投棄式海流剖面測量儀旋轉測試系統研制
2022-02-01 04:18:02劉云梁陳光源杜立彬劉云龍
海洋技術學報 2022年6期
劉云梁,陳光源,杜立彬,劉云龍
(1.山東科技大學海洋科學與工程學院,山東 青島 266590;2.國家海洋局北海環境監測中心,山東 青島 266033)
投棄式海流流速剖面測量儀(Expendable Current Profiler,XCP)[1-4]是一次性使用的海流剖面觀測儀器,利用其探頭在海水中自由下落的過程,快速獲取海水垂直剖面海流速度,已被廣泛用于海洋科學調查、魚情環境調查,以及海軍艦船的機動海洋動力環境觀測中。美國華盛頓大學應用物理實驗室SANFORD T B等[5-6]于1971年提出了海水運動感生電磁場的基本計算公式,并于1978年成功研發出了第一臺投棄式溫度速度測量儀(Expendable Temperature and Velocity Profiler,XTVP)。目前,XCP相關技術被日美兩國壟斷,對非盟友國家開展技術封鎖,我國無法獲得相關產品及技術。我國海洋投棄式設備的研究最初主要集中在海洋溫度、鹽度、深度測量方面。對于投棄式海流測量研究的大規模支持開始于2006年,山東省科學院海洋儀器儀表研究所、國家海洋技術中心、中國地質大學(北京)、河北工業大學和山東科技大學等均開展了測量原理、結構外形、流速傳感器的相關研究,形成原理樣機,獲得了初步的探測成果[7-13]。
XCP研制的難點之一在于其測量基于天然地磁場[14-16],且測量間距極小,從而導致海流感生信號水平極其微弱。為了獲取極低的電磁場感生信號,需要通過XCP探頭在海水中的高速自旋轉運動從而實現對微弱信號的調制和提取。自旋轉速度與采集電路的匹配、對噪聲的濾除水平是有效獲取海流信號的關鍵因素之一。為了測試上述XCP探頭自旋運動對海水中微弱信號的提取水平,本文開展海洋測量探頭水中高速旋轉模擬測試系統的研制,在室內水槽中模擬XCP探頭在海水中水平方向的高速自旋轉運動。針對室內水槽模擬測試面臨的實際問題,重點解決環境磁場干擾,大規模海流模擬,水中穩定高速轉動等問題。采用無磁旋轉結構設計減小電磁干擾,對稱輕巧的設備安裝方法設計減小高速旋轉下的形變及軸向偏移,模塊化的采集電路及采集預處理軟件設計,使研制的測試系統能夠通過模塊的替換應用于其他測試設備,豐富海洋設備實驗室測試手段。
1 XCP測量原理
XCP基于電磁感生原理,測量探頭在海水中自由下落的過程中,采集海流切割地磁場產生的感生電信號,并通過探頭本身的10~20 Hz的高速自旋運動,實現信號的調制,再將調理信號通過無線方式傳送至接收平臺,實現固定或走航情況下的快速流速垂直剖面測量,工作示意圖如圖1所示。圖1中XCP測量探頭存在如藍色箭頭所示兩個方向的運動:垂直下落和軸向自旋。
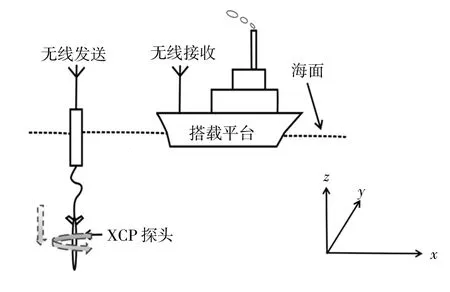
圖1 XCP測量工作示意圖
建立如圖1所示坐標系,x軸指向東,y軸指向北,z軸豎直向上。當海流以速度V沿任意方向水平流動時,切割地磁場磁感線,產生感生電壓。當感生電壓的測量方向與y軸存在一個夾角(測量方位角θ)時,水平放置的距離為L的兩個海流傳感器之間探測到的海流感生電動勢如下。

