增強現實輔助電磁導航下的內鏡逆行胰膽管造影膽管插管定位技術模型研究
2022-01-28 10:00:40張大涯令狐恩強李明陽
解放軍醫學院學報 2021年11期
關鍵詞:模型
張大涯,楊 碩,吳 浪,令狐恩強,李明陽
1 解放軍總醫院研究生院,北京 100853;2 解放軍總醫院第一醫學中心 消化內科,北京 100853;3 北京理工大學 混合現實與新型顯示工程技術研究中心,北京 100081
筆者早前研究描述了在3D 打印的膽道模型中,電磁導航系統可以精確地輔助內鏡下逆行胰膽管造影術(endoscopic retrograde cholangiopancreatography,ERCP) 膽管插管[1]。但該模型實驗中屏幕上的導航信息與手術場景是分離的。為了獲取導航信息,術者要在屏幕與手術臺投影之間不斷地切換視野,這影響了手術的順利進行。增強現實(augmented reality,AR)技術可以將計算機產生的虛擬物體融合于真實場景中,具有虛實融合、實時交互和輔助增強的特點[2]。當前,AR 已成為肝手術和內窺鏡的導航輔助手段[3]。目前尚未見AR 輔助導航技術與ERCP 結合的研究。本研究應用AR 輔助電磁導航系統引導膽道模型ERCP 膽管插管,探討其應用的可行性,為進一步動物實驗和臨床研究奠定基礎。
資料與方法
1 資料來源 選取解放軍總醫院第一醫學中心2021年6 月1例肝內外膽管擴張患者的影像學資料。患者女性,83 歲,診斷為膽總管結石,行ERCP 取石術,術后恢復順利。本研究已通過解放軍總醫院第一醫學中心倫理委員會審批(S2021-415-01)。患者及家屬均簽署相關知情同意書。
2 膽道CT 影像的三維重建 獲取患者0.625 mm層厚的腹部CT 醫學數字成像和通信標準格式數據。使用三維重建軟件(北京精診醫療科技有限公司,中國)對膽道行三維重建,獲取標準三維圖形文件(STL)。
3 制作膽道模型“靶目標” 根據STL 文件采用樹脂材料打印1∶1.36 的膽道模型,在模型左后肝管分支嵌入一個標記物,即電磁定位精準導航的“靶目標”。
4 體模CT 圖像的三維重建 將膽道模型固定在人體腹部體模中,并在體模基底和皮膚表面分別貼上2個配準標志物和10個標記物(圖1),對體模進行CT 平掃,得到STL 文件。本實驗的配準標志物中含有金屬球,標記物為直徑5.0 mm 的圓柱形模型,可滿足導航定位需求。

圖1 體模三維重建 A:膽管模型;B:腹部體模Fig.1 3D reconstruction of the phantom A:bile duct model;B:abdomen phantom
5 安裝實驗裝置 包括電磁導航系統(Aurora,NDI 公司,加拿大)、ERCP 設備、模擬呼吸裝置、手術導航系統、腹部體模和具有高性能數據處理能力的計算機(圖2)。乳頭括約肌切開刀(威爾遜-庫克醫學公司,美國)通道內置磁探頭,磁探頭尖端與乳頭切開刀頭端處于同一位置(圖3)。

圖2 導航實驗設備組成Fig.2 Composition of navigation experiment equipment
6 注冊配準 通過術前CT 圖像獲得體膜標志物的圖像坐標,實驗中再獲取其磁場坐標,基于特征點配準算法完成配準,直到配準誤差<1 mm,并記錄電磁導航的注冊配準誤差[4]。
