視覺融合SLAM魯棒框架研究
2022-01-19 06:30:50王一波梁偉鄯
江蘇通信 2021年6期
王一波 梁偉鄯
柳州工學(xué)院
0 引言
同時(shí)定位與地圖構(gòu)建(Simultaneous Localization And Mapping,簡稱SLAM),通常是指在機(jī)器人或者其他載體上,通過對(duì)各種傳感器數(shù)據(jù)進(jìn)行采集和計(jì)算,生成對(duì)其自身位置姿態(tài)的定位和場景地圖信息的系統(tǒng),其對(duì)于智能機(jī)器人走向應(yīng)用發(fā)揮著關(guān)鍵作用。當(dāng)前,主流SLAM技術(shù)分為激光和視覺兩大類。激光SLAM算法簡單,但成本相對(duì)較高,應(yīng)用具有一定局限性;視覺SLAM利用攝像機(jī)(單目、雙目或者RGBD)可以從環(huán)境中獲取海量的、冗余的紋理信息,擁有超強(qiáng)的場景辨識(shí)能力,將成為今后技術(shù)發(fā)展的主要趨勢,但其算法復(fù)雜,魯棒性較差。以視覺為主要信息收集手段,融合IMU、編碼器等多種傳感器,構(gòu)成視覺融合SLAM框架,可以從根本上克服單視覺SLAM對(duì)光照敏感的問題,更具魯棒特性。而作為成熟的機(jī)器人操作系統(tǒng)ROS,由于支持眾多硬件的軟件端口的同時(shí)掛載,在操作系統(tǒng)層和應(yīng)用層之間架起了一座可靠的技術(shù)橋梁,而日漸得到廣大研究人員的青睞,以其為基礎(chǔ)構(gòu)建SLAM的通用平臺(tái),可低耦合度的分布式進(jìn)程,控制網(wǎng)絡(luò)邏輯清晰,掛載方便,十分便于驗(yàn)證SLAM框架性能。本文將構(gòu)建一個(gè)以維持系統(tǒng)運(yùn)行穩(wěn)定為主的框架,以提高SLAM技術(shù)的魯棒性,增強(qiáng)其在不同環(huán)境和狀況下的適應(yīng)能力。
1 視覺融合SLAM功能架構(gòu)設(shè)計(jì)
1.1 基本功能框架
