高速?zèng)_壓設(shè)備機(jī)械手抓手自動(dòng)識(shí)別系統(tǒng)開(kāi)發(fā)與實(shí)現(xiàn)
2022-02-01 03:26:32范勇陽(yáng)帆莊王鑫曾昭偉
鍛壓裝備與制造技術(shù) 2022年6期
范勇,陽(yáng)帆莊,王鑫,曾昭偉
(上汽大眾汽車(chē)有限公司 長(zhǎng)沙分公司,湖南 長(zhǎng)沙 410132)
1 引言
隨著科技的迅猛發(fā)展,汽車(chē)產(chǎn)業(yè)正經(jīng)歷著前所未有的變革,特別是新能源產(chǎn)業(yè)的興起,快速引發(fā)了競(jìng)爭(zhēng)格局的變化與產(chǎn)業(yè)生態(tài)的全面重構(gòu)。僅2018 年國(guó)內(nèi)有超過(guò)300 家企業(yè)直接投身于汽車(chē)的研發(fā)與制造,2021 年全國(guó)機(jī)動(dòng)車(chē)保有量已達(dá)3.95 億輛。
生活方式的轉(zhuǎn)變,帶來(lái)了需求的多元化。市場(chǎng)需求的改變又勢(shì)必引起汽車(chē)生產(chǎn)企業(yè)加大車(chē)型投放,在多種類(lèi)車(chē)型生產(chǎn)中能夠小批量快速切換。這無(wú)疑給汽車(chē)制造企業(yè)帶來(lái)了很大挑戰(zhàn)。生產(chǎn)成本的增加與生產(chǎn)效率的降低問(wèn)題更加凸顯,不斷提高設(shè)備的智能化水平,提升生產(chǎn)效率,正變得愈加迫切。這也正是本文所要研究和解決的問(wèn)題。
2 問(wèn)題描述
當(dāng)前,一條沖壓產(chǎn)線往往需要匹配多種車(chē)型的幾十種零件快速切換生產(chǎn)。不同零件生產(chǎn)時(shí),機(jī)械手需要匹配不同的機(jī)械手Tooling 抓手用于多工序間的物料傳輸,這些抓手往往集中存儲(chǔ)于立體高架庫(kù)位中,如圖1 所示。生產(chǎn)線沖壓零件切換前,工人需要從高架庫(kù)位中的眾多機(jī)械手Tooling 抓手中將待上線的抓手取出并安裝到對(duì)應(yīng)產(chǎn)線的對(duì)應(yīng)工位自動(dòng)更換抓手小車(chē)上。