7 構建增強現實平臺 通過標志靶版(圖4)將虛擬膽管模型投影在腹部模型皮膚表面,然后分別獲取真實皮膚靶點與虛擬投影靶點中心的坐標值,并分別記錄皮膚表面每個虛擬靶點與真實靶點間的歐式距離,作為AR 融合誤差。每組測定10個標記靶點,共測量10 組,記錄各靶點平均融合誤差,量化分析增強現實的精度。AR 平均融合誤差<10 mm,則符合臨床要求[5]。

圖4 體模的AR 融合效果圖,其中紅色圓球為分割所得虛擬靶點Fig.4 AR fusion rendering of the phantom,in which the red sphere is the virtual target obtained by CT segmentation
8 體模實驗 應用AR 輔助電磁導航軟件可實時顯示電磁追蹤下乳頭括約肌切開刀在膽道3D 打印模型中的位置。在定位跟蹤下,行乳頭括約肌切開刀膽管插管探查,并測量切開刀到達膽管模型靶點時圖像空間中傳感器與靶點之間的距離,即體模電磁導航精度誤差。根據De Jong 等[6]的報道,在體模中加入運動裝置后,在設定的最大呼吸浮動下進行乳頭括約肌切開刀膽管插管。
9 分割ERCP 術中膽道影像 采集并分割ERCP患者在麻醉狀態的左側臥位和平臥位兩個呼吸相膽管造影X 線下的動態序列影像。
結 果
1 體模注冊配準誤差 10 次測試,平均誤差為(0.337±0.004) mm。見表1。
2 體模AR 融合誤差 10 組實驗,總平均值為(2.76±0.16) mm。見表1。
3 增強現實顯示 乳頭括約肌切開刀在進入肝總管分叉處、左肝管分支和右肝管分支前,可在CT 影像中被實時追蹤導航,并精準進入目標膽管,同時增強現實顯示效果良好。見圖5。
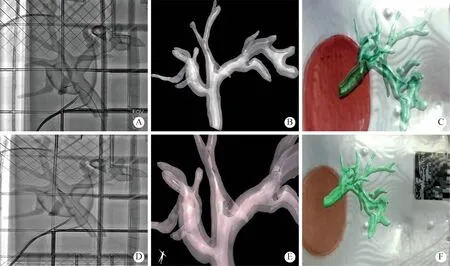
圖5 電磁導航追蹤下乳頭括約肌切開刀在體模的探查圖例A:切開刀進入膽道模型的右肝管;B:綠色標記為電磁導航系統顯示磁探頭位于右肝管;C:AR 界面上的紅點顯示磁探頭位于右肝管;D:切開刀進入膽道模型的左后肝管屬支,且到達目標靶點;E:綠色標記為電磁導航系統顯示磁探頭位于左后肝管屬支,黃色標記表示目標靶點在三維圖像的位置;F:AR 界面上的紅點顯示磁探頭位于左后肝管屬支Fig.5 Detection legend of the sphincterotomy in the phantom under electromagnetic navigation trackingA:Sphincterotomy enters the right hepatic duct of the biliary tract model;B:The green mark means that the electromagnetic navigation system is located in the right hepatic duct;C:The red dot on the AR interface shows that the magnetic probe is located in the right hepatic duct;D:Sphincterotomy enters the branch of the left posterior hepatic duct of the biliary tract model,and reaches the target point;E:The green mark indicates that the magnetic probe is located in the branch of the left posterior hepatic duct