視覺SLAM利用攝像機(jī)(單目、雙目或者 RGBD)具有重定位、場景分類上無可比擬的巨大優(yōu)勢,但目前受限于硬件技術(shù)性能及軟件算法,尚未取得關(guān)鍵性突破。而慣性傳感器(IMU)具有不受場景和運(yùn)動(dòng)速度限制、實(shí)時(shí)準(zhǔn)確測量無人系統(tǒng)位姿變化的優(yōu)點(diǎn),缺點(diǎn)是長時(shí)間運(yùn)行會(huì)產(chǎn)生累加誤差。本文將以視覺傳感器為主、IMU為輔構(gòu)建視覺慣性融合SLAM,充分利用圖像信息的長時(shí)間穩(wěn)定性和IMU數(shù)據(jù)的短時(shí)間準(zhǔn)確性,從而得到更加魯棒的狀態(tài)估計(jì)結(jié)果。視覺傳感器與IMU的耦合方式可分為剛性連接和非剛性連接,前者即IMU相對(duì)視覺傳感器的空間位置固定,后者是兩類傳感器位置無約束關(guān)系。考慮IMU僅僅作為視覺傳感器的輔助機(jī)構(gòu),避免增加問題的復(fù)雜性,本文選擇剛性連接,即未出現(xiàn)異常情況下,兩傳感器經(jīng)參數(shù)標(biāo)定后的位姿轉(zhuǎn)換關(guān)系不會(huì)發(fā)生改變。
本文的設(shè)計(jì)目的除SLAM系統(tǒng)常規(guī)任務(wù)定位和建圖外,還包括魯棒性設(shè)計(jì),主要通過增加相應(yīng)環(huán)節(jié)提升SLAM系統(tǒng)的環(huán)境性,降低誤報(bào)概率,從而避免無人系統(tǒng)關(guān)鍵應(yīng)用的損失。為了更好地描述需求細(xì)節(jié),通過分節(jié)點(diǎn)解構(gòu)視覺SLAM的任務(wù),同時(shí)理清數(shù)據(jù)流向,整體設(shè)計(jì)如圖1所示。
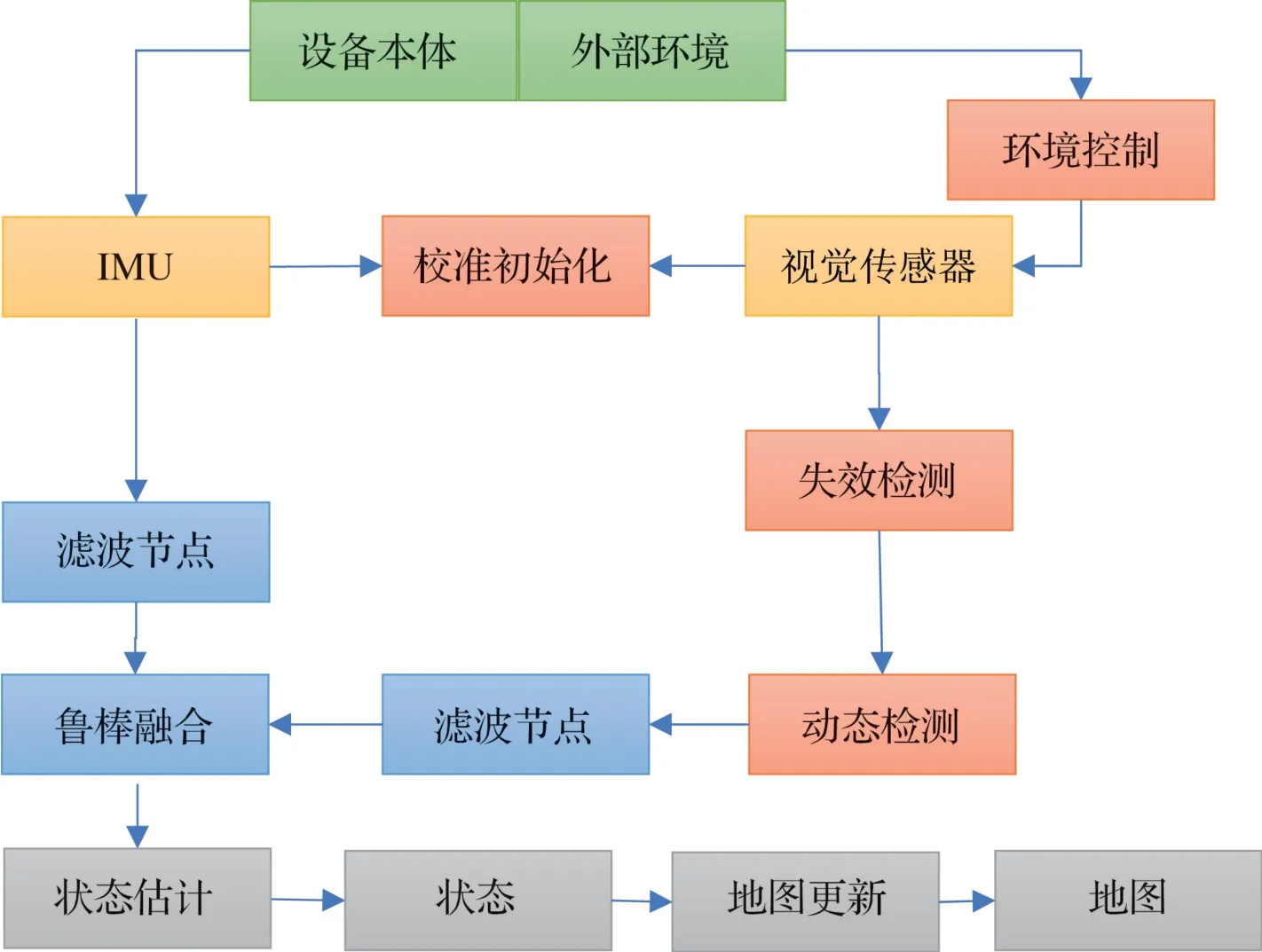
圖1 視覺SLAM功能結(jié)構(gòu)圖
