基于GPS-RTK技術(shù)的配網(wǎng)新立砼桿空間位姿監(jiān)測方法
2022-02-02 08:48:26張福杰張國慶賴旬陽
湖北電力 2022年5期
關(guān)鍵詞:作業(yè)
裴 勉,張福杰,張國慶,梅 波,賴旬陽,徐 杰
(1.國網(wǎng)浙江省電力有限公司德清縣供電公司,浙江 德清 313200;2.三峽大學(xué) 電氣與新能源學(xué)院,湖北 宜昌 443000)
0 引言
近年來,帶電作業(yè)已成為電網(wǎng)設(shè)備檢測和檢修等的重要方法之一,其能避免電能損失與提高電力系統(tǒng)經(jīng)濟效益,保證電力系統(tǒng)可靠運行[1-7]。隨著用電負荷增長,電網(wǎng)容量也需要增加,從而需要頻繁開展帶電組立新砼桿作業(yè)來為新增用戶接入電源,同時對之前的老舊和設(shè)計不合理配電線路進行運維檢修時,也常采用組立新砼桿來解決線路老化造成的弧垂大等問題[8-11]。帶電組立新砼桿作業(yè)中,一般使用吊車和絕緣斗臂車來配合完成。裝配有橫擔(dān)的新立砼桿要被起吊并規(guī)避既有帶電導(dǎo)線,需要實時監(jiān)測和調(diào)整桿頭橫擔(dān)與導(dǎo)線的距離和角度。傳統(tǒng)通過人工監(jiān)測和旋轉(zhuǎn)砼桿的調(diào)整方式,需多次嘗試才能調(diào)整到位,既費力又不安全。
文獻[8]針對線路兩端過大高勢差導(dǎo)致的壓擔(dān)問題,經(jīng)帶電新立電桿消除了安全隱患。文獻[9]闡述了10 kV 帶電組立新電桿的具體作業(yè)流程和步驟,為開展帶電組立電桿作業(yè)提供參考依據(jù)和操作規(guī)范。文獻[10]通過優(yōu)化帶電立桿作業(yè)流程及各步驟用時,有效減少砼桿下落用時。文獻[11]對10 kV配網(wǎng)架空線路帶電立桿作業(yè)中,設(shè)計一種新工具來校正桿頭位置,不過仍然采用人工去判別橫擔(dān)與線路之間的角度。上述文獻對帶電立桿作業(yè)流程和步驟進行了梳理和優(yōu)化,但沒有從空間關(guān)系上對支撐橫擔(dān)、桿頭與帶電導(dǎo)線位置和距離、角度進行研究和應(yīng)用。
對于三維空間物體的定位和空間角度測量的方法有很多,如采用激光跟蹤儀、全站儀、激光雷達和計算機視覺三維定位等方法,對空間物體關(guān)鍵點進行實時動態(tài)定位[12-17]。各測量系統(tǒng)均有自身的獨特優(yōu)勢和不足,應(yīng)根據(jù)測量任務(wù)的需求選擇合適的方法。RTK(Real-time kinematic,實時動態(tài))技術(shù)是一種新的常用GPS測量方法,它采用載波相位動態(tài)實時差分方法,實時測量觀測點的三維坐標(biāo),且達到厘米級精度,被廣泛應(yīng)用到定位導(dǎo)航、工程測量等領(lǐng)域,在輸電線路工程領(lǐng)域也有所應(yīng)用,如采用GPS-RTK技術(shù)實現(xiàn)架空輸電導(dǎo)線的舞動、風(fēng)偏,電線塔桿傾斜程度等狀態(tài)的實時監(jiān)測[14,16-17]。相比上述所提的空間點定位方法,GPSRTK 技術(shù)具備測量效率高、操作方便、設(shè)備安裝靈活、不受空間環(huán)境影響,測點與測點以及測點與基站之間無需通視等特點。將GPS-RTK 技術(shù)引入帶電立桿作業(yè)中,解決空間運動目標(biāo)的實時動態(tài)監(jiān)測。
