井架攀爬機器人設計與分析
2022-01-17 08:57:42竹錦霞
自動化儀表 2021年10期
涂 樸,嚴 鵬,竹錦霞,夏 林,何 潔
(1.四川文理學院智能制造學院,四川 達州 635000;2.貴州航天天馬機電科技有限公司,貴州 遵義 563000;3.中國石油集團川慶鉆探工程有限公司,四川 成都 610213)
0 引言
作為起升系統的支撐體,石油井架的安全性與穩定性在很大程度上影響著石油鉆采的進程。由于石油鉆機井架惡劣的作業環境以及搬遷、安裝等過程中其他不可抗拒因素的影響,石油井架主體鋼架結構會逐步產生不同程度的腐蝕、磨損、疲勞和變形等局部或整體缺陷。這些缺陷將嚴重降低石油井架的工作壽命、工作效率、承載能力、生產安全系數等綜合性能,為鉆井、修井作業帶來嚴重的安全隱患[1]。
為使井架損傷能夠被及時發現和修復,以免釀成生產事故,保證生產的正常運行,需要定期對石油井架進行相關安全評定。就井架安全評定而言,國外目前主要側重于外觀勘察、簡易診斷、一般處理與預防這3個方面。其中,外觀勘察主要是針對明顯缺陷,例如截面銹蝕、桿件初始彎曲、井架整體初變形、節點剛性降低等[2];簡易診斷多側重于定性分析;處理與預防局限于井架理論分析和測試研究的基礎。在國內,對結構的研究要么是以強度、剛度、穩定性理論為主的評定理論,要么是可靠性評定理論和模糊評定理論。因為井架結構本身相對復雜,且缺陷相對多樣,所以難以獲得精確評定結果的方法。因此,在實際工程中是通過井架現場承載試驗測取井架的應力、位移及結構動態特性,并根據現場測試結果采用安全評定理論以線性外推的方法確定在用井架的安全承載能力[3]。但此種方法費時耗力。
此外,井架立柱缺陷作為影響井架承載能力的最大因素,存在著一種“隱形”的缺陷[4]——內蝕:若主立柱是管柱型材且存有孔隙,雨水就有可能通過孔隙滲透到立柱內部,從而產生封閉銹蝕,在雨水銹蝕作用下,立柱壁會變薄。目前,陸地應用較廣的是K 形井架[5]。K形井架受載時,其最大受力部位為井架大腿。井架大腿的強度大小決定整個井架的承載能力。若其井架大腿發生局部桿件截面銹蝕,會使得截面尺寸減小,從而引起大腿應力的變化,進而影響整個井架的穩定性[6]。因此,對井架大腿內部銹蝕進行檢測顯得尤為重要。隨著探傷科技的飛速發展,越來越多的無損探傷設備應用在各種工程領域。這些檢測設備不僅可以檢查出肉眼無法察覺的工件內部缺陷,也可以極大地提高檢查的準確性和可靠性。
