基于滑模控制的角形級聯靜止同步補償器快速不平衡補償方法
2022-01-06 09:43:58何小勇
湖南電力 2021年5期
何小勇
(國網湖南省電力有限公司郴州供電分公司,湖南 郴州 423000)
0 引言
隨著電力工業的不斷發展,電網對無功補償的要求日益嚴格[1-4]。當電網發生故障或者接入不平衡負載時,電網電壓會出現三相不平衡狀態,但是傳統無功補償裝置不能對其及時進行補償,這威脅到了電網的安全穩定運行。基于角形級聯多電平結構的STATCOM 是一種新型無功補償裝置,能夠輸出電流對無功和負序電壓進行快速補償,其具有模塊化、易擴展的優點,在中高壓配電網中具有廣闊的應用前景[5-8]。
對此,文獻[9] 提出了角形STATCOM 的三級平衡控制策略,包括整體平衡、相間平衡和相內平衡控制,利用三相有功電流矢量來合成零序環流指令,提升了STATCOM 的穩定性。角型級聯STATCOM 三相鏈節之間允許存在零序環流,環流只在角內流動,不影響補償器的線電流,但零序環流會影響鏈節的有功功率。因此可以利用零序環流來實現相間有功功率的調節[10-12]。文獻[13] 對比了角形和星型級聯STATCOM 的不平衡補償能力,推導了分相控制法與零序電壓注入法的功率平衡控制等效性。