基于MEMS傳感器的可校準(zhǔn)電子羅盤實(shí)驗(yàn)設(shè)計(jì)
2022-02-06 09:19:06應(yīng)亞萍倪佳樂張逸寧徐浩東
通信電源技術(shù) 2022年21期
應(yīng)亞萍,王 潔,倪佳樂,張逸寧,徐浩東
(浙江工業(yè)大學(xué) 之江學(xué)院,浙江 紹興 312030)
0 引 言
地球有一個(gè)自然磁場,人們可以通過磁傳感器測量得到當(dāng)?shù)氐拇艌鲂畔ⅲㄟ^地磁場矢量來計(jì)算獲得載體的偏航角,從而確定方向信息。在20世紀(jì)初,科學(xué)家發(fā)明了機(jī)械羅盤,由于材料、工藝和工作原理等方面的限制,這種羅盤的抗振動和抗沖擊能力較低,之后由電子羅盤替代了機(jī)械羅盤。隨著傳感器技術(shù)和集成電路技術(shù)的飛速發(fā)展,微機(jī)電系統(tǒng)(Micro Electro Mechaical System,MEMS)傳感器應(yīng)運(yùn)而生。MEMS傳感器是融合微電子和微機(jī)械加工技術(shù)設(shè)計(jì)的傳感器,能完成傳統(tǒng)傳感器所不能實(shí)現(xiàn)的一些功能,具有體積小、重量輕、靈敏度高、成本低、功耗小和易于智能化等特點(diǎn)。MEMS傳感器取代傳統(tǒng)傳感器,使得電子羅盤的性能和參數(shù)都得到了較大的改善。電子羅盤作為平板電腦、智能手機(jī)和無人駕駛飛行器(Unmanned Air Vehides,UAVs)等產(chǎn)品的基本配置,市場應(yīng)用前景廣闊。因此基于MEMS傳感器的電子羅盤的研究具有現(xiàn)實(shí)意義和實(shí)用價(jià)值
1 電子羅盤的測量原理
1.1 地磁測量基本原理
地球像1塊條形磁鐵,在周圍形成地磁場。由于地理位置的不同,地磁場的強(qiáng)度也不同[1-3]。地球磁場可以通過如圖1所示的模型模擬表示,該模型以條形磁鐵的形式從磁南指向磁北。地磁極不與地理磁極重疊,它們之間有1個(gè)角度叫做磁偏角α。地磁場矢量在1個(gè)固定的位置上可以被分解為2個(gè)平行于該位置水平面的水平磁分量Hx和Hy以及1個(gè)垂直于該位置水平面的豎直磁分量Hz,因此如果把電子羅盤放置在平行于當(dāng)?shù)厮矫娴钠矫嫔希瑒t磁力計(jì)的3個(gè)軸輸出剛好對應(yīng)這3個(gè)分量,而地球磁場在地理坐標(biāo)系中可以被分解為總是指向磁北極的水平分量H0和垂直于地球表面的垂直分量Hg[2]。地磁場H在XY水平面內(nèi)的分解示意如圖2所示。磁方位角的定義是在地理坐標(biāo)系中載體向前方向的X軸投影和磁北方向之間的夾角大小。若地理坐標(biāo)系和載體坐標(biāo)系相重合,那么由磁力計(jì)輸出地球磁場在載體坐標(biāo)系上的Y軸和X軸磁場分量Hy和Hx,由此可推出在理想情況下,水平面內(nèi)的航向角計(jì)算公式為
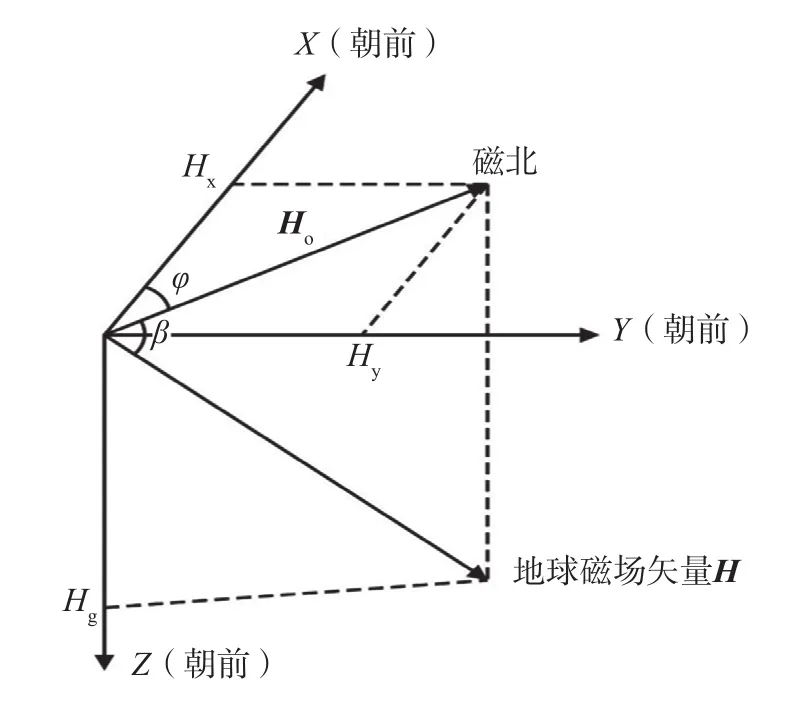
圖2 地磁場H在XY水平面上分解圖

