大型機場場面交通擁堵狀態等級預測
2022-02-06 04:51:00徐川朱新平瞿菁菁陳洪浩
科學技術與工程 2022年35期
徐川, 朱新平, 瞿菁菁, 陳洪浩
(中國民用航空飛行學院空管學院, 廣漢 618300)
場面擁堵是指場面交通系統資源供給無法滿足某一時段內持續增長的航空器使用需求,以致出現的航空器場面滑行速度下降、時走時停,甚至排隊等待的現象。場面擁堵會直接影響機場運行安全和效率。一直以來,科學治理場面擁堵是飛行區運行管理面臨的難題之一。戰略級場面擁堵治理的一個有效途徑是通過優化滑行道運行方案,以支持管制員科學制定場面管制預案,減少航空器在滑行道上“時走時停”現象發生。通常在機場改擴建后場面滑行道運行方案設計中會重點對此予以考慮。本文研究正是基于此背景,依據設定的滑行道運行方案開展長時間跨度的場面運行擁堵預測,明確潛在的場面擁堵點位,用于反饋完善滑行道運行方案,促進實現戰略級場面擁堵治理。
目前,國內外機場場面研究多集中在擁堵傳播機理、沖突熱點識別、地面延誤研究等,Guepet 等[1]綜合考慮場面滑行路徑問題和跑道調度問題,以同時提高跑道效率和減少滑行時間為目標,提出新的排序方法來提高了跑道的利用效率并減少了滑行時間。Simaiakis等[2]通過實地測試擁堵控制策略,研究如何確定合適推出率以防止機場場面進入擁堵狀態,減少燃料使用并減少滯留航班等待時間。尹嘉男等[3]通過對場面交通運行的諸多特性進行科學分析,并基于這些分析對機場場面擁堵等級及各關鍵指標臨界值進行了分類識別及計算分析。楊磊等[4]通過元胞傳輸理論結合運行實際,建立了宏觀交通流模型,推演了離場交通流密度、離場平均滑行速度和離場交通流量之間的關系,提出了控制與進場率相適應的離場航班推出率是動態調解機場場面離場交通流密度,緩解離場交通擁堵的重要手段。Ali 等[5]計算飛機到達不同滑行道交叉口的時間,基于統計學上的時空模型確定交叉口沖突概率,得到場面沖突系數或熱點的熱度值。上述關于機場場面的研究多是關于場面運行中某一模塊進行深入研究或是通過歷史對場面擁堵情況進行研究分析,在預測方面有所不足。
