基于Q學(xué)習(xí)算法的摘掛列車調(diào)車作業(yè)計劃優(yōu)化
2022-02-16 06:56:48施俊慶陳林武林柏梁孟國連夏順?gòu)I
中國鐵道科學(xué) 2022年1期
施俊慶,陳林武,林柏梁,孟國連,夏順?gòu)I
(1.浙江師范大學(xué) 工學(xué)院,浙江 金華 321004;2.浙江師范大學(xué) 浙江省城市軌道交通智能運維技術(shù)與裝備重點實驗室,浙江 金華 321004;3.北京交通大學(xué) 交通運輸學(xué)院,北京 100044)
調(diào)車作業(yè)計劃是規(guī)定車輛如何調(diào)移及其作業(yè)程序的具體行動計劃。按站順編組摘掛列車是指將調(diào)車場某調(diào)車線上集結(jié)的去往前方中間站的車輛,從雜亂無章到按到達中間站的順序進行編組的過程,是一項十分復(fù)雜而重要的工作。
調(diào)車作業(yè)計劃的質(zhì)量決定了車站調(diào)車工作的效率[1],許多學(xué)者對此展開深入研究,力求不斷提高編制質(zhì)量。文獻[2]提出了“表格調(diào)車法”,將摘掛列車車輛編組順序問題轉(zhuǎn)變?yōu)? 種編號問題,減少了調(diào)車鉤數(shù)和占用的調(diào)車線數(shù)。文獻[3]提出了“統(tǒng)籌對口調(diào)車法”,將編組調(diào)車過程描述為一系列連續(xù)的對口過程,優(yōu)化了選編調(diào)車的連掛鉤數(shù)。文獻[4—5]根據(jù)編制鉤計劃條件下的調(diào)車方案及摘掛列車下落等特點,提出變異方案的概念和“消逆法”調(diào)車作業(yè)理論,改進了調(diào)車作業(yè)編制方法。文獻[6]分析了車組隔離、股道數(shù)量限制等情況下的編組摘掛列車鉤計劃優(yōu)化問題。文獻[7]將摘掛列車下落問題抽象為排序問題,提出了1種基于排序二叉樹的編組鉤計劃自動編制方法。文獻[8]在改進“分析計算法”的基礎(chǔ)上,提出溜放鉤數(shù)計算式,優(yōu)化了調(diào)車方案的選擇。文獻[9]提出了基于分支定界法的摘掛列車編組優(yōu)化算法。
隨著信息技術(shù)的進步,傳統(tǒng)的優(yōu)化算法已無法滿足鐵路調(diào)車工作決策智能化發(fā)展的需求,強化學(xué)習(xí)的出現(xiàn)為此提供了新思路。強化學(xué)習(xí)技術(shù)是機器學(xué)習(xí)的1 個分支,從算法上看主要包括基于值的算法和基于策略的算法,可以作為支持調(diào)車工作智能化決策的有效工具。Watkins 于1989年首次提出的Q學(xué)習(xí)算法是1 種典型的基于值的算法,也是目前強化學(xué)習(xí)算法中應(yīng)用最廣泛且最有效的1 種算法[10—11]。