基于WSN 的多金屬礦井下人機定位系統設計
2022-02-12 05:51:30杜富瑞陳國良谷寶平祝代偉張元生
金屬礦山 2022年12期
關鍵詞:信息
杜富瑞 陳國良 谷寶平 祝代偉 戰 凱 張元生
(1.礦冶科技集團有限公司,北京 100160;2.金屬礦山智能開采技術北京市重點實驗室,北京 100160;3.西藏華泰龍礦業開發有限公司,西藏 拉薩 850000)
礦業為工業和農業提供了源源不斷的原材料和輔助材料,是現代化經濟體系中不可替代的基礎產業[1],是我國國民經濟穩定發展與國家安全的重要支柱。隨著各種礦產資源因經濟發展而不斷消耗,深井開采及高海拔開采是未來資源開采的發展方向。在深井開采及高海拔礦山開采過程中,面臨高地應力、高溫、缺氧等復雜危險環境,實時獲取井下人員及車輛的高精度位置信息,是實現井下人員日常考勤、危險區域預警、災后救援規劃、人機運動軌跡跟蹤的必要條件。礦山井下人員及車輛高精度定位系統是礦山安全生產的重要基礎[2]。傳統的受限空間人機定位系統中,主要是利用射頻識別(RFID)或紫峰(ZIGBEE)技術[3-4]。在射頻識別定位系統中,主要是通過在井口、岔路口、采場等場所安裝射頻識別卡,實現對井下人員統計及運動軌跡的跟蹤;紫峰定位系統是利用布設在巷道兩側、人員隨身佩戴及安裝在移動裝備上的通信節點組網實現人員和裝備的定位及軌跡跟蹤。紫峰定位系統適用于短距離和低速率下的定位,具有傳輸帶寬低、抗干擾性差、信號衰減快、系統響應不高的不足。本研究結合中國黃金華泰龍多金屬礦的特殊工程背景,利用超寬帶通信技術(UWB)、大數據(BIG DATA)、高精度地圖(GIS)技術,搭建了井下人機定位無線傳感器網絡,實現了井下人員及車輛高精度位置信息的實時感知。基于實時位置信息,實現了華泰龍井下人員考勤、運動軌跡跟蹤、安全區域管控。同時,將人機實時位置信息數據流與礦山生產大數據流有機融合,為行為管控、車輛無人駕駛和科學調度等礦山智能化建設提供實時高效的數據支撐。
1 基于超寬帶通信技術的無線傳感器網絡
超寬帶通信技術(UWB)是由美國聯邦通信委員會(FCC)規范的可免授權使用的無線通信技術[5],可以為停車場、地下金屬礦巷道、圖書館、大型物流存儲倉庫等密閉受限空間提供高精度定位服務。超寬帶通信技術工作頻帶范圍為3.1 ~10.6 GHz,與現有無線電帶寬資源互不沖突,且信號帶寬可達1 GHz。由于UWB 是通過不基于載波的ns 至μs 級的非正弦波窄脈沖實現數據傳輸,具備功耗低、輻射小、傳輸速率高、抗干擾能力強、功率譜密度低等諸多優良技術特性。
無線傳感器網絡(WSN)是現代物聯網的核心組成部分,融合了智能感知、微電子及網絡通訊等多項先進技術[6]。WSN 由大量靜止或移動的傳感器節點構成,它們以無線通信的方式自組成一個多跳的無線網絡,在此網絡覆蓋的區域內實現信息的感知、采集、處理及傳輸等工作[7]。WSN 主要由傳感器節點、匯聚節點及管理節點組成,傳感器節點負責感知空間環境信息(位置、溫濕度、振動、音視頻等),并將感知信息實時傳送給匯聚節點;匯聚節點接收由傳感器節點發來的信息后,將信息進行篩選、分類、歸集并轉發至管理節點;管理節點接收匯聚節點數據信息,與后臺高精度地圖進行融合并展示。