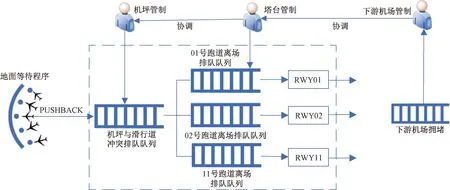
圖1 離場航班交通流擁堵狀態特性Fig.1 Departing flight traffic flow congestion state characteristics
其他領域中,關于城市道路交通擁堵的研究較多,且研究方法大致可分為以時間序列預測方式為代表的線性擁堵預測模型[6],以神經網絡預測為代表并基于歷史交通數據展開的非線性擁堵預測模型[7],以及上述模型的融合應用[8]。從本質上講,擁堵是交通流量動態變化的一種外在表現,擁堵的預測實質上可視為流量預測范疇。在此方面,民航航路和空域流量預測有較多研究。其中,向征等[9]通過領航報和全飛行剖面混雜模型來對關鍵航路點進行流量預測;錢夔等[10]通過對目標群航跡數據聚類,利用反向傳播(back propagation,BP) 神經網絡對目標群航跡進行訓練學習并建立航跡預測模型;馮霞等[11]采用適用于混沌時間序列預測的遺傳算法優化BP神經網絡來預測安檢旅客流量;葛柏君[12]設計基于殘差均值的交互式多模型跟蹤濾波航跡預測算法,并對短期區域飛行流量進行預測和統計;黃龍楊等[13]考慮離場滑行時間的影響因素,建立基于遺傳算法的反向傳播神經網絡模型進行預測;周潔敏等[14]利用隨機森林特征選擇模型,建立彈性神經網絡預測模型,對航班落地延誤時間進行預測。上述研究均能為本文工作提供一定借鑒。
首先通過分析場面擁堵狀態,提出了場面擁堵狀態等級的概念。基于遺傳算法優化的長短時記憶網絡算法(genetic algorithm-long short term memory networks,GA-LSTM)預測跑道頭等待架次,主滑行道延誤時間,總延誤時間。最后,通過模糊C均值聚類算法(fuzzyC-means,FCM)計算機場的場面擁堵狀態等級。
1 場面擁堵狀態特征分析
場面擁堵的發生與演變受多種因素的影響,如本場航班保障能力、上下游機場運行狀態、航路運行狀態等。具體地,從離場航班、進場航班不同的視角來分析場面擁堵的形成過程。