為改善STATCOM 補償無功和負序電流的性能,文獻[14] 研究了LCL 濾波的級聯STATCOM,并提出了零序和負序電壓注入的功率平衡方法。文獻[15] 研究了負序電壓注入的相間直流電壓均衡控制策略,文獻[16] 為提高電網不平衡下相間直流電壓的動態性能,提出了dq坐標系上的負序電壓前饋控制方法。
相比于星形級聯 STATCOM,角形級聯STATCOM 利用環流電流實現相間平衡,具有更強的不平衡電壓耐受能力[16-17]。當電網故障或者接入不平衡負載出現電壓單相跌落等不平衡工況時,角形級聯STATCOM 能夠同時輸出正負序電流補償電網電壓。但直接利用電網電壓正負序分量經PI控制計算補償電流指令的方法需要的動態調節時間長,不利于電壓的快速補償。針對此問題,本文提出基于滑模控制的角形級聯STATCOM 快速補償方法,首先,采樣公共連接點 (Point of Common Coupling,PCC) 處的三相電網電壓并進行正負序分解求得電網電壓的正序分量和負序分量;接著,引入滑模PI 控制,快速求解補償電流指令;最后,將求解的補償電流指令信號與角形級聯STATCOM電壓穩定控制、相間平衡控制和電流內環控制相結合,控制STATCOM 輸出無功電流來抑制電網不平衡。
1 角形級聯STATCOM 快速補償方法
1.1 角型級聯STATCOM 系統結構