本文研究的目的在于設計一種攀爬機器人,以攜帶檢測設備儀器對井架主立柱進行探傷,檢測出“隱藏”的缺陷。
1 機器人結構與步態
1.1 機器人結構
本文主要以JJ225/45-K型井架為攀爬對象完成相關設計。該井架高度為45.2 m,井架大腿采用320 mm×200 mm×5 mm的矩形鋼,鋼架整體采用Q345鋼材[6]。機器人結構如圖1所示。
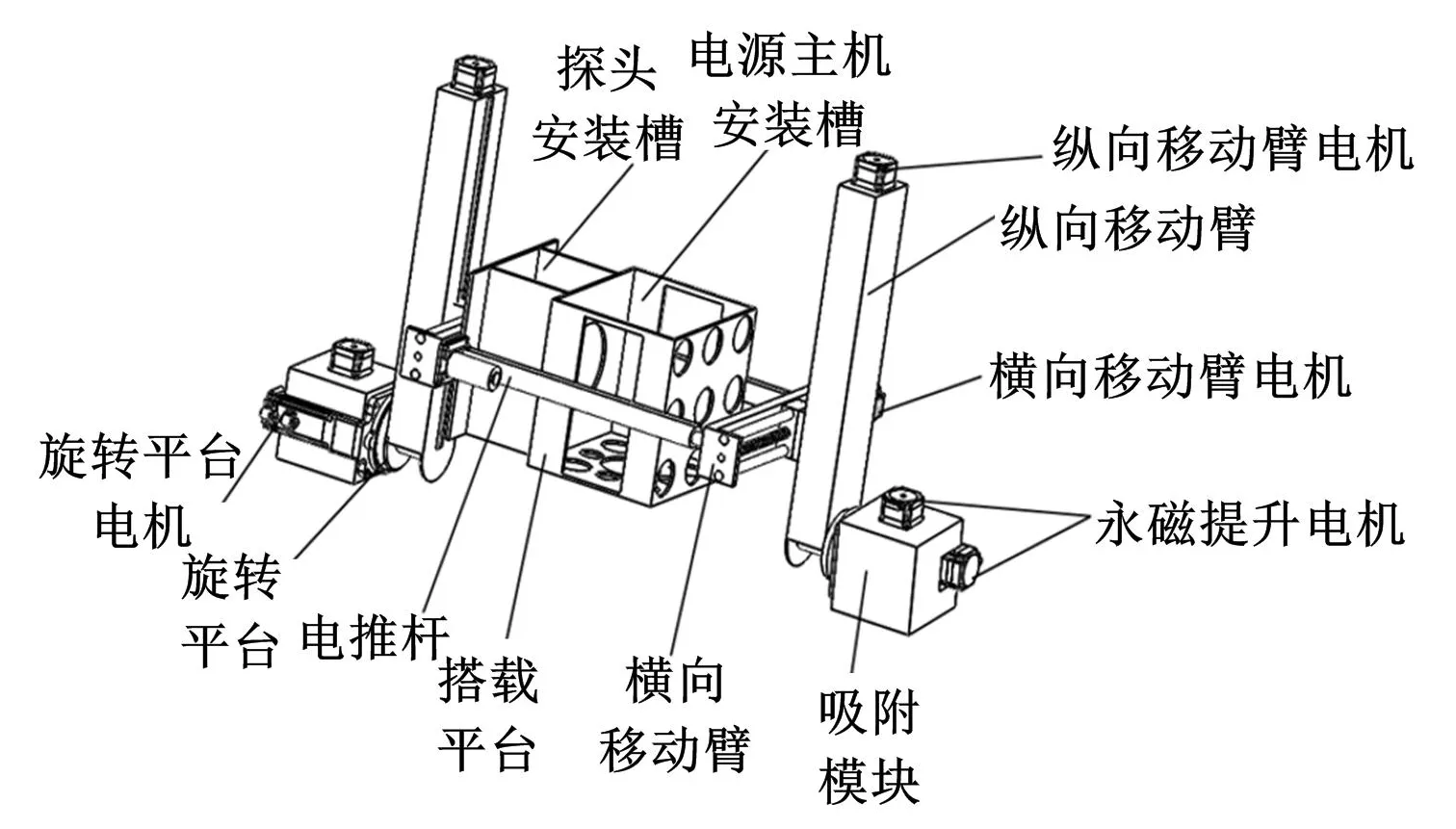
圖1 機器人結構示意圖Fig.1 Schematic diagram of robot structure
該機器人主要由吸附模塊、旋轉平臺、電推桿、搭載平臺、橫向移動臂、縱向移動臂等部件組成。整個機器人呈對稱布置。其攀爬動力源為搭載平臺兩側的電推桿。旋轉平臺的作用在于:①空間翻轉步態中為兩側縱向移動臂提供擺動輸出;②控制吸附模塊的吸附面朝向攀爬面。縱向移動臂用于越障步態與空間翻轉步態的姿態調節;橫向移動臂用于空間翻轉步態姿態調節以及正常攀爬步態偏移修正。
1.2 機器人三種步態
1.2.1 正常步態
機器人正常步態如圖2所示。初始時,兩足均處于吸附狀態,如圖2(a)所示;隨后,前吸附足停止吸附,并與搭載平臺共同運動至極限位置,如圖2(b)所示;接著,前吸附足吸附,后吸附足釋放,后吸附足回收至極限位置,如圖2(c)所示;如此往復循環,即實現整個攀爬過程。

圖2 機器人正常步態示意圖Fig.2 Schematic diagram of normal gait of robot
1.2.2 越障步態
當機器人臨近凸起的段與段或桿與桿之間的螺栓連接區域時,可以采用越障步態直接越過障礙。機器人越障步態如圖3所示。其運動過程如下。
①在縱向移動臂的作用下,搭載平臺被上舉到一定高度,如圖3(a)所示。
②前吸附足提升至可以越過障礙物的高度,如圖3(b)所示。