然而,較為常見的情況是載體處在三維空間中,載體坐標(biāo)系不平行于地理坐標(biāo)系[2]。如果地理坐標(biāo)系和載體坐標(biāo)系如圖3所示,載體坐標(biāo)系的坐標(biāo)原點(diǎn)是載體的重心,沿著水平垂直軸向前方向是X軸的正方向,沿著水平軸向右方向是Y軸正方向,向下垂直于水平面的方向是Z軸正方向[2]。地理坐標(biāo)系的原點(diǎn)是地球球體的中心,沿著北極方向的是X軸正方向,沿著地理東的方向的是Y軸正方向,垂直于向下的XY軸平面的方向則是Z軸正方向,同時(shí)兩個(gè)坐標(biāo)系都符合右手定則[2]。載體坐標(biāo)系在運(yùn)動中不斷發(fā)生變化,導(dǎo)致傳感器數(shù)據(jù)相對于地理坐標(biāo)系連續(xù)變化。姿態(tài)角就是載體坐標(biāo)系X、Y、Z軸與地理坐標(biāo)系X、Y、Z軸之間的3個(gè)夾角[2]:即橫滾角γ、俯仰角θ和航向角φ。俯仰角θ定義為載體前進(jìn)方向與其在水平面投影的夾角;橫滾角γ定義為羅盤平面上與前進(jìn)方向垂直的方向與其在水平面投影的夾角。