角型級聯STATCOM 系統結構如圖1 所示,為每一相鏈節由n個H 橋模塊級聯的角形級聯STATCOM 的結構圖,其中,Va、Vb、Vc是三相電網公共連接點處的相電壓,Ls是電網等效阻抗,ia、ib、ic是角形級聯STATCOM 線電流,L是角形級聯STATCOM 濾波電抗,iab、ibc、ica是角形級聯STATCOM 相電流。電網發生故障或者接入不平衡負載時,電網電壓可能會出現單相跌落等不平衡工況,導致正序電壓跌落并出現負序電壓分量,需要STATCOM 對電網同時進行無功和負序補償,才能維持電網穩定。
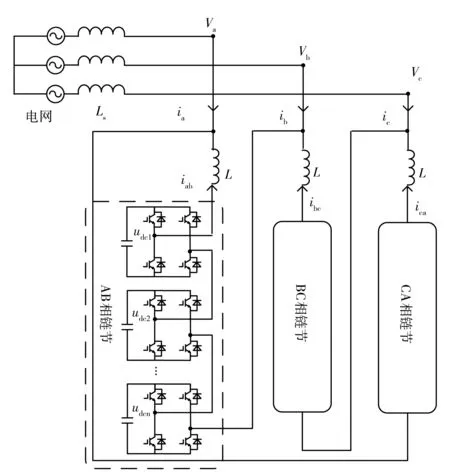
圖1 角形級聯STATCOM 結構圖
1.2 基于滑模控制的指令信號獲取方法
圖2 所示為角形級聯STATCOM 的正負序電壓信號獲取方法框圖。利用基于廣義二階積分器的電壓檢測,快速準確地提取相位和頻率信息,使得系統能夠在不對稱故障下仍能保證準確的電網同步。將Va、Vb、Vc分別變換到正負序dq坐標系下:
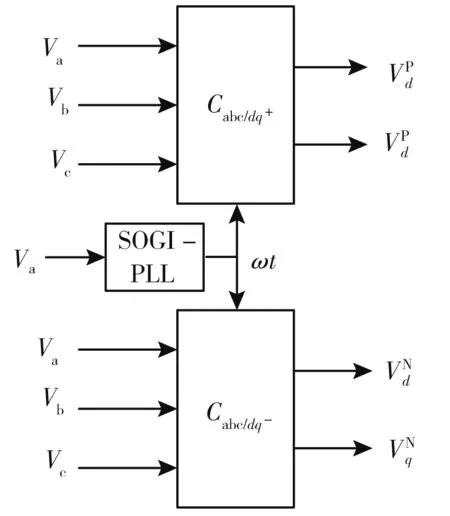
圖2 正負序電壓信號獲取方法框圖
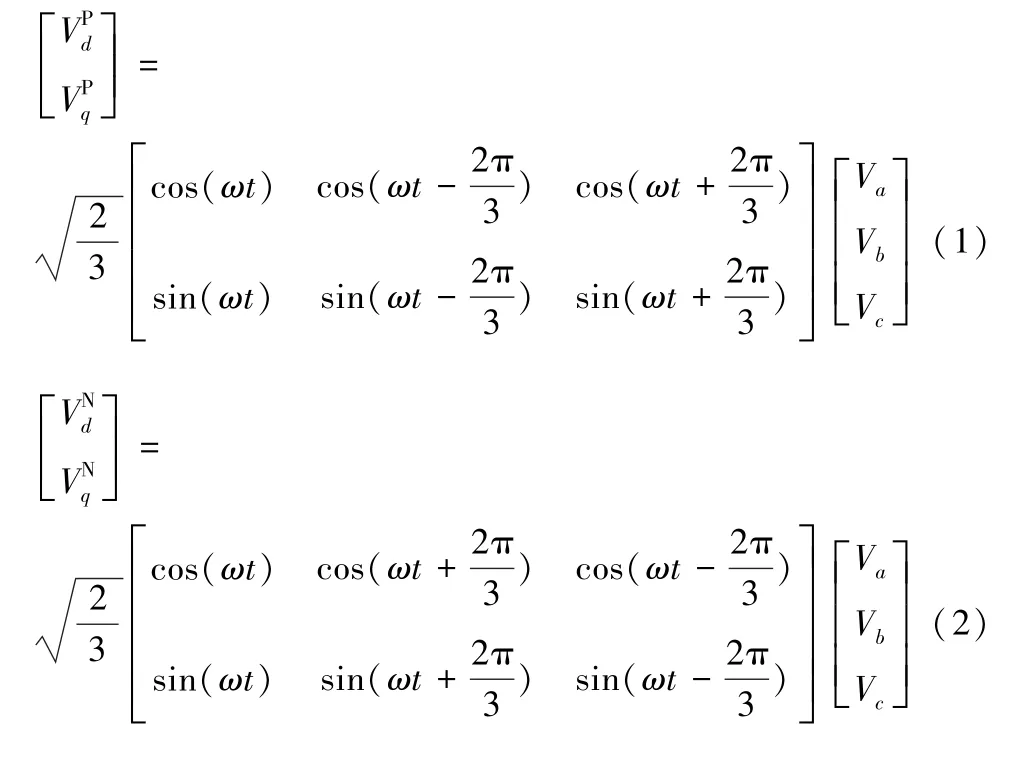
其中上標P 表示正序分量,上標N 表示負序分量,ω為經過檢測獲得的三相電網電壓同步旋轉角速度,t為時間,是正序基波電壓d軸分量,是正序基波電壓q軸分量,是負序基波電壓d軸分量,是負序基波電壓q軸分量。