③在推桿推力的作用下,前吸附足向前移動并跨過障礙物,如圖3(c)所示。
④后吸附足與障礙物之間還存在一定的距離,需要采用正常攀爬步態進行攀爬過渡,直到后吸附足攀爬到合適的越障位置,如圖3(d)所示。
⑤后吸附足運動至合適的越障位置后,采用與前吸附足一樣的越障方式進行障礙,如圖3(e)所示。
⑥雙吸附足均吸附在攀爬面上,搭載平臺下放,完成整個越障過程,如圖3(f)所示。

圖3 機器人越障步態示意圖Fig.3 Schematic diagram of robot obstacle climbing gait
1.2.3 空間翻轉步態
當機器人攀爬至橫撐桿與主弦桿相連接處時,無法繼續進行直線攀爬,需要通過空間翻轉步態來越過阻礙。機器人空間翻轉步態如圖4所示。
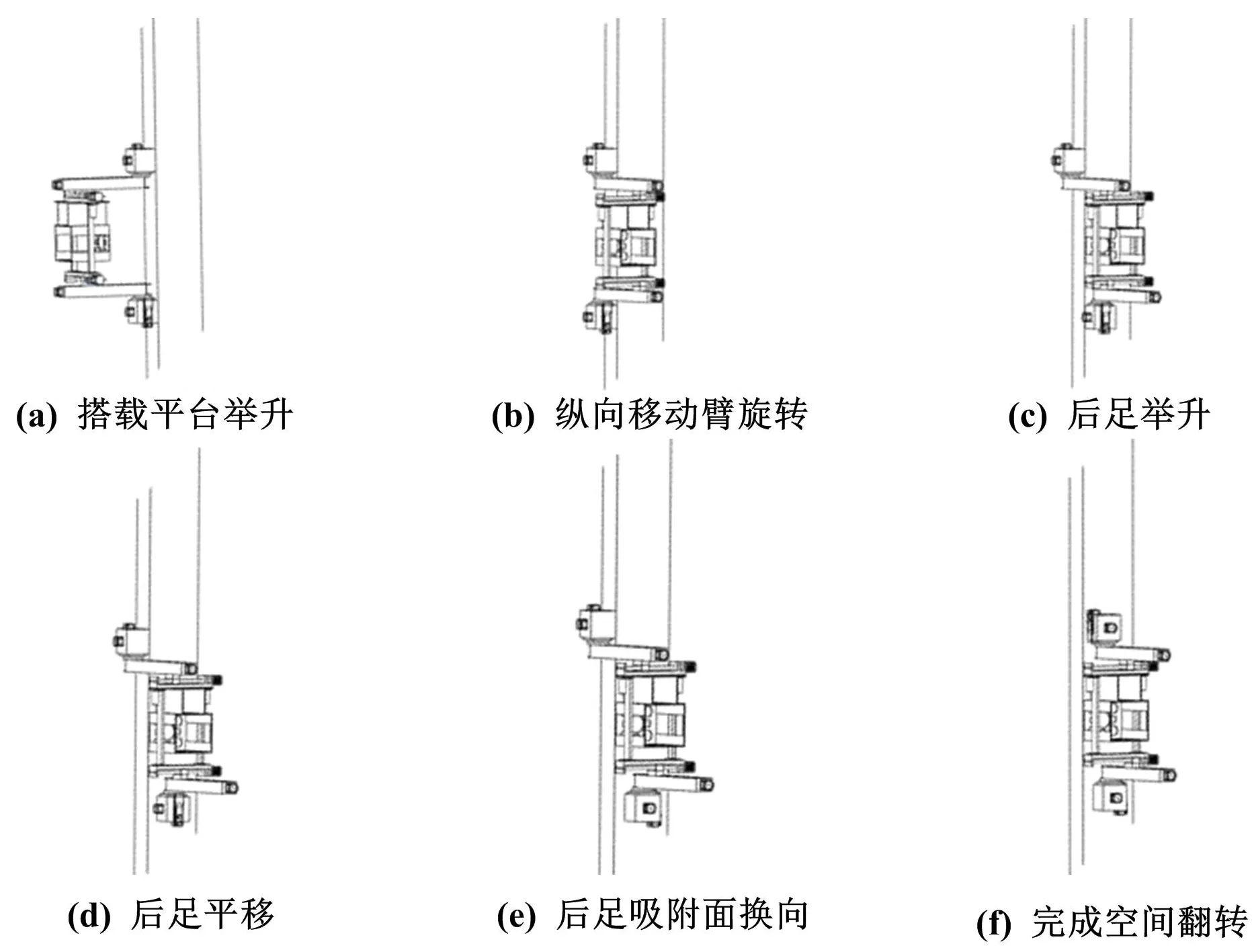
圖4 機器人空間翻轉步態示意圖Fig.4 Schematic diagram of the robot spatial flipping gait
機器人運動過程如下。
①搭載平臺在電機作用下沿縱向移動臂抬升至指定位置,如圖4(a)所示。
②首先,縱向移動臂在旋轉平臺的作用下帶動搭載平臺旋轉90°。然后,搭載平臺在絲桿導軌作用下,沿橫向移動臂移動,如圖4(b)所示。
③后吸附足在縱向移動臂的作用下進行抬升,離開原吸附面,如圖4(c)所示。
④在橫向移動臂的作用下,后吸附足模塊移動至新攀爬面的合適位置,如圖4(d)所示。
⑤在旋轉平臺的作用下,后吸附足吸附面旋轉至新攀爬面并吸附,如圖4(e)所示。
⑥前吸附足參照相同的流程完成換面吸附,至此完成換面攀爬,如圖4(f)所示。
2 靜力學分析
2.1 永磁體排布方式選擇
永磁體的數量、大小與布置形式在很大程度上影響著整個吸附模塊的性能。吸附模塊中永磁體的基本布置形式有環形布置、矩形布置與直線布置。采用環形布置的吸附模塊,其永磁體的形心位于同一個圓上,結構比較緊湊;采用矩形布置的吸附模塊在兩個正交方向的抗傾覆性能相差較大;采用直線布置的吸附模塊是單方向永磁體,形心都在一條直線上,當機器人進行側面翻轉換向時,發生傾覆的可能性最大。因此,本文所設計的攀爬機器人的吸附模塊中永磁體采用環形布置。典型的環形布置如圖5所示[7]。