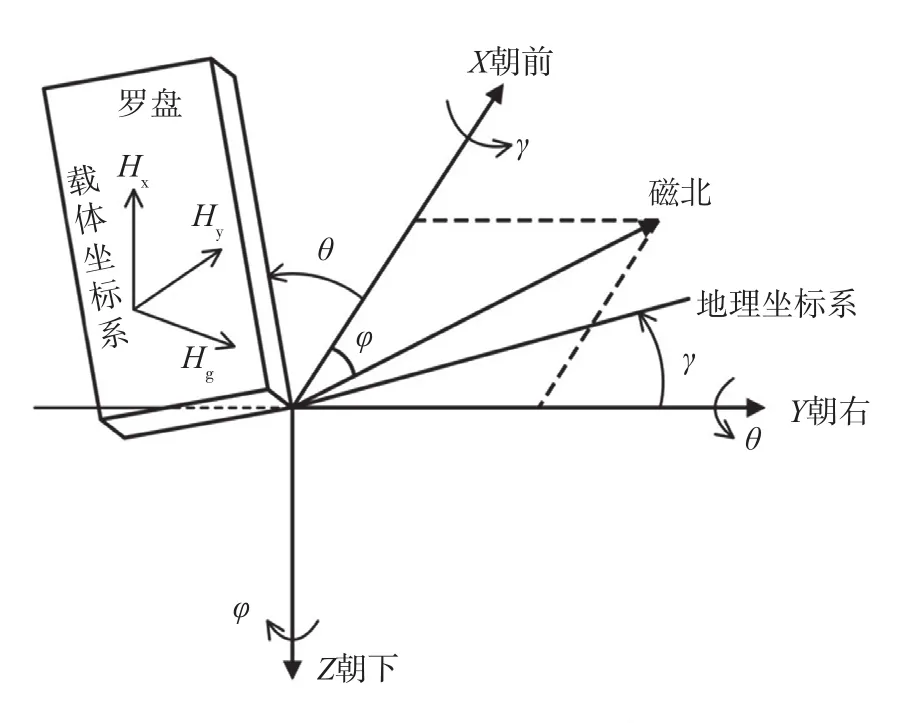
圖3 坐標(biāo)系與相關(guān)角度示意圖
1.2 航向姿態(tài)解算方法
對載體進(jìn)行分析如圖4所示,東北天坐標(biāo)系即OXnYnZn為載體所在的地理坐標(biāo)系,磁傳感器連接到載體,載體坐標(biāo)系為OXbYbZb,同時(shí)地理坐標(biāo)系的原點(diǎn)與載體坐標(biāo)系的原點(diǎn)相重合。那么這2個(gè)坐標(biāo)系每個(gè)軸之間的夾角就是載體的姿態(tài)角,即航向角φ,橫滾角γ和俯仰角θ。
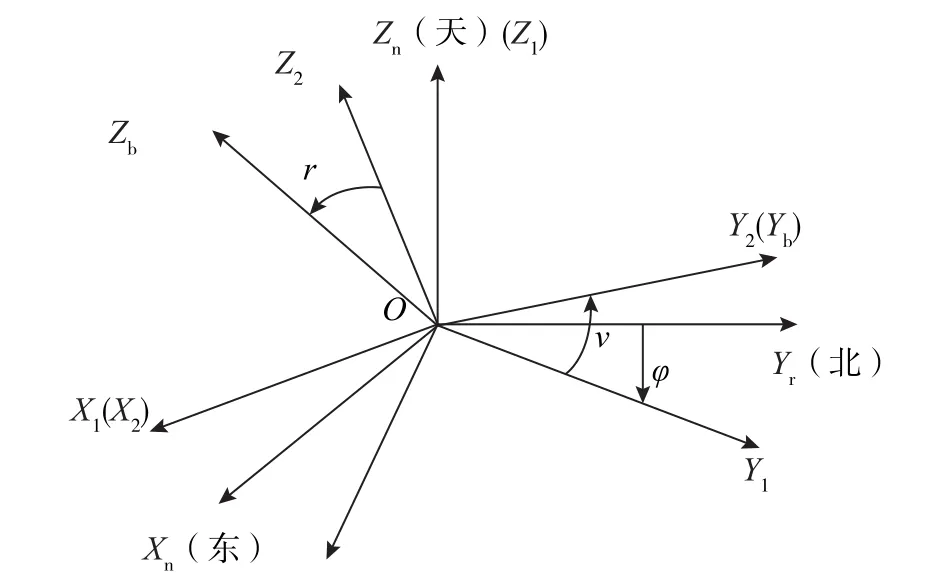
圖4 載體分析圖
地磁傳感器測出地磁場在載體坐標(biāo)系3個(gè)軸的磁場矢量為Xb、Yb、Zb,后將3軸磁矢量通過歐拉角旋轉(zhuǎn)矩陣可求得地理坐標(biāo)系上的3軸地磁分量為

