基于U-Net網(wǎng)絡和GF-6影像的尾礦庫空間范圍識別
2022-01-06 05:24:10張成業(yè)邢江河
自然資源遙感 2021年4期
關鍵詞:方法
張成業(yè), 邢江河, 李 軍, 桑 瀟
(1.中國礦業(yè)大學(北京)地球科學與測繪工程學院,北京 100083; 2.中國礦業(yè)大學(北京)煤炭資源與安全開采國家重點實驗室,北京 100083)
0 引言
尾礦庫是筑壩攔截或圍地構成的,用以存儲金屬或非金屬礦山經(jīng)選礦后排出尾礦或其他廢渣的場所,含有大量暫時無法處理的有用或有害成分,是礦山開采活動的必要基礎設施[1]。尾礦庫是一個具有高勢能的泥石流危險源,一旦潰壩可能會造成大量的人員傷亡、農(nóng)田村莊毀壞、環(huán)境嚴重污染。2019年,巴西Brumadinho鐵尾礦庫發(fā)生潰壩,造成超過250人死亡,11人失蹤,下游河水中的懸浮物質(zhì)和有毒化學元素急劇增加[2]。2020年,伊春鹿鳴礦業(yè)有限公司發(fā)生尾礦庫泄露事故,據(jù)生態(tài)環(huán)境部官方公布,該事故次生了我國近20 a來尾礦泄漏量最大、應急處置難度最大、后期生態(tài)環(huán)境治理修復任務異常艱巨的突發(fā)環(huán)境事件。
我國尾礦庫總量居世界第一,其中非法擴張、瞞報漏報、未批先建等現(xiàn)象仍然存在,成為不容忽視的重大安全隱患,對尾礦庫進一步實施有效的監(jiān)管手段顯得十分必要。然而,傳統(tǒng)的尾礦庫調(diào)查監(jiān)測主要依賴人工實地勘察獲取尾礦庫的位置信息和空間分布,這種方法耗時耗力、成本高且時效性差。
衛(wèi)星遙感以其大面積同步快速觀測的優(yōu)勢為尾礦庫的有效監(jiān)測提供了重要手段。現(xiàn)有研究提出的尾礦庫遙感空間范圍識別思路可以歸為3類: ①人機交互目視解譯的方法,如郝利娜等[3]對鄂東南尾礦庫開展了遙感特征分析與人機交互目視解譯工作,為在遙感影像上人工勾畫尾礦庫樣本提供了重要技術基礎; ②尾礦庫識別的指數(shù)模型方法,如Ma等[4]和Hao等[5]針對鐵尾礦庫在Landsat8 OLI影像上表現(xiàn)的特征提出指數(shù)模型,開展了尾礦庫目標的空間范圍識別,曹蘭杰等[6]分析了尾礦庫在國產(chǎn)高分一號影像中的特征,構建了相關的指數(shù)模型; ③計算機自動化解譯方法,如Fuentes等[7]、王立廷[8]、Orimoloye等[9]分別使用隨機森林、支持向量機和最大似然分類等方法,利用Landsat和Sentinel等中等分辨率多光譜遙感影像數(shù)據(jù)開展了尾礦庫空間范圍識別或礦區(qū)地物分類研究。