圖1 機(jī)械手抓手存放立體倉(cāng)庫(kù)
由于抓手結(jié)構(gòu)非常相似,人工幾乎無(wú)法一一目視分辨,每次切換零件后只能依靠色標(biāo)進(jìn)行輔助檢查,而設(shè)備又缺少自動(dòng)感知和識(shí)別系統(tǒng),如果出現(xiàn)人為失誤,任意機(jī)械手更換抓手時(shí)未能拾取到對(duì)應(yīng)的零件、對(duì)應(yīng)工位的抓手,必然導(dǎo)致抓手與模具結(jié)構(gòu)不匹配,整線一鍵啟動(dòng)后則會(huì)發(fā)生設(shè)備碰撞,造成嚴(yán)重后果。其大致操作流程如圖2 所示。
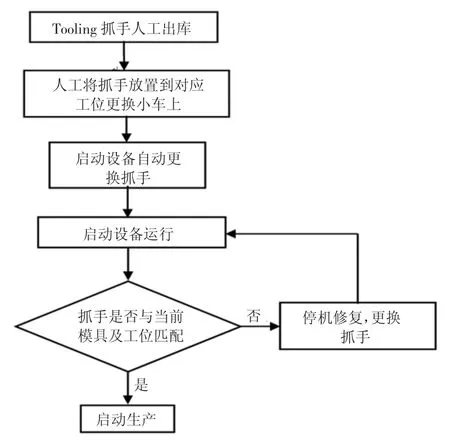
圖2 機(jī)械手抓手準(zhǔn)備流程
3 方案設(shè)計(jì)
針對(duì)機(jī)械手抓手人工出庫(kù)安裝易出錯(cuò)的問(wèn)題,結(jié)合當(dāng)前現(xiàn)場(chǎng)情況及設(shè)備結(jié)構(gòu)增加一套機(jī)械手Tooling 抓手自動(dòng)識(shí)別系統(tǒng),并集成于生產(chǎn)設(shè)備現(xiàn)有的控制系統(tǒng)中,更加安全,高效。
首先,將當(dāng)前在庫(kù)所有抓手按照其所屬零件號(hào)、所屬產(chǎn)線及所屬工位號(hào)進(jìn)行編碼,并在每個(gè)抓手上張貼含有上述信息的自制二維碼標(biāo)簽;
其次,通過(guò)安裝在每一個(gè)抓手更換小車(chē)上的二維碼識(shí)別器讀取當(dāng)前抓手的二維碼標(biāo)簽信息,并通過(guò)無(wú)線信號(hào)發(fā)射將信息上傳至中央控制器;
二維碼識(shí)別器(圖3)采用的是得利捷Datalogic 210N 超緊湊工業(yè)二維碼閱讀器,其擁有豐富的網(wǎng)絡(luò)接口,集成以太網(wǎng)和PROFINET,EtherNet/IP 接口;不僅采用WVGA 圖像傳感器,每秒可捕捉畫(huà)面高達(dá)60幀,并且內(nèi)置靈活且功能強(qiáng)大的照明器,實(shí)現(xiàn)了優(yōu)異的DPM碼(直接部件標(biāo)識(shí))閱讀能力;超快的圖像采集,滿足現(xiàn)場(chǎng)高速生產(chǎn)線的應(yīng)用需求。