式中:X1、Y1、Z1為地磁場磁場強(qiáng)度投影到地理坐標(biāo)系的值。
則有

知道地磁場在地理坐標(biāo)系的磁場分量,即可計(jì)算得到磁航向角為

橫滾角和俯仰角通過求解載體坐標(biāo)系中3軸重力加速度分量得到。靜止時(shí),地球重力加速度大小就是加速度計(jì)3軸輸出值的平方和。因此,如果加速度傳感器的3軸輸出為(gx,gy,gz),重力加速度在地理坐標(biāo)系上的3軸分量為(0,0,g),則可以得到關(guān)系式

由上述矩陣可解算出

進(jìn)而可得
然而,得到的方位角是載體相對于磁北極的角度。由于地理北極和地磁北極之間存在磁偏角α,而實(shí)際的方位角是載體相對于地理北極的方位角,因此航向角計(jì)算公式為φm=φ+α。需要注意的是,每個(gè)地方的磁偏角不是同一大小,可以根據(jù)國際地磁參考場來得到各個(gè)地方的磁偏角數(shù)值。
2 電子羅盤誤差分析及校準(zhǔn)方法
2.1 誤差來源
通過測量地球磁場矢量來計(jì)算磁北方向與載體前進(jìn)方向之間的角度是電子羅盤測量航向角的原理,但如果周圍有磁性材料,磁傳感器測量地球磁場的方向和大小就會產(chǎn)生誤差,這種磁干擾引起的磁傳感器測量誤差被稱為羅盤誤差。硬磁干擾和軟磁干擾都會產(chǎn)生這種磁干擾[2]。
(1)硬磁干擾。主要是由永久磁鐵等其他硬磁材料產(chǎn)生的相對于地磁傳感器的固定大小和方向的磁場干擾,所以3軸磁傳感器除了檢測到的地磁場外,還在3軸增加了1個(gè)固定大小和方向的磁場。對羅盤來說,磁傳感器的輸出應(yīng)該是平面上的1個(gè)圓,但是由于受到這種硬磁干擾的影響,相當(dāng)于磁傳感器的輸出圓心偏離了原點(diǎn)[1]。
(2)軟磁干擾。主要是由于羅盤里的一些軟磁材料被地磁場磁化產(chǎn)生,從而影響了磁力計(jì)的輸出。軟磁材料磁化后產(chǎn)生磁場導(dǎo)致磁力計(jì)檢測到的磁場方向和大小隨外界磁場的變化而變化,這種干擾不僅會影響磁力計(jì)檢測到的磁場的磁場方向,而且還會嚴(yán)重影響檢測到磁場的大小[3]。所以軟磁干擾補(bǔ)償較為困難,一般在這個(gè)干擾的影響下,磁傳感器的輸出會變成橢圓形
2.2 基于橢圓擬合的羅差補(bǔ)償方法
羅盤軟硬磁干擾可以被橢圓擬合補(bǔ)償方法校正補(bǔ)償。硬磁干擾會使得磁傳感器3軸產(chǎn)生偏移量。磁傳感器的偏移量Xoff、Yoff、Zoff可采用以下方法計(jì)算,把羅盤上磁傳感器的XY軸平面放置在平行于水平面的平面上,勻速旋轉(zhuǎn)羅盤1周,采集磁傳感器的輸出值并計(jì)算出磁力計(jì)X軸和Y軸的最大最小值Xmax、Ymax、Xmin、Ymin;之后將羅盤豎起,使得磁力計(jì)的XZ軸平面平行于水平面,再次勻速旋轉(zhuǎn)1周,采集磁力計(jì)的輸出值并計(jì)算Z軸的最大最小值,記為Zmax和Zmin[4,5]。地磁傳感器的三軸偏移量為
而軟磁干擾的影響會不斷影響磁力計(jì)的輸出,使得磁力計(jì)的輸出由1個(gè)球變成1個(gè)橢球,可以引入3個(gè)標(biāo)定因數(shù)Kx,Ky和Kz來將橢圓擬合成圓形。標(biāo)定因數(shù)計(jì)算所需參數(shù)與計(jì)算偏移量所需參數(shù)相同,也需要磁力計(jì)3軸的最大最小值,將X軸設(shè)為標(biāo)準(zhǔn)軸,設(shè)定X軸的標(biāo)定因數(shù)Kx=1,可求得3個(gè)標(biāo)定因數(shù)Kx,Ky和Kz為