砼桿固定和導(dǎo)線安裝時,為控制橫擔(dān)與導(dǎo)線距離、角度在允許范圍內(nèi),本文提出一種基于GPS-RTK技術(shù)和空間角度實時計算與管理的砼桿調(diào)整裝置,在帶電組立砼桿作業(yè)中能夠快速準確地完成砼桿調(diào)整。
1 總體設(shè)計思路
帶電組立新砼桿作業(yè)過程中,如何確保支撐橫擔(dān)、桿頭與帶電導(dǎo)線具有安全的作業(yè)距離,及夯實桿根前確保支撐橫擔(dān)與帶電導(dǎo)線垂直,是作業(yè)的關(guān)鍵步驟。本文基于GPS-RTK 技術(shù)設(shè)計基于空間角度實時監(jiān)測的砼桿抱箍調(diào)整工具,使用該裝置能夠快速準確地完成支撐橫擔(dān)、桿頭與帶電導(dǎo)線的定位,以及實時監(jiān)測支撐橫擔(dān)、桿頭與帶電導(dǎo)線的空間距離,并建立支撐橫擔(dān)和帶電導(dǎo)線的空間模型,實時快速計算支撐橫擔(dān)與帶電導(dǎo)線的空間夾角,完成砼桿的快速調(diào)整。
現(xiàn)場作業(yè)中,使用吊車吊起裝配有橫擔(dān)的新立砼桿,在絕緣斗臂車的配合下,來完成帶電組立新砼桿。依據(jù)上述需要完成的兩個關(guān)鍵步驟,設(shè)計了基于空間角度實時監(jiān)測的砼桿抱箍調(diào)整工具:首先新立砼桿規(guī)避并穿越既有帶電導(dǎo)線,穿越時需要實時監(jiān)測和調(diào)整桿頭橫擔(dān)與導(dǎo)線的距離和穿越角度;然后在新立砼桿夯實固定和導(dǎo)線安裝時,需要使橫擔(dān)與導(dǎo)線角度接近垂直。
基于空間角度實時監(jiān)測的砼桿抱箍調(diào)整工具總設(shè)計如圖1所示,包括基于GPS-RTK高精度空間坐標(biāo)檢測模塊、近距離通信模塊和砼桿抱箍調(diào)整管理模塊。
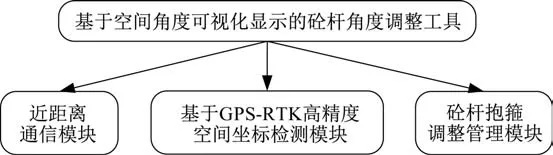
圖1 基于空間角度實時監(jiān)測的砼桿抱箍調(diào)整工具設(shè)計框圖Fig.1 Design block diagram of concrete rod hoop adjustment tool based on real-time monitoring of spatial angle
2 詳細設(shè)計方案
依據(jù)作業(yè)的流程及技術(shù)要求,設(shè)計基于空間角度實時監(jiān)測的砼桿抱箍調(diào)整工具。工具的3個模塊即基于GPS-RTK高精度空間坐標(biāo)檢測模塊、近距離通信模塊和砼桿抱箍調(diào)整管理模塊的詳細功能和方案設(shè)計及相互關(guān)系如圖2所示。
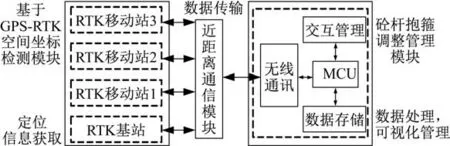
圖2 3個模塊之間的相互關(guān)系Fig.2 Diagram of the relationship between the three modules
基于GPS-RTK高精度空間坐標(biāo)檢測模塊主要由4個RTK 標(biāo)簽位構(gòu)成:包括1 個固定基站標(biāo)簽位和3 個移動站標(biāo)簽位;這些標(biāo)簽位根據(jù)現(xiàn)場作業(yè)需求,安放在合適的位置,用于實時獲取所在點的空間位置坐標(biāo)信息。4個獨立設(shè)置的RTK標(biāo)簽位通過近距離通信模塊進行信息共享和交互。近距離通信模塊通過無線網(wǎng)絡(luò)將數(shù)據(jù)傳輸至砼桿抱箍調(diào)整管理模塊的智能芯片MCU,MCU 再對獲得的數(shù)據(jù)進行實時處理,計算出支撐橫擔(dān)、桿頭與帶電導(dǎo)線的空間位置和所夾的角度;然后通過人機交互,對帶電組立新砼桿作業(yè)的關(guān)鍵步驟進行實時管理:實時監(jiān)測和調(diào)整新立砼桿桿頭橫擔(dān)與導(dǎo)線的距離和穿越角度,確保砼桿安全穿越既有帶電導(dǎo)線;通過交互快速調(diào)整橫擔(dān)與導(dǎo)線角度接近垂直等。