在鐵路智能調(diào)度方面,文獻[12]根據(jù)車輛的位置、到達時間、停留時間等運行狀況,基于強化學(xué)習(xí)方法對列車調(diào)度算法進行了改進;文獻[13]以減少調(diào)車機車移動為目的,研究了基于Q學(xué)習(xí)算法的貨車調(diào)度優(yōu)化問題。在列車運行控制方面,文獻[14—15]通過預(yù)測列車的運行狀態(tài)和調(diào)車計劃等,運用強化學(xué)習(xí)技術(shù)和深度Q學(xué)習(xí)算法研究了列車的控制方法;文獻[16]引入帶軌跡的延遲獎勵,結(jié)合Q學(xué)習(xí)算法研究了列車運行調(diào)整問題,減少了相應(yīng)的計算時間。
本文將強化學(xué)習(xí)技術(shù)和Q學(xué)習(xí)算法應(yīng)用于摘掛列車編組調(diào)車作業(yè)計劃優(yōu)化問題。在表格調(diào)車法的基礎(chǔ)上,通過動作、狀態(tài)和獎勵3 要素的設(shè)置構(gòu)建強化學(xué)習(xí)模型,改進Q學(xué)習(xí)算法,以最小化調(diào)車程為目標(biāo)建立待編車列和最佳調(diào)車作業(yè)方案之間的映射關(guān)系,智能體學(xué)習(xí)充分即累加Q值達到收斂狀態(tài)時,計算得到優(yōu)化后的調(diào)車表及調(diào)車作業(yè)計劃。
1 問題描述
沿用文獻[1]中的表述描述調(diào)車作業(yè)計劃編制問題,用阿拉伯?dāng)?shù)字代替車組到站,并規(guī)定距離本站最遠的車組到站為“1”,從遠到近依次編為2,3,…,調(diào)車機車在調(diào)車場的右端作業(yè),根據(jù)“按站順編組”的要求,將待編車列中的車組連掛成列,并使列車編成后各車組的排列順序為依次遞增或相等。調(diào)車作業(yè)計劃優(yōu)化的本質(zhì)是通過調(diào)車鉤的安排,實現(xiàn)調(diào)車程的最小化。其中,調(diào)車鉤指機車連掛或摘解1 組車輛的作業(yè),分為“掛車鉤”和“摘車鉤”;調(diào)車程指機車或機車連掛車輛加減速1次的移動,通常情況1 個掛車鉤對應(yīng)于2 個調(diào)車程,1 個摘車鉤對應(yīng)于1 個調(diào)車程。調(diào)車作業(yè)計劃的編制可用調(diào)車表來進行。調(diào)車表是調(diào)車場的示意圖,橫格為“列”,表示股道,豎格為“行”,表示車組在待編車列中的相互位置。假設(shè):每個車組僅含1 輛車,牽出線及調(diào)車線的存車、調(diào)車機車的牽引能力等不受限制。
同時引入如下定義。
(1)接連:從左側(cè)某車組起,相鄰車組編號差值不大于1且為遞增或相等的形式。
(2)非接連:與接連相對應(yīng),相鄰車組不滿足接連定義的其他所有形式。
(3)目標(biāo)暫合列:調(diào)車表中非接連形式車組的所在列。