將UWB 模組嵌入到無線傳感器網絡節點中,構成UWB 無線傳感器網絡節點。UWB 無線傳感器網絡節點其主要由感知單元、處理單元、UWB 通信單元及能量單元構成。UWB 傳感器節點結構如圖1所示。
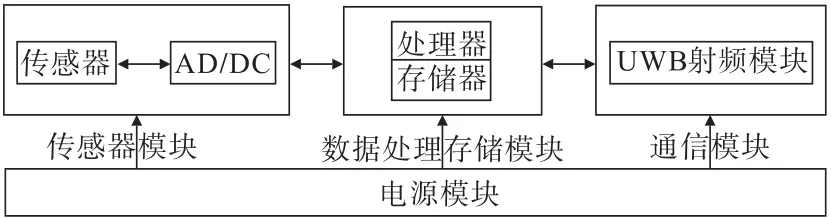
圖1 UWB 傳感器節點Fig.1 UWB sensor node
UWB 通信單元的作用是負責無線傳感器網絡節點數據的外發與接收,可根據具體工作任務進行功能單元的裁剪與移植。UWB 無線傳感器網絡工作時,按照“傳感器節點—匯聚節點—管理節點”的順序進行雙工數據傳輸。融合UWB 的無載波通信及WSN的動態路由技術與傳統的無線傳感器網絡相比,具有功耗低、傳輸速率高、網絡動態自組織、容錯性強等優點。典型的UWB 無線傳感器網絡結構如圖2所示。
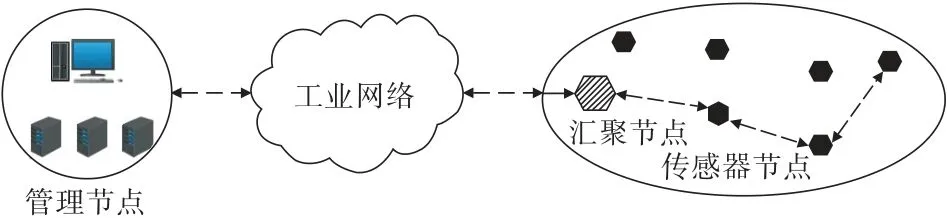
圖2 UWB 無線傳感器網絡Fig.2 UWB wireless sensor networks
2 人機定位系統組成及定位方法
2.1 系統架構
綜合運用UWB 超寬帶通信、高速工業以太網絡、井下高精度地圖及計算機三維展示技術,構建華泰龍多金屬礦井下人員及車輛定位系統。人機定位系統主要由地面控制中心、高速工業以太環網、UWB井下無線傳感器定位網絡組成,井下人機定位系統架構如圖3所示。作為無線傳感器人機定位網絡的管理節點,地面控制中心由數據服務器、客戶端、GIS 融合展示平臺組成,通過收取井下無線傳感器定位網絡發來的定位信息,將信息進行歸集、分析處理并與GIS 平臺融合展示;高速工業以太環網是數據傳輸鏈路,將人機時空定位信息傳送至地面控制中心;UWB井下無線傳感器定位網絡主要包括作為匯聚節點使用的固定于巷道兩側的定位基站以及作為傳感器節點的人員隨身攜帶及固定于車輛上的人機定位節點。
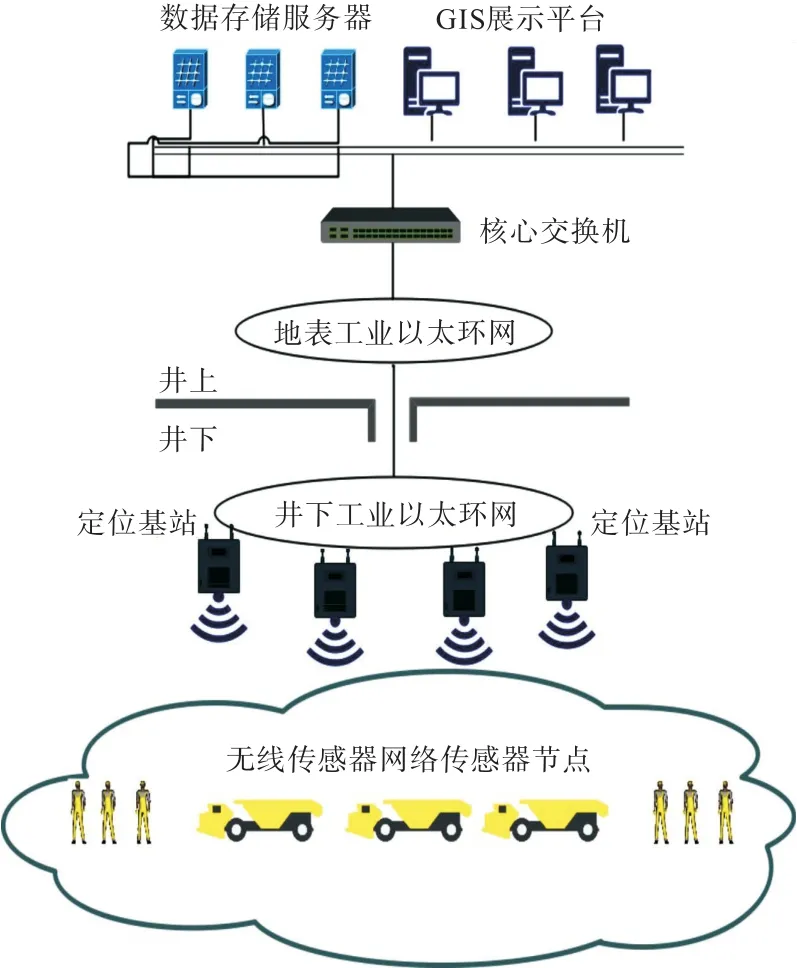
圖3 井下人機定位系統架構Fig.3 Underground personnel and vehicle positioning system architecture
數據通信網絡采用工業以太網及有線與無線耦合技術,整個網絡分為三級拓撲。地表千兆光纖以太環網為第一級有線拓撲網絡,聯接地表定位展示平臺、核心交換機及數據服務器;井下千兆光纖以太環網為第二級有線拓撲網絡,聯接井下定位基站及各自動化控制子系統,具體布置方式為威樂4532 中段—威樂4479 中段—威樂4508 中段—銅山4560 中段—銅山4585 中段—銅山4610 中段—4610 中段斜坡道—威樂4532 中段;人員及運動車輛構成第三級無線拓撲網絡,通過配置UWB 無線傳感器網絡節點實現與第二級網絡中的定位基站數據互傳。該網絡拓撲架構采用有線+無線的方式,具有延展性強、魯棒性好、可靠性高的特點,可有效適應井下惡劣的工作環境。
