基于優化隨機森林的下肢外骨骼步態識別
2022-02-07 09:20:06何志琴
智能計算機與應用 2022年12期
陸 康,何志琴
(貴州大學 電氣工程學院,貴陽 550025)
0 引言
近年來,由于下肢外骨骼在提高人體負重能力以及輔助下肢殘障人士進行康復訓練等方面的廣闊應用前景,對下肢外骨骼的研究逐漸成為新的熱點。
下肢外骨骼在不同的步態階段使用不同的控制模式,因此,步態識別是下肢外骨骼控制系統中的重要環節,以往的步態識別主要以足底壓力傳感器為主要信息來源,使用閾值法進行步態識別,根據設置的閾值將腳跟和腳掌分為觸地狀態和非觸地狀態。Catalfamo 等人[1]和Lopez 等人[2]使用每次實驗中足底壓力的最大值和最小值的計算閾值。Mariani 等人[3]將體重的5%設置為閾值。閾值法在離線分析時效果較好,但當在線使用時,不同步速或不同體重對應的閾值不同,閾值法難以適應這種變化。
隨著機器學習的興起,研究者們提出了各種基于學習的步態識別方法。Park 等人[4]根據GRF 訓練了人工神經網絡(ANN)來進行步態識別。Attal等人[5]使用無監督的多元回歸隱馬爾可夫模型(MRHMM)進行步態識別,平均識別率為83.21%。劉薛勤等人[6]使用多個柔性薄膜壓力傳感器采集足底壓力,利用支持向量機(SVM)進行步態識別,識別準確率達到了90%。然而,由于足底壓力傳感器會經常受到擠壓磨損,導致其壽命有限,并不適用于長期使用。
因此,一些研究者提出了僅使用行走時的下肢角度的步態識別方法。Liu 等人[7]建立了基于多層感知器的步態識別模型,平均相位正確率(CRP)為87.22%。Ma 等人[8]采集了髖膝關節角度,利用核遞歸最小二乘法(KRLS)實現了步態識別,測試平均準確率為86%,但由于KRLS 無法直接完成多分類,需要訓練多個KRLS 模型來實現步態識別。
基于當前的研究現狀,為提高下肢外骨骼步態識別準確度以及識別效率,同時減少傳感器的需求,本文僅使用IMU 測量的大腿、小腿角度和角速度,提出了基于隨機森林多分類能力的步態識別方法,避免了足底壓力傳感器的敏感性以及耐用性有限的問題,并利用隨機森林變量重要性以及皮爾遜相關系數進行輸入特征篩選,提高了步態識別準確度和算法的運行效率。
1 相關原理
1.1 隨機森林
隨機森林是一種經典的集成學習算法,具有訓練速度快、泛化性較好等優點。該算法建立在Bagging 策略上,以大量決策樹作為基礎學習器,在完成分類任務時,訓練多個分類決策樹,通過投票方式確定最終的分類[9]。在本文中,隨機森林將用來根據提取的時域特征進行步態識別。
1.2 特征變量降維
在本文中,使用大腿、小腿IMU 測量得到的角度值作為步態識別的輸入來源,同時為了提高分類精度,使用滑動窗口的方式將一定時間長度的歷史角度作為輸入,但此時存在輸入變量維數較高、變量冗余的問題,因此結合隨機森林的變量重要性和皮爾遜相關系數進行輸入特征降維[10]。
隨機森林具有評估變量重要性的能力,在隨機森林的每個決策樹建立過程中,有大約1/3 的數據樣本沒有作為測試集,稱為袋外(Out-of-bag,OOB)數據,這些數據可以用來評估模型,本文中根據OOB 數據采用平均準確度(Mean -decrease -accuracy,MDA)下降來評估輸入變量的重要性[11],主要步驟如下:
(1)使用OOB 數據計算每個決策樹的分類準確率A1。
(2)對OOB 數據中某一輸入特征加入隨機擾動,再計算分類準確率A2。
(3)計算2 次分類準確率的差值,即:ΔA =A1-A2。
(4)求隨機森林中所有決策樹的差值的平均值、即MDA。
MDA越大,表明對應的輸入變量改變后,隨機森林的準確率下降越大,因此該輸入變量對步態識別準確率的影響越大。