圖5 典型的環形布置示意圖Fig.5 Typical annular arrangement
在確定的吸附支撐狀態下,攀爬機構吸附模塊的抗傾覆承載能力為[8]:
(1)
式中:FS為磁體的吸附力;R0i為向量R0的元素,i=1,2,...,n,n為R0的元素個數。
R0=A-1Q0
(2)
式中:矩陣A為與工作磁塊位置(xi,yi)有關的矩陣,n×n;Q0為單位載荷向量,n×1;R0為n×1的向量。
通過MATLAB求解得到的單位圓下單位力抗傾覆能力求解結果如表1所示。

表1 單位圓下單位力抗傾覆能力求解結果Tab.1 Solution results of anti-overturning capacity of unit force under unit circle
由計算結果可以看出,采用六邊形布置的抗傾覆能力明顯大于其他幾種形式。但考慮到加工成本、吸附模塊大小和能耗問題,擬采用4個吸附磁塊,經過比較最終采用正方形布置。
2.2 抗滑移力學分析
在整個攀爬過程中,當前足或后足進行單一吸附時,即機器人在蠕動前進的過程中,發生滑移的可能性最大。因為整體結構的對稱性,無論是前足吸附還是后足吸附,吸附模塊提供的吸附力所產生的摩擦力克服的重力是相同的。對后足吸附、前足釋放的狀態進行力學分析。單足吸附時機器人受力情況如圖6所示。
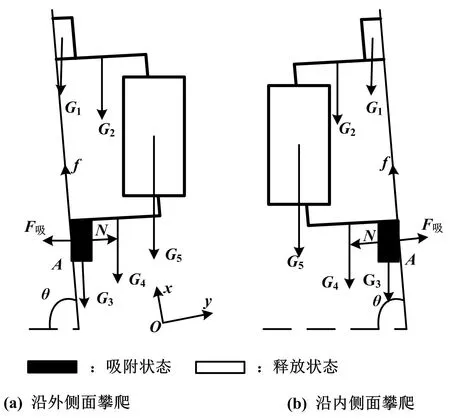
圖6 單足吸附時機器人受力情況Fig.6 Force of robot during single foot absorption
若機器人不發生滑移,則有:
(3)
如圖6(a)所示,當機器人沿外側面攀爬時,有:
(4)
如圖6所示,當機器人沿內側面攀爬時,有:
(5)
式中:G1為前吸附足重力大小;G2為前縱向移動臂重力大小;G3為后吸附足重力大小;G4為后縱向移動臂重力大小;G5為搭載平臺與搭載物體重力大小;F吸為后足吸附力大小;N為攀爬面對機器的支撐力大小;f為后足與攀爬面之間的摩擦力大小。
2.3 抗傾覆力學分析