2.1 空間位置定位技術(shù)
支撐橫擔(dān)、桿頭與帶電導(dǎo)線的空間位置主要基于GPS-RTK(Real-time kinematic,實時動態(tài))技術(shù),由空間坐標(biāo)檢測模塊來實現(xiàn)。RTK實時動態(tài)技術(shù)通過把基站的載波相位發(fā)給用戶移動站,求差獲得空間坐標(biāo)。相位觀測到4 顆及其以上數(shù)量衛(wèi)星值,以及通過建立合適的空間模型,GPS-RTK用戶移動站實時定位精度可達厘米級,其定位原理如圖3所示。
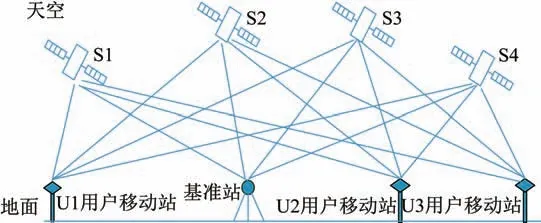
圖3 GPS-RTK定位原理Fig.3 GPS-RTK positioning principle
2.2 導(dǎo)線和橫擔(dān)空間模型的建立
空間坐標(biāo)檢測模塊中設(shè)置4 個RTK 標(biāo)簽位:RTK基站標(biāo)簽位固定于導(dǎo)線正下方;3 個RTK 移動站標(biāo)簽位其中的1 個也需放置在導(dǎo)線正下方,但與基站標(biāo)簽位相隔一定距離,并且其與導(dǎo)線的垂直高度應(yīng)和基站標(biāo)簽位距離導(dǎo)線的垂直高度保持一致;其它2 個RTK移動站標(biāo)簽位放置在與橫擔(dān)平行的抱箍操作桿兩端,用于確定橫擔(dān)方向。從而在空間直角坐標(biāo)系中,構(gòu)建空間模型如圖4所示。
圖4中RTK基站標(biāo)簽位所在空間點G與一個移動站標(biāo)簽所在空間點U1距離導(dǎo)線的垂直距離均為h,且均位于導(dǎo)線正下方,從而使基站標(biāo)簽位與移動站標(biāo)簽位所確定的直線GU1與導(dǎo)線所在的空間方向一致,從而確定了導(dǎo)線空間方向,在帶電組立新砼桿過程中G、U1的坐標(biāo)固定不變。
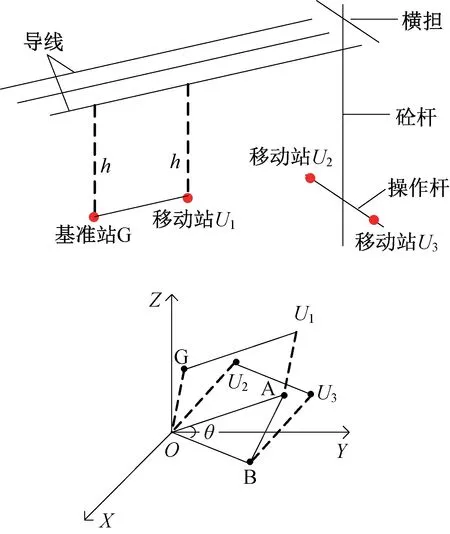
圖4 導(dǎo)線和橫擔(dān)所在空間直角坐標(biāo)系Fig.4 Rectangular coordinate system of the space where the wire and the cross-arm are located
兩個RTK 移動站標(biāo)簽位位于砼桿調(diào)整裝置中與橫擔(dān)平行的操作桿兩端,所構(gòu)成的直線U2U3與橫擔(dān)平行,從而確定橫擔(dān)的空間方向。在帶電組立新砼桿過程中,U2、U3的坐標(biāo)隨砼桿的移動而不斷變化。
通過GPS-RTK高精度空間坐標(biāo)檢測模塊,得到各空間點在坐標(biāo)系O-XYZ中的坐標(biāo)為:G(xG,yG,zG);U1(x1,y1,z1);U2(x2,y2,z2);U3(x3,y3,z3)。
在O-XYZ坐標(biāo)系中,直線GU1為導(dǎo)線所在的空間方向,將GU1平移使點G與O重合,得到OA,即直線OA也為導(dǎo)線的空間方向。A點的坐標(biāo)為(x1-xG,y1-yG,z1-zG),可得:

直線U2U3為橫擔(dān)所在的空間方向,將直線U2U3平移得到OB,即直線OB也為橫擔(dān)的空間方向。B點坐標(biāo)為(x3-x2,y3-y2,z3-z2),可得:

根據(jù)A、B兩點的坐標(biāo),則有:

直線GU1和直線U2U3所形成的空間角度為橫擔(dān)與導(dǎo)線的空間夾角,∠AOB的大小即為導(dǎo)線與橫擔(dān)的空間夾角,將式(1)、式(2)、式(3)代入,依據(jù)下面公式即可求得導(dǎo)線與橫擔(dān)的空間夾角θ:

3 基于新裝置的作業(yè)流程及交互管理
基于前述理論研究設(shè)計作業(yè)工具1 套,如圖5所示。
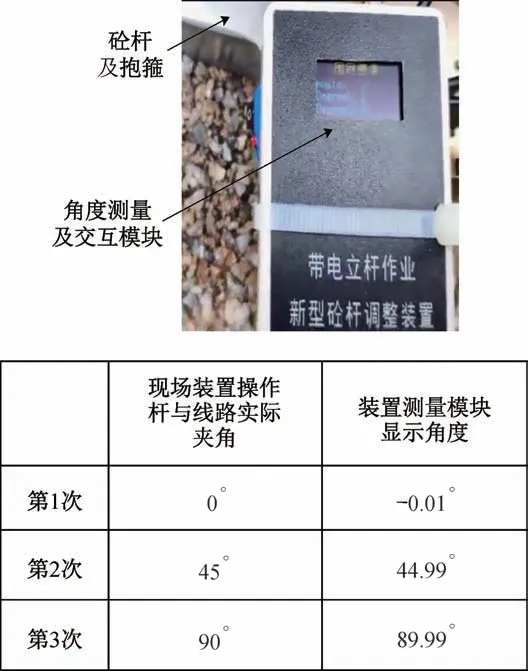
圖5 基于GPS-RTK技術(shù)的帶電立桿作業(yè)新型砼桿調(diào)整裝置及測試試驗Fig.5 A new concrete pole adjusting device for live pole erection and test based on GPS-RTK technology
依據(jù)作業(yè)現(xiàn)場狀況和技術(shù)要求,基于空間角度實時監(jiān)測的砼桿抱箍調(diào)整工具,GPS-RTK固定基站和移動站將數(shù)據(jù)通過無線網(wǎng)絡(luò)傳輸至砼桿抱箍調(diào)整管理模塊,計算橫擔(dān)與導(dǎo)線方向夾角,并在交互管理中顯示各點坐標(biāo)和夾角大小。當(dāng)操作人員調(diào)整砼桿至一定角度后,砼桿抱箍調(diào)整管理模塊中交互管理設(shè)備顯示基于GPS-RTK及空間建模所檢測到的實時角度;然后依據(jù)該檢測角度的大小,分別指示操作人員實施相應(yīng)的操作處理。帶電組立新砼桿作業(yè)詳細流程分解如下:
1)在地面安裝好支撐橫擔(dān)等,并進行絕緣遮蔽。
2)將抱箍等砼桿調(diào)整裝置固定在砼桿適當(dāng)高度位置,并使操作桿與支撐橫擔(dān)平行;將兩個RTK 移動基站放置在操作桿的兩端確定位置。
3)將GPS-RTK 固定基站和一個移動站沿既有導(dǎo)線方向,且與導(dǎo)線垂直距離相等(海拔高度相同)的位置進行放置。
4)通過起吊設(shè)備將砼桿越過帶電導(dǎo)線,對準下方桿洞。
5)操作人員在交互管理提示下通過抱箍操作桿來旋轉(zhuǎn)砼桿:當(dāng)夾角小于45°時,交互管理中報警燈閃爍亮起;當(dāng)夾角介于45°~75°之間時,交互管理中紅色指示燈亮起,可用力旋轉(zhuǎn)砼桿;當(dāng)夾角介于75°~85°之間時,交互管理中黃色指示燈亮起,可緩慢旋轉(zhuǎn)砼桿;當(dāng)夾角介于85°~90°之間時,交互管理中綠色指示燈亮起,緩慢旋轉(zhuǎn)砼桿的同時留意角度值,當(dāng)角度顯示到90°±1°時可停止旋轉(zhuǎn)砼桿,調(diào)整到位。
6)夯實砼桿根部,將導(dǎo)線固定后,砼桿調(diào)整裝置拆卸回收。
4 結(jié)語
本文提出的基于空間角度電子監(jiān)測的砼桿抱箍調(diào)整工具,采用GPS-RTK技術(shù)實時精確地檢測橫擔(dān)與導(dǎo)線的夾角,并通過交互管理砼桿的調(diào)整角度,能有效解決帶電組立新砼桿通過人工方式費時費力以及不安全等問題。與傳統(tǒng)的作業(yè)方法相比,采用該裝置輔助作業(yè)具有精確性高、安全性高、以及人機交互強等優(yōu)點。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