式中,VE、VN分別為海流速度的東向分量和北向分量;Fz為地磁場的垂直分量。
投棄式海流剖面測量以天然地磁場作為場源,感生電場規模及電壓大小與海流尺度及速度相關。由于天然地磁場幅值水平較低,在海面上約為幾個納特,且隨著海水的深度增加,電磁波被海水層大幅衰減,進而導致感生電場水平也逐漸變小。根據公式(1)可推算得知,中低緯度地區,速度為1.5 cm/s的海流,產生感生電場量值約為幾個uV/m。XCP中的海流傳感器布設在測量探頭同一高度橫截面的兩端,測量間距為幾十厘米。針對1.5 cm/s的測量精度,XCP需能夠采集低至nV水平的感生電場信號(約為50 nV/Hz-1)。圖1中所示探頭水平方向的旋轉運動是實現nV信號測量的重要方法之一,也是本文模擬系統研制的主要目標。
2 旋轉測試系統設計
2.1 總體架構
基于地磁場的海流探測設備的工作方式與其他原理的流速測量的顯著區別在于需要在探頭下落過程中伴隨自身的高速旋轉(即如圖1藍色箭頭所示的兩個方向的運動)。為了模擬XCP測量探頭在海水中高速自旋轉的測量環境,本文設計了一種可用于室內流速水槽的低噪聲旋轉測試系統,用于分析驗證所研制的XCP測量探頭的自旋運動對信號采集的有效性。
本文設計的測試系統包括高速自旋結構、實時采集硬件電路模塊、預處理存儲軟件模塊3個主要部分。高速自旋結構是本文設計的主體結構,通過無磁旋轉結構設計,重點解決動力系統噪聲屏蔽、高速自旋、水中旋轉姿態穩定等問題。實時采集硬件電路模塊通過多級放大濾波,實現采集信號的實時采集和預處理。預處理存儲軟件模塊用于采集數據的預處理和存儲,實現測試系統數據的直觀顯示。自旋模塊是完成硬件采集和軟件顯示的前提,硬件采集和軟件顯示是自旋模塊的最終表現和反饋手段。通過三者相互配合,實現探頭水中高速自旋轉情況下的海流電磁感生信號采集測試。根據XCP探頭測試需求,該裝置主要實現功能包括:轉動速度為13 Hz、14 Hz、15 Hz、16 Hz、17 Hz、18 Hz共6檔可調;屏蔽50 Hz為主的工頻干擾;實現nV水平海流感生電場信號的實時采集等。
在室內水槽實驗中,旋轉測試系統受到海水多方向力的影響,實際的自旋轉速度是否能夠達到預設、與濾波電路中心頻率的匹配程度、自旋過程中是否出現軸向偏轉誤差等是在系統設計及實際實驗中重點要解決的問題。
2.2 高速自旋結構設計
對比空氣中的旋轉結構,在水中的高速旋轉模擬結構設計中,除了滿足上述實驗目的和需求外,還需考慮外部動力結構對測量環境的電磁噪聲影響,水中實際旋轉過程中對探頭周圍流場的擾動,以及測試水槽的邊壁效應等問題。
為此,本文設計專門用于海水中高速自旋轉測試結構,結構設計如圖2所示。該自旋測試結構主要包括:①動力結構:用于帶動測試結構主體旋轉,模擬XCP探頭在海水中的自旋轉;②旋轉結構:用于固定測試探頭及流速傳感器,減小高速旋轉中出現的軸向偏移,并在旋轉測試過程中減小對傳感器周圍流場的干擾;③固定支撐結構:安裝在實驗流速水槽頂部,用于將動力結構和旋轉結構固定,并保證流速傳感器置于流速水槽中深度可調。