圖3 所示為所提基于滑模控制的指令快速獲取方法框圖。
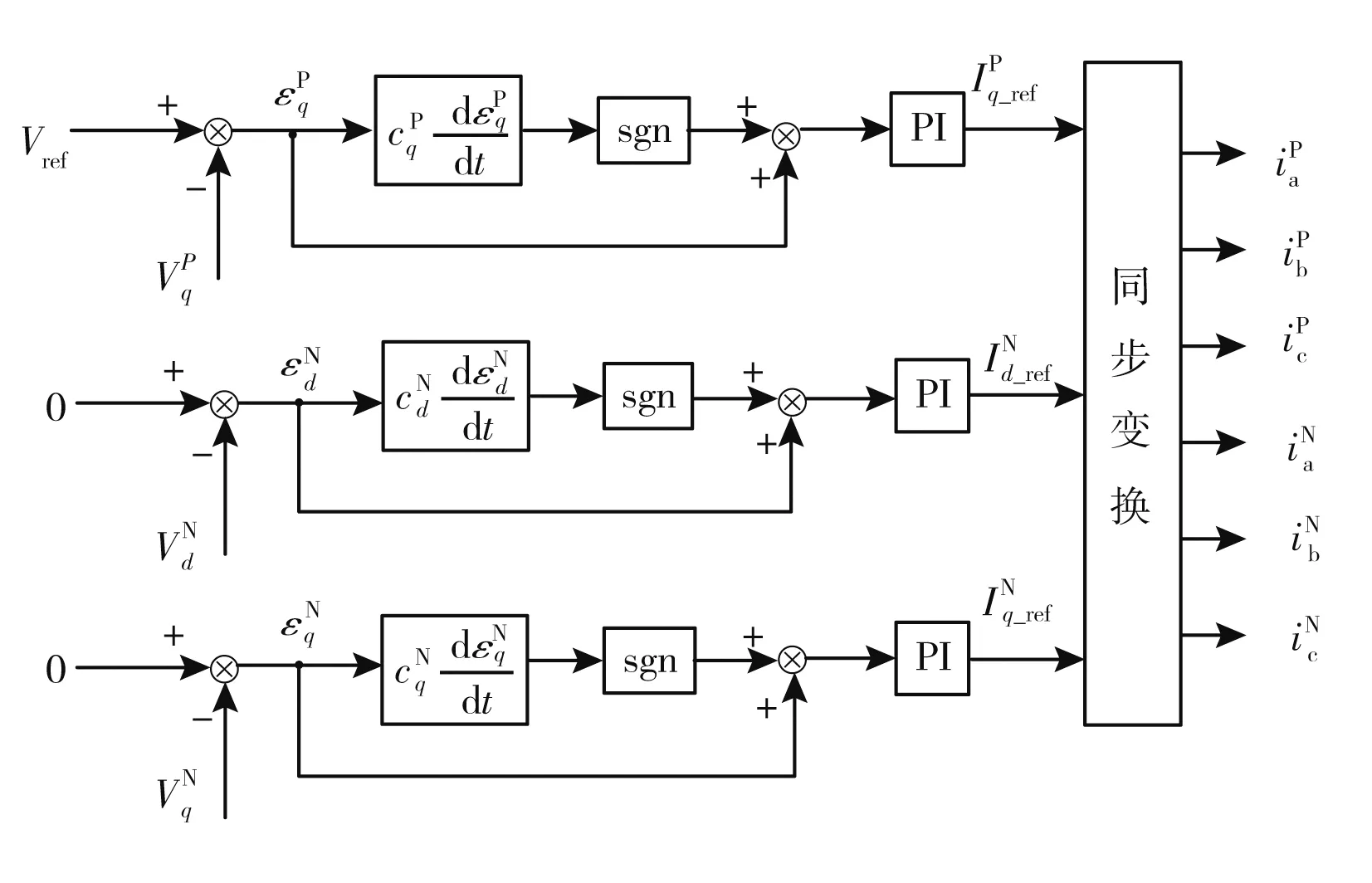
圖3 滑模PI 控制指令獲取方法框圖
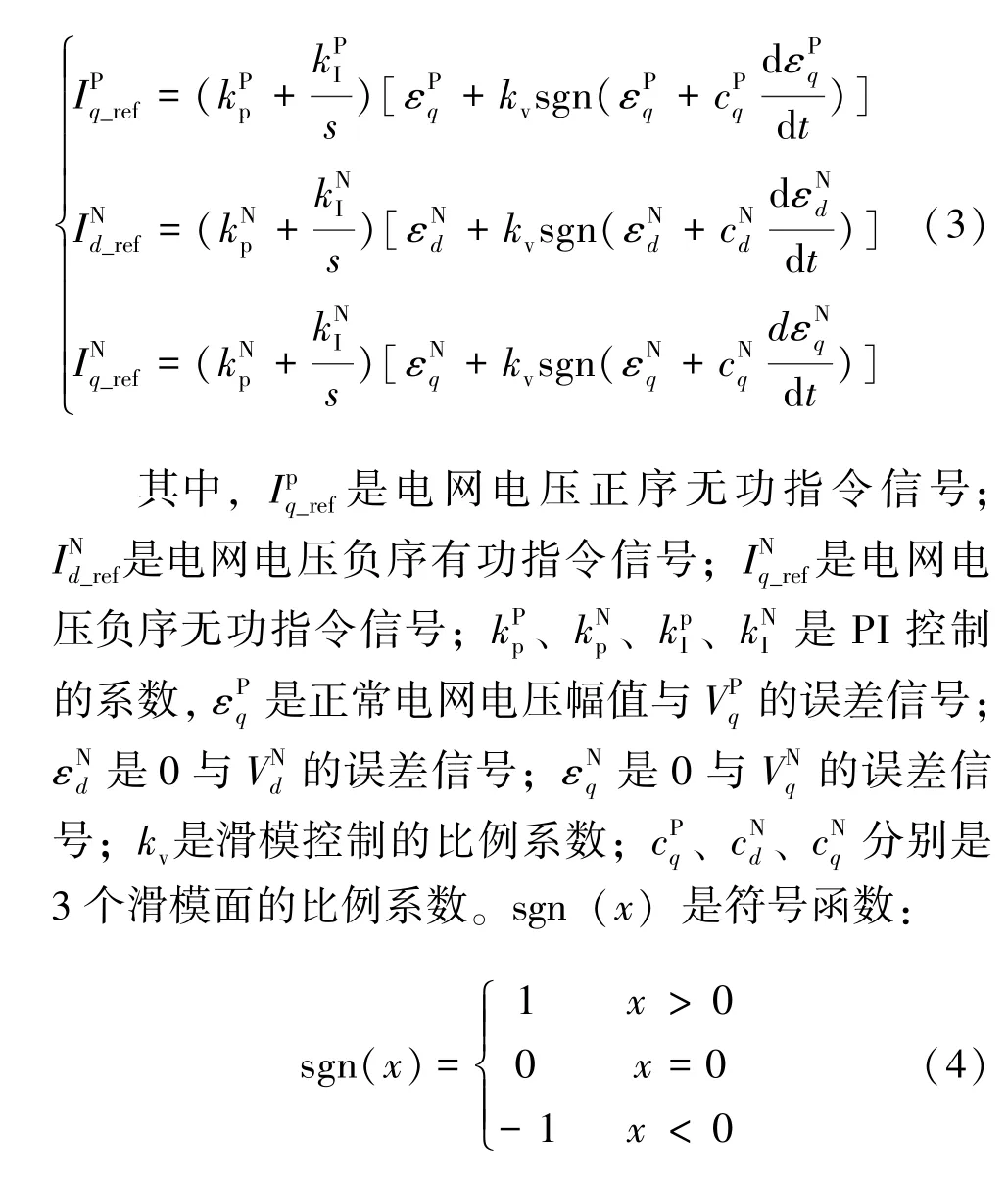
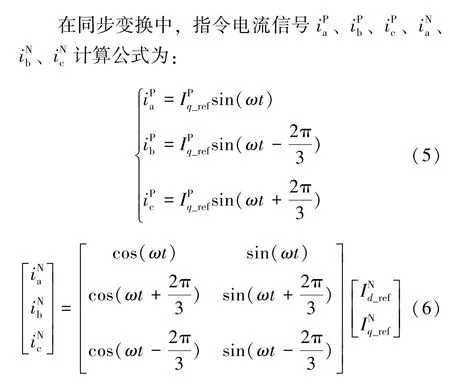
正序基波電壓q軸分量的指令值是正常電網電壓的幅值;為抑制負序電壓,將和的指令值設為0。可得指令信號為:
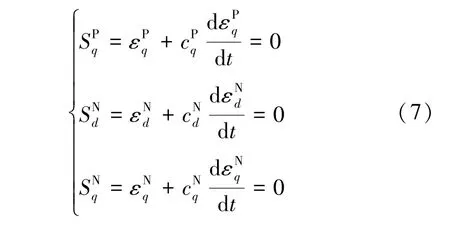
滑模控制具有使系統在一定條件下沿規定的狀態軌跡做小幅度、高頻率的上下運動的特性。滑模控制系統通過對滑模面切換函數S的符號來進行判別,不斷切換控制量來改變系統結構,使得系統達到設計好的滑模面S=0 上,然后系統沿滑模面進行滑動。到達過程和滑動過程的特性決定了滑模控制的動態響應速度。在滑模控制時,需要限制控制狀態到其相應的滑模面。其中,三個滑模面的切換函數S要滿足以下公式:
角形級聯STATCOM 通過滑模控制,就可以快速地對電網電壓的正負序分量誤差進行校正,同時還有較強的魯棒性。PI 控制器具有可以無誤差地跟蹤直流分量的特性,還可以增加控制系統的自由度,因此在dq坐標系下,將滑模控制與PI 調節相結合,能夠快速精準地補償不平衡電網電壓的無功和負序分量,在穩態時,還可以迅速對噪聲進行響應,抑制電網波動,保證電網的穩定運行。
1.3 角形級聯STATCOM 功率平衡控制
角形級聯STATCOM 各相鏈節的直流側相互獨立,由電容完成電壓支撐功能,無法提供大量有功電流。因此每相鏈節可以等效為純無功元件。基波正序無功分量不影響鏈節與電網之間的有功交換,但基波負序分量與線電壓相量非正交,會導致某些相鏈節持續輸入有功功率,而其他相鏈節持續輸出有功功率,導致直流側電容電壓發散,影響STATCOM 的穩定性。
設STATCOM 向電網輸出平均有功功率為Ps,每相鏈節實際輸出有功功率平均值分別為Pab、Pbc、Pca,滿足:

每相鏈節輸出有功功率平均值分別為PCab、PCbc、PCca,滿足:
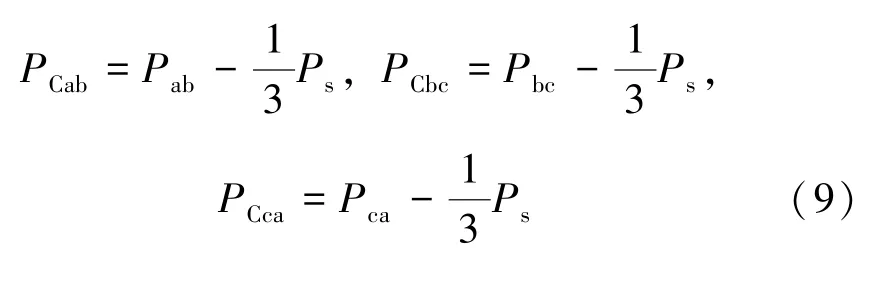
PCab、PCbc、PCca包含有正序分量、負序分量和零序分量,因此可以根據每相鏈節間直流側總電壓的偏差值,來生成零序環流指令,形成有功環流來調節各相鏈節的直流側總電壓,就可以實現各相鏈節直流側電壓的平衡。
如圖4 所示為零序環流在角形STATCOM 內流動的示意圖。零序環流不影響STATCOM 的線電流輸出,通過構造與鏈節相電壓同相的有功分量,產生在三角形結構內流動的零序環流來補償各相間鏈節電壓的不平衡。