圖1 中視覺傳感器采集外部環(huán)境數(shù)據(jù),IMU采集無人系統(tǒng)本體數(shù)據(jù)(包括加速度、角速度和地磁方向),這與高等動(dòng)物融合視覺和立體感覺來推測自身姿態(tài)的方法十分相似。校準(zhǔn)初始化節(jié)點(diǎn)主要用于兩類傳感器的同步,確保各自狀態(tài)估計(jì)不會(huì)錯(cuò)位;失效檢測主要用于視覺傳感器的即時(shí)失效檢測,起到數(shù)據(jù)過濾功能,確保質(zhì)量低下圖像被濾除;濾波節(jié)點(diǎn)主要用于估計(jì)系統(tǒng)狀態(tài);魯棒融合節(jié)點(diǎn)則對(duì)應(yīng)CI融合魯棒穩(wěn)態(tài)卡爾曼濾波器,用于融合視覺SLAM估計(jì)和里程計(jì)估計(jì)的結(jié)果,形成對(duì)于較大范圍環(huán)境的穩(wěn)定輸出。在此,重點(diǎn)說明環(huán)境控制節(jié)點(diǎn)和動(dòng)態(tài)檢測節(jié)點(diǎn)。
1.2 環(huán)境控制節(jié)點(diǎn)
環(huán)境控制節(jié)點(diǎn)主要負(fù)責(zé)環(huán)境參數(shù)的收集,包括無人系統(tǒng)大致位置、時(shí)區(qū)、時(shí)間、天氣及室內(nèi)或者室外等。無人系統(tǒng)通過連接互聯(lián)網(wǎng)實(shí)時(shí)獲取,主要用于為SLAM系統(tǒng)環(huán)境建模和姿態(tài)估計(jì)提供信息用以輔助決策,以提高視覺SLAM系統(tǒng)的魯棒性。基本原理如下:類比人主要獲取信息的主要渠道是視覺,但視覺會(huì)遵循環(huán)境光照強(qiáng)度變化做出相應(yīng)的調(diào)節(jié),而對(duì)于視覺SLAM系統(tǒng)也是相同的,視覺傳感器對(duì)于天候及環(huán)境也將有著不同的表現(xiàn),比如在雨天、霧天和雪天,會(huì)嚴(yán)重影響成像,甚至?xí)斐梢曈X傳感器失效,如果不做調(diào)整,會(huì)為無人系統(tǒng)的應(yīng)用帶來損失。綜合各種環(huán)境參數(shù),可以換算為環(huán)境的光照亮度范圍,以此作為決策的依據(jù)。具體決策如表1和表2所示。決策依據(jù)光照亮度分為A、B、C三類,分別進(jìn)行數(shù)據(jù)傳輸與任務(wù)決策,用以決定是否進(jìn)行數(shù)據(jù)轉(zhuǎn)發(fā)以及任務(wù)的運(yùn)行和中止,以此提高系統(tǒng)對(duì)環(huán)境的適應(yīng)性。