發生傾覆的可能性最大的情況也是單足吸附。在單足吸附時有兩種空間姿態容易發生傾覆。其一是攀爬過程中前足釋放、后足吸附。此種情況容易使機器人在自身重力作用下繞其后吸附足下端線發生傾覆。其二是機器人在進行空間翻供過程中,繞其后吸附足中的永磁體發生旋轉傾覆。下面對這兩種情況分別進行受力分析。
情況一力矩分析簡圖如圖7所示。情況一:圖7(a)情況發生傾覆的可能性最大,且機器人整體將繞坐標系z軸產生旋轉趨勢。若發生傾覆,則必須先將吸附足中的上排永磁體掀起。其受力簡圖如圖7(b)所示。

圖7 情況一力矩分析簡圖Fig.7 Schematic diagram of torque analysis for Case 1
為使機器人不繞坐標軸z發生傾覆,則需:
(6)
式中:L1為后縱向移動臂重心到攀爬面的距離;H為后吸附足模塊高度;L2為搭載平臺與搭載物體的重心到攀爬面的距離;L3為吸附足中上排永磁體吸附中心到吸附足模塊最底端的距離;L4為上部分重心到吸附足上端線的距離;G=G1+G2+G5
情況二:若機器人在進行空間翻轉時,其后吸附足中的永磁塊發生旋轉傾覆,最大的可能性是機器人在垂直位置上繞吸附足中左側某一永磁體發生旋轉。因為排列特殊性,上下平衡式相同,以左側上的永磁體中心為原點建立坐標系。情況二力矩分析如圖8所示。

圖8 情況二力矩分析簡圖Fig.8 Schematic diagram of torque analysis for Case 2
要若使機器人整體不繞坐標軸y發生旋轉,則有:
f(2l1+l2)-G4L1-Gl3=0
(7)
式中:f為摩擦力f1、f2、f3的大小;l1為永磁體的中心距;l2為對角兩個永磁體的中心距離;l3為搭載平臺與搭載物體的重心到原點O的距離。
尺寸參數:L1=357.5 mm,L2=435 mm,L3=170 mm,L4=524 mm,l1=140 mm,l2=198 mm,l3=535 mm,H=200 mm。
重力參數:G1=78.40 N,G2=37.24 N,G3=78.40 N,G4=37.34 N,G5=238.14 N。
通過式(4)~式(7)所列出的平衡式,取靜摩擦系數μ=0.85,最終得到機器人不發生滑移與傾覆所需的最小吸附力為2 242.30 N。