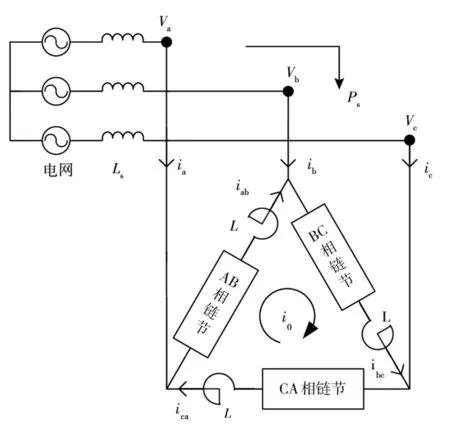
圖4 零序環流在角形STATCOM 內流動示意圖
角形級聯STATCOM 控制框圖如圖5 所示。為指令電流信號,Udc_ref為直流側總電容電壓指令值,Udc為三相鏈節直流側總電壓的平均值,為三相線電流指令信號。零序環流指令根據相間平衡控制方法可得。由STATCOM 角內零序環流的約束條件:
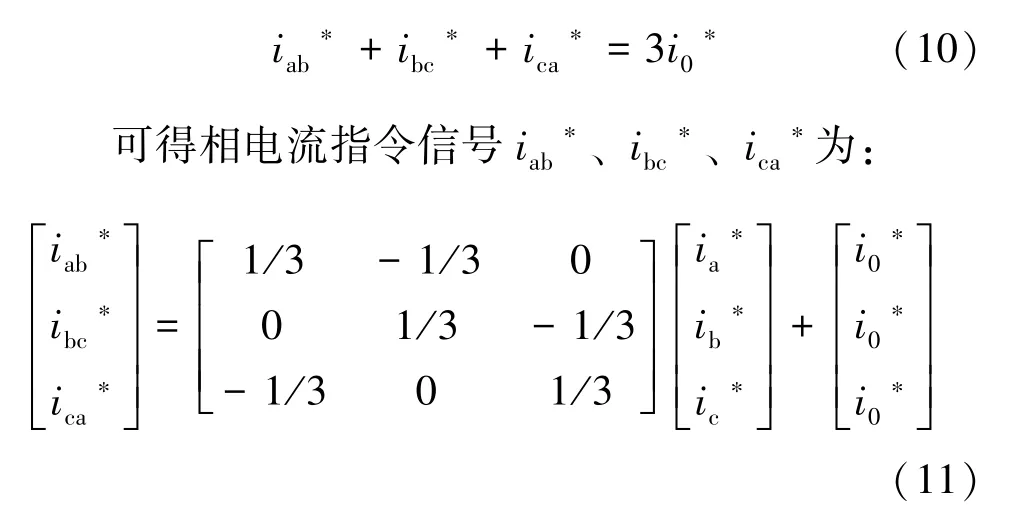
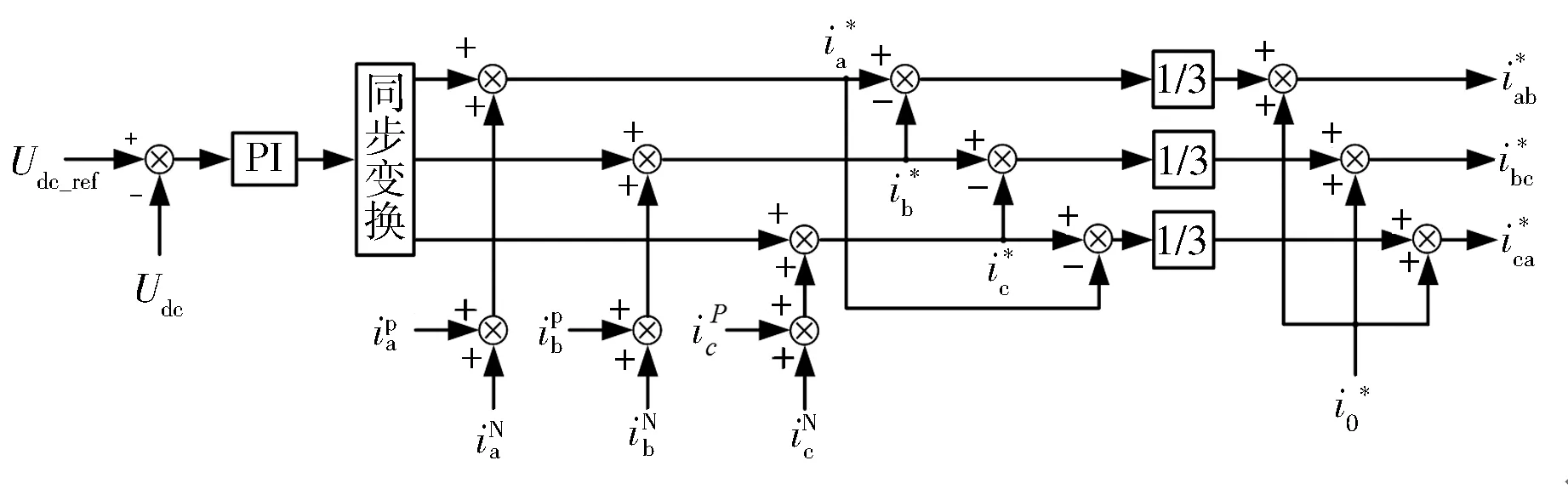
圖5 角形級聯STATCOM 控制框圖
STATCOM 整體電壓外環采用比例積分PI 控制,電流內環采用比例P 控制,依靠雙閉環控制,STATCOM 可以根據指令信號快速向電網注入正序無功和負序電流來補償電網電壓。
2 仿真驗證
為驗證所提出的指令信號獲取方法在電網故障情況下的有效性,在PSIM 環境下搭建了5 電平角形級聯STATCOM 仿真模型,主要仿真參數見表1。
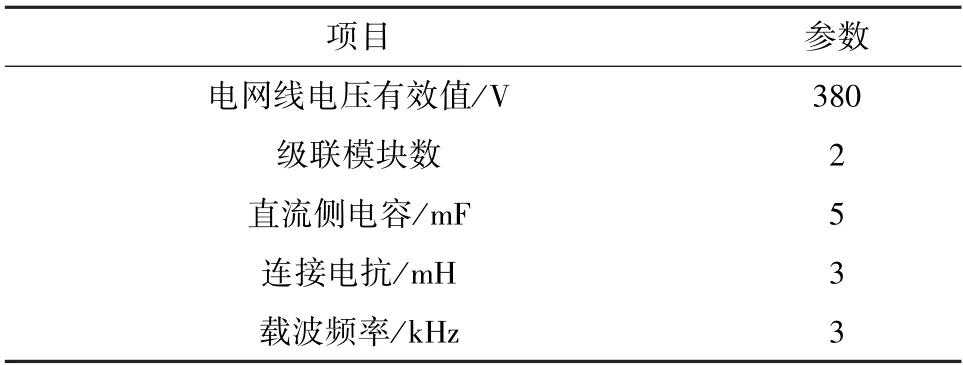
表1 主要仿真參數