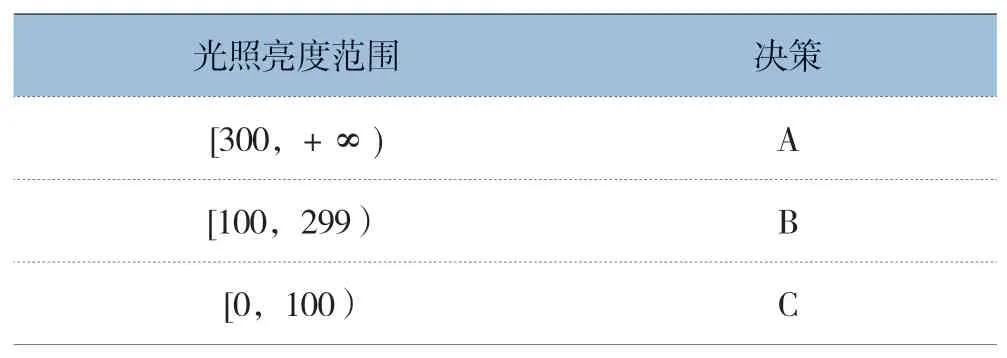
表1 環(huán)境影響決策
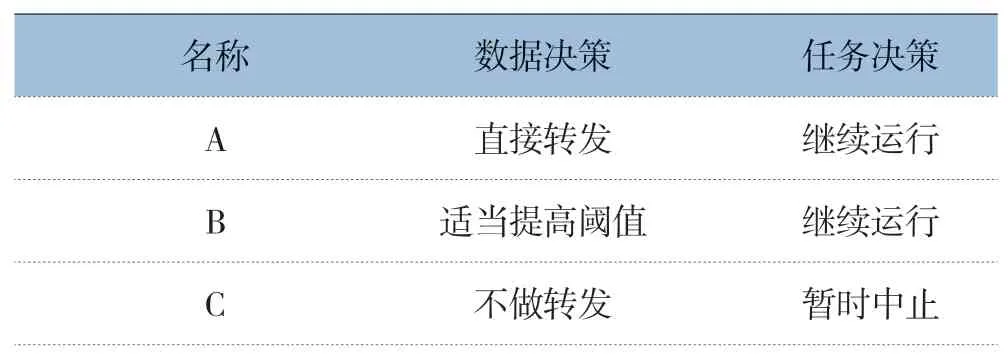
表2 決策說明
1.3 動(dòng)態(tài)檢測節(jié)點(diǎn)
根據(jù)已有經(jīng)驗(yàn),視覺SLAM在靜態(tài)環(huán)境下表現(xiàn)更為魯棒,而當(dāng)場景中出現(xiàn)運(yùn)動(dòng)物體,則會(huì)造成不同程度的影響,而且運(yùn)動(dòng)物體越多,影響將越大。為此,可將場景分為靜態(tài)和動(dòng)態(tài)兩部分,前者是相對(duì)穩(wěn)定不變的背景部分,后者是前景移動(dòng)的目標(biāo)部分,在視覺SLAM應(yīng)用中被認(rèn)為是干擾因素。為降低動(dòng)態(tài)部分的影響,本文設(shè)計(jì)了專門的檢測節(jié)點(diǎn),用以剔除場景中的動(dòng)態(tài)部分。通過訓(xùn)練可實(shí)時(shí)運(yùn)行的You only look once(YOLO)網(wǎng)絡(luò),檢測包括植物、動(dòng)物、交通工具、路標(biāo)等各種室外環(huán)境中的目標(biāo),將其從圖像中分離出來。
Scene={(c_i,n_i,P_i )│i=1,2,…,K} (1)
式中,c_i表示第i類別目標(biāo),n_i表示第i類別目標(biāo)數(shù)量,P_i表示目標(biāo)的位置(包括x、y坐標(biāo)及目標(biāo)高度、寬度)。
2 視覺融合SLAM技術(shù)架構(gòu)設(shè)計(jì)
2.1 基于ROS的硬件框架設(shè)計(jì)
