光伏微電網反孤島下垂控制研究
2022-02-06 09:19:06陳懷忠孟夢錦徐日良
通信電源技術 2022年21期
陳懷忠,孟夢錦,徐日良
(浙江工業職業技術學院,浙江 紹興 312000)
0 引 言
光伏微電網以其清潔、低能耗的優點受到國際社會的廣泛關注。然而,由于光伏微電網的間歇性和不確定性,在從并網到孤島模式的過渡過程中,對微電網系統的安全可靠運行產生了很大的影響。由于光伏微電網發電對周邊環境的改變非常敏感,對光伏微電網控制的快速性和準確性提出了更高的要求。因此,有必要研究光伏微網從并網到孤島切換的功率等參數控制。在光伏微電網發電過程中,下垂控制技術常用于逆變器控制中。便于光伏微電網切換到孤島模式,并保持逆變器輸出電壓不變。光伏微電網下垂控制主要是實現系統中各參數的解耦控制,從而實現負載有功和無功功率的智能平均分配,使得光伏微電網輸出頻率和電壓保持穩定。但由于受到線路阻抗等因素的影響,在傳統的下垂控制下,光伏微電網在負載變化時,不同光伏電源的功率平均分配效果有待提高。微電網對負荷有功、無功功率的智能均分調節能力不足,導致孤島和并網運行方式切換時,功率分配不能達到智能均分,從而影響電網頻率波動。針對上述不足,研究一種基于虛擬阻抗的下垂控制策略。通過引入虛擬阻抗下垂控制策略,可以進一步增強系統的有功和無功功率共享效應[1,2]。
1 光伏微電網下垂控制模型
圖1是光伏電池等效模型。由電流源Is、二極管D、電阻Rs以及電阻Rsh構成。Is為電池短路電流。
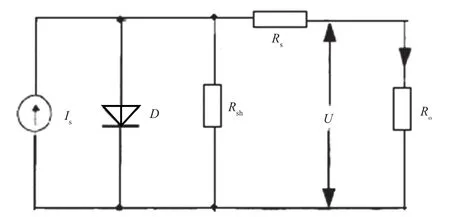
圖1 光伏電池等效模型
光電池的I-U特性為

式中:I為工作電流;Io為反向飽和電流;Is為光生電流;U為輸出電壓;Rsh為跨接電阻;Rs為由電極導體電阻等效的串聯電阻;A為PN結理想因數;T為絕對溫度;K為玻爾茲曼;q為電荷常數。
理想狀況下,Rs近似為0,Rsh近似無窮大,式(1)可表述為

光電池輸出功率為

式中:P為光電池的輸出功率。說明光電池的輸出功率與日照度呈非線性關系,與電壓和電流呈比例關系。
選擇2組容量相等的光伏,作為光伏微電網發電電源。光伏微電網發電的拓撲結構如圖2所示。
在圖2中,光伏微電網通過公共連接點(Point of Common Coupling,PCC)并入配電網。負載 1 和負載2分別作為局部荷載連接至微電源1和微電源2。光伏微電網逆變器一般采用有功和無功控制調節微電網相關參數。當光伏微電網孤島產生,光伏微電網與大電網脫離,光伏微電網的微電源所提供的功率由負荷決定。當光伏額定負載大于負載功率時,通常采用下垂控制策略,以減少光伏微電網并網運行向孤島運行模式切換帶來的參數波動影響。
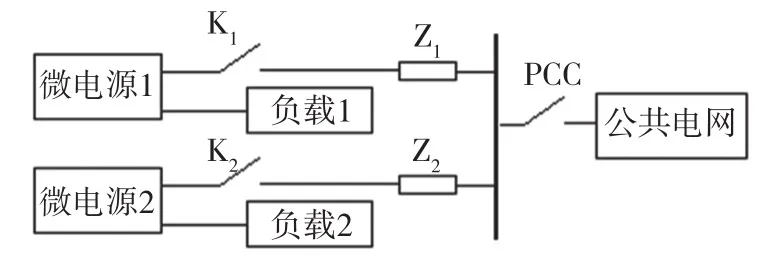
圖2 光伏微電網拓撲結構
2 下垂控制原理
主要模擬發電機相角和功率的運行特征,下垂控制的主要目標是使光伏微電網獲得平穩的頻率、電壓、功率等[3]。下垂控制的表達式為