3 機器人運動學分析
3.1 D-H參數坐標
將所設計的機器人視為一個連桿機構。該機構共有8個連桿、2個旋轉關節和5個移動關節。為方便建立坐標系,將其等效簡化為連桿結構圖,取初始狀態為:縱向移動臂滑塊處于縱向移動臂底部,橫向移動臂滑塊處于中部,且兩吸附足處于同一軸線上。以一端吸附足的中心為基座標,建立坐標系。等效連桿坐標系如圖9所示。進一步由圖9可以得到D-H參數表,如表2所示。

圖9 等效連桿坐標系Fig.9 Equivalent linkage coordinate system
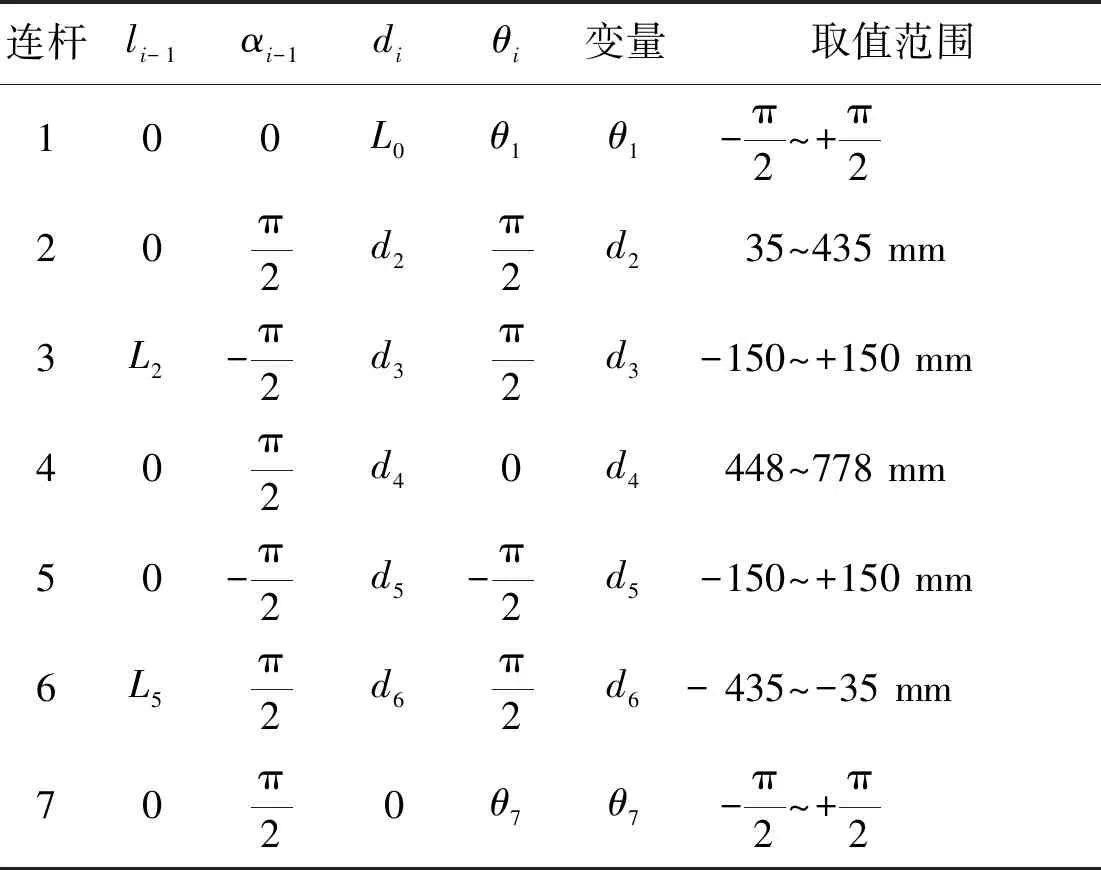
表2 D-H參數表Tab.2 D-H parameter table
3.2 正運動學求解
改進D-H法中,連桿變換可以通過4個基本坐標變換得到。其中,每個基本坐標變換只依賴于一個連桿參數,可以通過下面四個基本坐標變換依次得到。
①Oi-1坐標系繞xi-1軸旋轉ai-1。
②Oi-1坐標系沿xi-1軸移動ll-1。
③Oi-1坐標系沿zi軸旋轉θi。
④Oi-1坐標系繞zi軸轉動di。
則從Oi坐標系到Oi-1坐標系的變化矩陣為:
(8)
基于此,坐標系{n}相對于{0}的齊次變換可表示為幾個相鄰齊次變換連乘的形式:
(9)
3.3 逆運動學求解
逆運動學是指在末端位置確定的情況下求出關節變量的變化大小。逆運動學的解比較復雜,即使處于同一個位置和方位的末端也可能存在多個解,甚至當末端處于某些特殊位置時還會出現無解的情況[9]。在已知末端位姿變換矩陣的情況下,求解其關節變量的值的過程稱之為運動學反解。根據矩陣相乘原理,有:
(10)
代入相關矩陣,求解得到:
(11)

將式(11)代入正運動學求得的位姿變換矩陣(1,1),可求得:
(12)
(13)

(14)
由矩陣元素(3,4)相等,可得:
pxsinθ1-pycosθ1-d2=d6
(15)