從學(xué)科上看,SLAM屬于機(jī)器人學(xué)的范疇,具有一定的復(fù)雜度,要使其穩(wěn)定可靠運(yùn)行,必須提升技術(shù)架構(gòu)的性能。類比智能手機(jī)目前常用的操作系統(tǒng)Android和iOS的底層分別是開源的GNU/Linux和Darwin,目前移動(dòng)機(jī)器人的開發(fā)多是建立在ROS(Robot operating system)上,其能為復(fù)雜任務(wù)計(jì)算節(jié)約空間和算力,確保各程序在適當(dāng)時(shí)間被執(zhí)行,同時(shí)可以為多進(jìn)程通信提供良好的底層支持。ROS是由Open SourceRobotics Foundation(OSRF)提供的開源的機(jī)器人學(xué)中間件,用于編寫機(jī)器人軟件部分的靈活框架,其集成了各種工具、庫和規(guī)范,旨在簡化在各種機(jī)器人平臺(tái)上控制機(jī)器人實(shí)現(xiàn)復(fù)雜、強(qiáng)大行為的工作。
本文驗(yàn)證平臺(tái)的總體方案是“微型計(jì)算機(jī)上位機(jī)+單片機(jī)下位機(jī)”。上位機(jī)承載ROS,負(fù)責(zé)任務(wù)視覺SLAM與控制,下位機(jī)作為掛載于ROS中的節(jié)點(diǎn)存在,控制具體的控制對(duì)象(如電機(jī)、傳感器等),通用平臺(tái)技術(shù)框架如圖2所示。
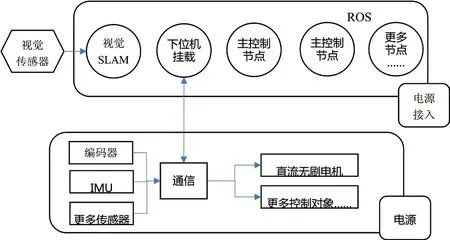
圖2 通用平臺(tái)技術(shù)框架
2.2 節(jié)點(diǎn)通信設(shè)計(jì)
相較于ROS1,ROS2對(duì)通信機(jī)制進(jìn)行了改進(jìn),提出了基于Data Distribution Service(DDS)通信,實(shí)現(xiàn)了無主節(jié)點(diǎn)的去中心化通信及指定分布式訂閱和發(fā)布規(guī)范,廣泛應(yīng)用于醫(yī)療、航空和船舶等對(duì)穩(wěn)定性要求高的領(lǐng)域。