自動循環(huán)式挖穴栽植一體機的設計*
2022-02-10 08:37:34李伊凡康之訥謝新杰徐陶祎
南方農機 2022年2期
李伊凡 , 康之訥 , 秦 堃 , 謝新杰 , 徐陶祎
(武漢城市學院,湖北 武漢 430083)
1 概述
植樹造林是我國綠色發(fā)展工作重點之一。在推進“一帶一路”建設的過程中,幫助沿線地區(qū)解決土地荒漠化的問題,具有積極的意義。據2020年發(fā)布的第九次全國森林資源調查結果,全國森林覆蓋面積為2.21億公頃,森林覆蓋率為22.96%,遠低于世界31%的平均水平,尤其是甘肅、新疆等地區(qū),由于人力資源匱乏加之土質原因,森林覆蓋率僅為10%左右[1]。因此,要想實現我國森林資源建設的總體目標,機械化植樹造林是必由之路。
2 自動循環(huán)式挖穴栽植一體機機械結構設計
2.1 整體架構
自動循環(huán)式挖穴栽植一體機的機械結構包括:履帶式驅動行走機構、三葉爪升降式挖坑機構、旋轉輪盤送苗機構、培土機構和澆水機構。將行駛、挖坑、栽植、培土和澆水等多種功能合而為一,機械整體結構如圖1所示。

圖1 自動循環(huán)式挖穴栽植一體機整體結構圖
2.2 履帶式驅動行走機構
全自動栽植一體機的行走機構由履帶底盤、控制電機、齒輪、傳動桿等組成,如圖2所示。
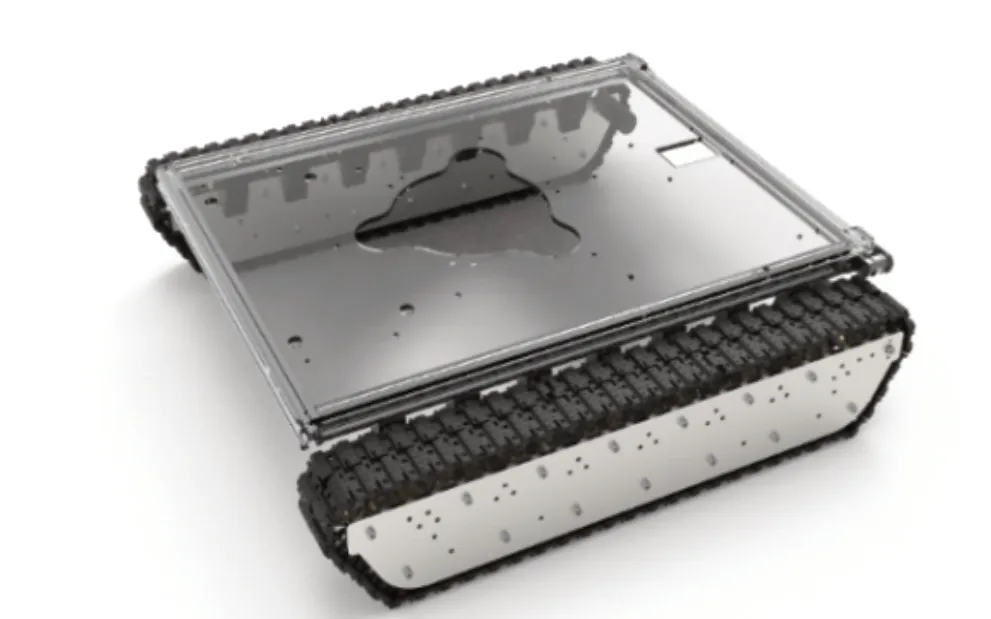
圖2 履帶式驅動行走機構結構圖
考慮到產品主要的工作環(huán)境為荒漠區(qū)沙地或地形崎嶇的林地,因此,選擇了固定式履帶行走機構。該機構由全數字控制的四輪直流伺服電機組成,負責機器人在作業(yè)過程中的行走驅動。其特點是導向輪不作支撐,驅動能力、承載能力和穩(wěn)定性表現更佳,能避免在復雜地貌中行走時因卷入泥土而造成的磨損和失效,從而延長驅動輪和導向輪的使用壽命。并且在雨雪地、泥地、沙地等坡度路面提高地面摩擦力,避免出現車輪空轉現象。
2.3 三葉爪升降式挖坑機構
挖坑機構位于履帶底盤中間,采用三葉爪式升降挖頭,便于挖穴成型和向周圍堆放。三葉爪升降式挖坑機構主要由三葉爪式取土挖穴器、導軌、滑塊、動力輸入軸、伸縮電機、機架連接銷等組成,如圖3所示。
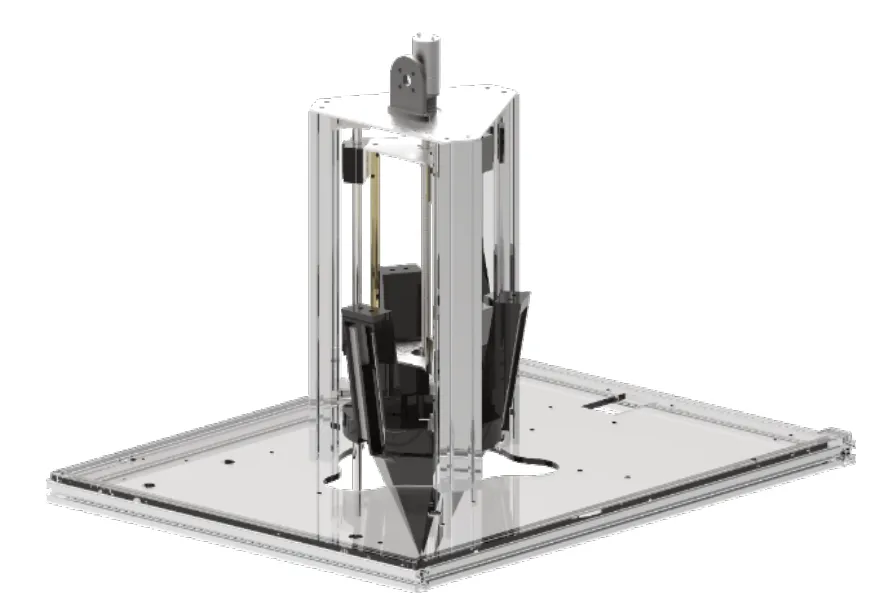