圖3 二維碼識(shí)別器
最后,中央控制器在收到信號(hào)后會(huì)與已激活的信息庫(kù)數(shù)據(jù)進(jìn)行對(duì)比,并在本地HMI 顯示界面進(jìn)行識(shí)別信息顯示,同時(shí)將對(duì)比結(jié)果傳遞給生產(chǎn)設(shè)備主系統(tǒng),用于設(shè)備啟動(dòng)使能條件之一。
機(jī)械手Tooling 抓手識(shí)別系統(tǒng)上位機(jī)與生產(chǎn)設(shè)備主控間進(jìn)行物理隔離,從而保持壓機(jī)主控設(shè)備原有的安全性。識(shí)別系統(tǒng)方案整體構(gòu)成如圖4 所示。
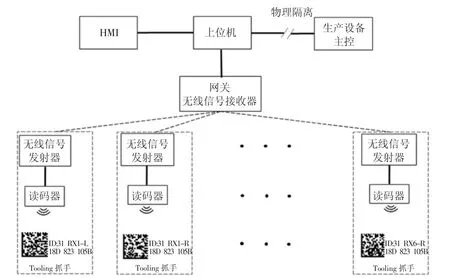
圖4 機(jī)械手Tooling 抓手識(shí)別系統(tǒng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
3.1 信息編碼
每個(gè)抓手的特定位置上安裝含有身份信息的二維碼標(biāo)簽。如圖5 所示,二維碼包含信息有:該抓手屬于ID31 號(hào)零件(18D 827 159G),位于0# 更換小車(chē)的右側(cè),則相應(yīng)的標(biāo)簽識(shí)別碼是CBF0_R 。
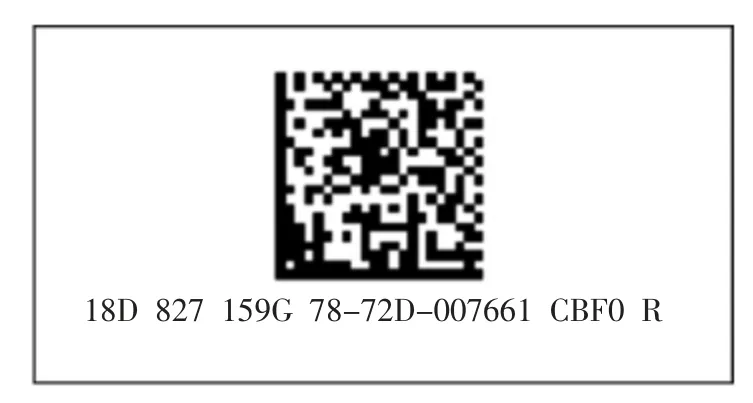
圖5 Tooling 抓手二維碼標(biāo)簽
該二維碼編碼方式簡(jiǎn)單,信息量大,可自行根據(jù)需求進(jìn)行自定義,而且非常便于維護(hù)。
3.2 身份識(shí)別與驗(yàn)證
(1)二維碼標(biāo)簽的識(shí)別。在抓手更換小車(chē)的某一固定位置(與抓手二維碼安裝位置對(duì)應(yīng))上安裝標(biāo)簽識(shí)別器。當(dāng)操作工人將待生產(chǎn)零件抓手安裝在抓手更換小車(chē)上時(shí)將立即喚醒識(shí)別器對(duì)當(dāng)前抓手信息進(jìn)行讀取;