在得到磁力計(jì)3軸偏移量和3個(gè)標(biāo)定因子后,可以通過標(biāo)定因子的比例關(guān)系式將橢圓擬合成1個(gè)圓,圓心通過偏移量被移到原點(diǎn),磁力計(jì)的輸出值變?yōu)镠x1,Hy1,Hz1,可以以求得其數(shù)值大小為

3 電子羅盤的系統(tǒng)設(shè)計(jì)
3.1 羅盤系統(tǒng)設(shè)計(jì)概述
本設(shè)計(jì)基于MEMS傳感器開發(fā),其系統(tǒng)總體框架如圖5所示。系統(tǒng)硬件主要包括微控制單元(Micro Controller Unit,MCU)、三軸MEMS地磁傳感器、三軸加速度傳感器以及有機(jī)發(fā)光二極管(Organic Light-Emitting Diode,OLED)顯示屏。加速度傳感器采集重力加速度矢量G在載體坐標(biāo)系上的3個(gè)加速度分量Gx、Gy、Gz,通過I2C通信傳輸給MCU進(jìn)行處理濾波,俯仰角θ和翻滾角γ通過加速度傳感器測量得到的地球重力加速度矢量帶入公式解算出來。3軸地磁傳感器采集地磁場矢量M在載體坐標(biāo)系上的3個(gè)磁分量Mx、My、Mz也通過I2C送入MCU。MCU根據(jù)濾波后的加速度傳感器數(shù)據(jù)計(jì)算得到俯仰角和橫滾角以及通過橢圓擬合補(bǔ)償和標(biāo)定誤差處理后的地磁傳感器3軸磁分量Mx、My、Mz,經(jīng)過公式進(jìn)行傾角補(bǔ)償和航向角解算,得到穩(wěn)定的姿態(tài)角數(shù)據(jù)。