1.1 離場航班交通流擁堵形成過程
圖1所示為在離場航班的擁堵狀態特性。通常,當離場航班的下游目的地機場或所經空域扇區實行流量控制措施時,本地受影響的離場航班會因此滯留在停機位或是場面某些區域,此時會形成上述區域的交通擁堵現象,嚴重時甚至出現跑道頭等待隊列、機動區滑行道或機坪滑行通道的長時間擁堵。此時,需要管制員進行離港排序等管制措施來予以緩解。
1.2 進場交通流擁堵特性
進場航班在落地后會根據管制員的引導指令或引導車引導入位,在其運行過程中可能出現以下堵擁堵現象,這些擁堵現象和離場航班擁堵特性一樣都會在場面運行過程中傳播。
(1)進離港航班滑行路徑交叉導致航空器在交叉口產生沖突,駕駛員從駕駛艙左側看到對方航空器,需要進行停止避讓。如圖2所示,按綠色箭頭滑行航班需要停止避讓。
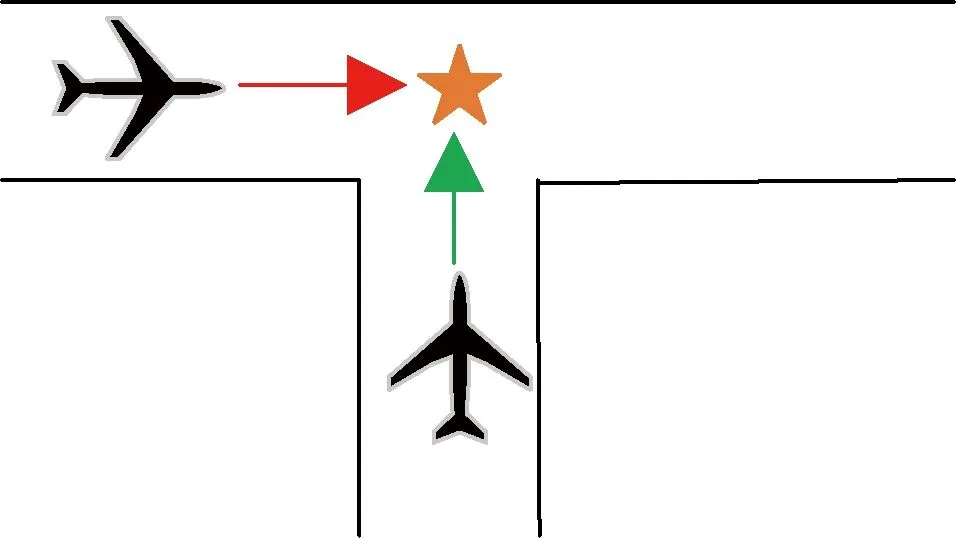
圖2 航空器交叉口沖突示意圖Fig.2 Aircraft intersection conflict schematic
(2)兩架航空器在滑行階段,由于前一架航空器因擁堵傳播造成減速或是轉彎時減速,后一架航空器由于速度較大導致個航空器之間間隔不足會導致后一架航空器減速或是停滯,該現象也會產生場面擁堵,如圖3所示。
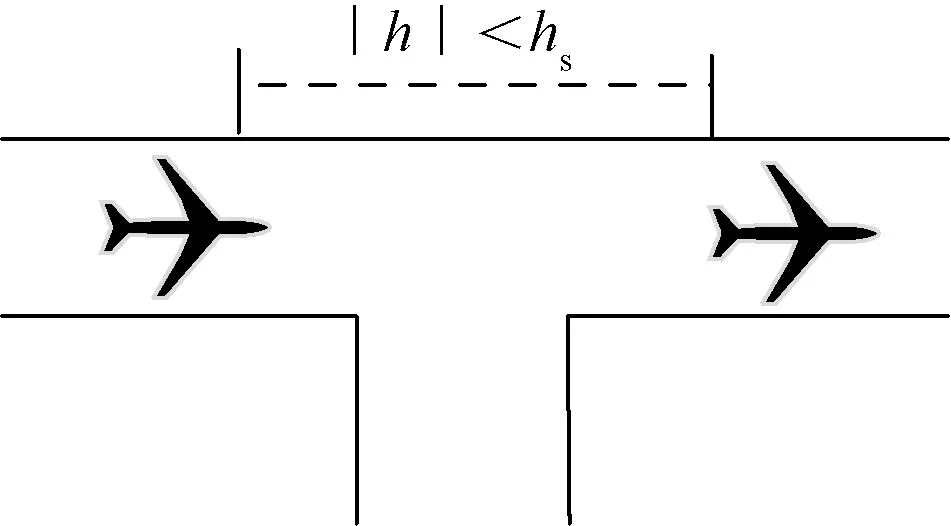
|h|為兩架航空器的間距;hs為安全間距圖3 航空器間安全間隔不足示意圖Fig.3 Diagram of insufficient safety separation between aircraft
2 場面擁堵狀態等級及預測流程
2.1 場面擁堵等級定義
場面擁堵等級是反映機場機動區擁堵狀態的一個指標。該等級的大小反映了不同的場面運行擁堵程度。擁堵等級數值越高,則該時間段的機動區運行能力越差,擁堵情況越嚴重,反之則運行的能力越好。該指標可為管制員提供決策支持,提高場面運行效率,解決潛在的運行安全。