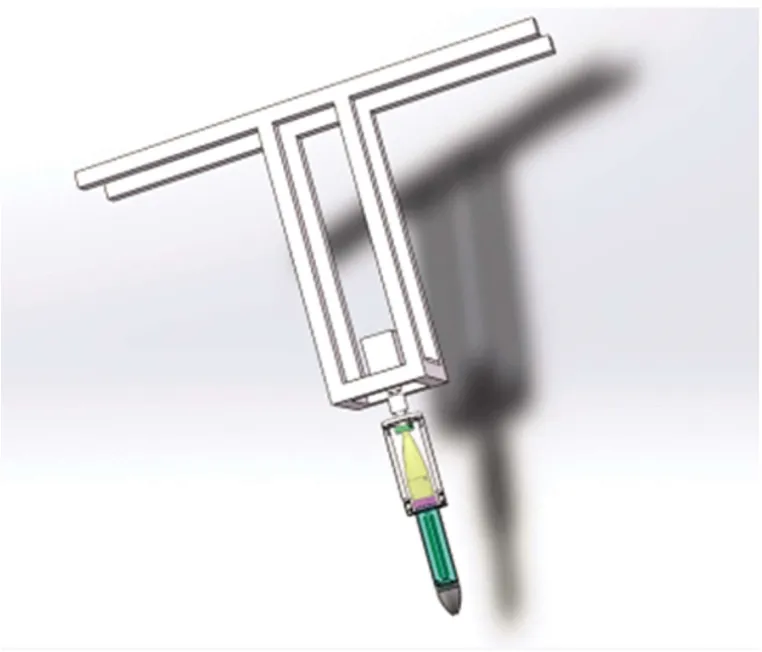
圖2 旋轉結構設計圖
2.2.1 主體旋轉結構設計
測試系統的主體結構為帶動測量探頭旋轉的圓筒形結構,用于固定探頭,起連接動力結構的作用。為了減小旋轉過程中海水的阻力及因旋轉產生的流場擾動,主體旋轉結構為空心圓柱形設計,圓柱內徑10 cm,整體結構重量約2 kg。將整個旋轉結構及測試探頭的質點選在半徑1/2位置的圓柱面上,根據轉速與離心力關系(式(2)),可求得平均離心力大小約為274 N。其中,RCF為相對離心力,單位g;N為轉速,單位r/min;R為離心半徑,單位cm。

同時,為了避免金屬材料對探頭主體產生電磁干擾,整體采用ABS(Acrylonitrile Butadiene Styrene plastic)進行代替材料制作。實際測試時,將探頭的首端固定在旋轉結構支撐筒頂部,探頭主體置于支撐筒內。探頭中部通過輔助結構與旋轉圓筒固定,通過調節輔助固定結構調整探頭固定的松緊程度。探頭尾部置有流速傳感器,整體暴露在待測海水中。
2.2.2 動力結構參數選擇
選用小型直流電機及減速機作為旋轉測試裝置的動力結構,用來帶動測試探頭在室內水池中以不低于1 000 r/min的速度旋轉。為了減少電磁干擾影響,旋轉結構采用非金屬材料,為保證這兩部分的良好連接并避免轉動偏角,選擇剛性聯軸器作為動力傳輸部件,能夠較好地補償由于高速運轉而產生的相對位移。
用于室內水槽實驗的XCP測量探頭僅包含信號采集艙體(包括傳感器和電路板),未安裝探頭配重及千米級數據傳輸導線,故總重量不超過3 kg。由于旋轉裝置為圓筒形結構,海水對圓筒整體的力之和為0。根據受力、力臂與力矩、功率的關系,可確定直流電機參數。

式中,F為受力,單位N;D為力臂,單位m;T為扭矩,單位N·m;P為輸出功率,單位kW;N為轉速,單位r/min。
合適的電機軸套桿長度能夠進一步保證主體旋轉結構的穩定、無偏轉動,根據式(4)可計算所需電機軸的套桿長度。

式中,P為直流電機的額定功率;K為鍵槽系數;A為指定系數;η表示從電機到輸出軸之間的傳動效率的乘積;Nj為輸出軸的計算轉速。
2.3 信號采集模塊設計
為了使本文所研制的海洋旋轉模擬測試系統能夠應用于不同設備的測試,設計專門的信號采集模塊對傳感器信號進行實時采集和預處理。信號采集模塊置于實驗水槽外部,通過導電滑環與旋轉測試結構上的傳感器進行連接,從而避免高速自旋轉導致數據線纏繞。
由XCP測量原理可知,海流切割地磁場產生的感生海流信號較小,測量間距小于1 m的情況下,厘米級海流產生感生電場信號為納伏級水平。為了有效獲取海流感生信號,對原始信號采取兩級放大設計,并根據測試裝置旋轉頻率,進行鎖相放大,提高采集精度。信號采集處理流程如圖3所示。

圖3 信號采集模塊原理圖
原始的海流感生信號在探頭的高速自旋轉運動下被調制為交流信號,并頻移超低噪聲頻段。以有效信號頻率為中心頻率,對采集信號進行帶通濾波,初步濾除噪聲干擾。通過電路產生參考信號,對目標頻率的有效信號進行鎖相放大,放大倍數250倍。然后對信號進行次級濾波,并進一步放大2 500倍。從而實現nV海流信號采集。
