“海龍號”支持船飽和潛水系統設備安裝定位方法探討
2022-02-08 07:05:34羅玖田劉崇喆余富斌馮仕清
廣東造船 2022年5期
羅玖田,劉崇喆,余富斌,馬 可,馮仕清
( 中船黃埔文沖船舶有限公司,廣州 510715)
1 前言
潛水起源于人們對海洋的利用和開發,人們對潛水技術的探索至今已有5000 年的歷史[1]。提高潛水員水下作業能力最顯著和關鍵方法,就是為水下的潛水員提供充足空氣供應。人們先后使用了呼吸管、呼吸袋(器)、開放式潛水鐘、潛水服、沉箱、混合氣體等為水下潛水員提供空氣,使潛水深度達到了200 ft[1]。然而隨著下潛深度的增加,出現了減壓病、氧氣中毒、氮麻醉等問題,這些問題極大地阻礙了潛水技術的發展。
1957 年,美國海軍上校喬治·F·邦德提出,如果暴露的時間足夠長,機體組織吸收惰性氣體最終會達到飽和狀態[1]。該理論促進了飽和潛水的發展,之后美、英、法等西方國家進行了大量有關飽和潛水的研究和試驗,并在海洋石油開采和其他深海工程中得到了廣泛應用。
飽和潛水是指潛水員在進行潛水作業時,將一定比例的惰性氣體和氧氣混合充滿居住艙,逐步增加或降低艙內壓力,使潛水作業人員身體內各組織的體液中滲入惰性氣體,并達到完全飽和的程度[1]。在相當于作業水深壓力的飽和情況下,潛水員乘坐潛水鐘從過渡艙到達深海潛水作業位置。完成潛水作業后再乘坐潛水鐘回到居住艙休息。只要潛水深度不改變,潛水員的減壓時間與暴露時間無關,而是與潛水深度正相關,因而可極大地提高潛水作業的效率[1]。
隨著我國對海洋資源開發的不斷發展,對大深度飽和潛水的需求也日益提高,在飽和潛水領域也取得了突出成就。我國首次自主的飽和潛水試驗是由交通部上海打撈局于2006 年12 月30 日完成的[2],2014 年1 月26 日我國首次成功實施了300 m 飽和潛水作業,標志著我國深海潛水技術達到了國際先進水平[3]。
2 飽和潛水系統組成
飽和潛水系統一般用于海上飽和潛水作業,多安裝在潛水工作母船上。飽和潛水系統主要組成部分可大致分為4 部分:甲板減壓艙;人員轉運艙;人員轉運艙吊放系統;生命支持保障系統[1]。
(1)甲板減壓艙(居住艙)
潛水員進行飽和潛水工作期間居住和生活的艙室,與外界完全隔絕并保持持續的正壓力, 艙內設有環境控制系統,并配置必要的生活及娛樂設施。
(2)潛水鐘
用于將潛水員送往水下作業地點,或送返甲板減壓艙。
(3)潛水鐘釋放回收系統
包括潛水鐘吊放絞車、潛水鐘轉移行車及滑輪組、臍帶絞車、月池導軌、臍帶等,用于下放和回收潛水鐘。
(4)氣體凈化系統