(4)非接連數(shù):非接連形式的車組數(shù)量。相鄰2 個車組組成非接連形式后,便會產(chǎn)生1 個非接連數(shù)。
例如,調(diào)車表中某列的車組編號依次為“1323456”。其中,相鄰車組1 與3 之間的編號差值為2,該相鄰車組構(gòu)成非接連形式;相鄰車組3與2 的編號為遞減,該相鄰車組也構(gòu)成非接連形式;從第3個車組起,相鄰車組2,3,4,5 與6 構(gòu)成接連形式。該列為目標(biāo)暫合列,非接連數(shù)為2。
2 調(diào)車作業(yè)問題的強化學(xué)習(xí)模型
在表格調(diào)車法的基礎(chǔ)上,將調(diào)車作業(yè)計劃分為下落和重組2 個部分,通過動作、狀態(tài)和獎勵3 要素的設(shè)置構(gòu)建強化學(xué)習(xí)模型。
2.1 相關(guān)參數(shù)及定義
參數(shù):K為某站實際可用的股道數(shù)量;L為待編車列中的車組數(shù)量;G為掛車鉤數(shù);D為摘車鉤數(shù);Z為調(diào)車機車最左端連掛的車組編號;Cij為調(diào)車表中第i列中第j輛車;Li為第i條股道上的車組數(shù);Pi為第i條股道上的最右端車組編號,若第i條股道上沒有車組,則不存在Pi。
編組列車時,為了調(diào)轉(zhuǎn)待編車列中車組間的排序,需要將待編車列中的反順序車組分解到不同的股道上,這種調(diào)車過程反映在調(diào)車表上,被稱為下落[1]。任取待編車列“34172612537”的某一下落方案為例,所有車組下落后,各車組在調(diào)車場(調(diào)車表)中的位置見表1。表中:每1 格中的數(shù)字表示相應(yīng)編號的車組下落到對應(yīng)編號的股道上。由表1可知:此時K=5,L=11;對于第1 條股道,C11=3,C12=4,C13=5,L1=3,P1=5;存在唯一的目標(biāo)暫合列,即i=4,此目標(biāo)暫合列中僅車組7與6構(gòu)成非接連形式,非接連數(shù)為1。

表1 初始下落方案調(diào)車表
將待編車列的最右端車組定義為端組。考慮到分解待編車列時,若端組為最大編號車組,對其進行下落操作可能會產(chǎn)生1 個多余的摘車鉤。基于此,本文假設(shè)端組為最大編號車組時,根據(jù)下落方案所得的調(diào)車表,端組及其所在列左端直接相連的車組將連掛在調(diào)車機車上,不進行下落。例如在表1中,端組為最大編號車組(車組7),但調(diào)車表中其左端相鄰位置并無車組,所以僅端組不下落。
2.2 強化學(xué)習(xí)的動作與狀態(tài)
1)動作
以調(diào)車機車為智能體,將車組下落的股道編號定義為智能體的動作。用1個L維的行向量αn表示智能體對第n個車組的動作(1≤n≤L),αn中第n個分量記為an,表示智能體選擇的股道編號,其余分量均為0。如果智能體可選擇的動作有K種,則有動作集合A={1,2,…,K},但各車組可選擇的動作均為K種時會存在大量重復(fù)解,為了減少重復(fù)性,規(guī)定第n個車組可選擇的動作集合An(An?A)為