計算出輸入變量的重要性后,還需要剔除其中的相關性較大的冗余特征,Pearson 相關系數是分析變量相關性常用的方法。本文根據Pearson 相關系數,按照2 個變量相關性高時、保留變量重要性大的特征為原則,進行特征變量的降維。
2 數據采集及步態劃分
2.1 步態數據采集及處理
為了采集步態數據,進行了步態數據采集實驗。數據采集設備如圖1 所示。由圖1 可以看到,一名實驗者穿戴數據采集設備進行了數據采集實驗,用粘性綁帶將4 個維特智能公司生產的型號為JY931的九軸陀螺儀固定在實驗對象的大腿和小腿處,采集實驗對象大腿、小腿的角度和角速度。實驗對象腳底穿著足底壓力采集鞋,在每只鞋的前掌和足跟處分別安裝有一個大洋微型壓力傳感器,采集足底壓力數據,傳感器的分布見圖1。數據的采樣頻率為100 Hz,使用截止頻率為20 Hz 的二階巴特沃斯低通濾波器進行數據濾波,消除采集數據中的噪聲和干擾,數據經過處理后被存放在SD 卡中,便于進行后續分析。

圖1 數據采集設備Fig. 1 Data collection equipment
實驗者在跑步機上進行了5 次行走實驗,每次行走實驗中按高速、中速、低速來隨機切換速度,不指定目標速度,切換的速度以及切換時機出于實驗者的自由選擇。為保證采集數據的有效性,每次實驗前都要進行傳感器位置及狀態檢查,確保IMU 牢固綁縛在同一位置,避免位置不同可能帶來的測量誤差。以右腿的步態數據為研究對象,剔除不完整的步態周期數據,以及跑步機啟動停止時的數據,共獲得到104 915 個樣本點的數據。
2.2 步態劃分
在步態識別的實驗中,需要進行步態劃分來生成步態數據對應的標簽。在傳統的步態劃分中,一個步態周期被定義為一次足跟觸地到下一次足跟觸地的時間,隨后根據腳跟和腳掌的觸地狀態將步態劃分為腳跟著地(Heel Strike,HS)、平地站立(Flat Stance,FS)、腳跟離地(Heel Off,HO)和擺動(Swing,SW),在本文中使用1、2、3、4 作為標簽來對應這4 個狀態,步態劃分的規則見表1。
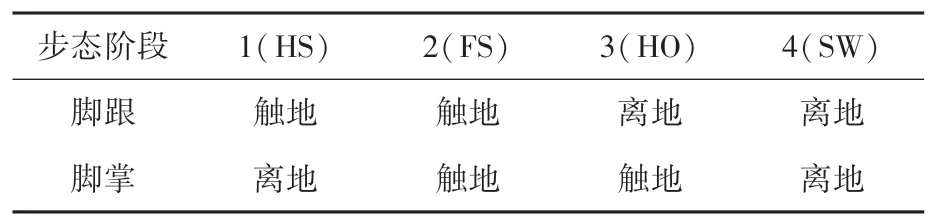
表1 步態劃分規則Tab.1 Gait division rules
劃分步態需要確定腳跟和腳掌的觸地狀態,本文中根據文獻[2]提出的閾值方法來區分腳跟、腳掌的觸地和離地狀態。通過公式(1)計算閾值:

其中,Tmax和Tmin分別為一次實驗中采集到的每個步態周期中足底壓力的最大值、最小值的平均值;α是一個比例因子,用于調整閾值,來補償足底壓力的差異性。
3 實驗與分析
3.1 實驗參數設置
在Matlab R2021a 中設計了本文的步態識別模型,按照7:3 的比例將數據集隨機劃分為訓練集和測試集。實驗分析數據發現輸入窗口越大,步態識別的準確率越高,考慮到算法的耗時問題以及參考文獻[12]的經驗,將輸入窗口設置為17,可以較好地保持算法的實時性,提取窗口內大腿、小腿角度和角速度的時域特征,包括:最大值、最小值、均值、方差和標準差,總共20 個輸入特征變量。隨機森林的樹的棵數和最小葉子節點大小經過網格搜索確定為50 和1。
3.2 評價指標
本文提出的步態識別方法使用準確度(Precision)和召回率(Recall)來進行評估[5],推得的數學定義公式分別見如下:
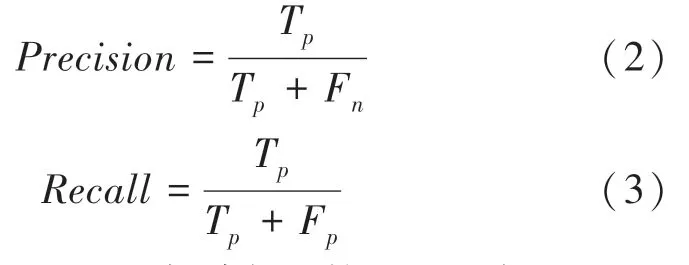
其中,Tp、Fp和Fn分別表示某一預測標簽預測正確的數量、真實標簽被誤分為其他類的數量以及預測標簽預測錯誤的數量。準確度和召回率越高,表明步態識別的效果越好。
3.3 特征變量篩選
輸入變量的重要性如圖2 所示。圖2 中,輸入量編號1~5 表示大腿角度的最大值、最小值、均值、方差和標準差,6~10 表示大腿角速度的最大值、最小值、均值、方差和標準差,編號11~20 表示小腿對應的輸入量。從圖2 中可以看出,所有輸入變量的重要性都大于1,都具有一定的重要性,最高的3 個變量編號為6、8、9 分別對應大腿角速度的最大值、均值、方差。