上述方法為尾礦庫遙感識別提供了重要借鑒,但是尾礦庫遙感智能識別的發(fā)展仍然緩慢。近年來,利用深度學習對遙感圖像開展目標識別與提取越來越受到重視。閆凱等[10]、Li等[11]利用深度學習的單次多框檢測器網(wǎng)絡(single shot detector,SSD)模型對尾礦庫開展了目標檢測,對檢測出的尾礦庫目標進行標記,這為利用深度學習開展尾礦庫遙感空間范圍識別奠定了重要基礎。
為了進一步實現(xiàn)尾礦庫遙感空間范圍的準確識別,本研究基于國產(chǎn)高分六號(GF-6)影像,提出了基于深度學習U-Net網(wǎng)絡框架的尾礦庫空間范圍識別方法,并與隨機森林、支持向量機和最大似然分類等方法進行了對比驗證。
1 研究區(qū)概況與數(shù)據(jù)源
研究區(qū)主要位于云南省紅河哈尼族彝族自治州內(nèi),范圍在E102°41′56″~103°46′46″,N22°41′29″~23°38′16″之間,如圖1所示。研究區(qū)域包含完整的個舊市以及蒙自市、元陽縣、金平苗族瑤族傣族自治縣、屏邊苗族自治縣、建水縣等行政區(qū)的部分區(qū)域,合計面積共有約8 175.81 km2。研究區(qū)處于滇東南個舊-馬關都龍鎢錫銻多金屬基地。滇東南地區(qū)地質(zhì)構造復雜,有色金屬礦產(chǎn)資源豐富,除鎢錫銻之外還盛產(chǎn)鎳、鉛、銅和鋅等有色金屬礦產(chǎn)。僅個舊市錫的保有儲量就有90多萬t,占中國錫儲量的1/3,被譽為“中國錫都”[12]。為了堆放礦產(chǎn)資源開采過程中形成的大量廢渣和尾礦,研究區(qū)內(nèi)建造了大量尾礦庫[13]。
GF-6衛(wèi)星于2018年6月發(fā)射成功,搭載了2 m全色/8 m多光譜相機(panchromatic & multispectral scanners, PMS)和16 m多光譜寬幅相機(wide field of view, WFV)。本文采用的2 m全色/8 m多光譜的圖像參數(shù)如表1所示[14],成像時間為2019年2月6日。影像格式以及后續(xù)標注的圖像樣本均為TIFF格式。真彩色合成影像如圖1所示。

表1 GF-6衛(wèi)星全色/多光譜圖像的詳細參數(shù)Tab.1 The details of the panchromatic and multispectral images acquired by GF-6
2 研究方法
本文所采用的技術路線如圖2所示。
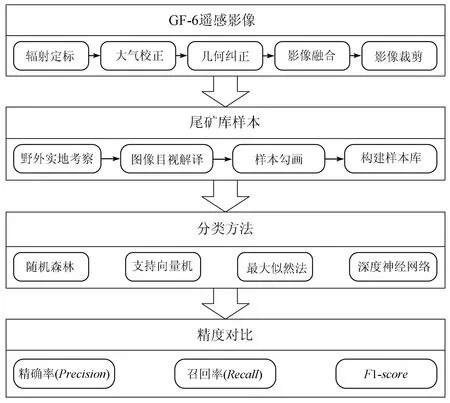