本文構(gòu)建了圖3所示的基于DDS(Data Distribution Service)的ROS 2系統(tǒng)的通信技術(shù)架構(gòu),通過將所有節(jié)點(diǎn)數(shù)據(jù)發(fā)布到所在全局?jǐn)?shù)據(jù)域(Global Data Space),實(shí)現(xiàn)了所有節(jié)點(diǎn)也將從全局?jǐn)?shù)據(jù)域訂閱其它節(jié)點(diǎn)數(shù)據(jù)。同時(shí)DDS層也為二次開發(fā)提供了多編程語言的統(tǒng)一接口,可以滿足使用C++、Java和Python在不同操作系統(tǒng)實(shí)現(xiàn)無阻礙的去中心化數(shù)據(jù)交流。圖3中,操作系統(tǒng)層用橙色標(biāo)識(shí),中間件層包含DDS和ROS 2,分別采用綠色和藍(lán)色標(biāo)識(shí),應(yīng)用層即維穩(wěn)框架(SafeguardFramework),用黃色標(biāo)識(shí)。
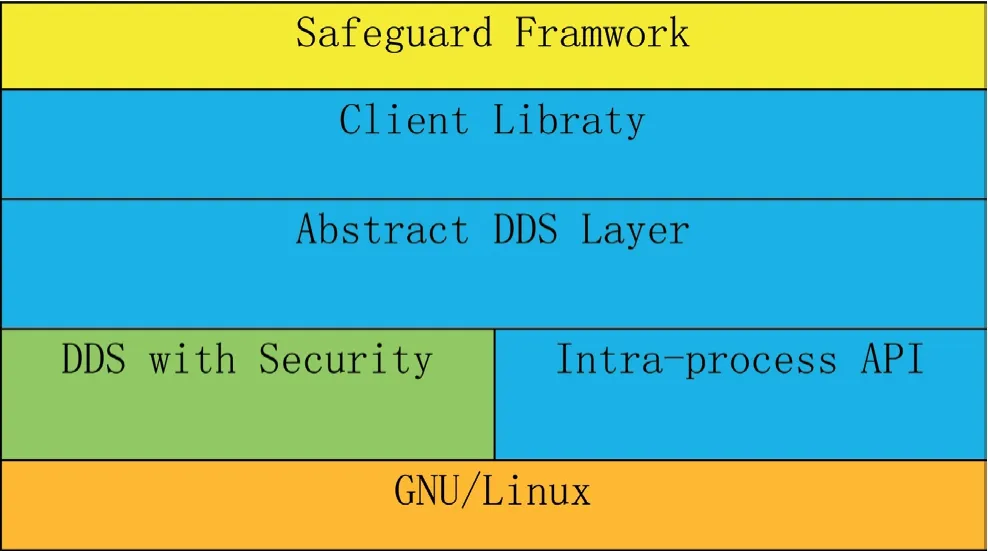
圖3 DDS通信技術(shù)結(jié)構(gòu)圖
3 實(shí)驗(yàn)及分析
選取封閉環(huán)境作為機(jī)器人掃描實(shí)驗(yàn)的環(huán)境,為增加機(jī)器人掃描的完整性,實(shí)驗(yàn)環(huán)境為某校教室,長12米寬9米,現(xiàn)對(duì)封閉環(huán)境進(jìn)行簡單的搭建與設(shè)置,實(shí)驗(yàn)的主要研究對(duì)象是6把椅子和1張講臺(tái),同時(shí)在實(shí)驗(yàn)環(huán)境中還有一些其他的障礙物。實(shí)驗(yàn)環(huán)境如圖4所示。

圖4 實(shí)驗(yàn)環(huán)境
因?qū)嶋H場景中,難以獲得機(jī)器人的真實(shí)軌跡,但場景中物體尺寸可事先測量得到,為此設(shè)計(jì)如下實(shí)驗(yàn):不同光照條件下點(diǎn)云掃描精度實(shí)驗(yàn)、不同運(yùn)動(dòng)速度條件下點(diǎn)云掃描精度實(shí)驗(yàn),比較本文提出的視覺SLAM融合框架與單視覺SLAM。為排除干擾因素,實(shí)驗(yàn)路線如圖5所示,統(tǒng)一為直線行進(jìn)。