by electromagnetic navigation system,and the yellow mark indicates the target in the three-dimensional image;F:The red dot on the AR interface shows that the magnetic probe is located in the branch of the left posterior hepatic duct
4 體模電磁導航精度誤差 10 次實驗,平均值為(0.949±0.033) mm。見表1。
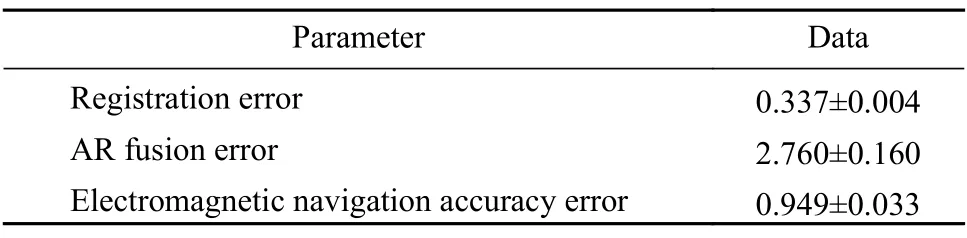
表1 體模電磁導航誤差參數(mm)Tab.1 Electromagnetic navigation error parameters of the phantom (mm)
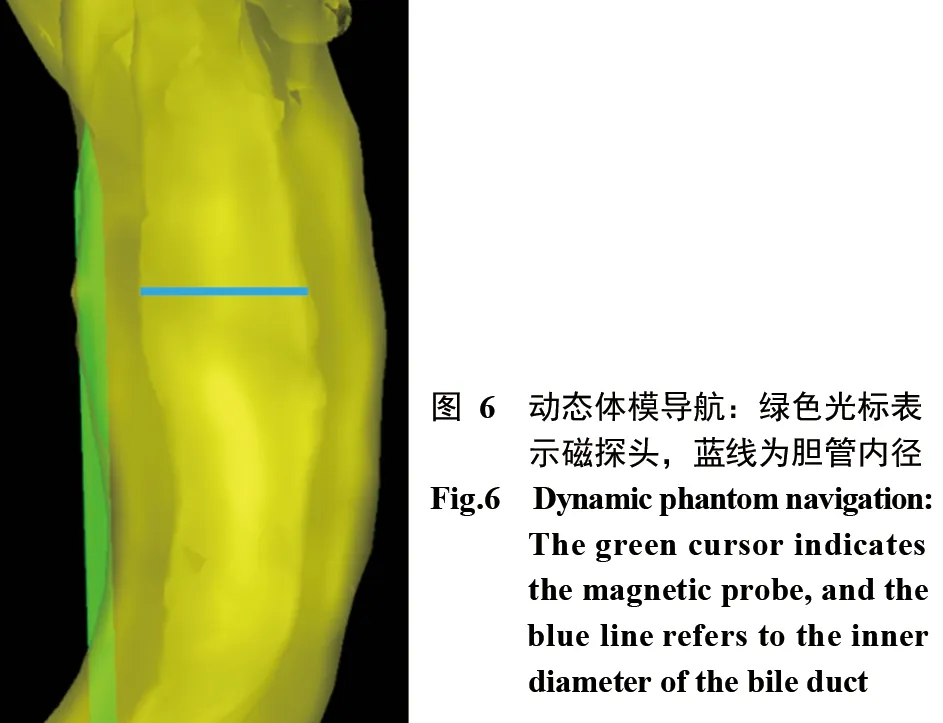
5 動態體模導航 在最大呼吸浮動下,膽管模型內的磁探頭在導航顯示上已在膽管內徑外。見圖6。
6 術中動態膽道影像分割 膽道位置和形態隨患者呼吸脈搏和體位的變化而變化。
討 論
在消化系統研究中,Tang 等[7]首次報道了有關AR 導航技術應用于膽道鏡的研究,通過在膽道鏡內部安裝電磁傳感器,跟蹤其在3D 打印模型中的軌跡,基于AR 導航平臺,在3D 打印模型上實現精準導航。我們的研究發現AR 輔助電磁導航系統定位與ERCP 乳頭切開刀進入的膽道打印模型中膽道屬支基本匹配,其導航精度誤差為(0.9490±0.0331) mm。在臨床實際應用中,<2 mm 的導航精度是非常理想的[4]。
目前導航技術多用于神經外科和骨科[8-9]。主要是因為這兩個科室疾病可以參照手術區域的骨性結構較多,沒有呼吸運動干擾、軟組織變形等影響,配準手術路線相對容易,可以實現較為精準的導航精度。但腹部區域的AR 手術導航系統易受運動、呼吸的影響,這使導航注冊過程變得更困難[10]。我們的模型是靜態模型,而真實膽道會受自身呼吸和脈搏影響而相對移動[11]。因此,AR 輔助電磁導航引導ERCP 膽管插管應用于臨床,其最大的難度是配準精度。有研究為了減少臨床病例呼吸運動和體位變化對導航腎穿刺的影響,采用與術中同一體位拍CT 及麻醉狀態下短時間控制呼吸的辦法[12-13]。筆者認為此種方法不適合用于ERCP 手術。大量采集ERCP 患者術前CT 和相應的術中膽道顯影X 線下1個呼吸相位的動態序列,進一步分割能解決術前和術中真實膽道與呼吸脈搏和體位相關的注冊影響的技術方面難題。
ERCP 乳頭括約肌切開刀進入人體膽管時可能迷失方向。應用支氣管鏡電磁導航程序可使真實內鏡所見與虛擬內鏡畫面進行匹配,進而校正內鏡位置[14]。有研究發現一種基于單目內窺鏡的增強現實復雜先心病畸形病灶定位方法,有精準的增強現實效果[15]。這種通過內窺鏡進行虛實配準的方法類似于一種自動圖像識別或多點識別技術[16]。未來我們也將嘗試選用ERCP 下膽道顯影實時畫面與虛擬膽道畫面進行二次配準。
綜上,本研究將AR 輔助電磁導航系統引入ERCP 膽管插管,在基于膽道3D 打印模型的試驗中可達到精確的導航效果。雖然應用于臨床仍需解決一些技術問題,但筆者認為這些技術難題通過研究終將被解決,該項導航技術一定有臨床應用前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