將場面擁堵狀態劃分為四個等級[15-16],具體的等級量化確定方法見本文第4節。場面擁堵狀態等級分類見表1。
2.2 機動區擁堵狀態等級預測流程
科學治理場面擁堵能夠解決飛行區運行管理的部分不足之處,現從戰略級角度提出能應用于多場景的場面擁堵狀態等級預測方法。在機場改擴建或者航班增量后,為管制員科學制定場面管制預案提供依據,減少航空器在滑行道上“時走時停”現象,提高場面運行效率,擁堵狀態等級預測具體流程如下。
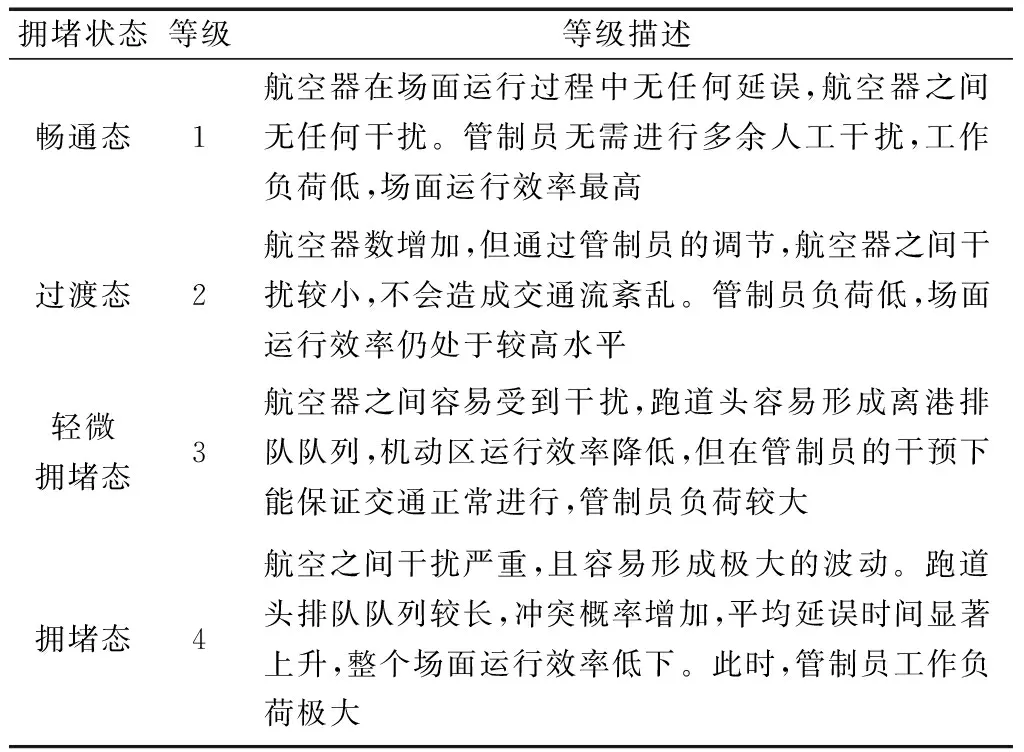
表1 場面擁堵狀態等級
首先,通過實際運行數據或者仿真模擬數據得到機場場面運行數據,對場面擁堵狀態進行分析,通過提取分析數據找出該機場擁堵產生頻繁的重要點(如跑道頭)、線(如主滑行道)、面(如整個機動區),并提取相應的擁堵狀態如跑道頭排隊隊列長度,延誤時間
然后,基于GA-LSTM算法對如跑道頭等待架次、主滑行道延誤時間、機動區延誤時間此類擁堵狀態進行預測,得到下一時段的擁堵狀態。
最后,結合預測的擁堵狀態數據,并基于FCM聚類算法進行機動區擁堵狀態等級分類,得到機動區擁堵狀態等級。具體流程圖如圖4所示。
3 場面擁堵預測及擁堵等級評價模型
3.1 基于GA-LSTM算法的交通擁堵狀態預測模型
遺傳算法是自適應的全局優化搜索算法,遺傳算法的操作過程就是按照一定的方式進行隨機選擇,再這樣的隨機選擇的過程中,使得種群像好的方向進化,操作過程中核心的三部分是選擇操作、交叉操作以及變異操作。通過三種核心操作不斷對問題的接進行迭代優化,在優化過程中不斷產生新的個體,并通過適應度函數提高種群中個體的“質量”,當遺傳算法傳到一定代數后,就可以得到問題較好的解。
長短時記憶神經網絡(long and short-time memory neural network,LSTM)是一種特殊的循環神經網絡(recurrent neural network, RNN),LSTM的控制流程于RNN相似,但是其優化之處在于LSTM中的運算操作具有選擇保存信息或者遺忘信息的功能,其神經元結構如圖5所示[17]。
