基于現(xiàn)場生產(chǎn)要求的碼垛機器人工作站仿真設(shè)計
2022-01-20 13:29:26嚴(yán)偉
電子制作 2021年24期
嚴(yán)偉
(湖南省工業(yè)技師學(xué)院,湖南岳陽,414000)
0 引言
碼垛機器人由于占地面積小,工作到達(dá)區(qū)域大,碼放精度高,故障率低,可以大幅度提高生產(chǎn)效率,減少人力投入,節(jié)約生產(chǎn)成本,可以很好的解決包裝生產(chǎn)中出現(xiàn)的各種各樣的問題,使得在實際生產(chǎn)中得到大量使用[1]。
1 現(xiàn)實的工作環(huán)境要求
現(xiàn)實的工作環(huán)境是要從傳送鏈上把箱體搬運并碼放到托盤上,每個托盤上碼放5×2的箱體,第一層和第二層的碼放的形式如圖1所示。箱體的尺寸為0.6m×0.35m×0.2m,碼垛工作區(qū)間為0.8m×0.8m×0.3m。托盤的尺寸為1.7m×1.3m,承重約為1噸。要求箱體之間的誤差不能超過±6mm,每小時完成400箱的碼垛。
2 碼垛工作站的選型
根據(jù)現(xiàn)實的工作要求,選擇市場上速度最快,距離可達(dá)到2.4米,最精確,精簡度高,防護等級高,占地面積減少20%的機器人IRB 460[2]。箱體是固體,而且是固定尺寸。再根據(jù)抓取型抓手的特點是用于固體工件,最適合于固定尺寸的箱類,所以選擇抓取型抓手[3]。
3 碼垛工作站仿真模型的構(gòu)建
根據(jù)前面的選型,在Robotstudio仿真軟件ABB模型庫中選擇IRB 460,根據(jù)箱體尺寸的要求,利用三維建模軟件(SW)設(shè)計抓手模型、托盤及底座,如圖2所示。托盤使得箱體平穩(wěn)碼放,底座使叉車能夠快速叉出。
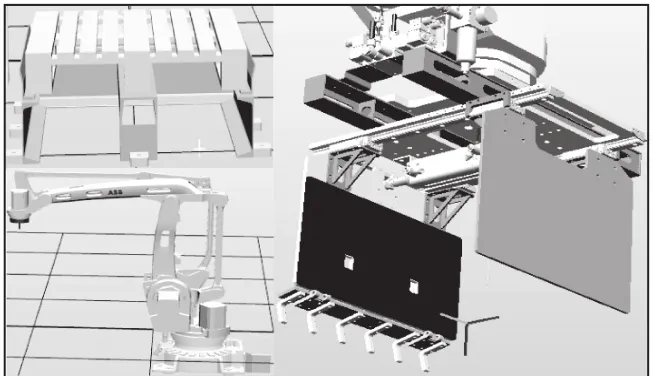
圖2 仿真模型
4 碼垛工作站仿真系統(tǒng)的構(gòu)建
■4.1 系統(tǒng)的構(gòu)建流程
第一步是模型的導(dǎo)入及布局:①導(dǎo)入模型并設(shè)定位置,②創(chuàng)建機器人系統(tǒng);第二步是工件的紋理貼圖:①工件貼圖,②設(shè)定紋理坐標(biāo),③將工件保存為庫文件;第三步是用Smart組件創(chuàng)建動態(tài)輸送鏈:①設(shè)定輸送鏈產(chǎn)品源,②設(shè)定輸送鏈運動屬性,③設(shè)定輸送鏈限位傳感器,④創(chuàng)建屬性與連結(jié),⑤創(chuàng)建信號與連接[4];第四步是用Smart組件創(chuàng)建動態(tài)夾具:①設(shè)定夾具屬性,②設(shè)定檢測傳感器,③設(shè)定拾取放置動作,④創(chuàng)建屬性與連結(jié),⑤創(chuàng)建信號與連接;第五步是用Smart組件創(chuàng)建動態(tài)叉車:①創(chuàng)建叉車機械裝置,②設(shè)定叉車移動動作,③設(shè)定叉車拾取放置動作,④創(chuàng)建信號與連接;第六步是配置編輯器和工作站邏輯的設(shè)定:①創(chuàng)建控制器單元和I/O信號,②設(shè)定工作站邏輯;第七步是編寫離線程序并仿真:①第一層碼垛程序的編寫,②第二層碼垛程序的編寫;第八步是機器人碼垛仿真設(shè)定與運行:①同步到VC,②仿真順序的設(shè)定,③仿真運行。
■4.2 Smart組件創(chuàng)建動態(tài)輸送鏈、動態(tài)抓手、動態(tài)叉車
用Smart組件創(chuàng)建動態(tài)輸送鏈SC_ssl、動態(tài)抓手SC_zs、動態(tài)叉車SC_cc,其中Source(產(chǎn)品源),每觸發(fā)一次,產(chǎn)生一個碼垛產(chǎn)品復(fù)制品。Queue(隊列),將同類型的物體做隊列處理。LinearMover設(shè)定輸送鏈的運動屬性,表示運動的物體是隊列Queue中的物體,運動方向是X軸的負(fù)方向。PlaneSensor(傳感器),在輸送鏈的末端設(shè)置傳感器,以檢測箱體是否到位。LineSensor(傳感器),工具檢測傳感器,檢測抓手下是否有箱體。Attacher(拾取動作),抓手拾取箱體。Detacher(釋放動作),抓手把箱體釋放到托盤上。zsjj表示抓手夾緊,zsgq表示抓手鉤起。LinearMoverccxq使叉車向前移動到托盤處,LinearMoverccht使叉車向后移動到圍欄外,Attachercc(抬起動作)叉車抬起托盤,Detachercc(釋放動作)叉車把托盤放下,ccxs表示叉車貨叉向上動作,ccxx表示叉車貨叉向下動作。
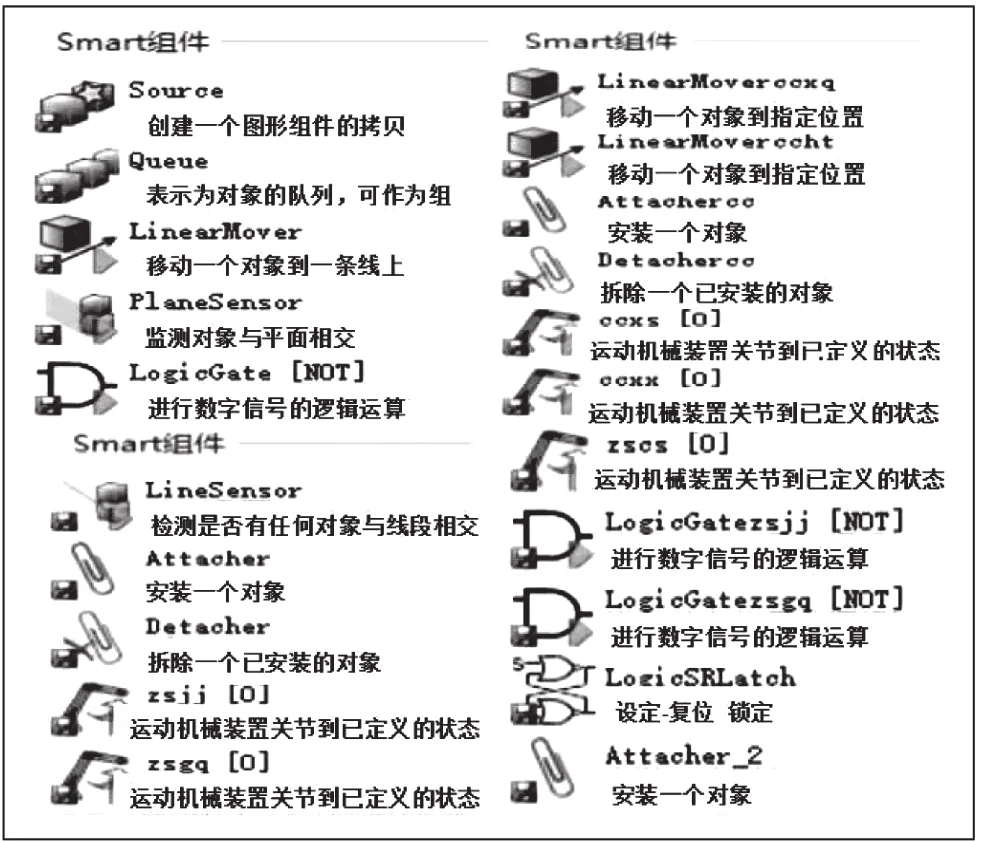
圖3 Smart組件創(chuàng)建
■4.3 輸送鏈、抓手、叉車I/O信號的設(shè)置
I/O信號是本工作站中自行創(chuàng)建的數(shù)字量信號,用于與各個Smart組件進行信號交互,I/O信號連接是指設(shè)定的I/O信號與Smart組件信號的連接關(guān)系以及各Smart組件信號之間的信號連接關(guān)系,如圖4所示。

圖4 輸送鏈、抓手、叉車I/O信號的設(shè)置
disslks信號用于啟動Smart輸送鏈,自動產(chǎn)生一個復(fù)制品。產(chǎn)品源Source產(chǎn)生復(fù)制品的完成信號Executed觸發(fā)Queue組件加入隊列動作Enqueue,復(fù)制品自動加入隊列。復(fù)制品與輸送鏈末端的傳感器PlaneSensor接觸后SensorOut,觸發(fā) Queue退出隊列動作 Dequeue ,輸送鏈上的的箱子停止運動。將傳感器PlaneSensor的輸出信號SensorOut和非門LogicGate[NOT]相連接,非門的輸出InputA變化和傳感器的輸出變化正好相反。