圖2 本文技術路線圖Fig.2 The technical roadmap of this paper
2.1 數(shù)據(jù)預處理
數(shù)據(jù)預處理過程包括輻射定標、大氣校正、幾何糾正,最后將2 m全色影像與8 m多光譜影像利用Pansharp方法進行圖像融合,得到2 m分辨率的融合圖像[15]。數(shù)據(jù)預處理操作使用PIE-Basic 6.0軟件完成。PIE-Basic 6.0軟件針對國產(chǎn)高分系列衛(wèi)星集成了輻射定標、大氣校正、幾何糾正、圖像融合等功能算法和參數(shù)。利用野外實地考察與圖像目視解譯相結合的手段,對圖像中的尾礦庫進行樣本勾畫,作為影像中尾礦庫分布范圍的真實參考。圖3展示了勾畫的尾礦庫分布范圍的真實參考示例。

(a) 示例1(b) 示例2(c) 示例3(d) 示例4圖3 研究區(qū)內(nèi)的尾礦庫樣本示例Fig.3 Examples of the tailing ponds in the study area
2.2 尾礦庫空間范圍識別的深度學習方法
本文采用深度學習語義分割中應用較為廣泛的U-Net網(wǎng)絡原理。U-Net最早由Ronneberger等[16]提出并應用于醫(yī)學影像分割,實驗證明U-Net網(wǎng)絡在訓練樣本少的情況下仍然能取得很好的分割效果。2017年 Deepsense.ai公司[17]在參與kaggle競賽時改進了U-Net網(wǎng)絡,改進后的U型網(wǎng)絡與U-Net網(wǎng)絡相比雖然都使用了編碼-解碼結構,但是在每次池化操作之后并不增大特征圖的維度,而是保持了64層,并對網(wǎng)絡最終的輸出層做了調(diào)整,使得輸入圖像和輸出圖像在高度和寬度上具有相同的尺寸,這樣的網(wǎng)絡特性更適宜于遙感圖像中小樣本對象的目標識別與提取。本文以該改進后的U-Net為框架,針對GF-6衛(wèi)星影像中的尾礦庫目標,設計的網(wǎng)絡結構和詳細參數(shù)如圖4所示。
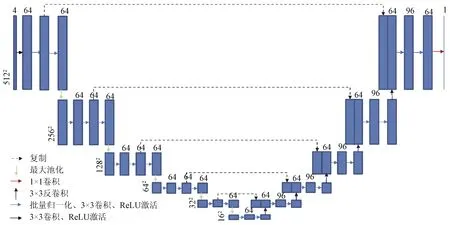
圖4 GF-6衛(wèi)星影像尾礦庫空間范圍識別的網(wǎng)絡結構Fig.4 Network structure of spatial range recognition of tailing ponds using GF-6 satellite image