2)狀態(tài)
為反映調(diào)車場對應(yīng)的股道下落情況,以調(diào)車表為環(huán)境,將調(diào)車表簡化為1 個L維的行向量Sn=(x1,x2,…,xL),用于表示第n個車組下落后的調(diào)車表狀態(tài),其中xn表示第n個車組下落后所處的股道編號。當(dāng)?shù)趎個車組未下落時,xn=0;當(dāng)?shù)趎個車組選擇某1 條股道下落時,向量Sn中第n個分量變?yōu)樗x股道編號an,并且狀態(tài)發(fā)生1 次變化。設(shè)調(diào)車表的初始狀態(tài)S0=(0,0,…,0),此時所有車組均未開始下落;調(diào)車表的目標(biāo)狀態(tài)SL=(a1,a2,…,aL),此時所有車組均完成下落。以表1為例,下落全部完成時該調(diào)車表對應(yīng)的狀態(tài)S11即為目標(biāo)狀態(tài),S11=(1,1,2,4,3,4,2,2,1,3,4)。
3)狀態(tài)更新規(guī)則
當(dāng)調(diào)車表處于初始狀態(tài)S0時,全部車組均未下落,此時,智能體對第1 個車組選擇的動作為α1=(a1,0,0,…,0),據(jù)此更新的下1 個狀態(tài)為S1。以此類推,在狀態(tài)Sn?1下,智能體采取動作αn(αn∈An)后,下1個狀態(tài)更新為Sn,即

式中:Sn為更新后的狀態(tài);αn為對第n個車組的動作。
以表1為例,當(dāng)?shù)? 個車組下落后,狀態(tài)S4=(1,1,2,4,0,0,0,0,0,0,0),此時智能體對第5個車組的動作α5=(0,0,0,0,2,0,0,0,0,0,0),更新后的狀態(tài)S5=(1,1,2,4,2,0,0,0,0,0,0)。
2.3 車組掛車、摘車條件和車輛重組流程
當(dāng)所有車組均下落后,需要通過掛車和摘車對調(diào)車場上的車輛進行重組,以實現(xiàn)按站順編組。掛車、摘車的具體條件及車輛重組流程如下。
1)掛車條件
條件1:存在Cij及其右端所有車組,都能與調(diào)車機車上連掛的車組構(gòu)成接連形式,且股道中不存在比Cij大的車組。
條件2:按非接連數(shù)從大到小依次尋找目標(biāo)暫合列,其中存在Cij=Pm或Cij=Pm+1,且i≠m。
條件3:全部由接連構(gòu)成的列中存在Cij=Pm或Cij=Pm+1,且i≠m。
當(dāng)滿足以上任意1 條掛車條件時,將車組Cij及其右端的所有車組掛至調(diào)車機車上。
2)摘車條件
條件4:存在Pi,使Z=Pi。
條件5:存在Pi,使Z=Pi+1。
當(dāng)滿足以上任意1 條摘車條件時,將調(diào)車機車最左端的車組溜放至相應(yīng)股道。