LSTM利用兩種特有的門來控制單元狀態c的狀態和內容,分別是遺忘門和輸入門。
遺忘門的公式為
ft=δ(Wf[ht-1,x]+bf)
(1)
輸入門公式為
it=δ(Wi[ht-1,xt]+bi)
(2)
式(2)中:Wi為輸入門的權重;bi為輸入門的偏置項,用于表征當前時刻的單元狀態。
輸出門負責控制長期記憶對當前輸出的影響,公式為
Ot=δ(Wo[ht-1,xt]+bo)
(3)
最終輸出為
Otf=ottanh(ct)
(4)
式(4)中:LSTM算法與普通RNN算法的區別在于上述所說的三個門,遺忘門能夠選擇前一狀態中的參數與當前狀態的參數相加得到該狀態的記憶信息。將上一時段的重要點、線、面擁堵狀態數值作為輸入,最后輸出下一時段的場面擁堵狀態數據。在場面運行的階段中,由于固定的滑行路徑以及單通道直線運行,上一階段的擁堵狀態對下一階段的擁堵會產生極大的影響,所以將LSTM算法應用于本文的預測是符合場面運行的實際狀態的。
使用GA-LSTM算法對場面擁堵狀態的跑道頭等待架次、主滑行道延誤時間、總延誤時間進行預測。首先,利用GA算法對預測過程中的時間序列滑動時間窗步長N及LSTM模型的學習率和隱層神經元個數進行優化。然后,將優化參數以及訓練樣本數據輸入LSTM網絡進行訓練及優化,得到GA-LSTM的場面擁堵狀態預測模型,并應用于實際模型當中進行預測,得到預測結果并進行誤差分析,并與LSTM算法所預測的數據相比較。具體流程如圖6所示。
3.2 基于模糊C均值算法的場面擁堵狀態評價
從點、線、面三個維度建立場面擁堵狀態等級評價體系具體步驟如下。
第一步:提取預測所得的場面交通擁堵狀態數據。
第二步:采用FCM算法對場面重要點、線、面三個維度進行交通擁堵評價數據進行聚類,得出相應的聚類中心,對指標進行擁堵狀態的分類。
第三步:建立初始隸屬度矩陣U,計算分類聚類中心Cn和價值函數J。
U=(uni)N×I, ?u∈[0,1]
(5)
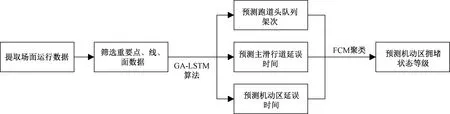
