采煤機記憶截割系統設計及試驗研究
2022-01-27 06:29:10高立強
機械管理開發 2021年12期
高立強
(西山煤電集團公司設備租賃分公司, 山西 太原 030053)
引言
采煤機為綜采工作面的關鍵設備,其自動化水平直接決定了整個煤礦的生產能力和生產效率。在實際截割過程中,三角煤為較難處理的煤層。為保證生產效率,處理三角煤時常以斜切進刀方式為主。通常情況下,針對三角煤需要在工作面行走一個循環中進刀兩次。加之,由于煤層、地質條件的復雜性,實現采煤機的自動化記憶截割尤為重要,對于最終實現綜采工作面的“無人化”開采作業尤為重要[1]。本文將重點完成采煤機記憶截割系統的設計,并對記憶截割系統的應用效果進行試驗研究。
1 采煤機記憶截割系統概述
1.1 采煤機概述
目前,應用于綜采工作面較為廣泛的采煤機為雙滾筒采煤機,其包括左右兩個截割部、牽引部及相關的電氣系統和液壓系統。在實際截割過程中,采煤機的截割運動是工作面走向牽引運動、滾筒調高運動及推溜運動的集合。其中,牽引運動由采煤機左右行走輪與銷排嚙合實現;滾筒調高運動由調高油缸對滾筒的高度進行控制;推溜運動由刮板輸送機刮板鏈在液壓支架推移油缸的作用下靠向煤層,該運動由液壓支架、刮板輸送機及采煤機共同完成[2]。一般情況下,綜采工作面采煤機的常規工作方式如圖1 所示。
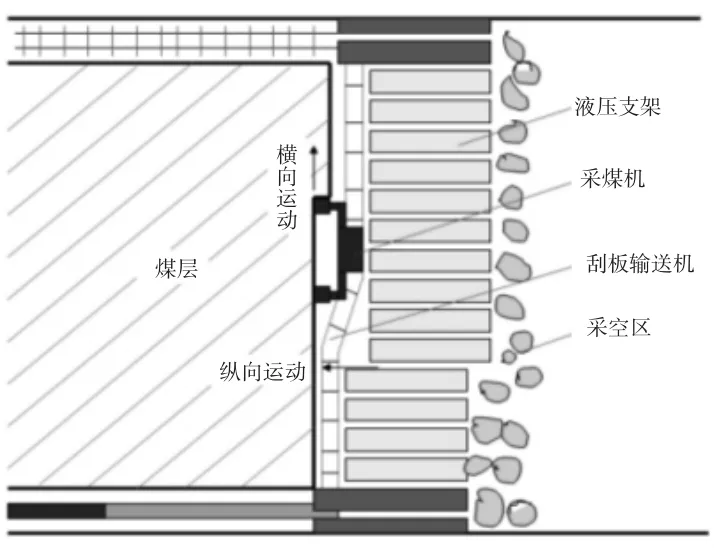
圖1 采煤機常規工作方式
采煤機的進刀方式包括直接推入法進刀、滾筒鉆入法進刀及斜切進刀。其中,直接推入的進刀方式效率較低,應用較少;滾筒鉆入的進刀方式僅適用于采高較小的工作面;斜切進刀方式包括針對端部割三角煤、留三角煤的斜切進刀,中部煤的斜切進刀及半刀斜切進刀四種方式[3]。
1.2 采煤機記憶截割流程的設計
目前,在普通煤層開采的自動化水平可以滿足實際生產的需求。但是,對于工作面的三角煤而言,需采用斜切進刀的方式進行截割,該項工作主要依靠人工手動完成,效率較低。因此,本文重點針對采煤機的端頭完成記憶截割系統的設計。結合采煤機的實際生產需求,其對應的記憶截割工藝流程如圖2所示。
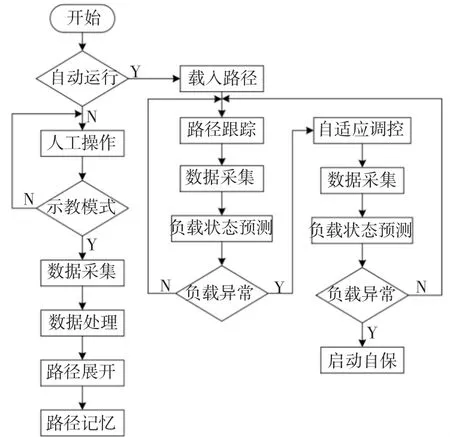
圖2 采煤機記憶截割工藝流程
由圖2 可知,系統首先會對采煤機的自動運行狀態進行判斷。當判定采煤機為自動運行時,根據采煤機載入的路徑對截割滾筒的路徑進行跟蹤,并實時對負載進行采集、預測、判斷,根據分析結果對采煤機自動截割進行自適應調控;當判定采煤機為人工操作時,采煤機分為人工示教和路徑記憶的截割狀態[4]。
2 采煤機記憶截割系統及方法的設計
2.1 采煤機記憶截割系統設計
結合綜采工作面的生產需求,采煤機端頭記憶截割系統包括機載端頭記憶截割系統和順槽遠程端頭記憶截割系統,其主要結構如圖3 所示。
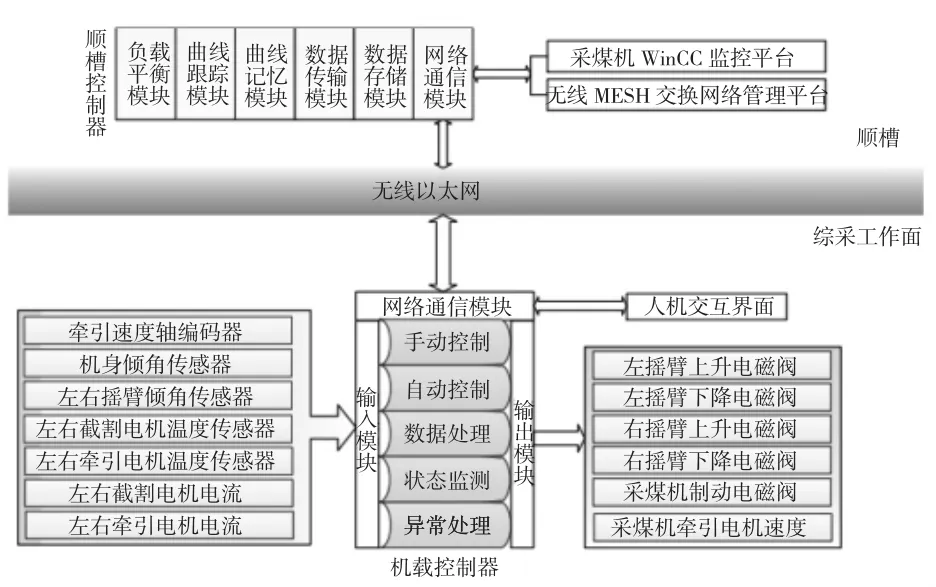
圖3 采煤機端頭記憶截割系統結構
由圖3 可知,采煤機端頭記憶截割系統包括傳感器模塊、處理模塊和控制模塊。其中,傳感器模塊主要是對采煤機牽引速度、采煤機機身傾角、左右滾筒的搖臂傾角、電機溫度及牽引、截割電機的電流進行采集;處理模塊為基于控制器對所采集的信息和狀態得出相應的控制指令,對采煤機左右搖臂、制動、牽引速度進行控制。順槽端頭記憶截割系統與綜采工作面機載端頭記憶截割系統通過無線以太網進行通信。
針對綜采工作面惡劣的工作環境,采用西門子公司的S7-300 系列的PLC 控制器為核心設計對應的機載控制器,并為其配置控制器的各類模塊,配置參數見表1。