本文設計的網(wǎng)絡采用全卷積運算方式實現(xiàn),網(wǎng)絡的輸入是4×512×512尺寸(波段數(shù)為4,圖像寬高均為512像素)的遙感圖像,經(jīng)由卷積層、池化層、激活層、標準化等操作進行處理得到64×16×16尺寸的特征圖,這一過程稱為下采樣。為了恢復到輸入的遙感圖像尺寸大小,需要進行圖片的擴展操作,即上采樣。上采樣操作主要有一系列的卷積層、激活層、反卷積層和標準化處理等操作構成。上采樣與下采樣之間存在直接的信息連接,使得上采樣過程中可以更好地恢復尾礦庫目標的特征細節(jié)。網(wǎng)絡的輸出圖像是與輸入影像具有相同尺寸的單波段二值分類結果圖像,其中,值為1的像元為網(wǎng)絡識別的尾礦庫目標像元,值為0像元為網(wǎng)絡識別的背景像元。
本文以pytorch為編程框架、pycharm為編譯器,通過python語言編程實現(xiàn)所設計的U-Net網(wǎng)絡,對尾礦庫進行空間范圍智能識別。將研究區(qū)劃分為訓練集數(shù)據(jù)采集區(qū)域和測試集數(shù)據(jù)采集區(qū)域。在訓練集數(shù)據(jù)采集區(qū)域,將圖像裁剪為4×512×512尺寸的圖像,其中含有尾礦庫目標的圖像109張,再隨機加入109張不含有尾礦庫目標的圖像,然后經(jīng)過對稱、旋轉、彩色變換等方式對數(shù)據(jù)進行擴充,最終獲得1 200張4×512×512尺寸的圖像作為訓練數(shù)據(jù)(即training data),即訓練樣本的規(guī)模大小為1 200張圖像。在測試集數(shù)據(jù)采集區(qū)域,通過裁剪得到60張4×512×512尺寸的圖像作為測試數(shù)據(jù)(即testing data),即測試樣本的規(guī)模為60張圖像,用以對本文方法的精度進行測試驗證。本文使用訓練數(shù)據(jù)集對深度學習網(wǎng)絡進行訓練,使用測試數(shù)據(jù)集對訓練完成的模型進行精度驗證。訓練數(shù)據(jù)和測試數(shù)據(jù)來源于影像的不同區(qū)域,相互之間不存在交集。訓練數(shù)據(jù)和測試數(shù)據(jù)的時相均為2019年2月6日。
2.3 對比方法
為了驗證本文方法的優(yōu)勢,將本文方法與3種當前常見的用于遙感識別尾礦庫空間范圍的方法進行了對比,即隨機森林算法[7]、支持向量機算法[8]、最大似然法[9]。表2展示了經(jīng)過網(wǎng)格搜索參數(shù)的方法最終獲得的各個分類方法達到最優(yōu)識別效果的參數(shù)設置。
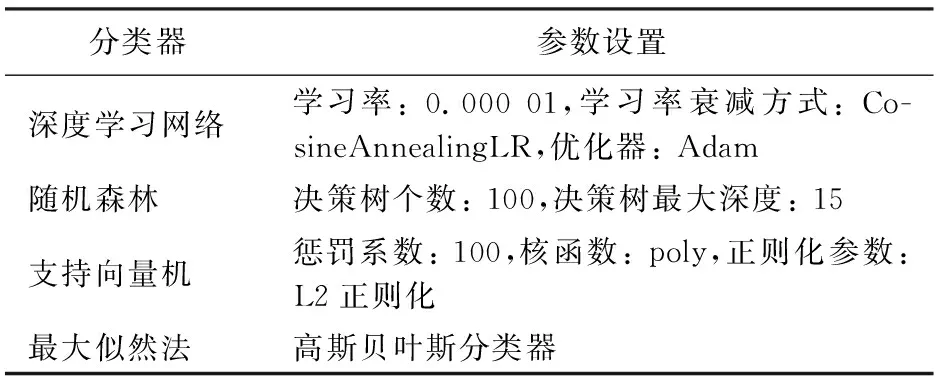
表2 4種識別算法的參數(shù)設置Tab.2 Parameter setting of four recognition algorithms