式中:Uo為公共耦合點處電壓的有效值;Ui為第i個微電網電源的相電壓;θi為微功率輸出電壓與公共耦合點電壓之間的相位角差;Xi為第i個微電網到負載的傳輸線電抗;Pi和Qi分別是第i個微電網電源有功和無功輸出。式(4)、式(5)表明,相位角差θi決定了微功率有功功率Pi的傳輸,Pi與θi成正比,Pi從領先點傳輸到滯后點。微電網輸出電壓與公共耦合點電壓的幅值差決定了分布式微電網無功功率Qi的傳輸,Qi從高壓點傳輸到低壓點。通過控制微電網輸出的無功功率,達到控制其輸出電壓幅值的目的[4]。Un控制有功功率P的輸出,fn控制無功功率Q的輸出,可以表示為

式中:Un和fn分別為逆變器電壓輸出和頻率輸出值;Uref和fref分別為逆變器電壓輸出參考值和頻率輸出參考值;Qref和Pref分別為下垂曲線無功和有功基點值;Q和P分別為逆變器無功實際輸出值和有功實際輸出值;m和n為下垂控制系數。下垂控制曲線如圖3所示。
從圖3(a)Q-U下垂控制可以看出,光伏微電網電源的無功輸出與逆變器輸出電壓密切相關,改變逆變器電壓輸出值,可以調節光伏微電網電源無功功率。增加逆變器電壓輸出,系統無功功率降低;降低變頻器電壓輸出,系統無功功率升高。
從圖3(b)P-f下垂控制可以看出,光伏微電網電源的有功輸出與逆變器輸出頻率密切相關,改變逆變器頻率輸出值,可以調節光伏微電網電源有功功率。增加逆變器頻率輸出,系統有功功率降低;降低逆變器頻率輸出,系統有功功率升高[5]。

圖3 下垂控制曲線
3 改進的下垂控制策略
光伏微電網系統中,在常規下垂控制策略下,微電源線路阻抗等因素影響微電源功率分配效果,負荷有功、無功智能均分調節能力不足。
在微電源輸出線路中引入虛擬阻抗,使得光伏微電網線路總阻抗發生變化。引入虛擬阻抗之后,微電源電路阻抗呈感性,改變了逆變器電壓輸出值,可以調節光伏微電網電源無功功率。
引入虛擬阻抗后,使光伏微電源負載與微電網之間輸出呈感性阻抗,其特點如下。
(1)不影響系統的穩定性。(2)在光伏微電網電源的輸出端沒有接入1個“真正的”電感。由此引入“虛擬阻抗”的概念,這個阻抗在實際微電網電源中不存在,只是在光伏微電網電源負載與逆變器輸出端模擬引入1個虛擬阻抗,新的阻抗可以在電路中等效得到[6,7]。
引入虛阻抗后,整個光伏微電網的電源電路阻抗值自動優化。經過阻抗優化改進后,光伏微電網電源阻抗為感性特征,系統中的功率可以合理分配和優化[8,9]。
4 效果分析
下垂控制引入虛擬阻抗后,光伏微電網運行模型包括G1微電網和G2微電網。分別采用傳統下垂控制和基于引入虛擬阻抗改進控制策略進行模擬[10]。
光伏微電網的運行過程如下。首先,設置2臺逆變器在負載I下穩定運行,無功功率為40 kVA,負載II過一段時間投入運行。系統穩定運行后,無功功率為100 kVA。負荷II在運行一段時間后切除,系統無功功率重新降至40 kVA。
基于傳統的下垂控制,G1與G2之間的無功差值最大可達10 kVA。在傳統的控制策略下,當負荷變化增大或減小時,系統的輸出無功功率不能均勻分布,G1和G2的無功輸出值相差較大。
引入虛擬阻抗后,G1與G2之間無功差值最大小于1 kVA,無功功率的平均分配效果較好,系統可以實現功率的平均分配。
5 結 論
在孤島與并網模式切換過程中,光伏微電網采用傳統的下垂控制,會出現負荷有功、無功功率的智能調節和分配能力不足。這一不足將導致系統功率分配不優化。分析基于虛擬阻抗改進下垂控制方法的基本原理,設計了一種基于虛擬阻抗的改進下垂控制策略。該控制策略可以重構線路阻抗,實現自動功率均分控制。通過引入虛擬諧波阻抗控制,可以有效提高微電網的功率共享效果,改善電能質量。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26