(2)識(shí)別碼的信息傳輸。標(biāo)簽識(shí)別器讀到相應(yīng)的抓手信息后,會(huì)通過(guò)硬件連接的無(wú)線數(shù)傳模塊,將讀取到的信息進(jìn)行無(wú)線發(fā)送,中央控制器無(wú)線信號(hào)接收模塊將負(fù)責(zé)所有無(wú)線信號(hào)的接收,采用多發(fā)一收的星形網(wǎng)絡(luò)系統(tǒng)。無(wú)線電臺(tái)采用多頻通信方式,抗干擾能力強(qiáng),跨越障礙,保障通訊穩(wěn)定。
(3)控制器的處理。無(wú)線接收端接收到無(wú)線發(fā)送過(guò)來(lái)的信息后,通過(guò)串口將信息傳輸給控制器,控制器對(duì)信息進(jìn)行處理,并通過(guò)數(shù)據(jù)庫(kù)進(jìn)行比對(duì)當(dāng)前接受數(shù)據(jù)的有效性和準(zhǔn)確性,再經(jīng)過(guò)耦合器傳給生產(chǎn)設(shè)備主控,從而使能整線抓手的更換。控制器有對(duì)相應(yīng)的信息HMI、故障或警告等顯示,以方便操作人員快速定位故障點(diǎn)。如圖6 所示為識(shí)別系統(tǒng)硬件安裝位置分布示意圖。
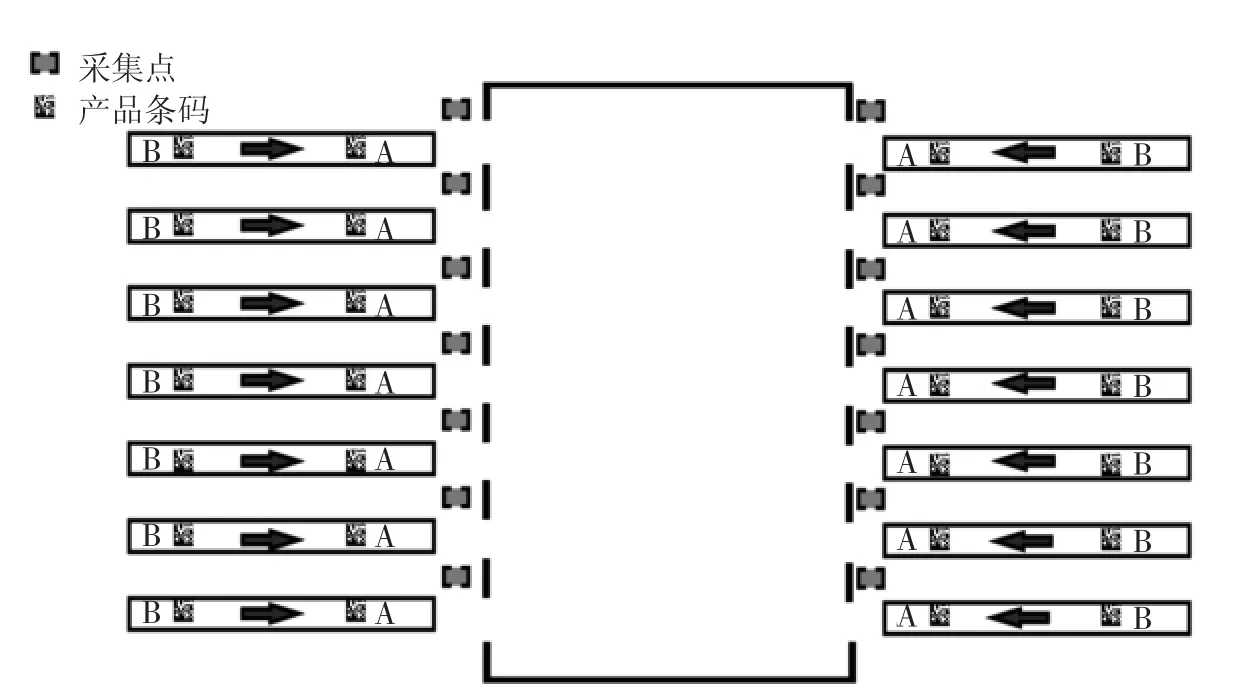
圖6 系統(tǒng)硬件安裝位置分布示意圖
3.3 信號(hào)隔離
網(wǎng)絡(luò)安全是方案制定時(shí)需要重點(diǎn)考慮的因素,系統(tǒng)集成不僅存在兼容問(wèn)題,而且會(huì)造成通訊負(fù)擔(dān),從而影響原有機(jī)床設(shè)備驅(qū)動(dòng)系統(tǒng)的穩(wěn)定運(yùn)行。因此,本文給出的方案采用物理隔離的方法,完全避開(kāi)了不同網(wǎng)絡(luò)系統(tǒng)之間的通訊問(wèn)題。