3)車輛重組流程
車輛重組的具體流程如圖1所示。待編車列下落完畢后,其余車組需先根據(jù)調(diào)車表依次判斷條件1—3,確定是否掛車;然后判斷調(diào)車機車上所有車組是否構(gòu)成接連且調(diào)車表中是否沒有比Z大的車組,若成立,且調(diào)車表中存在剩余車組則繼續(xù)判斷掛車條件,直到不成立;再根據(jù)條件4—5 確定是否摘車,溜放車組直至調(diào)車機車上的所有車組構(gòu)成接連形式,且股道中不存在比Z大的車組;此時,若本輪還未進行過掛車或摘車作業(yè),需將Z車組隨機溜放至任意股道,并再次判斷摘掛條件;循環(huán)上述過程,直至調(diào)車表中無車組,最后獲得調(diào)車作業(yè)計劃表,并根據(jù)計劃表得到掛車鉤數(shù)G和摘車鉤數(shù)D。
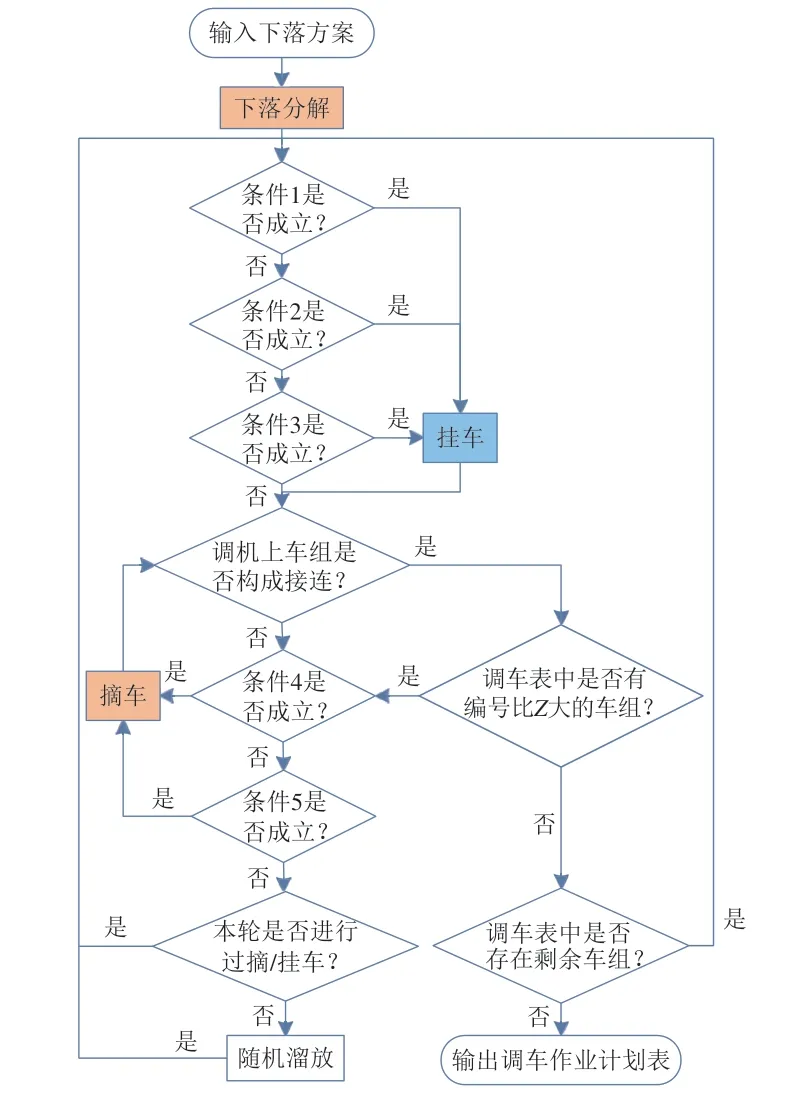
圖1 下落后車組的重組流程
2.4 獎勵函數(shù)設(shè)計
編組列車過程中,調(diào)車程的數(shù)量是評判下落方案優(yōu)劣的主要依據(jù)。同時,下落后調(diào)車表中非接連數(shù)越多,需要的掛車鉤就越多,調(diào)車程數(shù)量也會隨之增加,因此根據(jù)車組下落后的接連狀態(tài)及總調(diào)車程,分即時獎勵和附加獎勵2部分設(shè)計獎勵函數(shù)。
根據(jù)車組下落后的接連狀態(tài)確定即時獎勵,規(guī)定下落過程中,對第n個車組執(zhí)行動作αn后獲得的即時獎勵rSn?1,αn為

式中:λ為0-1 變量,當(dāng)執(zhí)行動作后能與所在股道上的相鄰車組構(gòu)成接連時取1;否則取0。
車輛重組后,根據(jù)調(diào)車程數(shù)量確定下落方案的附加獎勵Rrestructure為

式中:φ為任意正數(shù)。
合并上述2 部分獎勵,智能體每選擇1 個動作后的累積獎勵RSn?1,αn為

式中:RSn?1,αn為智能體在狀態(tài)Sn?1時選擇動作αn的累積獎勵;m為1到n的自然數(shù)。
智能體依據(jù)環(huán)境狀態(tài)選擇動作,每次執(zhí)行動作后,根據(jù)上述計算式確定累積獎勵。當(dāng)所有車組完成下落,即達到目標(biāo)狀態(tài)時,需根據(jù)車組下落和車輛重組過程得到調(diào)車作業(yè)計劃表,并統(tǒng)計相應(yīng)的掛車鉤數(shù)和摘車鉤數(shù),計算附加獎勵。調(diào)車作業(yè)計劃表的優(yōu)劣通過獎勵函數(shù)體現(xiàn),獎勵函數(shù)計算得到的數(shù)值越大,意味著調(diào)車作業(yè)計劃表越優(yōu)。
3 Q學(xué)習(xí)算法改進