圖4 機動區擁堵狀態等級預測流程圖Fig.4 Flowchart for predicting the congestion status level in the motorized zone
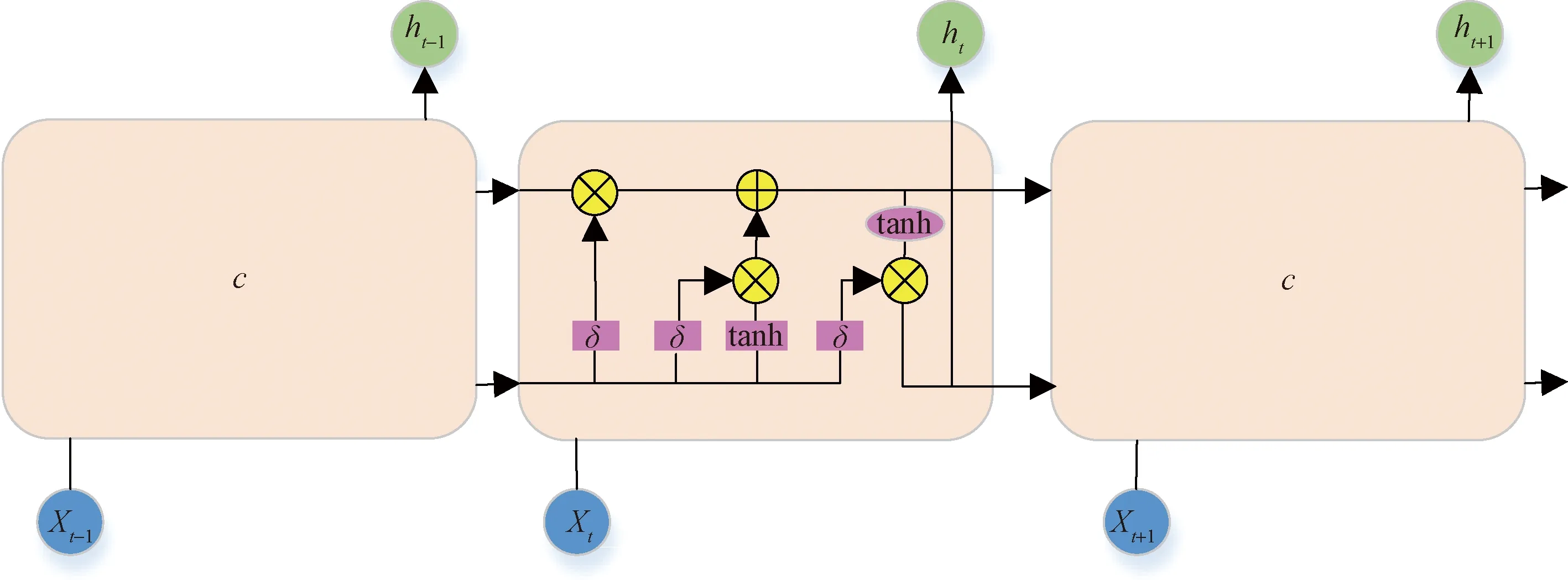
Xt和ht分別代表細胞狀態和隱層狀態;tanh和δ為激活函數圖5 LSTM神經元結構Fig.5 LSTM neuron structure
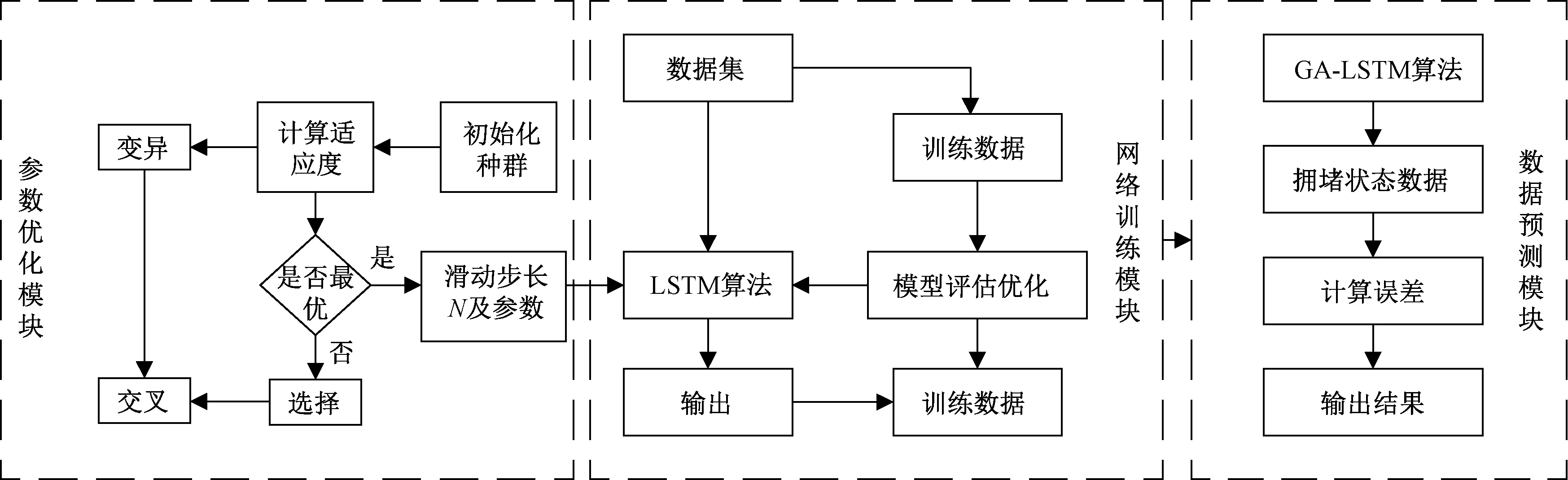
圖6 GA-LSTM算法流程圖Fig.6 GA-LSTM algorithm flow chart
(6)
(7)

(8)
C={C1,C2,C3,C4}
(9)
uni為第i個樣本隸屬于第n個等級分類的程度;I為樣本數;N為擁堵狀態的等級數(本文分為4類,分別為暢通、過渡、擁擠、擁塞);聚類中心矩陣Cn={C1,C2,C3,C4},分別代表暢通狀態、過渡狀態、擁擠狀態、擁塞狀態的中心;m為加權指數;dni為第n個聚類中心于第i個數據的歐氏距離;J反映了聚類的緊密性,數值越小,越精確。
第四步:輸出隸屬度矩陣U和場面交通擁堵的等級。對具體流程如圖7所示。
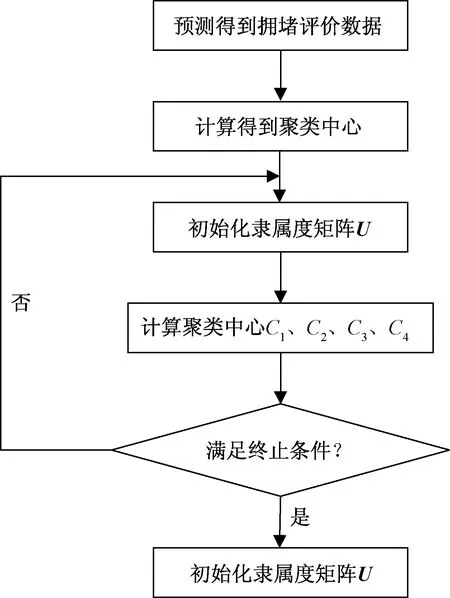
圖7 FCM算法判別交通擁堵狀態流程圖Fig.7 Flowchart of FCM algorithm to discern traffic congestion status
4 算例分析
4.1 數據來源
以天府國際機場為預測目標,該機場共有三條跑道,分別是4 000 m×60 m的01/19號跑道,3 200 m×45 m的02/20號跑道以及3 800 m×45 m的11號跑道,可根據交通流量采取隔離運行模式或者相關平行進近模式。
以2021年9月某5個工作日的天府國際機場的單日航班計劃進行擴容后為最終航班計劃,如表2所示。將航班計劃導入到仿真軟件當中,以 10 min 為間隔,提取每一時段跑道頭排隊架次、主滑行道延誤時間、機動區總延誤時間的數據。并將所得的數據如表3所示,導入Python中進行跑道頭排隊架次、主滑行道延誤時間、機動區總延誤時間的預測。