飽和潛水作業時,居住艙內氦氧混合氣體中二氧化碳含量會隨時間而增加, 需將配備氣體凈化系統對其進行清除。
(5)生命支持系統
包含環境控制單元、熱水單元、呼吸氣體供給單元及黑灰水排放系統等。
(6)應急逃生系統
潛水員在進行飽和潛水作業時是在高壓環境下工作和生活的,如遇到應急情況同樣須在高壓環境下逃生,否則人體將因與外界巨大的壓力差而發生傷亡事故。該系統包含逃生通道、高壓救生艇及回收釋放系統等。
工作母船為潛水設備提供所需的各種能源,以確保潛水設備、生命支持系統和輔助設備的正常運行[4]。
某船廠于2019 年12 月30 日交付了一艘飽和潛水作業支持船——“海龍號”,是迄今為止我國建造作業能力最強的飽和潛水支持船,該船配置了最先進的固定式24 人雙鐘飽和潛水系統,可將潛水員送入水下300 m 深處工作,作業能力處于世界頂尖水平[5]。“海龍號”可同時為24 名潛水員提供飽和加壓或減壓,共由206 專項設備組成,包括生命支持系統,氣體管理分配系統、潛水鐘收放系統、氣體回收系統等,如圖1 所示。
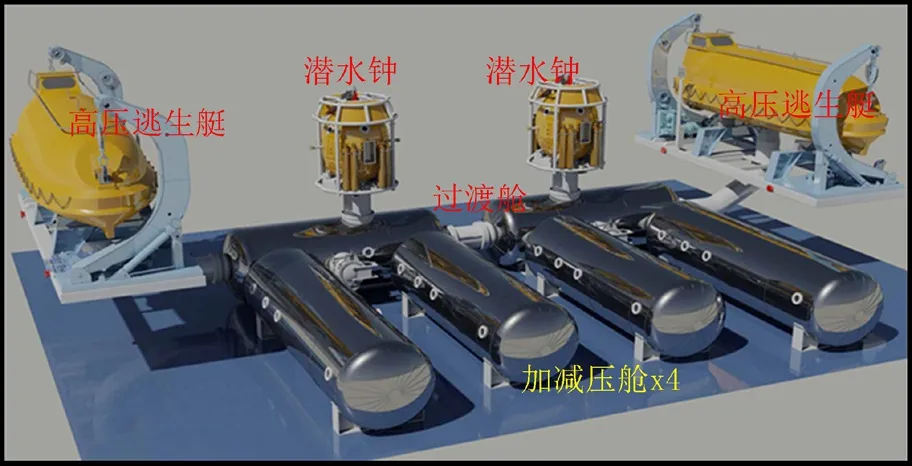
圖 1 “海龍號”支持船飽和潛水系統主要設備
3 飽和潛水設備安裝難度
飽和潛水作業支持船是高科技、高附加值的高端海洋工程裝備,其設備布置密集,安裝精度要求極高,難度非常大。
早期的飽和潛水作業船,多數使用撬裝式潛水設備。某飽和潛水系統構造復雜,分為功能不同的幾個單元,每個單元集成在一個獨立的集裝箱內,在支持船甲板上就位后再通過管線連接構成一套能夠進行潛水作業的有機系統[6]。因撬裝式潛水設備結構緊湊、體積較小,往往不能滿足較大深度的多人潛水作業要求,因此需要開發建造大深度飽和潛水作業支持船,圖2 為“海龍”號支持船飽和潛水系統布置圖。
“海龍號”支持船飽和潛水裝置,主要由甲板居住艙、轉移過渡艙、潛水鐘、生命保障系統四個主要部分,以及相應的吊裝收放設備、應急逃生系統組成:飽和潛水裝置擁有大量高壓裝置及對密封性要求相當嚴格的設備,安裝在搖擺和顛簸的支持船上,除了需要保證船體結構強度外,還需要有正確的設備安裝方法,同時由于飽和潛水裝置的高集成性和設備的特殊性,對設備的裝船工藝提出了很高的要求。
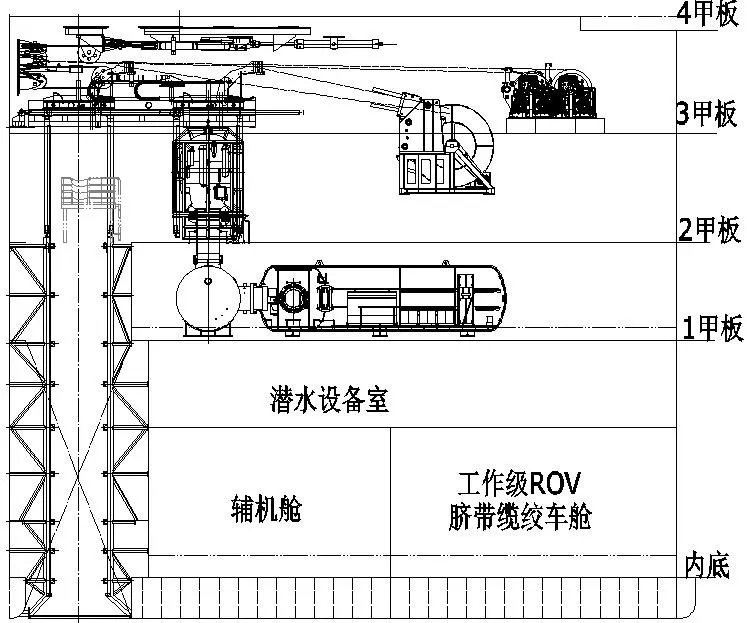
圖 2 “海龍”號飽和潛水系統布置圖