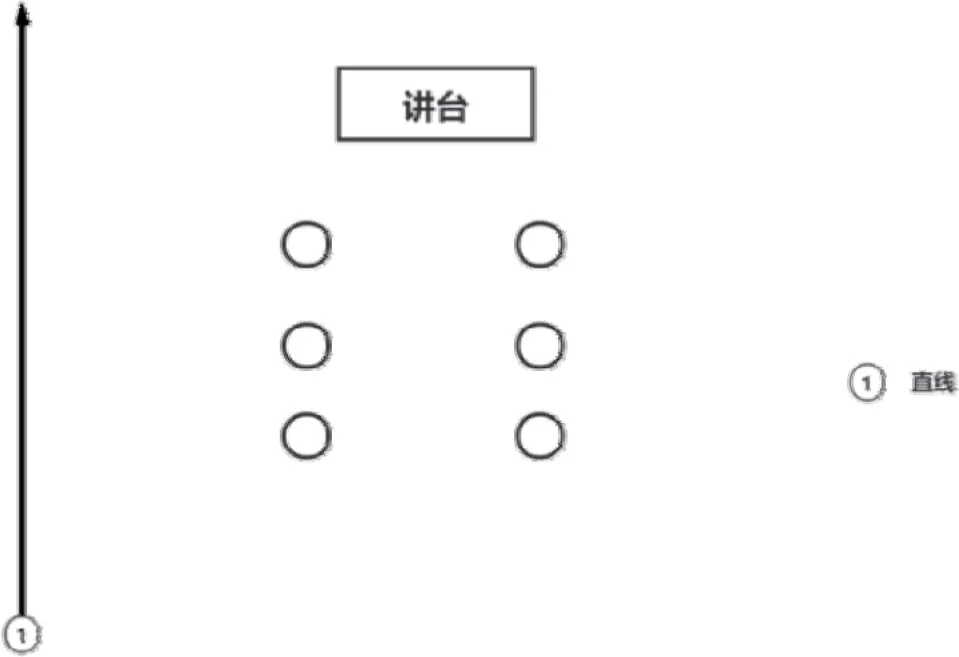
圖5 實(shí)驗(yàn)路線
本次實(shí)驗(yàn)分別選擇上午光照均勻、中午光照較亮及傍晚光照較暗三種自然光照條件下進(jìn)行,為避免速度的影響,實(shí)驗(yàn)過程在速度較慢的條件下完成。
由圖6、圖7可以看出,視覺融合SLAM算法相比單視覺SLAM更穩(wěn)定,二者在光照均勻條件下,掃描點(diǎn)云都比較完整,而在光照較暗或者較亮的條件下,點(diǎn)云都有明顯缺失,但單視覺SLAM更為明顯,這是由于光照變化劇烈時(shí),部分幀特征點(diǎn)缺失,造成建圖丟失。根據(jù)點(diǎn)云數(shù)據(jù)進(jìn)一步對(duì)場景中的物體尺寸進(jìn)行測量,結(jié)果如表3和表4所示。
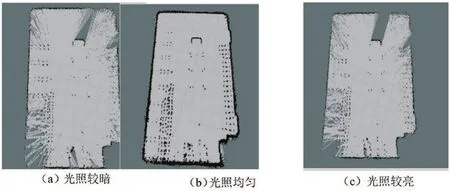
圖6 單視覺SLAM不同光照條件下掃描結(jié)果圖
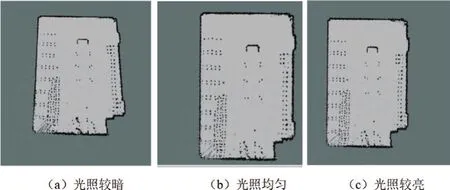
圖7 視覺融合SLAM不同光照條件下掃描結(jié)果圖
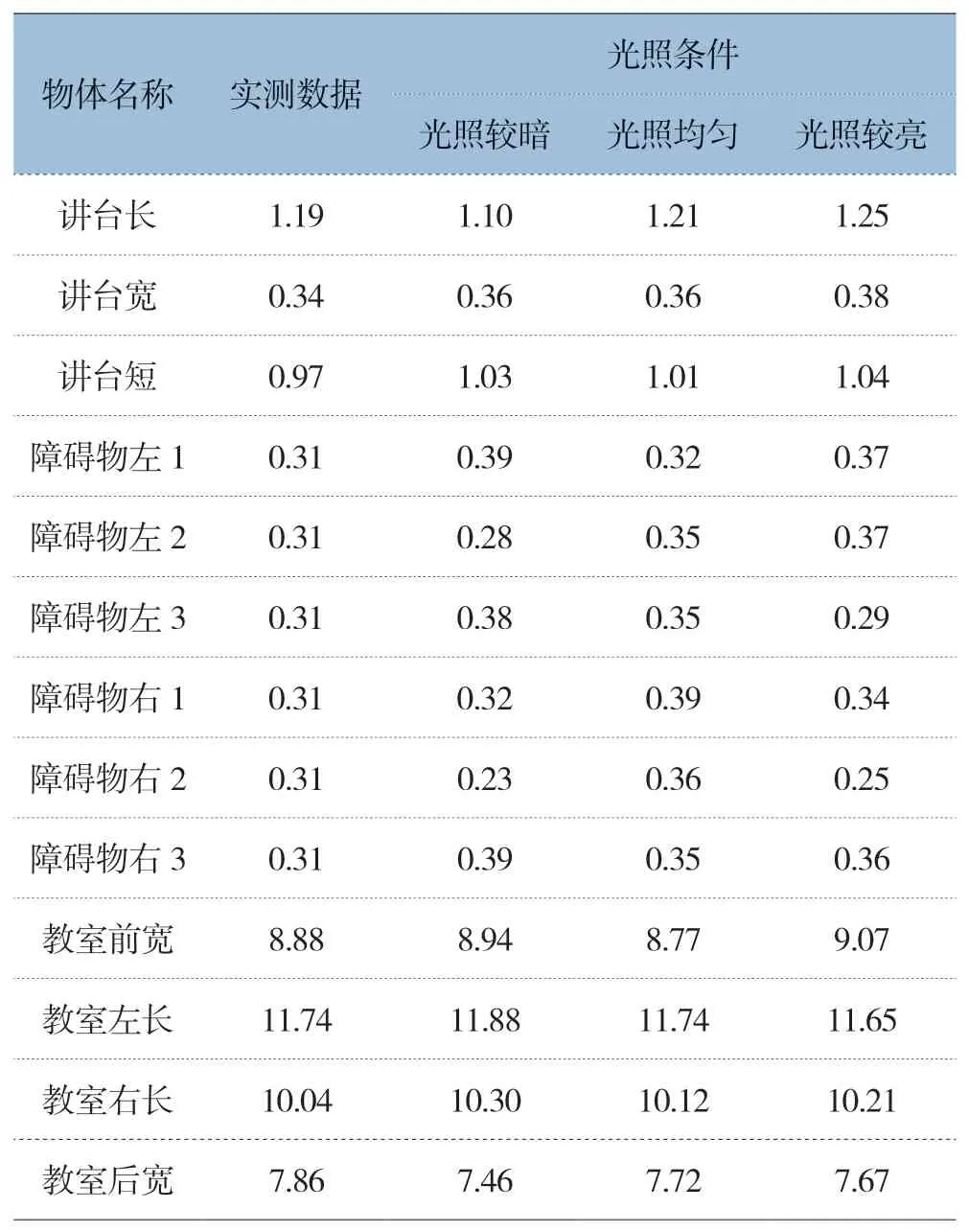
表3 單視覺SLAM不同光照測量結(jié)果

表4 融合視覺SLAM不同光照測量結(jié)果

?
由上表可以看出,單視覺SLAM在光照均勻條件下,最大誤差0.14m,光照較暗、光照較亮條件下最大誤差分別為0.26m和0.17m;融合視覺SLAM在光照均勻條件下,最大誤差0.15m,光照較暗、光照較亮條件下最大誤差分別為0.16m和0.15m。可見光照劇烈變化時(shí),單視覺SLAM受到較大影響,魯棒性較差,融合視覺SLAM在均勻光照條件下,測量精度沒有明顯提高,但對(duì)光照變化的魯棒性發(fā)生了顯著增加,所以視覺融合SLAM框架比單視覺SLAM表現(xiàn)更穩(wěn)定。
4 結(jié)束語