2.4 軟件數據預處理模塊
海流傳感器測得海流感生電場信號通過數據線經導電滑環傳送至水面的數據采集模塊進行濾波放大,然后通過串口或USB方式傳送至上位機進行處理、顯示、存儲。本文基于Matlab軟件編寫數據預處理程序,實現測量數據的實時顯示、分析及存儲。采集程序編寫流程如圖4。測試系統硬件組裝完成后,硬件系統通電,旋轉結構帶動探頭在水中開始高速旋轉。上位機采集控制軟件發送檢測指令,檢測電路連接是否正常,若檢測不通過,則結束采集流程,關閉硬件電源,進行電路檢測,排查是否出現接線端密封不嚴等問題,避免電路燒毀。若檢測通過,則繼續發送數據采集指令,上位機開始接收、存儲并顯示傳感器采集到的電信號。采集完成后,可通過采集軟件選擇是否對電信號進行預處理,若不需要進行預處理,則結束采集流程。若選擇進行預處理,則調用外部數據處理程序,實現電信號轉為測試物理量的預處理。

圖4 預處理存儲軟件流程圖
針對不同的測試對象,此處可調用不同的數據處理程序段。對于本文的海流測試,則調用預先編寫好的電信號轉換為海流數據的程序。經預處理后的數據,可通過上位機軟件進行曲線的顯示,預處理后數據的存儲等功能。
3 旋轉結構對流場影響水槽試驗
為了測試本旋轉系統的有效性,本文于2021年8月在國家海洋局北海環境監測中心開展水動力大尺度流速環境下,開展XCP探頭旋轉模擬測試試驗。該中心的渤海生態預警與保護修復重點實驗室建有大型水動力波浪流模擬水槽,占地面積約125 m2,水槽長32.0 m,內寬0.8 m,內深2 m,最大工作水深1.5 m,工作介質可使用海水。1.5 m工作水深時可產生0.1 m/s內可調的勻速、平穩流場,能夠滿足本實驗需求。在本實驗中,采用Nortek Vectrino Profiler聲學多普勒定點流速儀作為比測設備,用于測量旋轉結構運行時對周圍水流速度的影響,以及在旋轉結構輔助下XCP的流速測量效果分析。為了便于對比分析,本文直接采用經硬件采集模塊及軟件處理模塊處理的流速數據,討論對處理后的流速數據的影響。實驗設備具體布設情況如圖5所示。

圖5 旋轉結構水槽實驗圖
3.1 旋轉測試系統轉速特性試驗
實際XCP在海試過程中的旋轉采集頻率為10~20 Hz,據此,在實驗過程中對不同的電機轉速進行了測試。通過電機控制器改變直流電機速度,然后軟件模塊記錄實際XCP旋轉頻率,測試結果如表1所示。轉速特性較好,相對誤差隨轉速增大而減小,最大誤差出現在15 Hz,轉速平均誤差為0.27%。
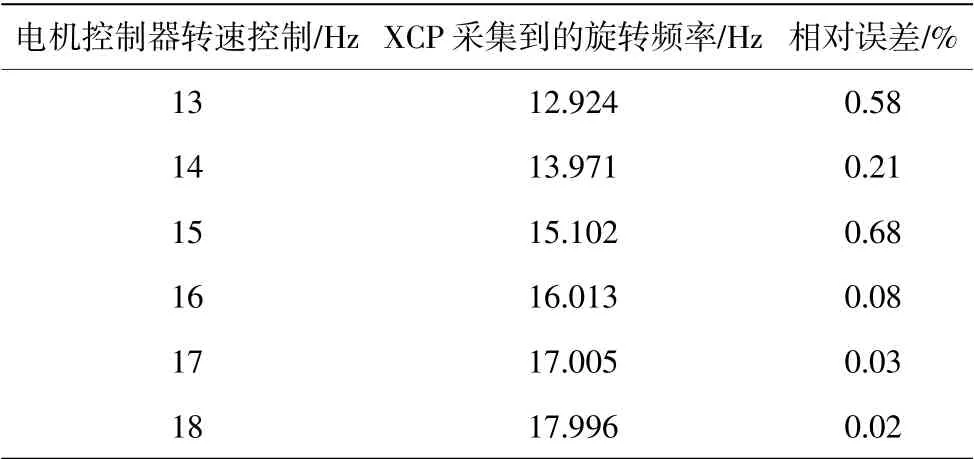
表1 旋轉測試系統轉速特性
3.2 旋轉測試系統輔助XCP流速測量試驗
