科學家開發流體力學驅動的機器人,無機械加工可節約高昂機器成本
2022-01-11 07:44:24
海外星云 2021年23期
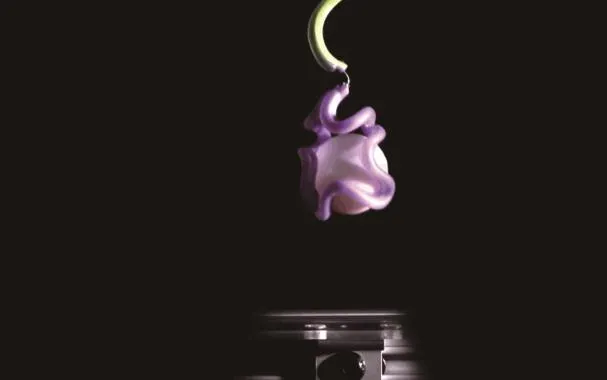
這是一只可輕輕拿起水果的星形“手指”。

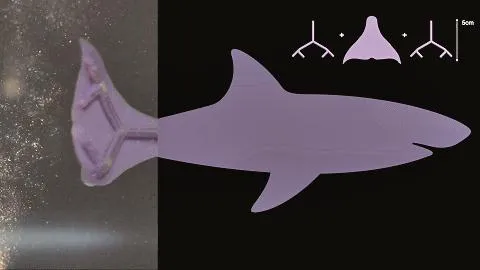
這是一條正在翻轉尾巴的小魚。
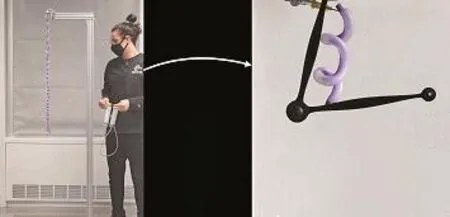
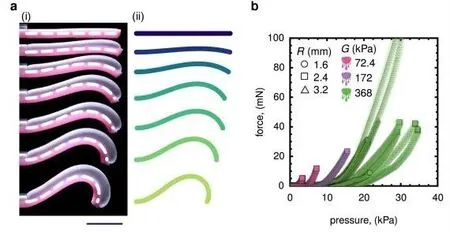
這是一根根彎曲的“手指”,就像彈鋼琴一樣。
它們外觀不同,但卻使用了同一技術——“花式氣球”泡泡鑄造法。相關論文以《泡泡鑄造軟機器人》為題發表。
此前軟體機器人:成本高昂、任務執行不夠完美

所有機器人都需要一個可引起運動的部件,也叫作執行器。剛性機器人是根據關節以固定方式進行移動,而軟體機器人在移動方式上,具有更多想象力。
軟體機器人,是由可延展材料制成的機器人。它可進入和繞行一般硬體機器人無法觸達的地方。設計時的最大困難在于控制拉伸方式和變形方式,這決定著它的移動方式。
盡管它的應用前景不錯,但目前許多軟體機器人的柔軟 “身體”卻不得不被剛性驅動器來驅動,任務執行的效果往往會讓任務實現的目標以及效果大打折扣 。
為構建更實用的軟體機器人,已有科研團隊開發出軟體驅動器,來讓機器人完全實現軟體化。但此前要想實現這一目的,通常需要3D打印機、或激光切割機等昂貴設備。
而文章開頭去動圖中的軟體機器人,搭載了科學家最新發明的新技術——“花式氣球”泡泡鑄造法,上述難題也借此被攻克。
“花式氣球”啟發一篇《自然》封面論文
該研究由普林斯頓大學化學與生物工程系的團隊完成,這是一種使用“花式氣球”法來制造軟體機器人的新方法。在充氣時,氣球能以可預測的方式改變自身形狀。
以可握住水果的軟體手指為例,這是能像肌肉一樣收縮的手指,當給它施加空氣時還可以單獨彎曲。