本文提出了一種基于融合視覺的SLAM框架,為提高SLAM魯棒性,從功能設(shè)計(jì)階段充分考慮了環(huán)境及動(dòng)態(tài)過程可能給定位和建圖帶來的影響,專門設(shè)計(jì)了環(huán)境監(jiān)測節(jié)點(diǎn)和動(dòng)態(tài)檢測節(jié)點(diǎn)。在技術(shù)實(shí)現(xiàn)階段,充分利用了ROS2通信的優(yōu)越性,采用DDS方式將上位機(jī)掛載的節(jié)點(diǎn)有效融合在了一起。實(shí)驗(yàn)表明,融合多種傳感器的視覺SLAM框架比單視覺SLAM框架,無論在定位精度還是魯棒性上,都有了一定的提升高,同時(shí)也發(fā)現(xiàn)深度融合多傳感器數(shù)據(jù)是解決機(jī)器人定位的重要方向,今后將圍繞如何在機(jī)理層面實(shí)現(xiàn)融合開展進(jìn)一步的研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年12期)2021-08-24 03:30:40
中老年保健(2021年11期)2021-08-22 03:15:44
中國傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中國生殖健康(2020年6期)2020-02-01 06:28:50
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年11期)2019-01-07 01:28:02

- 江蘇通信的其它文章
- 鐵塔共建共享方案研究
——以中老鐵路通信基站建設(shè)項(xiàng)目為例 - (2020年度“華蘇杯”獲獎(jiǎng)?wù)撐囊坏泉?jiǎng))基于5G電力專網(wǎng)的大規(guī)模源網(wǎng)荷精準(zhǔn)控制系統(tǒng)
- 論通信機(jī)房電壓自動(dòng)均衡的蓄電池組監(jiān)控系統(tǒng)
- 數(shù)據(jù)加密技術(shù)在網(wǎng)絡(luò)通信安全中的應(yīng)用研究
- 人工智能算法在5G套餐潛在用戶識(shí)別中的應(yīng)用
- 深度循環(huán)神經(jīng)網(wǎng)絡(luò)對(duì)水下光信道的非線性補(bǔ)償