3 結果與討論
3.1 精度對比
本文基于深度學習的方法以及隨機森林、支持向量機、最大似然法對測試數(shù)據(jù)集區(qū)域的尾礦庫空間范圍識別結果如圖5所示。通過將識別結果與勾畫的尾礦庫真實分布范圍參考相對比,可以發(fā)現(xiàn)本文基于深度學習的方法提取的尾礦庫空間范圍與尾礦庫的真實空間范圍分布最為接近,結果優(yōu)于隨機森林、支持向量機、最大似然法等方法。為了進一步說明本文方法的精度優(yōu)勢,本研究采用混淆矩陣以及精確率(Precision)、召回率(Recall)、F1-score值3個參數(shù)對空間范圍提取結果進行了精度評價。精確率指的是正確識別的尾礦庫像元數(shù)占所有識別為尾礦庫像元總數(shù)的比例,即尾礦庫類別的用戶精度。召回率又稱為查全率,指的是正確識別的尾礦庫像元數(shù)占地面真實尾礦庫像元總數(shù)的比例,即尾礦庫類別的制圖精度。F1-score是精確率和召回率的調(diào)和平均數(shù),是精度的綜合評價指標。這3個指標廣泛用于圖像目標智能識別的精度評價[18-20]。
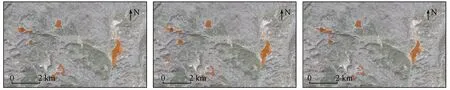
(a) 本文方法結果(b) 隨機森林結果(b) 支持向量機結果
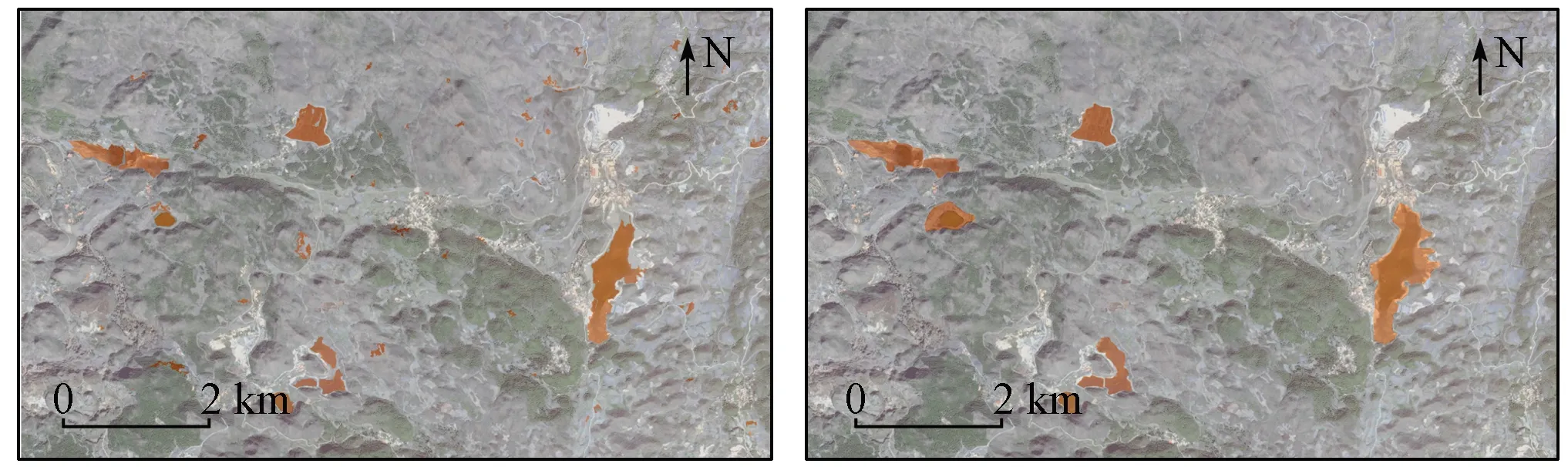
(d) 最大似然法結果(e) 參考范圍

圖5 尾礦庫識別結果及參考范圍Fig.5 The result of recognition of tailing ponds and the real boundary as reference
3個指標的計算方法為:
(1)
(2)
(3)
式中:TP為尾礦庫正確識別的像元個數(shù);FN為把尾礦庫識別為非尾礦庫的像元個數(shù);FP為把非尾礦庫識別為尾礦庫的像元個數(shù);TN為非尾礦庫正確識別的像元個數(shù)。
在相同的測試區(qū)域,不同方法得出的精度如表3所示。最大似然法對尾礦庫空間范圍的提取精度最差,支持向量機和隨機森林算法次之,本文方法的精度最好。最大似然法的實現(xiàn)原理簡單,是遙感圖像分類算法較為廣泛的算法之一,但是該方法假定研究區(qū)的目標光譜特征分布近似正態(tài)分布。本研究中最大似然法的精度最差,可能是研究區(qū)的光譜特征分布并不符合該假定條件。雖然隨機森林的精度優(yōu)于支持向量機,但是從Precision上看兩者精度差距很小,而且在3個精度指標上均顯著低于本文方法。本文方法在測試數(shù)據(jù)集上得出的結果誤分區(qū)域面積最小(圖5和表3),Precision,Recall,F(xiàn)1-score值分別達到0.874,0.843,0.858; 相比之下,本文方法在測試數(shù)據(jù)集上的精度最高、尾礦庫識別效果最好,能夠滿足尾礦庫空間范圍準確提取的需求。