具體實(shí)現(xiàn)是,上位機(jī)通過(guò)Ethcat 通訊協(xié)議與I/O 端口即EK1100 耦合器端口連接(圖7),生產(chǎn)設(shè)備主控系統(tǒng)通過(guò)Profinet 通訊協(xié)議與I/O 端口即PLC S7-300 端口連接,上述兩種I/O 端口通過(guò)邏輯電平信號(hào)連接,對(duì)設(shè)備主控制系統(tǒng)安全性、穩(wěn)定性不產(chǎn)生任何影響。
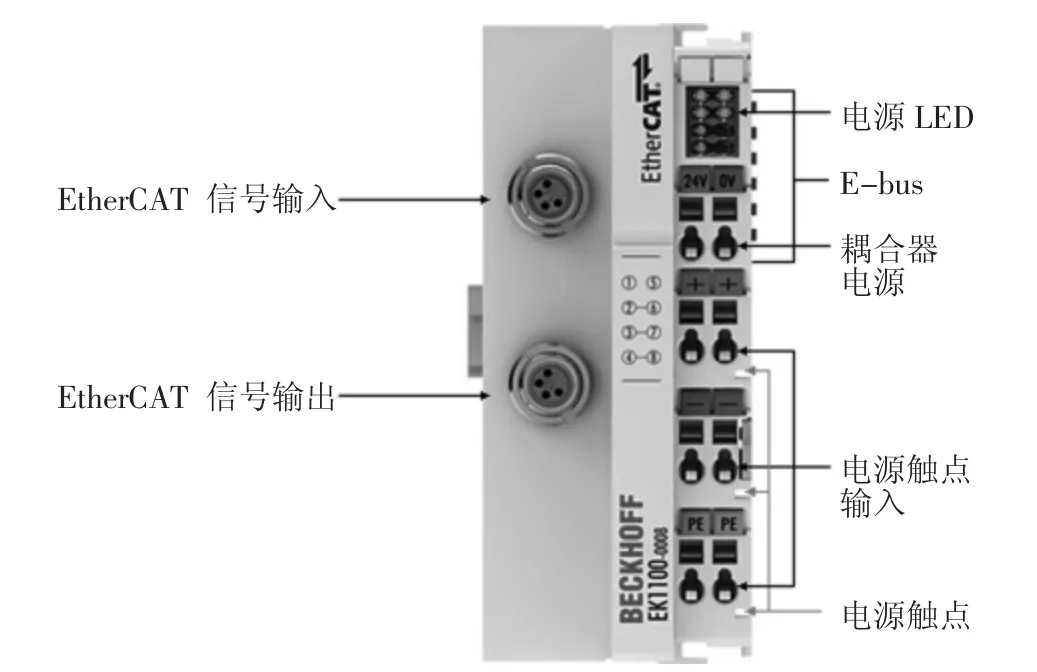
圖7 EK1100 耦合器
4 系統(tǒng)實(shí)現(xiàn)
為驗(yàn)證本文所提出機(jī)械手Tooling 抓手自動(dòng)識(shí)別系統(tǒng)的有效性,在兩條高速?zèng)_壓線安裝部署了26套條碼識(shí)別器,并在上位機(jī)利用VB 語(yǔ)言編寫(xiě)了信息顯示頁(yè)面,操作人員可實(shí)時(shí)查看識(shí)別信息及錯(cuò)誤警告,及時(shí)發(fā)現(xiàn)并處理異常故障,如圖9 所示。
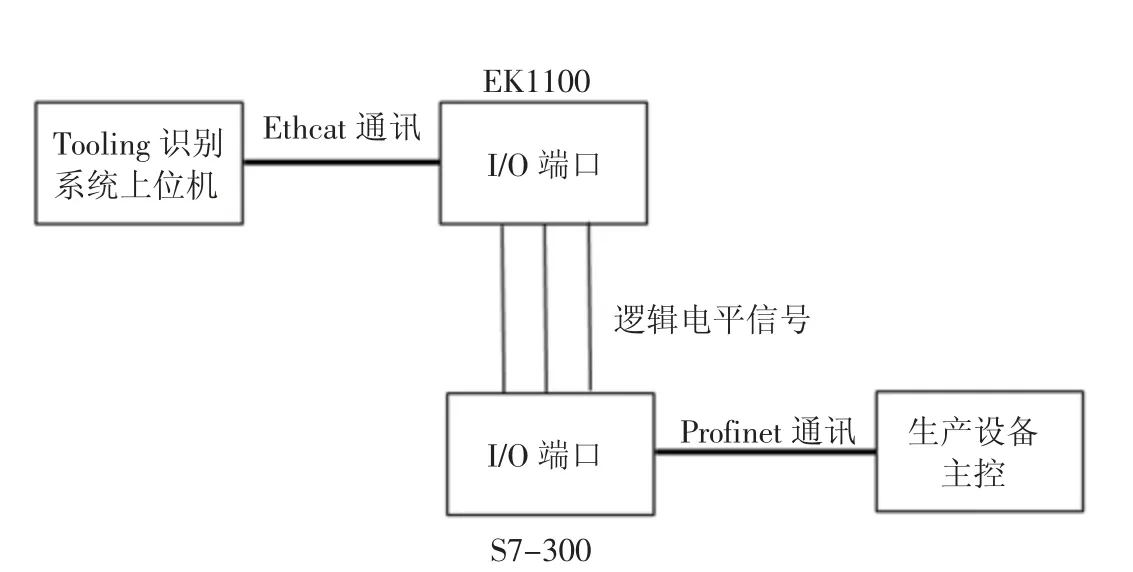
圖8 設(shè)備與機(jī)械手Tooling 抓手識(shí)別系統(tǒng)物理隔離
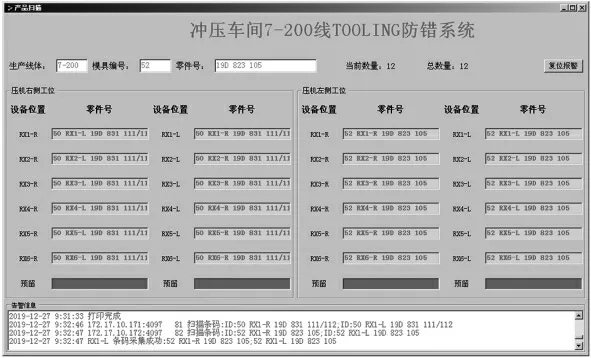
圖9 上位機(jī)信息顯示窗口
此外,機(jī)械手Tooling 抓手自動(dòng)識(shí)別系統(tǒng)的邏輯結(jié)果也將通過(guò)電平信號(hào)發(fā)送到?jīng)_壓線主控,作為壓機(jī)整線啟動(dòng)的串聯(lián)使能信號(hào)。同時(shí)壓機(jī)主控HMI 也配置了相應(yīng)的故障報(bào)警信息,一旦識(shí)別錯(cuò)誤,同步觸發(fā)設(shè)備故障報(bào)警燈通知設(shè)備操作人員進(jìn)行處理,如圖10 所示。
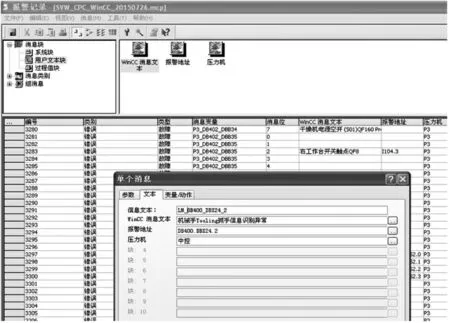
圖10 壓機(jī)主控HMI 報(bào)警信息配置
5 結(jié)論
