基于MATLAB 的多連桿壓力機桿系設計系統(tǒng)研究
2022-01-17 04:22:20黃建民夏德琛
鍛壓裝備與制造技術 2021年6期
關鍵詞:設計
黃建民,仲 君,夏德琛
(揚力集團股份有限公司,江蘇 揚州 225104)
多連桿壓力機工作可靠,性能優(yōu)良,滑塊工作速度低且平穩(wěn),能很好地滿足板料拉延成形工藝要求。因此在拉伸加工領域,多連桿壓力機應用廣泛,通過配置傳動桿系,可以靈活實現(xiàn)多種設計要求。通常這些設計要求可以歸納為以下三種問題:①滿足預定的運動規(guī)律要求;②滿足預定的連桿位置要求;③滿足預定的軌跡位置要求[1]。以往為滿足設計要求通常都是采用函數(shù)逼近法,但計算復雜,并當機構的設計參數(shù)較少時,逼近精度不高。若采用最優(yōu)化方法對機構進行設計,解析目標函數(shù)趨勢,結(jié)果精度高,但需進行大量的數(shù)學運算,一般需借助電子計算機來完成[2]。隨著計算機輔助數(shù)值解法的發(fā)展,特別是MATLAB 軟件的引入,解析綜合法已經(jīng)得到了廣泛的應用[3]。MATLAB 是Mathworks 公司于1982 年推出的一套功能強大的工程計算軟件。廣泛應用于自動控制、機械設計、流體力學和數(shù)理統(tǒng)計等工程領域,被譽為巨人肩上的工具。工程人員通過使用MATLAB 提供的工具箱,可以高效求解復雜的工程問題[4]。本文主要闡述多連桿機構設計的思路與方法,包括建立機構數(shù)學模型,使用MATLAB 優(yōu)化工具箱,編寫設計系統(tǒng),計算所求桿長度,使壓力機滑塊在多個約束條件下滿足預定運動軌跡。
1 建立機構原理模型
圖1 為該壓力機的桿系機構簡圖,其中,P1為曲軸中心點,P2為曲柄L2與連桿L3連接點,P3為連桿L3與搖桿連接點,P4為搖桿與機身連接點,P5為搖桿與短連桿L6連接點,P6為短連桿L6與滑塊連接點。搖桿前段為L5,搖桿后段為L4,搖桿與水平方向夾角為θ4,P1與P4為機身上的兩點連接線長度L1,其與水平方向夾角為θ1。曲柄L2與水平線夾角為θ2,連桿L3與水平線夾角為θ3。搖桿后段L4與連桿L3夾角為θ5,搖桿前段L5與短連桿L6夾角為θ6,短連桿與垂直方向夾角為θ7。

圖1 機構原理圖
該多連桿為增行程機構,相比普通曲柄壓力機,在體身尺寸不變的情況下,可以用較小的曲柄偏心獲得更大的行程。壓力機要求滑塊行程220mm,滑塊距下死點90mm 時需能承受300kN 的力,滑塊距下死點60mm 時搖桿處于平行狀態(tài)。根據(jù)機身結(jié)構配置的限制,有部分參數(shù)已給出,以曲軸頸中心點P1為原點,建立笛卡爾坐標系,設各點Pn 的橫縱坐標為(Xn,Yn),滑塊中心P6橫坐標X6=-550,機身點P4橫坐標X4=250。搖桿總長為800mm 即L5+L4=800mm,曲柄長為55mm。其中機架間距L1連桿L3,搖桿后段L4均為設計變量,需要通過合理設計L1,L3與L4的長度來達到設計要求。
本案例采用MATLAB 提供的優(yōu)化工具箱中“函數(shù)模塊fmincon”來實現(xiàn)三個未知桿長的設計。該函數(shù)模塊fmincon 需建立目標函數(shù)方程及約束函數(shù)方程,兩種函數(shù)方程可以是線性與非線性的等式或不等式[5]。本案例中,目標函數(shù)為符合預定桿系軌跡德的最小化方程,約束函數(shù)為條件不等式組成的矩陣。
1.1 桿系位置方程組
分析圖1 可知,該機構由兩部分構成:曲柄L2,連桿L3和搖桿后段L4構成曲柄搖桿機構。搖桿(L4+L5),短連桿L6和滑塊P6構成擺動滑塊機構。為設計合理桿長滿足要求滑塊運動軌跡要求,需要建立所求桿與滑塊位置的關系方程。搖桿為曲柄搖桿機構的輸出桿,也是擺桿滑塊機構的輸入桿,這樣可先解析曲柄搖桿,得出搖桿位置狀態(tài),再代入擺動滑塊機構求解滑塊位置。如圖一建立坐標系,以曲軸中心為原點,按桿組法建立方程。
曲柄搖桿機構位置方程為:

轉(zhuǎn)化為非線性超越方程:
擺動滑塊機構位置方程為:

其中(x6,y6)為P6點坐標,x6=-550,L4+L5=800,L6=250,當曲柄位置方程(2)被解出后θ4也為已知,代入(2)求得θ7和y6。
壓力機持續(xù)工作時,曲柄轉(zhuǎn)角作360°圓周運動,滑塊y 方向坐標(y6)隨曲柄角度變化而變化,為滿足行程220mm 的要求:

1.2 目標函數(shù)
本案例中,建立目標函數(shù)的最小化求解問題,計算最優(yōu)解L1,L3取得理想P5點與實際P5點距離的平方差最小值。

其中(x5r,y5r)為滑塊中心P5距下死點90mm 時桿系的實際位置,(x5i,y5i)為滑塊中心距下死點90mm 時搖桿水平應有的位置。
1.3 約束條件方程組
該機構的約束條件分為邊界約束以及功能約束。其中邊界約束包含桿長限制約束,曲柄搖桿機構構成條件的約束,功能約束包括滑塊行程約束,搖桿擺動角范圍的約束和曲軸可承受扭矩的約束。本案例中程序利用L4作循環(huán)語句來求得符合行程的L4,因此不建立滑塊行程約束方程。
1.3.1 曲柄搖桿的構成條件
根據(jù)機械原理中四桿機構的分析,列出不等式:
L1≥L2,L3≥L2,L1+L2≤L3+L4,L3+L2≤L1+L4,L4+L2≤L1+L3,
以上為曲柄搖桿存在的基本條件,L4與L2為已知不需要列函數(shù)方程。對應約束函數(shù)為:
g1(X)=L2-X1
g2(X)=L2-X2
g3(X)=L2+X2-X1-L4
g4(X)=L2+X1-X2-L4
g5(X)=L4+L2-X1-X2
1.3.2 搖桿的擺動角約束
如圖1,在滑塊受力時,桿系受力有θ5和θ6兩個壓力角,為同時限定兩個壓力角大小,搖桿的擺動角度θ4需在155°~190°之間。當L2與L3共線時可取搖桿擺動角度的最大及最小值,現(xiàn)以該條件建立方程不等式:

對應約束函數(shù)為:

1.3.3 滿足曲軸強度要求扭矩
壓力機在滑塊距下死點90°時開始拉伸,拉伸力F 為300kN。如圖2 所示,此時滑塊所受的拉伸力經(jīng)桿系傳到至曲軸上,分析曲軸受力可發(fā)現(xiàn)曲軸即受彎矩也受扭矩曲軸[1]。本案例壓力機用以深拉伸,受力工作行程大,工作時曲柄轉(zhuǎn)角距下死點角度很大,因此主要約束曲軸所受扭矩小于曲軸許用扭矩[τ]=40000Nm。壓力機工作時,曲軸扭矩Ttotal一般由理論扭矩Ti和摩擦扭矩Tf組成。理論扭矩即為滑塊受力傳遞至曲軸形成,摩擦扭矩由驅(qū)動壓力機各配合摩擦阻力形成[6]。


圖2 桿系受力傳遞
2 MATLAB 程序的實現(xiàn)
桿系長度未知的情況下,本案例滑塊行程表與曲柄轉(zhuǎn)角的對應關系并不確定,因此無論是目標函數(shù)還是約束函數(shù)都需要對整個機構位置進行解析計算后才能求解,桿系的兩組位置方程組為非線性超越方程,MATLAB 優(yōu)化工具集中另一個“函數(shù)模塊fsolve”可以求解此類問題。
2.1 建立目標函數(shù)程序
首先名為targetfun.m 的目標函數(shù)文件,設定初始條件:

建立搖桿后段的循環(huán)語句,計算出合適的L4長度使得滑塊行程為220:

建立曲柄轉(zhuǎn)角θ2共360°的循環(huán)語句,步長0.5°,調(diào)用fsolve 工具解析每一步桿系機構位置狀態(tài):


確定上死點,下死點,行程60 的曲柄轉(zhuǎn)角:

最后建立最小化的目標方程:

2.2 建立約束函數(shù)
建立名為confun 的約束方程模塊,根據(jù)式(6)~(9),設定初始條件:

建立搖桿后段的循環(huán)語句,計算出合適的L4長度使得滑塊行程為220:


建立曲柄轉(zhuǎn)角θ2共360°的循環(huán)語句,步長0.5°,調(diào)用fsolve 模塊解析每一步桿系機構位置狀態(tài):

確定上死點,下死點,行程90 的曲柄轉(zhuǎn)角:


列出曲軸存在邊界條件:
g(1)=-x(1)+L2;
g(2)=-x(2)+L2;
g(3)=x(1)+L2-x(2)-L4;
g(4)=-x(1)+L2+x(2)-L4;
g(5)=-x(1)+L2-x(2)+L4;
搖桿轉(zhuǎn)角約束:
g(6)=-(pi-acos((L1^2-(L3+L2)^2+L4^2)/(2*L1*L4))+th1)+(155/360*2*pi);
g(7)=pi-acos((L1^2-(L3-L2)^2+L4^2)/(2*L1*L4))+th1-(190/360*2*pi);
最大扭矩限制約束:
g(8)=fttotal-40000;
“哦……”兩個人見我如此誠懇,一時間不知說什么好。尷尬了一會兒,服務員趕緊從腰里摸出《收銀票據(jù)》遞給我。我摘下眼鏡一看,果然是我消費的內(nèi)容,價格是43元,而且票據(jù)上還手工寫著兩個字:“未付”。
2.3 構建位置狀態(tài)模塊
調(diào)用“fsolve 模塊”結(jié)合使用桿系的狀態(tài)方程,根據(jù)式(2)建立名為“fourbarposition”的解析模塊:
function t=fourbarposition(th,th2,L2,L3,L4,L1,th1)
t=[L2*cos(th2)+L3*cos(th(1))-L4*cos(th(2))-L1*cos(th1);
L2*sin(th2)+L3*sin(th(1))-L4*sin(th(2))-L1*sin(th1)];
3 本方案實例
3.1 設計系統(tǒng)實際使用
本案例中給定連桿和機架長度初始條件為連桿長度700mm,機架距離600mm,其他條件已知。
在計算程序中輸入指令。輸入初始連桿長度,初始機架長度:x0=[650,700];連桿機架長度的下限約束:lb=[550,500];連桿機架長度的上限約束:ub=[700,700]。
同時,設置函數(shù)選項,變量,目標函數(shù),條件函數(shù)的調(diào)節(jié)參數(shù):
options=optimset(“algorithm”,“active-set”,“display”,“off”,“TolFun”,0.001,“TolX”,0.001,“TolCon”,0.001);
圖3 為初始桿系與設計后桿曲柄轉(zhuǎn)角與滑塊行程的對比圖,兩條曲線軌跡十分接近。可見在行程一定的情況下,本案例所求兩桿的長度變化對曲柄轉(zhuǎn)角與滑塊行程關系影響不大。由于其偏置的特性,下死點時曲柄轉(zhuǎn)角都大于180°。圖4 為初始桿系與設計后桿系滑塊行程與搖桿擺角對比圖,其中0 位為下死點位置,可以發(fā)現(xiàn)計算后的桿系的搖桿擺角在距下死點60mm 行程時接近180°,符合設計要求,且相比初始桿系,搖桿在工作行程內(nèi)更加接近水平線。

圖3 曲柄轉(zhuǎn)角與滑塊行程對比

圖4 滑塊行程與搖桿擺角對比
3.2 設計生產(chǎn)應用
將計算結(jié)果應用到設計環(huán)節(jié)中,并生產(chǎn)出對應的樣機,如圖5。并隨之測試各方面性能,對比初始計算目標。首先,完成任務目標,即建立桿系傳動系統(tǒng),保證樣機的傳動系統(tǒng)很大的工作行程下承受足夠的扭矩;其次,為限制機床整體尺寸大小,桿系長度保證在滿足設計目標情況下縮小長度,在設計系統(tǒng)中限制相關參數(shù),并將結(jié)構排至緊湊,如圖6 所示;最后,對于專用機床,性能參數(shù)根據(jù)整體而確定,因此生產(chǎn)量不大,合理利用設計系統(tǒng),搭建成熟的平臺,同類型的機床小幅修改桿系長度以達成要求。

圖5 多連桿樣機
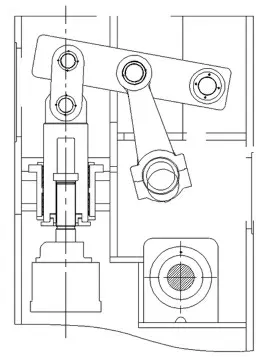
圖6 樣機傳動簡圖
4 結(jié)論
多連桿壓力機桿系設計往往比較復雜,除了要滿足桿系預定軌跡要求外還考慮壓力機實際功能的設計要求。本案例使用基于MATLAB 的設計系統(tǒng)實現(xiàn)桿系設計,其計算結(jié)果體現(xiàn)MATLAB 的一大優(yōu)勢在于數(shù)據(jù)處理運算非常方便,在優(yōu)化設計時建立數(shù)學模型,調(diào)用多樣的函數(shù)工具集進行分析計算,過程中產(chǎn)生的計算數(shù)據(jù)便于性能分析或圖表繪制,并產(chǎn)生結(jié)果應用到實際設計生產(chǎn)過程中去。本案例方法具有進一步發(fā)展的潛力,通過建立不同的目標函數(shù)方程,還可以實現(xiàn)桿系總體重量最小化設計等設計要求。有些多連桿壓力機要求擁有特殊的滑塊軌跡或運行曲線,通過對位置方程的求導,得到速度方程或者加速度方程,可以將滑塊速度或加速度加入數(shù)學模型中。這樣用類似的解析方法也能對此類型的多連桿壓力機進行桿系設計。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