圖2 輸入變量的重要性Fig. 2 Importance of input variables
對這20 個輸入變量計算Pearson 相關系數,圖3 為輸入變量的相關系數的部分結果。由圖3 可以看出,部分變量之間存在較大的相關性,根據2 個變量相關性高時、保留變量重要性大的特征為原則,最終篩選出來9 個輸入變量,編號分別為1、2、4、6、7、9、13、15、19,大大降低了輸入變量的維數。
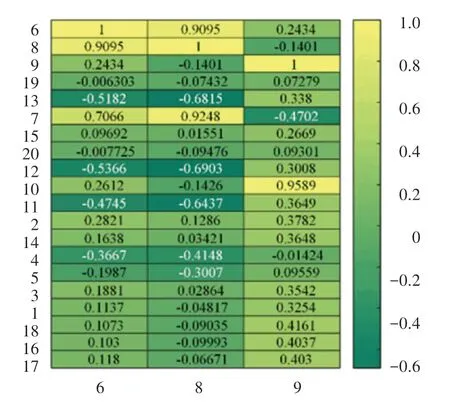
圖3 部分輸入變量的Pearson 相關系數Fig. 3 Pearson's correlation coefficient for a subset of input variables
3.4 仿真實驗
為驗證本文方法的性能,使用篩選前后的特征分別訓練隨機森林,并將文獻[8]的一對多支持向量機(SVM)作為對比,在驗證集上的步態識別的準確率及總預測時間見表2。由表2 分析可知,本文方法的步態識別準確率達到了93.2%,略低于使用全部特征的隨機森林,與一對多SVM 相比準確率提高了3.8%,文獻[4]以90%識別率作為評價步態識別方法能否用于實際步態識別的閾值,因此本文方法可以用于步態識別。此外,本文方法在測試集上的總預測耗時也是最低,有助于提高步態識別的實時性。
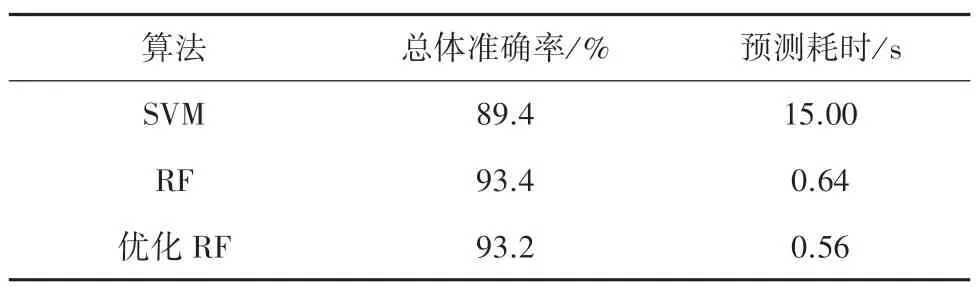
表2 步態識別方法對比Tab.2 Comparison of gait recognition methods
本文方法在測試集中取得的步態識別混淆矩陣如圖4 所示。由圖4 可以看到,矩陣的最右一列為準確度,最下一行為召回率。數據表明,對標簽4、即擺動態的識別效果最好,準確度達到了97.9%,對標簽2、即平地支撐的識別效果最差,可能是由于支撐態時大腿、小腿角度變化較大,造成識別困難,并且支撐態的樣本也較少,不利于算法識別率的提高。圖5 則為SVM 和本文方法對部分樣本的步態識別結果。

圖4 測試集步態識別的混淆矩陣Fig. 4 Confusion matrix for test set gait recognition
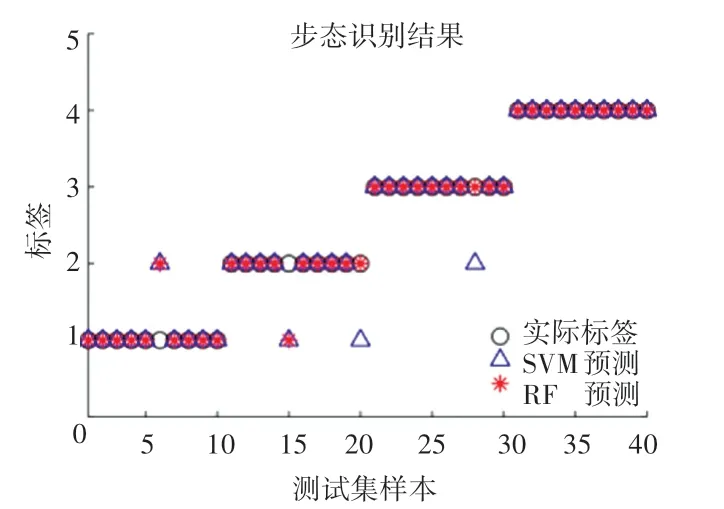
圖5 部分樣本的分類結果圖Fig. 5 Classification results for parts of the samples
4 結束語
針對足底壓力傳感器在下肢外骨骼步態識別中的耐用性較差的問題,設計了僅使用IMU 信號的步態識別方法。使用隨機森林設計了步態識別模型,并且結合隨機森林變量重要性和Pearson 相關系數進行了輸入變量篩選。
仿真結果表明,本文方法的識別準確率高、耗時少,為研究下肢外骨骼的步態識別提供了新的思路與參考。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
建材發展導向(2021年13期)2021-07-28 07:14:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:02
中國生殖健康(2020年4期)2021-01-18 02:58:26
甘肅教育(2020年21期)2020-04-13 08:09:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2018年4期)2018-11-06 07:12:30
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55