4.2 預測結果及分析
基于GA-LSTM算法的天府機場未來單日1 000架次流量的場面機動區重要點、重要線、重要面三個維度的跑道頭排隊隊列、主滑行道延誤時間、整個機動區的延誤時間的預測結果如圖8~圖10所示。
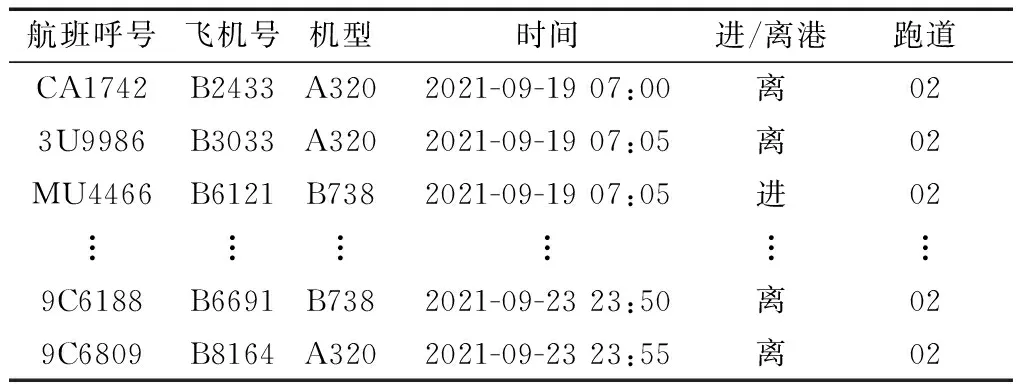
表2 航班計劃相關數據
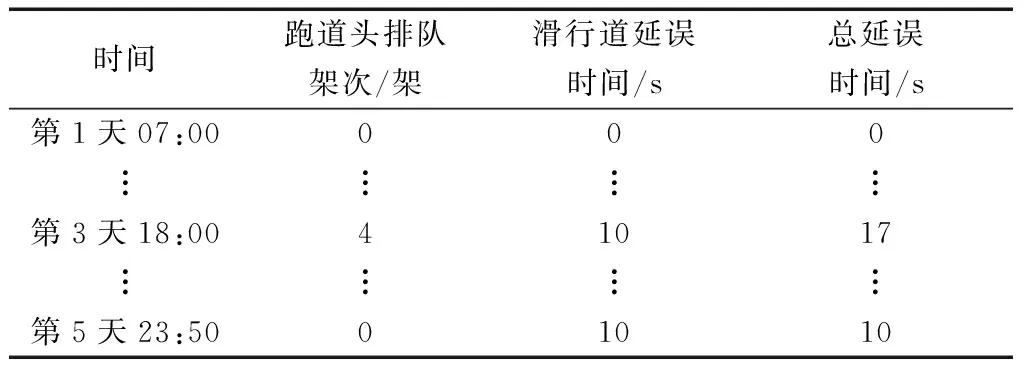
表3 預測模型原始數據導入表Table 3 Predictive model raw data import form
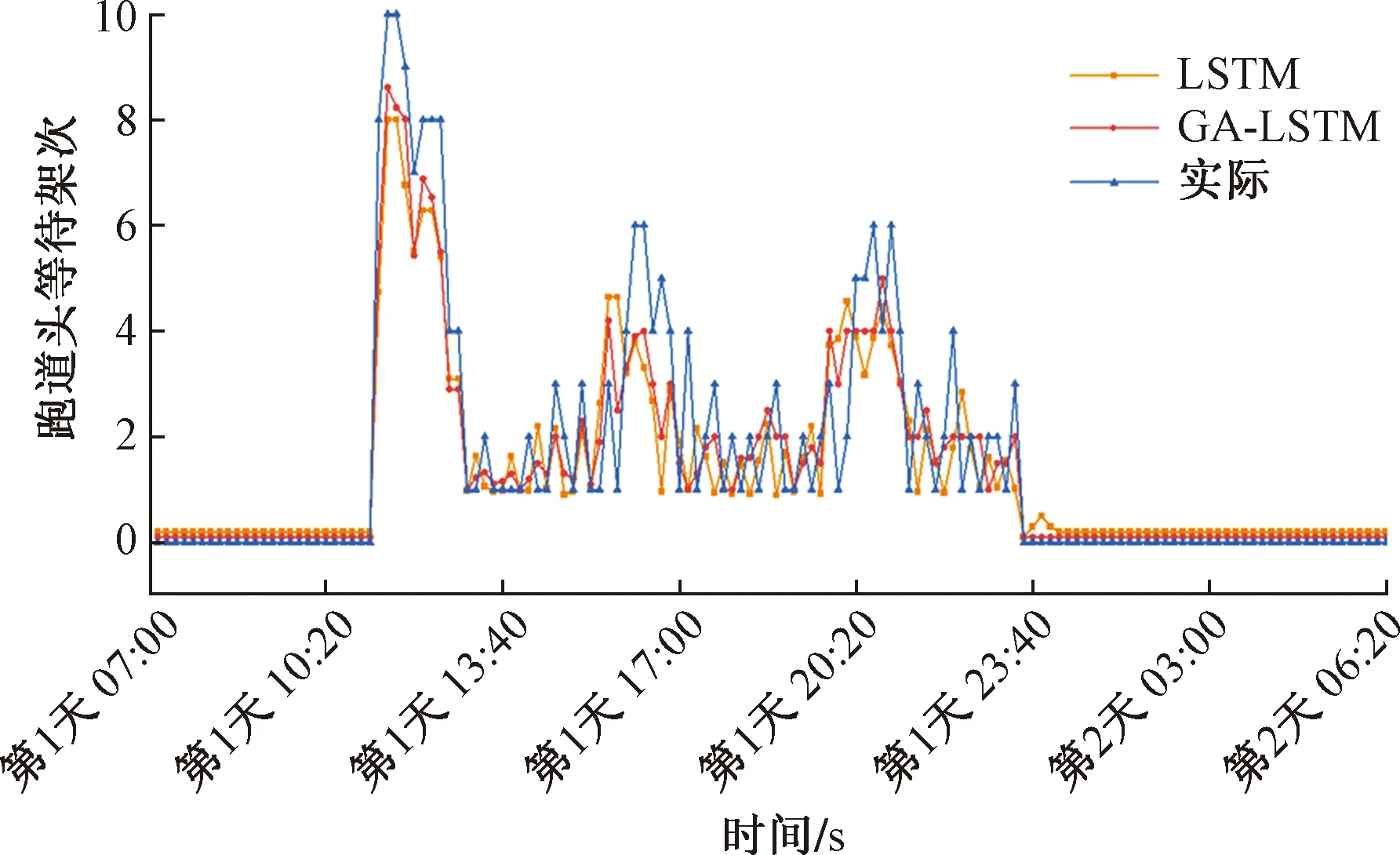
圖8 跑道頭等待架次預測Fig.8 Runway head waiting sortie forecast
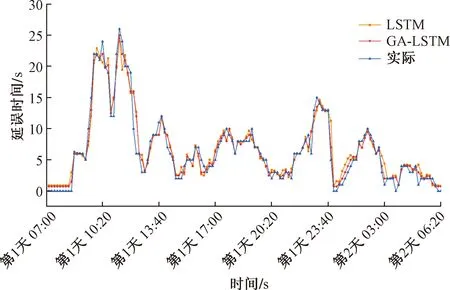
圖9 主滑行道延誤時間預測Fig.9 Main taxiway delay time forecast
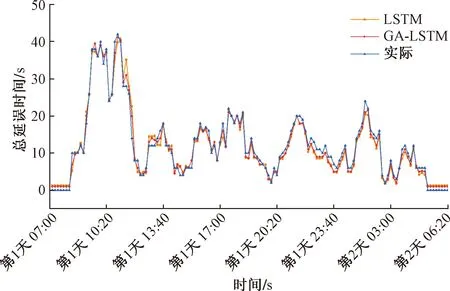
圖10 場面機動區延誤時間預測Fig.10 Field maneuvering area delay time forecast
將前4 d的數據,以10 min為間隔,共計576個樣本作為訓練集,最后1 d的數據作為預測集,以 10 min 為間隔,共計144個樣本,經過GA-LSTM算法的預測和真實值對比如上圖所示,跑道頭排隊隊列預測的RMSE為1.18架;主滑行道延誤時間的預測的RMSE為1.85;整個場面機動區的延誤時間預測的RMSE為2.11。可見基于GA-LSTM算法的擁堵狀態預測的預測結果是較為準確的,且優于LSTM算法。