用非門LogicGate[NOT]的輸出信號Output觸發(fā)Source的執(zhí)行Execute,即當(dāng)傳感器信號由1變0時,觸發(fā)產(chǎn)品源產(chǎn)生一個復(fù)制品。doxtdw用于箱體到位檢測的輸出信號。產(chǎn)品運動到輸送鏈末端PlaneSensor和限位傳感器接觸后SensorOut,將產(chǎn)品到位信號doxtdw設(shè)置為1。dizsjj用于啟動抓手的夾緊動作,用該信號觸發(fā)傳感器LineSensor開始執(zhí)行檢測,觸發(fā)夾緊動作zsjj[0]執(zhí)行。傳感器LineSensor檢測到物體之后SensorOut觸發(fā)拾取動作Attacher執(zhí)行Execute。 dizsgq用于啟動抓手的鉤起動作, dixtfj用于將碼垛好的箱子附加到托盤上,dosqwc用于機器人拾取動作的完成信號。dicc啟動Smart叉車。
■4.4 工作站I/0信號的設(shè)置
工作站I/0信號的設(shè)置目的是把Smart組件的輸入輸出信號與機器人端的輸入輸出信號進行關(guān)聯(lián),即把Smart組件的輸出信號作為機器人端的輸入信號,把機器人端的輸出信號作為Smart組件的輸入信號,如表1所示。比如機器人端GzzSystem的箱體到位檢測輸出信號doxtdw和Smart組件的輸送鏈SC_ssl啟動輸入信號disslks相關(guān)聯(lián);Smart組件的抓手SC_zs機器人拾取動作的完成輸出信號dosqwc和機器人端GzzSystem的機器人拾取動作的完成信號輸入信號disqwc相關(guān)聯(lián)。
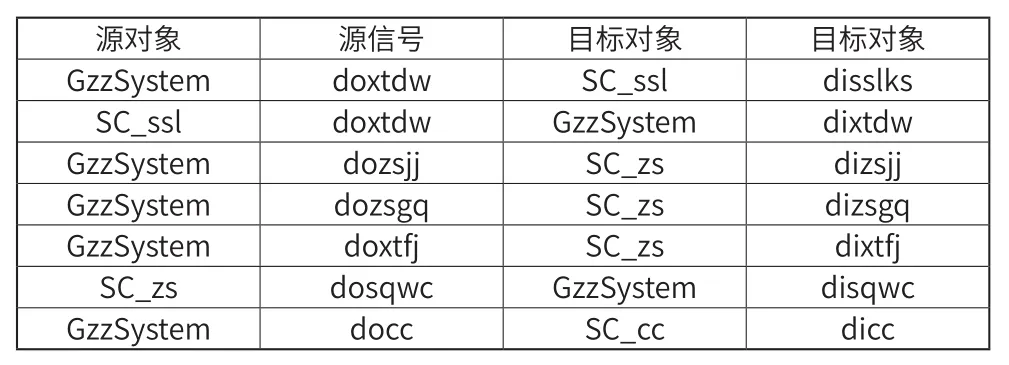
表1 工作站I/0信號的設(shè)置
5 仿真結(jié)果
根據(jù)本文的設(shè)計方法生成了碼垛工作站整體,最后對工作站的進行仿真。從仿真結(jié)果可以看到,完成5×2箱體碼垛,碼垛機器人需要150s,如圖5所示。從機器人將托盤裝滿,加上用叉車將箱體搬走,總計需要160s。按照這個工作過程,1小時將完成420個箱體的碼垛,基本完成實際任務(wù)要求,使得生產(chǎn)線率大大提高。
6 結(jié)語
本文根據(jù)現(xiàn)場碼垛工作要求,選擇好碼垛機器人和末端工具。通過三維建模軟件(SW)和ABB Robotstudio仿真軟件構(gòu)建了碼垛工作站仿真模型和系統(tǒng),通過仿真結(jié)果分析,碼垛箱體的數(shù)量和時間完全符合現(xiàn)場的要求,大大提高了工作效率,為企業(yè)碼垛工作站的設(shè)計提供理論依據(jù)。
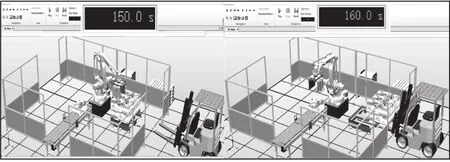
圖5 仿真結(jié)果
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00