結合式(14)中左右矩陣(2,4)元素相等可以看出,d2和d6之和是一個固定值,但二者的解卻不唯一。同理,結合式(5)~式(12)中左右矩陣(1,4)元素相等,可以看出d5和d3之和也是一個固定值,即d5+d3=-pxcosθ1-pysinθ1,但二者的解也不唯一。因此,不再對d5和d3進一步求解。
4 機器人的運動空間分析
分析機器人的運動空間是機器人研究設計過程中的一個重要步驟,同時運動空間也能用于評價機器人是否具有靈活的姿態。運動空間通常被視為關節空間變量與運動空間的映射,表示為:
W(P)={P(q):q∈Q} ?R3
(16)
式中:W(P)為運動空間;P(q):q(G)為運動學正解的位置分量;q為廣義關節變量;R3為三維空間。
現在求解機器人的運動空間的方法總體上分為三種:解析法、圖解法以及數值法。解析法通過反復包絡求取空間邊界曲線,可以采用函數精確地表達出空間邊界,但其表達式復雜,因此多適用于關節數≤3的機器人。圖解法以幾何圖形繪制的方式求取空間邊界,其優勢在于直觀性較強,但處理多關節機器人時需要進行特殊的分組處理。數值法利用計算機的計算與圖形處理能力求取機器人空間邊界曲面上的特征點,進而構成邊界曲線,繪制出邊界曲面。其缺點是計算量較大。但隨著計算機技術的飛速發展,該方法在求取運動空間方面的優勢愈發突出[10]。本文采用數值法中的蒙特卡洛法進行機器人的運動空間求解。蒙特卡洛法的原理如式(16)所示,其實質在于對關節變量采用均勻分布進行隨機組合,即給予一定數量的符合關節變化范圍要求的隨機量,再利用正運動學求解的結果計算出末端坐標值。這些坐標值所在的范圍區間近似地模擬了機器人末端的運動空間。換而言之,隨機變量取得越多,越能模擬出實際的運動空間。主要步驟如下。
①根據正運動學所求得的結果,確定末端相對于固定坐標系的位置向量。
②采用均勻分布在各個關節變量的變化范圍內取個數相同的隨機值,方法如下:
θi=θimin+(θi max-θi min)×Rand(N,1)
(17)
式中:θi min、θi max分別為關節i最小、最大變化量。
③將隨機值數組代入式(8),確定末端相對于固定坐標系的位置向量,得到隨機變量到運動空間的映射。所構成的圖形即為運動空間云圖。