改進Q學(xué)習(xí)算法,對調(diào)車作業(yè)的強化學(xué)習(xí)模型進行求解。Q學(xué)習(xí)算法根據(jù)智能體執(zhí)行每個動作后的累積獎勵來決定狀態(tài)與相應(yīng)的動作之間的映射關(guān)系。映射關(guān)系通過Q值來表示,即智能體在狀態(tài)Sn?1時選擇動作αn能夠獲得獎勵的期望。Q值越大,說明該狀態(tài)下執(zhí)行該動作越有利。求解前文模型時,在調(diào)車程最小化的目標(biāo)下,構(gòu)建待編車列與最優(yōu)調(diào)車作業(yè)計劃間的映射關(guān)系。以全部車組下落完畢為1 次迭代,每次迭代中,當(dāng)?shù)趎個車組下落時,根據(jù)當(dāng)前狀態(tài)Sn?1,從動作集合An中選擇可用的動作αn并執(zhí)行,Q值根據(jù)迭代中的累積獎勵進行更新。
使用動態(tài)的Q表來存儲智能體學(xué)習(xí)所得到的經(jīng)驗知識,見表2。表中:每行數(shù)字中的第1 到L列構(gòu)成狀態(tài),第L+1 列為該狀態(tài)對應(yīng)的Q值。在初始時刻,Q表僅記錄了初始狀態(tài)S0及其對應(yīng)的Q值;每當(dāng)狀態(tài)發(fā)生變化時,Q表中該狀態(tài)對應(yīng)的Q值將被更新;若Q表中無該狀態(tài),則插入該狀態(tài)及其Q值。智能體學(xué)習(xí)得到的最終Q表體現(xiàn)了待編車列和最優(yōu)調(diào)車作業(yè)方案之間的映射關(guān)系。
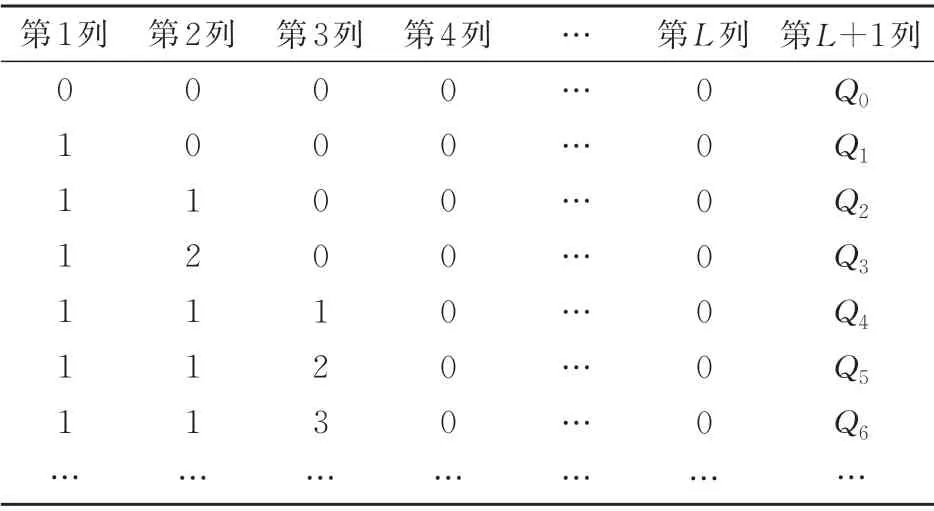
表2 智能體學(xué)習(xí)得到的動態(tài)Q表
第n個車組下落時,Q值的更新計算式為

式中:Q′n?1(Sn?1,αn)為狀態(tài)Sn?1時智能體執(zhí)行動作αn后更新的Q值,αn由策略π(α|S)決定,該策略表示狀態(tài)S下選擇動作α的概率;β為學(xué)習(xí)率,β∈(0,1],學(xué)習(xí)率越大,表示采用新的嘗試得到的結(jié)果比例越大,保持舊的結(jié)果的比例越小;γ為折扣系數(shù),γ∈(0,1],如果γ接近于0,則智能體會傾向于即時獎勵,如果γ接近于1,則智能體會更多地考慮未來的獎勵,愿意延遲獎勵[11]。

其中,
式中:ε為智能體的探索率;y為迭代次數(shù);argmaxQ(S,α)為狀態(tài)S下使得Q值最大的動作。
將Q表中的Q值之和定義為累加Q值。設(shè)定連續(xù)1 000 步內(nèi)累加Q值不發(fā)生變化即收斂。算法的具體過程如下。
步驟1:智能體開始學(xué)習(xí),初始化Q表,確定待編車列,默認參數(shù)β=0.5,γ=0.9,φ=5 000。
步驟2:生成初始狀態(tài)S0。
步驟3:根據(jù)當(dāng)前狀態(tài)Sn?1,從可選擇的動作集合An中,按式(7)選擇動作αn。
步驟4:根據(jù)動作αn將狀態(tài)更新為Sn,并計算累積獎勵RSn?1,αn,按式(6)更新Q值。