本文針對(duì)大型沖壓生產(chǎn)線不同零件生產(chǎn)過(guò)程中,機(jī)械手抓手應(yīng)用數(shù)量大、種類(lèi)多、結(jié)構(gòu)相似等特點(diǎn),從高架庫(kù)位備模時(shí)容易出錯(cuò)從而造成設(shè)備碰撞問(wèn)題,根據(jù)抓手的零件號(hào)、工位信息等,設(shè)計(jì)能夠唯一識(shí)別其身份的二維碼標(biāo)簽,并在換模過(guò)程中通過(guò)安裝在設(shè)備端的二維碼讀碼器進(jìn)行信息讀取,通過(guò)無(wú)線數(shù)傳模塊將獲取的信息上傳上位機(jī)與數(shù)據(jù)庫(kù)信息進(jìn)行匹配,并將匹配結(jié)構(gòu)發(fā)送給壓機(jī)整線運(yùn)行使能信號(hào)中。
目前所有車(chē)型機(jī)械手Tooling 抓手的身份信息編碼,簡(jiǎn)單、易讀、可編輯、易維護(hù),且后續(xù)可擴(kuò)充;在生產(chǎn)前抓手安裝在小車(chē)時(shí),即可喚醒系統(tǒng)對(duì)機(jī)械手Tooling 抓手信息進(jìn)行讀取識(shí)別,完全不占用生產(chǎn)時(shí)間;采用無(wú)線信號(hào)傳輸,完全不破壞現(xiàn)有的設(shè)備結(jié)構(gòu),且系統(tǒng)穩(wěn)定可靠;該系統(tǒng)完全集成到了生產(chǎn)設(shè)備系統(tǒng)中,并實(shí)現(xiàn)了物理隔離,對(duì)設(shè)備主控制系統(tǒng)安全性、穩(wěn)定性不產(chǎn)生任何影響。具有廣泛的應(yīng)用前景。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小學(xué)科學(xué)(學(xué)生版)(2020年10期)2020-10-28 07:52:12
中國(guó)化肥信息(2020年7期)2020-03-19 01:54:02
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中國(guó)軍轉(zhuǎn)民(2017年6期)2018-01-31 02:22:28
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25