通過建立基于GIS 技術的井下高精度地圖,將井下人員及運動車輛活動區域坐標化。分布于井下監測區域內的人員及運動車輛傳感器節點,利用UWB無線收發裝置實時將包含位置坐標、身份ID 的數據信息通過網絡內的其他節點以多跳轉發的方式發送到匯聚節點,匯聚節點將接收到的傳感器節點數據信息通過有線光纖網絡傳輸至地面控制中心的管理節點。地面控制中心管理節點對接收數據進行清洗校正、聚類統計、高精度地圖GIS 平臺融合,從而展示井下人員及車輛的時空分布,監控人員及車輛的運動軌跡,實現井下人員及車輛的高精度實時定位。
2.2 定位模型及方法
無線傳感器網絡定位是利用WSN 中已知節點的位置信息,通過定位模型解算出網絡中未知節點的位置信息[8]。在井下無線傳感器網絡中,固定于巷道兩側的定位基站位置信息已知,稱為錨節點;人員及車輛傳感器節點位置信息未知,稱為傳感器節點。要確定節點的位置信息,首先應獲取錨節點與傳感器節點之間的距離信息。現有無線傳感器網絡節點測距方法主要有信號強度測距法(RSSI)、到達時間差(TDOA)、到達角度(AOA)、到達時間(TOA)等方法[9-10]。
在各類測距方法中,RSSI 測距方法依賴信道參數模型和定位基站至傳感器節點的距離,且不能充分利用UWB 的大帶寬特性;AOA 需配置專門的天線陣列,不適合狹窄井下人機定位環境;TDOA 測距方法需要保證所有基站之間嚴格的時鐘同步,這需要增加額外的硬件設備和算法開銷。基于UWB 無線通信具有高帶寬、時間分辨率高的特性,選擇TOA 測距方法。
圖4所示為TOA 測距方法的測距流程,信號由傳感器節點發起,在t0時刻向基站節點發送通信請求信息幀Frame1,基站節點t1時刻接收到信息幀;基站節點經過Tdelay1時長延時后在t2時刻向傳感器節點發送回傳信息幀Frame2,傳感器節點在t3時刻接收到信息幀。傳感器節點經Tdelay2時長延時后在t4時刻向基站節點發送Frame3 信息幀,基站節點在t5時刻接收到信息幀。有如下計算公式:
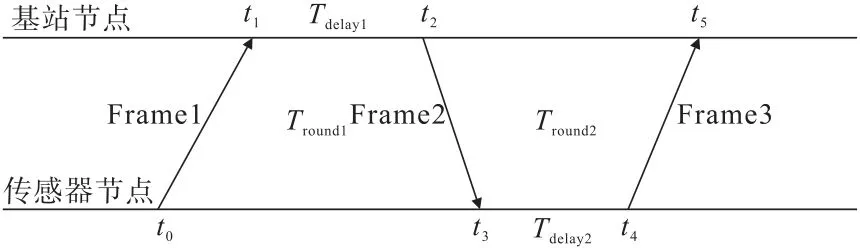
圖4 TOA 測距流程Fig.4 TOA ranging process
式中,TF為電磁波在傳感器節點與基站節點之間的飛行耗時測量值。
井下受限空間受巷道結構、生產設備、環境粉塵等影響,有著不同于地面空曠環境的復雜性和特殊性。在實際無線傳感器網絡測距過程中,存在非視距時延、多址干擾、多徑效應等現象,影響測距精度。為了降低噪聲、提高測距精度,利用卡爾曼濾波(Kalman filtering)對測距數據進行處理。卡爾曼濾波利用某一時刻測量值和上一時刻估計值來預測當前值,具有良好的動態跟蹤定位的效果,遞歸計算復雜度低[11-12]。