從圖8~圖10可以清楚地看見該機場早高峰階段, 10:00—11:00的擁堵情況較為嚴重,無論是延誤時間還是跑道頭等待隊列都較大,所以在做戰略級的交通擁堵預測或是管制員工作階段都應對該時段給予足夠的重視,以確保場面運行的效率,保障安全運行。
通過對機場機動區重要點、線、面擁堵狀的預測的數值,首先基于FCM聚類算法對預測出的數值進行聚類中心的計算,基于FCM算法聚類中心的結果如圖11所示,最后用該結果進行機場一天內交通擁堵狀態進行等級評價,時間間隔為10 min,總計為144個樣本,具體等級如圖12所示,可以看出擁堵最嚴重的時段在早高峰10:00—11:00,下午 16:00—17:00。此時離場航班量較大,場面擁堵情況處于峰值,需要管制員預先做好緩解措施,在戰略級層面需要管制部門對滑行方案進行優化,以降低擁堵狀態等級為目標緩解場面運行壓力。
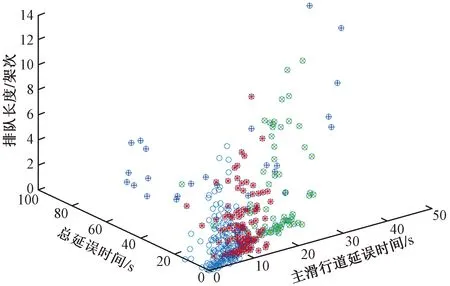
圖11 基于FCM算法的擁堵狀態聚類圖Fig.11 Congestion state clustering map based on FCM algorithm
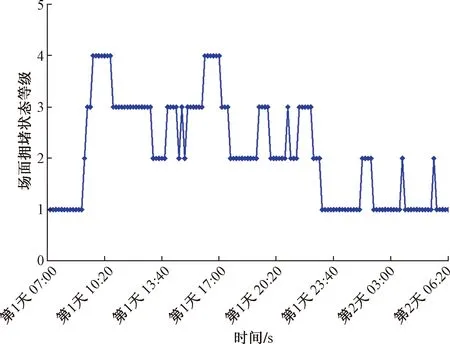
圖12 機場場面擁堵狀態等級圖Fig.12 Airport field congestion status level chart
5 結論
場面運行總延誤時間因為地面延誤程序不能完全反映場面擁堵時間,通過引入主滑行道延誤時間以及跑道頭等待航班架次,并基于GA-LSTM算法及FCM聚類算法建立了一個整體的機場場面擁堵狀態等級預測模型。通過實際數據進行分析證明,發現該算法可以較好地進行擁堵狀態等級預測,為地面管制提供管制決策依據。并且可以觀測到對應擁堵較為嚴重的交叉口擁堵狀態發生時間。有助于管制員預先定位重點關注熱點,通過改變推出時間甚至是重新規劃路徑以達到消除擁堵區域的目的。
但本文是通過直接導入預定的航班計劃進行仿真模擬,與實際運行情況有一定的差距,所以所得的擁堵指數還有一定的偏差。下一步工作應該以以下方面進行:①使用全面的實際數據導入軟件當中進行仿真模擬;②優化擁堵等級分類標準。