考慮到居住艙、轉移過渡艙及潛水鐘之間的各連接通道都需要承載較大重量,故設備的對接必須是剛性的;另外,潛水員居住和工作環境為高壓狀態,各設備的對接處必須保證密性,需特別注意潛水鐘到轉移艙及居住艙間的安裝對中,確保潛水鐘能順暢地從轉移艙接口處分離進入導軌并與導向罩對接。由此可見,導軌、行車導軌及潛水鐘與轉移艙的對中及定位是整個系統安裝的關鍵所在;行車導軌應以轉移艙接口為基準,因潛水鐘需要能和轉移艙自動對接,所以行車導軌的平行度也需要嚴格控制[7]。
4 飽和潛水系統設備安裝定位方法
考慮到船舶建造環境復雜,作業工序繁多,在整個建造過程中船體結構無法避免會出現一定的變形及安裝誤差,如果按照理論尺寸對設備的基座進行制作安裝的話,將會出現設備基座的尺寸或現場安裝的精度無法滿足設備所規定的安裝精度要求。
4.1 主要設備安裝點幾何關系
要保證飽和潛水各系統設備安裝精度,主要是要保證各設備安裝點位的幾何關系:各甲板月池中心點A1、A2、A3、A4 需保持在一條直線上;轉移艙基站的定位點C1、轉移艙法蘭接口的定位點C2、潛水鐘轉移行車的定位點C3、補償架的定位點C4 也需保持在一條直線上;且A1C1 連線、A2C2 連線、A3C3 連線、A4C4 連線長度相等,并都平行與船舯線CL,如圖3所示。

圖 3 飽和潛水系統主要設備安裝點幾何關系圖
當船體搭載完畢后,可使用精密測量儀器確定好各設備安裝點,避免由于船體結構的變形或理論尺寸的偏差而導致設備的安裝點與理論安裝點發生偏差。
4.2 月池中心線測量
潛水鐘是通過主絞車從月池下放到潛水工作區域的,飽和潛水設備的安裝都需要以月池中心線作為參考,這樣才能保證潛水鐘的收放平順、安全,因此確定各設備安裝點應從測量月池中心線開始,如圖4 所示。
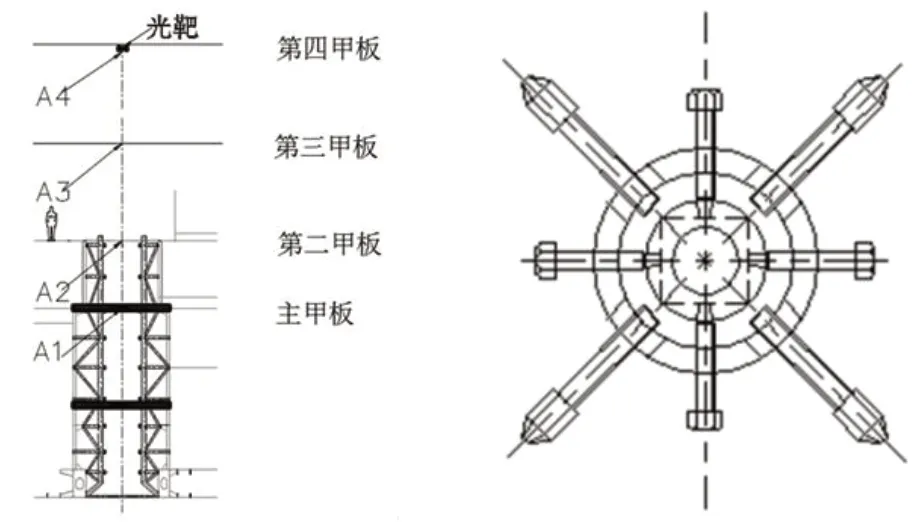
圖 4 月池中心線測量示意圖及中心工裝
船體主甲板搭載完工后,檢查確認兩舷月池相對于船舯線的位置滿足誤差要求。在主甲板及二甲板月池上拉設對角線,確定該月池中心點A1、A2,并在A1、A2 位置放置中心工裝;使用全站儀從主甲板月池中心點A1 向四甲板方向照射,并使激光束穿過A2點;將鋼絲線從主甲板的月池中心點拉設至四甲板月池中心點,并使之與激光束重合,鋼絲線與各甲板月池的交點,分別為各甲板的月池中心點A1、A2、A3、A4;通過鋼絲線的拉設可以直觀的看出各甲板層的月池中心點,便于后續使用月池中心點作為參照點。
4.3 轉移艙及居住艙安裝點確定
潛水鐘在進入月池之前對接的設備是轉移艙,月池中心線確定后即可確定轉移艙安裝點:在主甲板的月池中心點A1 船首方向的預設距離X 處標記用于定位轉移艙基座的點C1,其中A1 和C1 連線平行于船舯線CL;以同樣方法標記用于定位轉移艙法蘭接口的定位點C2,其位于轉移艙的上方,是用于與潛水鐘進行對接的接口,需要非常的精準;對于預設距離X,可以根據設備和月池尺寸的不同進行調整,該距離X 為后續潛水鐘轉移行車需要移動的距離,不可過長,以減少出現誤差的概率。