對于井下無線傳感器網絡定位,傳感器節點的坐標(x,y)和速度是狀態變量,設定狀態向量Xk=[xk,vxk,yk,vyk,Ttrk,vΔk]T。其中,(xk,yk)是傳感器節點的坐標,(vxk,vyk)是傳感器節點的速度。卡爾曼濾波的狀態方程和觀測方程分別為

式中,Xk為k時刻系統狀態的估計值;F、G分別表示狀態轉換矩陣和噪聲耦合矩陣;H為測量轉換矩陣,H=[1,0],Mk為均值為0、協方差為Qk服從獨立多元正態分布的過程噪聲,Qk~cov(Mk);Nk為均值0、協方差Rk服從獨立多元正態分布的觀測噪聲,Rk~cov(Nk)。
其標準卡爾曼濾波過程為
式中,Pk,k-1和Pk為預測協方差矩陣;I為單位矩陣;Kk為卡爾曼增益矩陣;Rk為觀測噪聲協方差矩陣。
由增益矩陣可知,當Rk噪聲增大,卡爾曼增益Kk相應減小。根據觀測方程(5),Nk=Zk-HXk,Nk的協方差矩陣Rk=HPk,k-1HT。若基站與傳感器節點之間不存在遮擋、電磁波直線傳播,Nk服從均值為零的高斯分布;但井下實際環境中遮擋物較多,受多徑效應和非視距因素影響較大,Nk服從均值Nk=Zk-dk的高斯分布;dk為基站節點與傳感器節點之間距離的實際測量值。
3 功能實現
利用井下高精度地圖及計算機三維展示技術,搭建華泰龍多金屬礦井下人員及車輛定位系統,主要功能如下。
(1)監測井下人員及車輛的時空分布。在地面控制中心利用3D GIS 平臺實時動態顯示作業人員及車輛分布情況,統計作業人員及車輛數量,監測各作業面人員及車輛的數量,展示人員及車輛的所在位置及運動方向(圖5)。
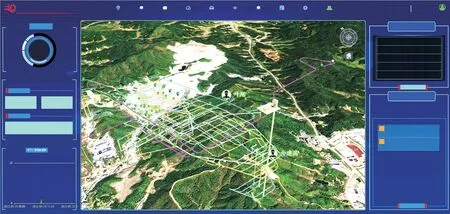
圖5 人員及車輛實時位置Fig.5 Real-time location of personnel and vehicle
(2) 查詢及預警。人員及車輛位置歷史軌跡查詢,人員考勤、特種作業人員行進路線查詢,人員進入重點區域及人員超時、區域超員及缺員預警。
(3)設備狀態在線自診斷。系統設備具有在線自診斷功能,可以實時收集設備狀態信息并上傳,主要包括基站工作狀態(正常、故障)、工作位置、MAC地址及供電狀態等信息。
4 結 語
金屬礦山井下巷道結構復雜、人員車輛流動性大、障礙物多,基于無線傳感器網絡模型構建了華泰龍多金屬礦井下人員車輛定位系統。系統利用超寬帶通信和卡爾曼濾波實現了基站節點和傳感器節點之間距離信息的精確感知,基于距離信息及井下高精度地圖,實現了人員及車輛位置信息的精確測定。系統可實現人員及車輛位置信息實時感知、歷史軌跡查詢及設備狀態在線監測。結合礦山大數據分析、礦山智能調度系統及井下環境感知監測系統,可以實現危險區域管控、安全預警及應急快速救援。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