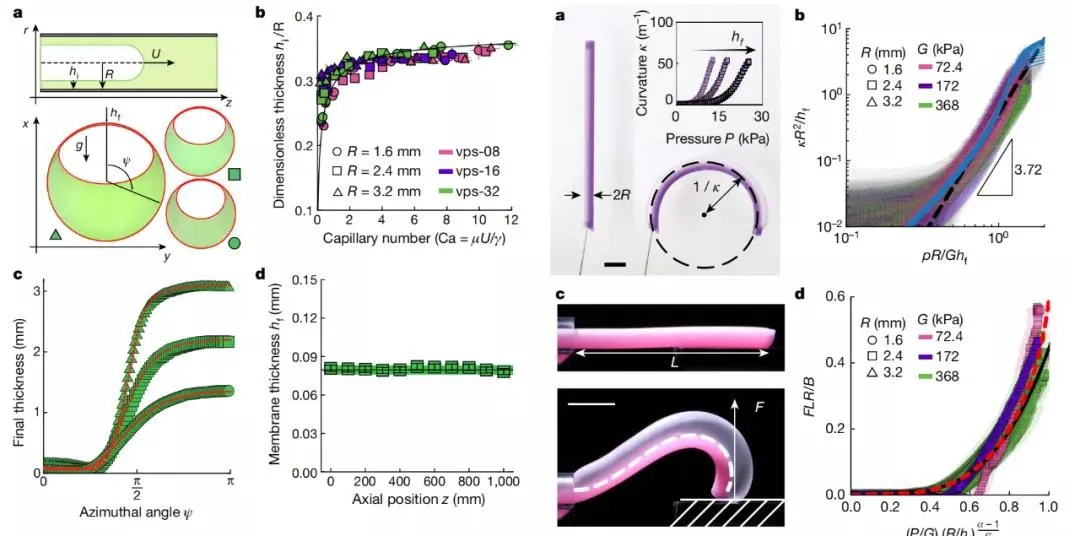
研究中,將氣泡注入液態聚合物、也就是橡膠之中,以便在模具的整個長度上形成一個長氣泡。一旦聚合物凝固,它就可以彎曲、移動和抓住東西。然后。隨著彈性體由于重力作用漸漸沉入到底部,氣泡則會慢慢上升到頂部。

然后向氣泡頂部周圍的薄膜充氣,隨著薄膜尺寸的增加,氣泡就會包裹在硬底部的周圍。也就是說隨著氣泡上升,一層彈性體薄膜便留在其上方,但大部分液態彈性體最終會落入下方。
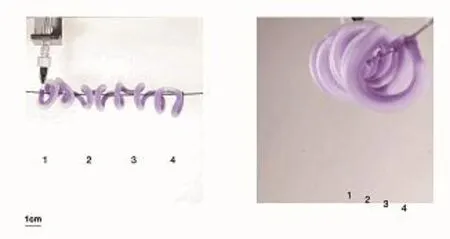
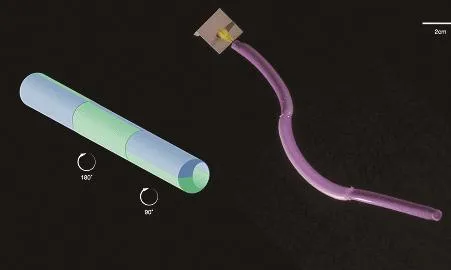
具體來說,泡泡鑄造技術利用了流體的物理特性。在制造過程中,使用管狀物或螺旋狀物作為模具,將空氣泵入液態聚合物中就可產生氣泡,當聚合物凝固時,氣泡則會漂浮到頂部。一旦這些彈性體硬化,就可將其從模具中取出、并向其充氣。其中貼近氣泡一側的薄面,會在較厚的底座上拉伸并卷曲。
當液態聚合物被注入到模具中,模具的形狀可以十分簡單比如管狀,也可以十分復雜,比如螺旋狀物或其他更復雜的形狀。
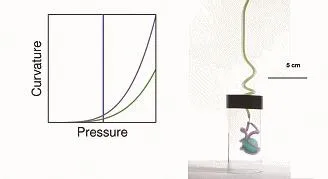
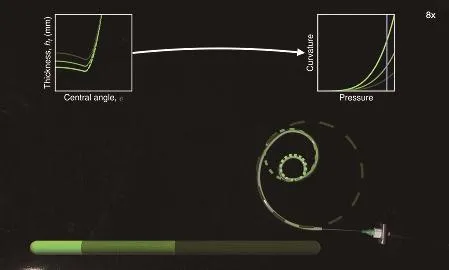
如果在液體聚合物固化前留有更多的時間,最終形成的頂部薄膜可以更薄。薄膜越薄,在給它充氣時就能拉伸得越多,進而可形成更大的整體彎曲。
通過控制相關因素,例如涂在模具上的彈性體的厚度、彈性體沉降到底部的速度、以及液態聚合物固化所需的時間等,即可控制所生產出來的致動器將如何移動。也就是說,這一移動取決于流體力學。
另外該系統也是可擴展的,它既能生產出幾米長的執行器,也可以生產出薄至100微米,幾乎和人的頭發一樣細的執行器。
并且,執行器在充氣時會變形。相比之下,其他軟體機器人系統則通常會使用磁場、電場、溫度或濕度變化來讓執行器產生變形。