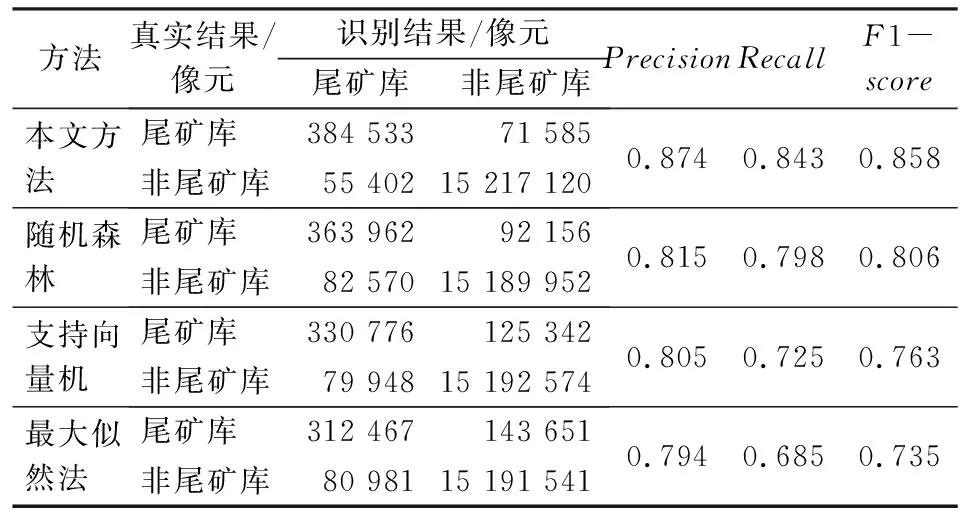
表3 不同方法的精度對比Fig.3 The comparision of the accuracy of different methods
3.2 速度對比
不同方法的計算機運行環(huán)境相同,詳見表4。為了說明本文方法在識別尾礦庫空間范圍速度上的可行性,本文對不同方法的運行時間進行了統(tǒng)計,如表5所示。最大似然法由于方法實現(xiàn)簡單,所以耗時最短。支持向量機算法消耗時間最長。但是,4種方法的消耗時間在相同的數(shù)量級水平。總體來說,本文方法在保持顯著精度優(yōu)勢的前提下,與隨機森林、支持向量機、最大似然法的時間消耗保持相同水平。幾十秒量級的時間消耗水平為在更大區(qū)域范圍內(nèi)進一步應用本文方法提供了技術基礎。
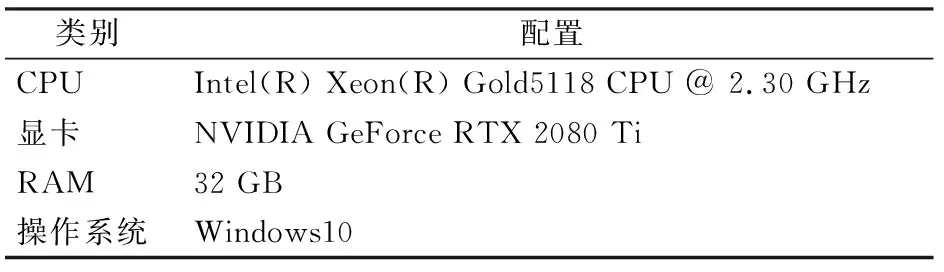
表4 計算機配置參數(shù)Tab.4 Details about computer configuration
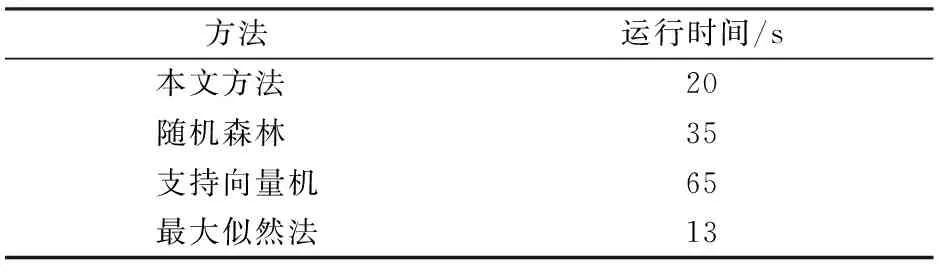
表5 不同方法的運行時間Tab.5 Run time of different methods
4 結論與展望
本文針對大面積區(qū)域范圍內(nèi)尾礦庫有效監(jiān)測監(jiān)管的重大需求,提出了基于深度學習的尾礦庫空間范圍智能識別方法。主要結論包括:
1)本文所提方法是首次利用深度學習和GF-6影像開展尾礦庫空間范圍智能識別,在云南省紅河哈尼族彝族自治州內(nèi)的驗證結果表明空間范圍識別精度能夠滿足尾礦庫空間范圍變化監(jiān)測的需求。
2)通過不同方法的識別效果和精度評價對比,本文方法的識別效果和識別精度顯著優(yōu)于隨機森林、支持向量機、最大似然法等主流方法。
3)本文方法在識別尾礦庫空間范圍的時間消耗上與主流方法保持相同的數(shù)量級水平,時間消耗符合業(yè)務化推廣應用的實際需求。
綜上所述,本文方法有望在全國尾礦庫空間范圍變化遙感快速監(jiān)測中開展實際推廣應用。此外,為了進一步提升本文方法的識別精度,在未來的工作中需要進一步擴充尾礦庫高分影像樣本數(shù)據(jù)。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