步驟5:判斷Sn是否為目標(biāo)狀態(tài),是則執(zhí)行步驟6,否則執(zhí)行3。
步驟6:判斷累加Q值是否已經(jīng)收斂,是則執(zhí)行步驟7,表示此時智能體已學(xué)習(xí)充分,否則執(zhí)行步驟2。
步驟7:退出循環(huán)并記錄數(shù)據(jù),結(jié)束算法學(xué)習(xí),求解得到最優(yōu)調(diào)車作業(yè)計劃。
4 算例分析
4.1 計算過程
采用上文模型和算法進行算例分析,使用的實驗運行環(huán)境為:設(shè)備CPU-Intel Core i7,工具Vi?sual Studio(C#)。
以上文待編車列“34172612537”為例,在可用股道數(shù)量為3條時(K=3),強化學(xué)習(xí)模型進行充分學(xué)習(xí)后,累加Q值的變化如圖2所示。起始階段累加Q值為零,并且智能體會有較大概率進行探索,學(xué)習(xí)各種方案;隨著迭代次數(shù)的增加,累加Q值會不斷增加,而當(dāng)智能體學(xué)習(xí)充分后,會執(zhí)行回報最大的動作序列,使得累加Q值趨于穩(wěn)定,達到收斂狀態(tài)。

圖2 累加Q值的變化
智能體學(xué)習(xí)充分后的最優(yōu)調(diào)車表見表3,此時目標(biāo)狀態(tài)為s11=(1,1,2,3,3,3,2,2,1,2,2)。當(dāng)?shù)竭_目標(biāo)狀態(tài)后,智能體依照車輛重組流程,根據(jù)下落方案將車組依次溜放至相應(yīng)股道上。由表3可知:待編車列的端組為車組7,其相鄰位置為車組3,因此車組3 與7 均不溜放,連掛于調(diào)車機車上;車組下落結(jié)束后,根據(jù)車輛重組流程在調(diào)車表中依次尋找滿足掛車條件1—3的車組;股道3為目標(biāo)暫合列,該列第2 個車組及其右端相連的車組滿足條件2,因此將車組2 與6 連掛至調(diào)車機車,此時,調(diào)車機車上所有車組(2637)并不構(gòu)成接連,應(yīng)根據(jù)摘車條件4—5 尋找能夠溜放的股道;股道2中第3 個車組滿足條件4,因此將Z=2 溜放至股道2,此時調(diào)車機車上所有車組仍不構(gòu)成接連,須繼續(xù)根據(jù)條件4—5 尋找能夠溜放的股道,直至調(diào)車機車上所有車組構(gòu)成接連且股道中沒有比Z更大的車組,因此將Z=6溜放至股道1,Z=3溜放至股道2;此時僅剩端組7 連掛在調(diào)車機車上,且股道中沒有比7更大的車組,因此須再次尋找滿足掛車條件1—3的車組,直至股道中沒有任何車組。

表3 最優(yōu)調(diào)車表
表3執(zhí)行的具體調(diào)車作業(yè)計劃見表4。由表4可知:該方案共用到調(diào)車鉤12 個,其中掛車鉤5個,摘車鉤7個;用到調(diào)車程17個。