將整體機器人視為機械臂,在不考慮井架干涉的情況下,采用MATLAB對機器人一足吸附、一足固定狀態下的前足運動空間進行了求解。蒙特卡洛法求解結果云圖如圖10所示。

圖10 蒙特卡洛法求解結果云圖Fig.10 Monte Carlo method to solve the results of cloud map
由圖10可以看出,機器人前足活動三維空間為一個圓柱體,x、y、z方向的范圍區間分別為(-350,+350)、(-400,+400)、(672,1 002)。其范圍區間大于攀爬對象尺寸,因此所設計的機器人能夠靈活地規避障礙。由于所設計的機器人結構的特殊性,后足的立足點在x和y方向是與前足相吻合的;而搭載平臺的運動空間是通過機器人雙足立足點不斷更新確定組成的。在實際攀爬過程中,d2與d3不能同時進行變動。為研究搭載平臺活動空間,以搭載平臺中心為末端坐標,并在d2取最大值時研究搭載平臺轉動空間,以及在d2取0時研究搭載平臺平動空間。搭載平臺轉動空間和搭載平臺平動空間分別如圖11、圖12所示。

圖11 搭載平臺轉動空間Fig.11 Carrying platform rotation space
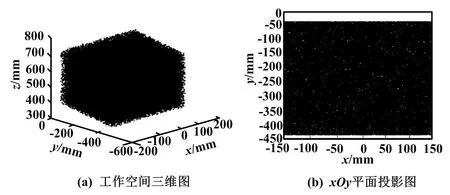
圖12 搭載平臺平動空間Fig.12 Carrying platform rotation space
如圖11、圖12所示,搭載平臺的轉動空間為弧形,半徑為480 mm左右,遠大于攀爬平面寬度,能夠順利實現擺動換面操作。平動空間為立方體,體積為400 mm×200 mm×700 mm,活動空間較大,能夠實現較大范圍的檢測操作。
5 結論
本文以JJ225/45-K井架為攀爬對象,提出了一種井架攀爬機器人的結構。該機器人能夠攜帶檢測設備儀器對井架主立柱進行探傷。對機器人步態進行了闡述,完成了靜力學平衡公式推導,并通過D-H參數法完成了機器人正運動學、逆運動學的求解,最后利用蒙特卡洛法在MATLAB中完成了對機器人的運動空間求解。研究結果表明,所設計的機器人能夠靈活避障和實現空間翻轉。所設計的攀爬機器人并不局限于石油井架的攀爬,可進一步根據攀爬對象的尺寸參數調節攀爬機器人的尺寸參數,進而實現多種環境下的探傷操作。
