm的距離,在125~190 s之間內部攀爬裝置與前65 s運動一致,靜止不動。圖中紅線表示的是內部攀爬裝置的速度隨時間變化的關系,可以看出內部攀爬裝置在前65 s的時間內,靜止不動,在65~125 s之間內部攀爬裝置的速度與時間的關系呈拋物線的形式,在125~190 s內部攀爬裝置與前65 s的速度一樣靜止不動。與圖中位移時間關系圖像相對應,圖中藍線表示的是內部攀爬裝置的加速度隨時間變化的關系。從分析的運動圖中可以看出內部攀爬裝置的運動與外部攀爬裝置的運動是一一對應的。該結論說明整個本體攀爬機器人的運動是穩定的,同時說明該攀爬機器人的設計是合理可行的。
3 攀爬機器人清洗裝置的有效性分析
為提高閘門鋼絲繩的清洗效率,結合本閘門鋼絲繩自動攀爬機器人的設計特點,設計一種適用于本體攀爬機器人的清洗裝置,如圖5所示。考慮到鋼絲繩的材質和環保等因素,清洗裝置使用激光清洗[8]。清洗裝置作為本體攀爬機器人的載體,需要滿足在本體攀爬機器人上自由安裝和拆卸,同時考慮到本體攀爬機器人的向上運動對清洗裝置環狀清洗的影響。因此在設計清洗裝置時為該裝置增加一個向上的滾珠絲杠傳動,該傳動可以將回轉運動轉化為直線運動的傳動方式,從而保證清洗裝置能實現全面清洗鋼絲繩,在理論上提高清洗效果。
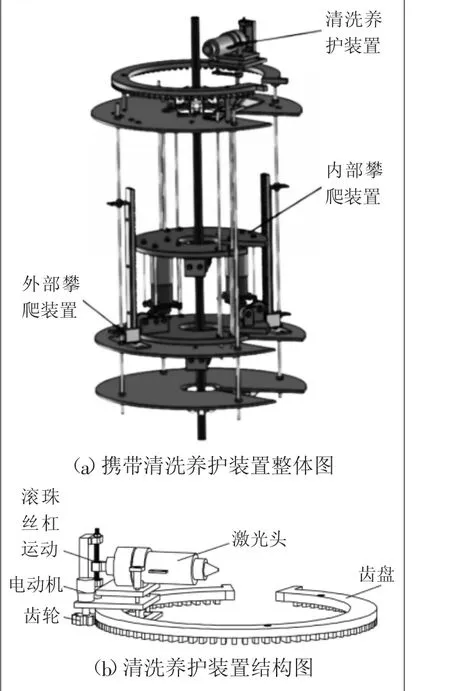
圖5 適應本體攀爬機器人的清洗裝置
3.1 加入滾珠絲杠前攀爬機器人的ADAMS運動分析
當本體攀爬機器人僅攜帶激光清洗頭進行旋轉清洗時,激光清洗頭只是以螺旋的運動軌跡進行上下運動清洗,此時激光清洗頭在鋼絲繩每段處出現的次數僅為1次。將只有旋轉運動的清洗裝置加入到本體攀爬機器人上,通過ADAMS運動學分析[9],分析過程如圖6所示。
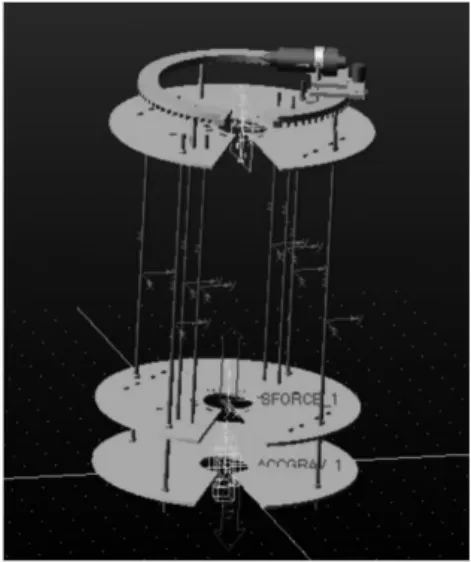
圖6 本體攀爬機器人只攜帶激光清洗頭進行旋轉清洗的ADAMS分析圖
3.2 加入滾珠絲杠后攀爬機器人的ADMAS分析
將清洗裝置增加一個滾珠絲杠運動后,此時本體攀爬機器人攜帶激光清洗頭向上運動的同時,也為激光清洗頭增加了第二個來回的上下運動,這便增加了鋼絲繩被激光清洗頭清洗的機會。將攜帶滾珠絲杠運動的清洗裝置加入到本體攀爬機器人上,通過ADAMS運動學分析[10],分析過程如圖7所示。