表4 調(diào)車作業(yè)計劃表
4.2 效果對比
選取待編車列“34172612537”為案例1,待編車列“42531244627756186”為案例2,待編車列“1543253213”為案例3,分別利用統(tǒng)籌對口法、排序二叉樹法和分支定界法,依次與本文方法進行調(diào)車作業(yè)計劃的對比驗證,結(jié)果見表5。對于案例1 中的統(tǒng)籌對口調(diào)車法在K=4 時存在多種優(yōu)化方案,本文任選1 種進行對比;案例2 和案例3中的待編車列及所用方法得到的結(jié)果,分別取自文獻[7]和文獻[9]。
由表5可得出以下結(jié)論。
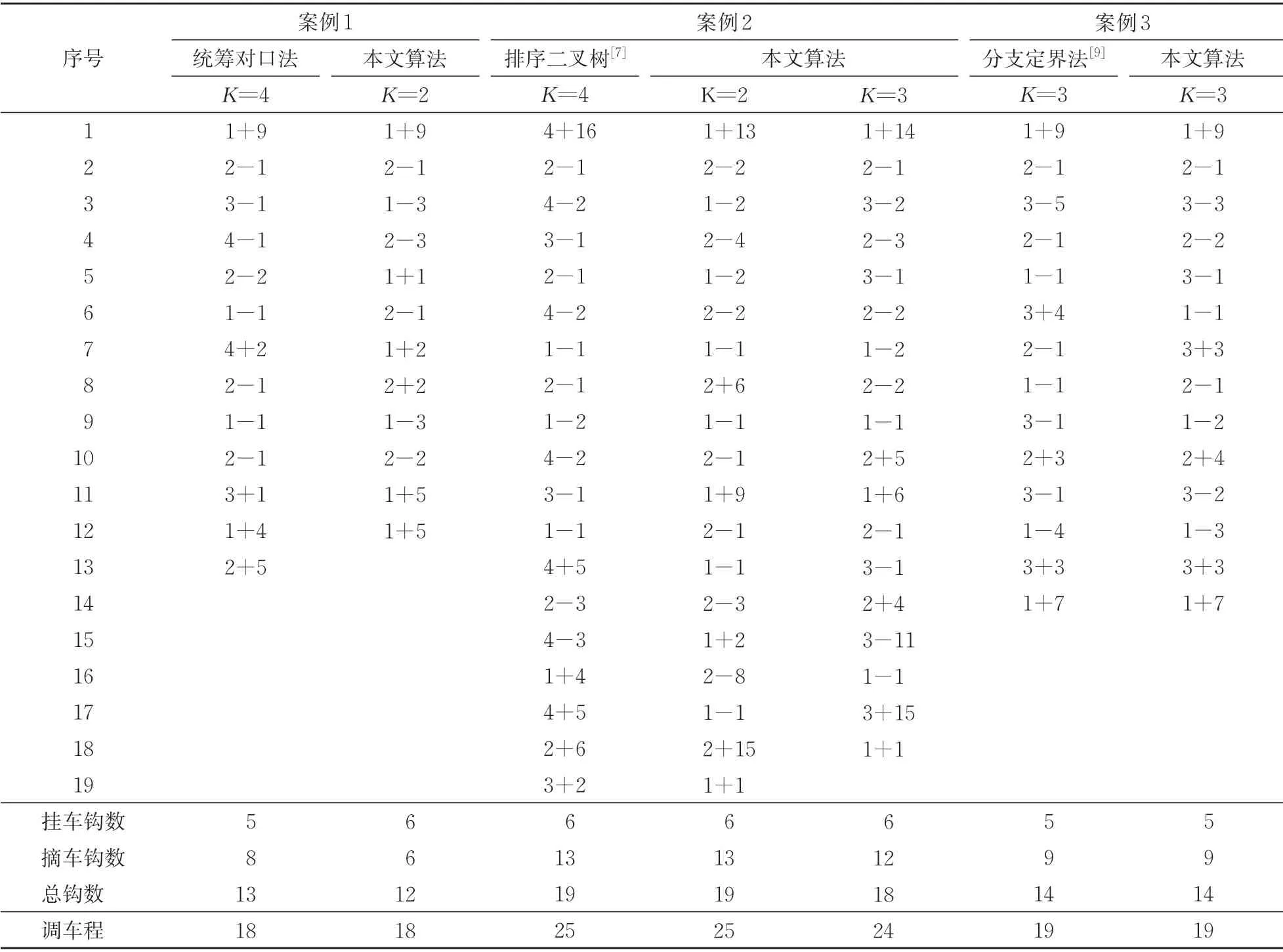
表5 本文方法與其他方法得到的調(diào)車作業(yè)計劃表對比
(1)對比分析案例1 和案例2 結(jié)果,可以看出本文方法能在使用更少股道數(shù)量情況下得到優(yōu)于統(tǒng)籌對口法及排序二叉樹算法的調(diào)車作業(yè)計劃。
(2)案例3 結(jié)果體現(xiàn)出,在相似設(shè)備及工具條件下進行仿真計算,本文方法求解得到的調(diào)車作業(yè)計劃質(zhì)量近似于消逆規(guī)則的分支定界法,且用時僅為53 s,遠遠短于后者的求解時間1 076 s[9]。
5 結(jié) 語
本文在結(jié)合表格調(diào)車法、強化學(xué)習(xí)技術(shù)和Q學(xué)習(xí)算法的基礎(chǔ)上提出1種摘掛列車編組調(diào)車作業(yè)計劃優(yōu)化方法。將調(diào)車作業(yè)劃分為下落和重組2 部分,通過動作、狀態(tài)和獎勵3要素建立了調(diào)車作業(yè)問題的強化學(xué)習(xí)模型,從而使摘掛列車編組調(diào)車作業(yè)優(yōu)化問題轉(zhuǎn)化為對下落方案的尋優(yōu)問題。為求解該模型,改進Q學(xué)習(xí)算法,以最小化調(diào)車程為目標(biāo)建立起待編車列與最優(yōu)調(diào)車作業(yè)計劃之間的映射關(guān)系,智能體學(xué)習(xí)充分、即累加Q值達到收斂狀態(tài)時,即可得到最優(yōu)的調(diào)車表及相應(yīng)的調(diào)車作業(yè)計劃。3 組算例分析驗證了本文方法的合理性和有效性,相較于統(tǒng)籌對口法和排序二叉樹法,本文方法使用的股道數(shù)量更少、調(diào)車作業(yè)計劃更優(yōu);相較于分支定界法,本文方法可在更短時間內(nèi)求解出質(zhì)量近似的調(diào)車作業(yè)計劃。這證實了本文方法有助于提高車站調(diào)車作業(yè)計劃編制的智能化決策水平。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37