為了研究旋轉結構在海水中運動時,對測點附近流場的影響情況,首先設計海流速度為0 cm/s情況下的流速比測實驗。將ADV與旋轉測試系統在水槽中等高度,間隔1 m布設(圖5)。在水中旋轉結構16 r/s運行及停止情況下,采集聲學流速儀記錄的水流平均變化(水溫22.07℃,采樣率20 Hz,采樣點2 535個),并計算流速標準偏差,如表2所示。由測試結果可知,水中旋轉測試系統的運行對海水垂直方向速度(Vz)影響明顯,最大標準偏差約為0.022 cm/s。對水平方向流速(Vx、Vy)影響較小,最大相對誤差約為0.01 cm/s。針對XCP水平方向1.5 cm/s的測量精度要求,該旋轉測試系統對水平方向流速影響不超過XCP流速測量精度要求的1.4%,可以滿足XCP室內測試需求。

表2 旋轉結構對流速影響數據分析
為了進一步研究利用旋轉測試系統開展XCP流速測量的有效性,在流速水槽不同造流檔位下(以造流發電機工作電流強度分檔:8 A、9 A、10 A、11 A、13 A),開展ADV與旋轉測試系統輔助下的XCP流速測量對比測試。由于造流水槽的造流精度有限,且兩種測試設備對海流采集的基本原理不同,精度及誤差來源也有所區別,因此重點對兩種設備采集流速參數進行趨勢比較,開展定性分析。如圖6所示,ADV與旋轉測試系統輔助下的XCP采集的流速數據曲線整體變化趨勢一致,聲學法測得流速值整體略高于電磁法,可能是由于水槽金屬鋼筋骨架及造流發電機對地磁場產生輕微干擾導致。最大流速誤差出現在造流電機9檔速度位置,速度偏差0.052 1 cm/s。對于1.5 cm/s的XCP測量精度,該偏差約為總精度的3.5%,可滿足室內XCP測試需求。
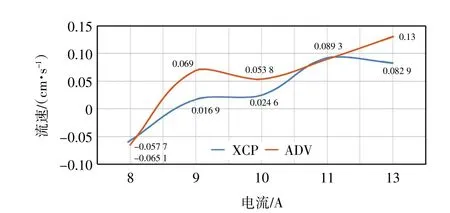
圖6 ADV與XCP(組合旋轉測試系統)旋轉流速對比
4 結 論
根據海洋電磁流速剖面測量技術的實際測試需求,本文設計出一種可用于室內流速水槽的低噪聲旋轉測試裝置,配合上位機數據采集處理程序實現旋轉探頭感生信號采集實驗。通過室內流速水槽試驗證明,該測試系統能夠有效模擬XCP探頭海水中的高速自旋轉過程,整體結構對水流流場分布影響及電磁干擾程度較小,并可應用于其他同類型測量設備的模擬測試中,得出主要研究結論如下。
(1)本文設計的水中旋轉測試系統充分考慮了海洋環境測試的需求和特點,其機械結構部分以低磁場干擾及小軸向偏轉研究為核心,通過旋轉測試結構離心力分析,材料、部件、結構外形設計,減少磁性材料和活性連接結構使用,保證在高速旋轉情況下,探頭對海流電場信號的有效測量。
(2)在軟件設計部分,采用模塊化數據采集預處理設計,可根據實際測試對象需要對采集除了軟件進行替換修改。通過與水中旋轉機械結構的對接,實現多種海水采集設備的旋轉測試,使該測試系統具有更廣泛的適用性。
(3)該旋轉測試系統已在北海監測中心的流速水池中完成了為期一個月的實際測試,測試介質為海水。測試結果表明,該測試結構機械轉動部分相對于探頭自旋轉的情況,其對于靜態水流測試的影響在水平方向上不超過0.022 cm/s,該誤差不超過XCP流速測量精度要求的1.4%,可以滿足XCP室內測試的需求。
在后續的研究中,需進一步改進結構設計,增加橫向拖曳功能,模擬探頭軸向運動及旋轉同時存在情況下,探頭數據采集情況,使室內水槽測試更加接近真實海洋探測情況。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