在該工作中,該團隊把大量時間花在弄清楚機器人充氣后的行為方式,為的是設計出具有特定運動特征的軟體驅動器,以及能用一種任何人都能學會的簡單方程來預測會接下來將會發生什么。
特別值得注意的是,研究中出現的薄膜,可以優化偏心空隙拓撲結構,在彎曲系數方面也強于多數充氣執行器。
泡泡鑄造的一個主要優點在于其成本優勢,它不需要3D打印機、激光切割機或其他通常用于軟體機器人生產所需的價格昂貴的工具。除了空氣之外,這些軟體機器人還可通過磁性、電流或溫度和濕度的變化來激活。
這些新功能將在軟物質通信系統中產生較大反響,可讓下一代機器人材料更容易移動,并可以與環境交互,同時又能讓其復雜性保持在易處理的水平。
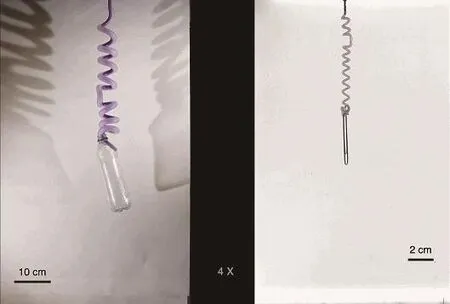
不過,這種制造方法仍有需要克服的挑戰,例如需要防止設備充氣過度時、以避免發生爆裂。目前,泡泡鑄造只在幾米高的彈性體填充管中取得了成功,過度膨脹會導致它爆裂,一旦失敗結局將是災難性的。
研究人員表示,泡泡鑄造是一種無粘合的制造方法,它依賴于流體流動、而非內部模板來構建空隙。與機械部件相比,這種對連續介質機械的依賴,使得各種尺寸的軟氣動執行器的無缺陷制造、以及之前不可能實現的長寬比成為可能。
整體來說,泡泡鑄造技術提供了一種簡單、靈活的方法,即使用流體力學的基本規則,也就是使用流體物理學來給軟體機器人創建執行器。
美國西北大學應用物理專業博士生袁航表示,該研究將空氣注入到由液態向固態轉變過程中的彈性體,思路非常巧妙。此外,還可穩定制備出由氣壓驅動的各種柔性驅動元件。
美國波士頓大學工程學院博士楊溢分析稱,該研究的重點不在于所制作的軟體機器人本身,而在于制作方法。此方法不僅簡單,并且可實現常規方法很難實現的效果。傳統制作方法是模具澆筑,而該研究則利用流體力學的原理,設計了簡單且精確的制作方法去制作氣壓驅動的軟體機器構件。
袁航也認為,該方法不涉及復雜的制備過程,可由特定形狀模具、去大規模地制備各種柔性驅動元件。此外,這項研究也詳細闡述了彈性體截面形狀形成的機理。
未來將研發“千足蟲”機器人
傳統的硬體機器人雖然有很多用途,但它們由于堅硬的外殼,給人的印象總是不太溫和,功能也比較受限。
比如,有著堅硬外殼的機器人無法做到握住你的手、并帶著你移動,而且它們尤其不適合與柔軟的東西互動,例如西紅柿等。
相比之下,軟體機器人在這一領域大有用武之地,它們可能會用于收獲農產品、從傳送帶上抓取精致的物品,以及作為可穿戴運動緊身衣、或皮下設備的一部分來幫助心臟病患者。
研究人員希望通過對復雜執行器的組裝,并借助該方法的靈活性、魯棒性和預測性,可加速軟體機器人的開發,例如開發出長形、曲折或血管結構的各種軟體機器人,從而實現新功能。
概括來說,這種獨特的柔軟和生物運動的結合,使軟體機器人在各種創新應用中十分有吸引力。此外,在建模、計算和制造方面的最新技術推動下,軟體機器人的設計、編程和組裝也將迎來更多可能。

接下來,研究人員希望利用該方法進一步開發新的軟體機器人,比如可像千足蟲那樣、以連續的波一起移動的機器人,或者以類似于人類心臟一樣從單一壓力來源進行收縮和放松的機器人。
研究人員表示:“隨著在物理學層面對于該問題的了解越來越充分,我們認為是時候去真正探索機器人技術了。” (綜合整理報道)