根據轉移艙及居住艙的對接安裝關系,在主甲板上距離A1C1 連線2 467~2 473 mm 處,畫出兩條平行于A1C1 連線的線TWL1 和TWL2,分別用于定位兩個居住艙的位置,如圖5 所示。
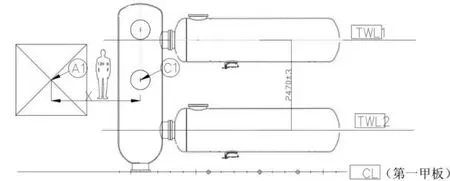
圖 5 居住艙安裝點確定
4.4 潛水鐘轉移行車安裝點確定
“海龍”號的潛水鐘收放系統布置在甲板居住艙上的兩層甲板內,包括潛水鐘行車、潛水鐘主纜絞車、潛水鐘導引纜絞車、臍帶纜絞車、被動波浪補償裝置、滑輪組等裝置。
潛水鐘行車如圖6 所示,主要用來實現潛水鐘從轉移艙對接位置到月池之間的來回移動,行車的安裝精度也是潛水鐘能否順利收放的關鍵。
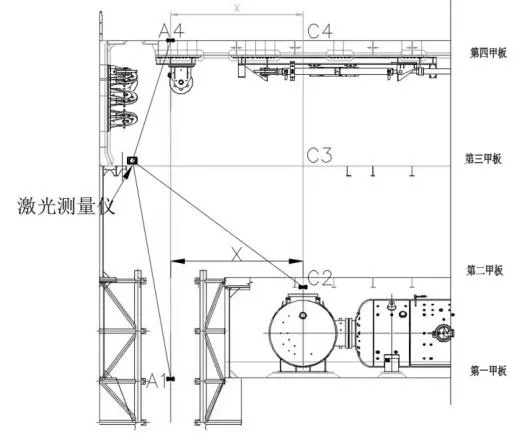
圖 6 潛水鐘轉移行車安裝點確定
將激光測量儀(或全站儀)放置在三甲板,調整激光測量儀的發光軸,使激光測量儀發出的激光經過點A1、A4 和點C2 照射出一個面,照射面延伸至四甲板下表面,形成一條交線,在交線內距離點A4 的預設距離X 處標記用于補償架的定位點C4;然后在C2、C4 之間拉設鋼絲線,鋼絲線與三甲板的交點為潛水鐘轉移行車的定位點C3。
4.5 其它潛水設備安裝點確定
在船舶上確定了以上關鍵設備的安裝位置后,其它次關鍵設備,如潛水鐘收放系統對精度要求相對較低,可根據潛水鐘行車的位置來確定;潛水鐘主纜絞車、潛水鐘導引纜絞車、臍帶纜絞車等絞車的位置,均可按照其系統邏輯關系來布置,同時布置相應的被動波浪補償裝置和滑輪組以及其他輔助設備;逃生通道及高壓逃生艇的位置,則是根據轉移艙位置來確定。
5 結語
海洋對人類生存和發展具有重要意義,我國擁有遼闊的海洋,海洋經濟具有美好的發展前景。隨著海洋經濟的發展,飽和潛水作業不斷增加,飽和潛水作業支持船的建造需要也不斷增長,以滿足海洋工程發展的需要。
飽和潛水作業支持船,是一項復雜的綜合性工程,其設備多且精密,設備的安裝精度是潛水作業成功實施的保證。本文通過“海龍”號300 m 飽和潛水作業支持船的建造,總結了飽和潛水系統關鍵設備的安裝要點,有效避免了由于船體結構的變形和理論尺寸的偏差導致設備的實際安裝點發生偏移的情況,提高了設備現場安裝的精度。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57