圖5 電子羅盤的系統(tǒng)框架
3.2 電子羅盤的硬件設(shè)計(jì)
傳感器的性能與羅盤性能密切相關(guān)。本設(shè)計(jì)選擇Bosch公司的BMA456加速度傳感器和AKM公司的AK09918C磁傳感器。這2款都是MEMS傳感器。BMA456具有16位高精度ADC,其噪聲為120 μg/Hz,溫度偏移系數(shù)為 ±0.3 mg/K,尺寸為 2.0×2.0×0.65 mm3,封裝形式為柵格陣列封裝(Land Grid Array,LGA),易于整合到可穿戴設(shè)備中。AK09918C是1款采用霍爾傳感器技術(shù)的可檢測三軸磁感應(yīng)強(qiáng)度的單芯片,采用0.8×0.8×0.5 mm3晶圓片級芯片規(guī)模封裝(Water Level Chip Scale Packaging,WLCSP)形式,內(nèi)置 16 位高精度ADC和高性能數(shù)字處理功能。BMA456加速度計(jì)在8 g量程下的靈敏度為4096 LSB/g,AK0991C磁力計(jì)的靈敏度為 0.15 μT/LSB[2]。
單片機(jī)采用STM32F103,將傳感器采集的數(shù)據(jù)濾波處理后進(jìn)行姿態(tài)解算,并將解算后的數(shù)據(jù)發(fā)送給OLED模塊顯示。
3.3 電子羅盤的軟件設(shè)計(jì)
由于電子羅盤在使用過程中受環(huán)境因素的影響較嚴(yán)重,必須在使用前對本進(jìn)行校準(zhǔn)補(bǔ)償。該設(shè)計(jì)中羅盤的參數(shù)補(bǔ)償是基于橢球擬合方法。羅盤的工作模式分為正常工作模式和校準(zhǔn)模式,其工作過程如下:在上電后電子羅盤會默認(rèn)進(jìn)入正常工作模式,其內(nèi)部的MCU先完成一些外設(shè)資源的初始化、MEMS傳感器的初始化以及OLED屏的初始化,再讀取片內(nèi)F LASH,得到9個(gè)校準(zhǔn)參數(shù),即3軸加速度偏移值(Gxoff、Gyoff、Gzoff)、地磁傳感器3軸的標(biāo)定因數(shù)(Kx、Ky、Kz)、地磁傳感器三軸的偏移值(Mxoff、Myoff、Mzoff),然后MCU采集傳感器的原始數(shù)據(jù),將數(shù)據(jù)濾波后進(jìn)行姿態(tài)解算得到姿態(tài)角和航向角。當(dāng)按下按鍵,系統(tǒng)程序就會進(jìn)入校準(zhǔn)模式。羅盤先校準(zhǔn)加速度傳感器,通過加速度計(jì)持續(xù)采集一段時(shí)間的3軸加速度數(shù)據(jù),實(shí)時(shí)比較每次發(fā)送給MCU的數(shù)據(jù),得到加速度計(jì)XYZ軸的最大最小值,然后經(jīng)過計(jì)算得到每個(gè)軸的偏移值,接著校準(zhǔn)磁力計(jì)。磁力計(jì)先收集XY軸最大最小值,完成后將羅盤繞X軸旋轉(zhuǎn)90°,收集Z軸最大最小值,然后計(jì)算每個(gè)軸的偏移值,并在校準(zhǔn)完成后保存9個(gè)新的補(bǔ)償參數(shù)到片內(nèi)FLASH中,程序自動返回到正常工作模式。
系統(tǒng)軟件的流程如圖6所示。

圖6 軟件流程
3.4 MEMS傳感器電子羅盤樣機(jī)實(shí)驗(yàn)結(jié)果
電子羅盤的數(shù)據(jù)處理采用滑動窗口濾波算法,羅差補(bǔ)償校準(zhǔn)采用基于橢圓擬合法,即在0°~360°,每隔45°等間隔共8個(gè)試驗(yàn)點(diǎn)進(jìn)行誤差測試。程序運(yùn)行后,通過OLED顯示屏記錄電子羅盤在經(jīng)過誤差校準(zhǔn)補(bǔ)償之后的水平和30°傾角的傾斜狀態(tài)下的輸出點(diǎn)。測試實(shí)驗(yàn)的數(shù)據(jù)如表1所示。

表1 實(shí)驗(yàn)結(jié)果 單位:°
通過實(shí)驗(yàn)驗(yàn)證本文設(shè)計(jì)的羅盤在被軟件校準(zhǔn)補(bǔ)償后可達(dá)到±2°的精度和1°的分辨率,可以測量0°~360°范圍的航向角,驗(yàn)證了本文提出的基于橢圓擬合的校準(zhǔn)補(bǔ)償算法能夠很好地對傾角及羅差進(jìn)行補(bǔ)償。
4 結(jié) 論
通過對羅盤導(dǎo)航原理和誤差分析,實(shí)現(xiàn)了基于MEMS傳感器、可在三維空間中測量航向角、并具有校準(zhǔn)補(bǔ)償功能的電子羅盤。實(shí)驗(yàn)測試表明,所設(shè)計(jì)的電子羅盤能夠?qū)崿F(xiàn)姿態(tài)角的實(shí)時(shí)顯示,提出的基于橢圓擬合補(bǔ)償?shù)臉?biāo)定方法有效,被軟件校準(zhǔn)補(bǔ)償后可達(dá)到±2°的精度。該方法簡單快速,通過選擇高精度傳感器就可以改善羅盤的測量精度,對未來要求的小體積、低功耗及高精度電子羅盤設(shè)計(jì)具有參考價(jià)值。