圖3 三葉爪升降式挖坑機構結構圖
三葉爪式取土挖穴器設計為三塊上端大、下端小的三角形狀葉片,有利于挖坑時挖頭順利地刺入土壤。工作時挖頭沿導軌向下滑動以張開的姿態(tài)豎直向下入土,同時對土壤產生剪切作用,在達到一定入土深度后,在伸縮電機作用下各葉片沿滑槽移動,挖頭閉合器閉合,使土壤產生形變而匯集在挖頭內部,隨后沿導軌向上以閉合姿態(tài)豎直出土,完成取土的同時形成孔穴,挖頭隨整機運行移動至成型孔穴前方,再在伸縮電機的作用下向外打開完成排土,隨后復位完成整個挖坑成穴過程。
2.4 送苗栽植機構
送苗栽植機構主要由蝸輪環(huán)、蝸桿、旋轉環(huán)、苗株卡槽、栽植機械臂、電機等部件組成,如圖4所示。
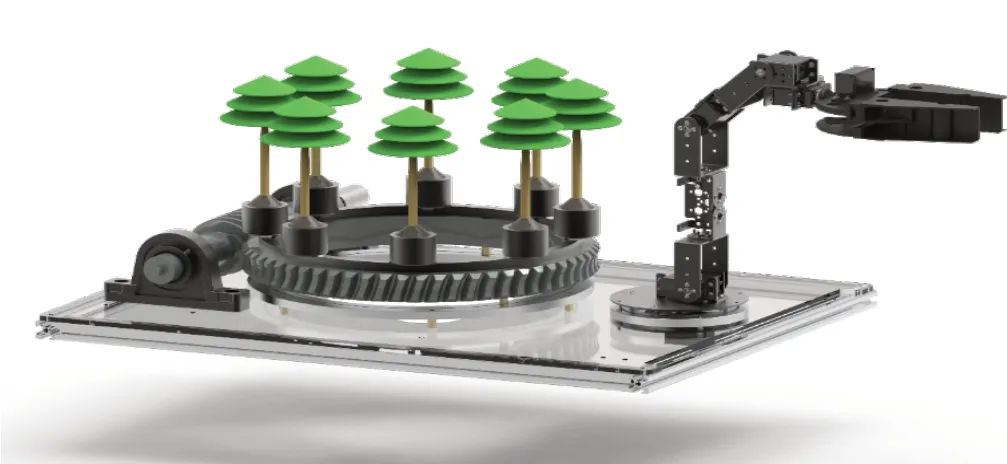
圖4 送苗栽植機構結構圖
運用蝸輪蝸桿的運動特點,創(chuàng)新式設計蝸輪環(huán)結構,底部利用帶有滾珠軸承的旋轉環(huán)與履帶底盤相連,蝸輪環(huán)上根據栽植需要設置6~8個苗株卡槽。工作時,電機帶動蝸桿傳動蝸輪環(huán),使得安裝在環(huán)上的苗株卡槽轉動。安裝在送苗機構后方的6自由度機械臂每次都夾取正前方卡槽中的樹苗,并將其放置到剛剛挖好的坑穴中,完成一次樹苗的輸送,接著蝸輪環(huán)轉動一格,機械臂放置下一棵樹苗,直至蝸輪環(huán)上的苗株放置完畢。
2.5 培土機構與澆水機構
培土機構連接于履帶底盤后部下表面處,由導輪、滑軌、皮帶、連桿式培土塊、培土塊固定件、舵機、電機等組成,如圖5所示。工作時,皮帶帶動培土塊滑動聚攏,再以舵機控制連桿機構,實現培土塊的上下往復踩踏動作,從而完成培土過程中的反復拍土,高效地完成聚攏拍土環(huán)節(jié)。

圖5 培土機構結構圖
澆水機構包括水箱、水管、噴頭和電動水泵,培土過程結束后,主控單元控制開關閥的關閉進而完成澆水作業(yè)。在這個工作過程中,控制系統(tǒng)會根據不同種類樹苗所需水量的不同來控制澆水時間,完成差異化作業(yè)。
3 系統(tǒng)控制結構