表1 機載端頭記憶截割控制器模塊組成
2.2 采煤機記憶截割方法研究
采煤機記憶截割功能實現的基礎在于對采煤機端頭的實時位置進行監測,并完成姿態定位。采煤機記憶截割包括對截割路徑的記憶和對截割路徑的跟蹤[5]。
根據截割點的不同,將記憶點分為常規點和動作點。其中,常規記憶點設定采集的位置間距為1 m;動作記憶點指的是在特殊位置需要操作人員通過控制器發出指令實現對采煤機啟停控制、牽引速度及滾筒位置的控制點信息的記憶。針對三角煤截割效率低的問題,需特別針對其完成動作點的記憶,主要包括以下三個位置點:
1)當采煤機端頭第一正向截割時,對采煤機牽引速度降為0 且采煤機滾筒換方向的位置點進行記憶。
2)當采煤機端頭完成第二刀斜切進刀時,對采煤機牽引速度降為0 且采煤機滾筒換方向的位置點進行記憶。
3)當采煤機端頭第三刀正向截割三角煤時,對此時采煤機牽引速度降為0 且采煤機滾筒換方向的位置點進行記憶。
結合現場采煤機的工作需求,考慮到煤層地質條件對應的記憶截割下油缸的位移見表2,分別包括有四個動作記憶點和八個常規記憶點。

表2 采煤機記憶截割系統記憶點統計
3 采煤機記憶截割系統的試驗研究
為進一步驗證本文所設計的記憶截割系統的性能,將所設計的采煤機端頭記憶截割系統搭建完成后應用于工作面煤層的實際開采中。所應用工作面煤層的平均厚度為4 m,工作面底板的平均傾角為5°,工作面所采用的采煤機為雙滾筒采煤機,具體型號為MG300/700-WD,與之相配套刮板輸送機的型號為SGZ-800/800,并重點對采煤機的跟蹤效果進行驗證,驗證結果如下頁圖4 所示。
由下頁圖4 可知,基于本文所設計的記憶截割系統能夠保證采煤機實際截割過程中的跟蹤路徑與目標路徑保持一致,尤其是能夠針對三角煤截割斜切進刀段保證采煤機具有良好的跟蹤效果。

圖4 采煤機記憶截割系統跟蹤效果
4 結語
采煤機作為綜采工作面的關鍵大型機電設備,保證其生產效率和自動化水平對于提升煤礦的生產能力具有重要意義。為解決工作面三角煤截割時自動化水平且效率低的問題,本文針對性地基于S7-300PLC 控制器設計了端頭記憶截割系統,提出了記憶截割的記憶和跟蹤方法。經實踐表明,本文所設計的端頭記憶截割系統能夠保證采煤機在各種工況尤其是對三角煤截割時的跟蹤效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
防爆電機(2022年1期)2022-02-16 01:14:06
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2016年27期)2017-06-03 23:21:17
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
海外文摘(2016年4期)2016-04-15 22:28:55
河南科技(2014年18期)2014-02-27 14:14:58