圖7 在清洗裝置中加入滾珠絲杠運動后的ADAMS分析圖
3.3 分析結果對比
通過觀察激光清洗頭Z軸方向的位移時間函數圖像可以看到,如圖8所示的曲線C表示本體攀爬機器人只攜帶激光清洗頭進行運動的位移時間圖,激光清洗頭以加速度為1 mm/s2向上進行移動,激光清洗頭在鋼絲繩的每個高度處僅出現1次。而在清洗裝置中加入一個滾珠絲杠運動后,激光清洗頭位移時間關系如圖8曲線B所示,此時激光清洗頭在鋼絲繩每個高度處出現的次數至少為1次,且在大部分位置上則出現2次以上。

圖8 激光清洗頭在有無滾珠絲杠運動Z軸方向位移時間圖
通過實驗發現(如圖9),激光清洗裝置在清洗某個位置達到2 次以上時能獲得較好的清潔效果。通過上述分析得知,自動攀爬機器人的激光清洗裝置在加入滾珠絲杠運動后,鋼絲繩被清洗的機會增加,因此清洗效果也將得到大幅提升。
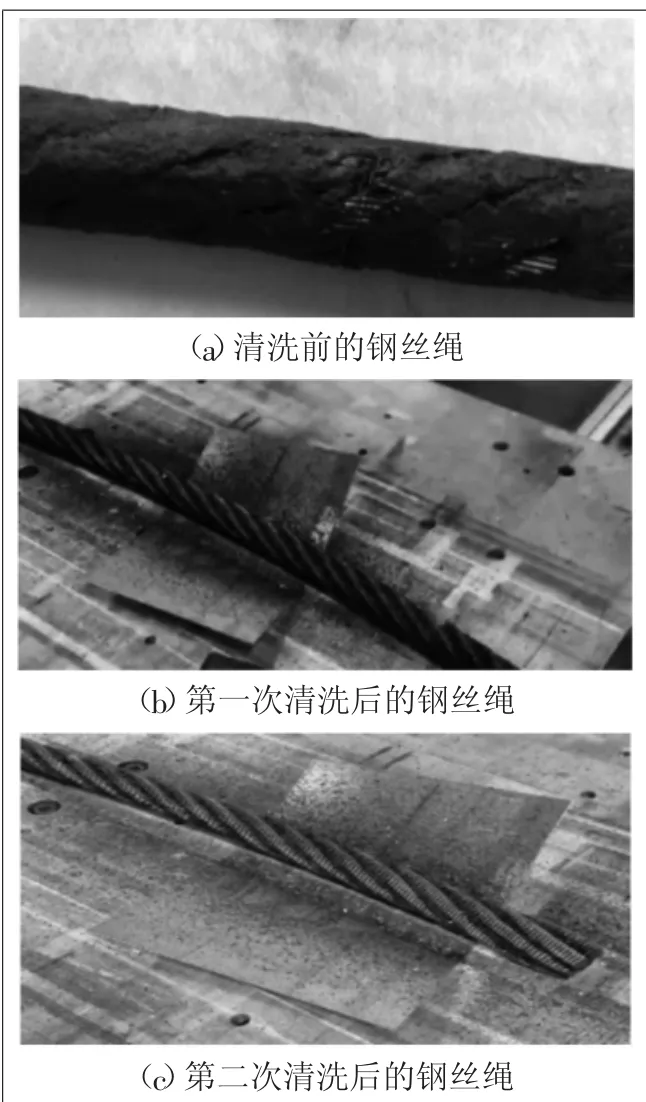
圖9 激光清洗機清洗鋼絲繩實驗圖
4 結論
本文針對國內目前還在使用人工懸吊的方式清洗鋼絲繩存在較大安全隱患的問題,根據閘門鋼絲繩的工作需求,設計了一款能攜帶清洗裝置的閘門鋼絲繩自動攀爬機器人。以自動攀爬機器人為研究對象,對該機器人進行運動學仿真,通過ADAMS仿真分析,驗證了新設計的鋼絲繩自動攀爬機器人運動性能穩定,說明了機器人設計的可行性。為優化結構設計,對加入滾珠絲杠的清洗裝置攀爬機器人的運動進行對比分析,發現加入滾珠絲杠運動后的激光清洗頭在每段鋼絲繩處,清洗頭出現的次數明顯增多,增加了鋼絲繩被清洗的機會,從而提升了鋼絲繩清洗效果。
基于理想實驗下,本文對攀爬機器人進行分析,閘門鋼絲繩處于受拉狀態,鋼絲繩也并未出現彎曲變形現象。但在實際工況中,由于閘門鋼絲繩經過長時間的使用、風化,以及海水電解的影響會出現鋼絲繩彎曲變形現象,因此需要對機器人在實際工況的閘門鋼絲繩上進行攀爬實驗分析,觀察分析機器人在實際工況的閘門鋼絲繩上的攀爬能力與效果。同時,該機器人質量較大,靈活性不足,存在電動機不同步造成齒輪卡齒的問題。因此后續將對該機器人進一步優化,使得該機器人具有較高的靈活性,對環境有較強的適應性和操作控制的精確性。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