本設計方案基于Torobot藍牙模塊、中央控制器Raspberry Pi Ⅲ和舵機驅動板,其整體的控制系統(tǒng)主要由兩部分組成。一部分為運動控制系統(tǒng),由直流伺服驅動電機和高性能多軸運動控制器組成,主要用來完成植樹機器人的行駛、挖坑、栽植、培土和澆水等功能;另一部分為信息傳輸系統(tǒng),主要包括人機接口、多傳感器信息融合單元,比如數據采集、數據處理和環(huán)境監(jiān)測等[2]。系統(tǒng)總體結構如圖6所示。
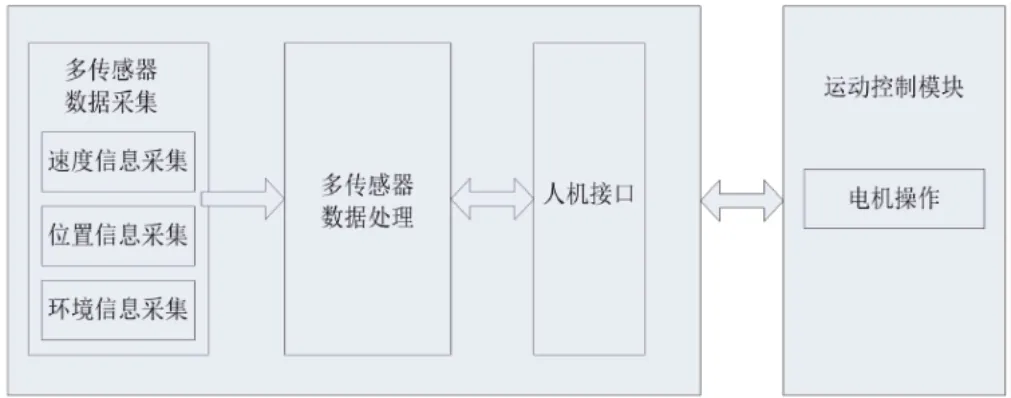
圖6 植樹機器人控制系統(tǒng)總體框圖
為了使植樹機器人具備良好的運動性能,采用了專業(yè)驅動器來實現直流伺服電機的運轉。本設計選用銘朗科技公司的MLD3810電機驅動器[3-4],該驅動器可以很好地控制電機轉速,從而改變機器人的移動速度。該驅動器通過RS232串口與運動控制卡進行通信,完成主控芯片控制、參數調整以及在線監(jiān)測等功能,利用輸入模擬信號和PWM信號控制植樹機器人運動速率,利用輸入脈沖信號和方向信號控制植樹機器人步進模式[5-8]。
機器人上安裝HOKUYO公司制造的URG-04LX 2D型激光掃描傳感器[9],可完成測量工作,測量距離范圍為60 mm~4 000 mm,測量角度為0°~360°,掃描間隔時間為100 ms,用于控制植樹機避障、識別植樹坑穴位置等功能。
本設計選用LP3300型號數字羅盤,羅盤自帶傾角傳感器和磁場傳感器,可以測量植樹機器人的航向、俯仰角等參數,主要用于辨別植樹機的行進方向[10]。羅盤本身具有俯仰角度和翻轉角度的補償功能,當植樹機在斜坡上行駛或遇到障礙時,羅盤的俯仰角和翻轉角輸出數值變化不大。
4 設計創(chuàng)新點
相較于市面上已有的栽植設備,該自動循環(huán)式挖穴栽植一體機有如下創(chuàng)新點:
1)本設計可實現林木栽植過程自動化,且工作過程中可以動態(tài)調整工作參數,可用于代替繁重的人工勞動,可在艱苦的環(huán)境中作業(yè),具有廣闊的應用前景。
2)較之市面上功能較為單一的挖坑機,課題組所設計的全自動栽植一體機將挖坑、送苗、培土和澆水四個步驟集于一體,具有高度的功能集成化,一臺機器能夠完成全部栽植過程。
3)本設計具備間歇式挖穴栽植機構的控制系統(tǒng),可實現行進間間歇式挖穴栽植、智能調節(jié)栽植深度以及精準株距控制等,自循環(huán)完成栽植作業(yè)。