角形級聯STATCOM 經過PCC 點并聯接入電網中,在仿真中,通過修改電網電壓幅值來模擬電網不平衡工況。電網等效電抗為LS=0.2 mH,電阻忽略不計。故滑模PI 控制方法中,參數選取如下:0.000 1,=0.000 083。IGBT 驅動根據載波移相方法調制后獲得。
為驗證所提控制方法的正確性,在補償單相跌落、補償兩相電壓跌落兩種工況下,對角形級聯STATCOM 分別采用所提方法與基于PI 控制器的常規指令電力獲取策略進行仿真,PI 控制器比例系數為3,積分系數為12。
工況一為電網電壓在t=0.24 s 時發生單相跌落16%,設定STATCOM 在t=0.3 s 時進行補償,PCC 電壓變化情況如圖6 所示。圖7 給出了電壓跌落與補償前后,電壓正負序分量的變化情況。圖8給出了STATCOM 輸出電流波形圖。由圖6 可以看出,采用所提方法與常規方法的角形級聯STATCOM 都可以根據不平衡情況進行補償。根據圖7 (a) 和圖8 (a) 可知,角形級聯STATCOM根據電網電壓中的無功缺額和所含有的負序分量,通過滑模PI 控制,快速獲取指令電流,向電網中注入無功和負序電流,具有較短的暫態調節過程,可以更快地補償電網不平衡。而根據圖7 (b) 和圖8 (b) 可知,采用常規方法來獲取補償電流指令時,會面臨更長的暫態調節過程,且補償精度也低于采用所提控制方法的情況。
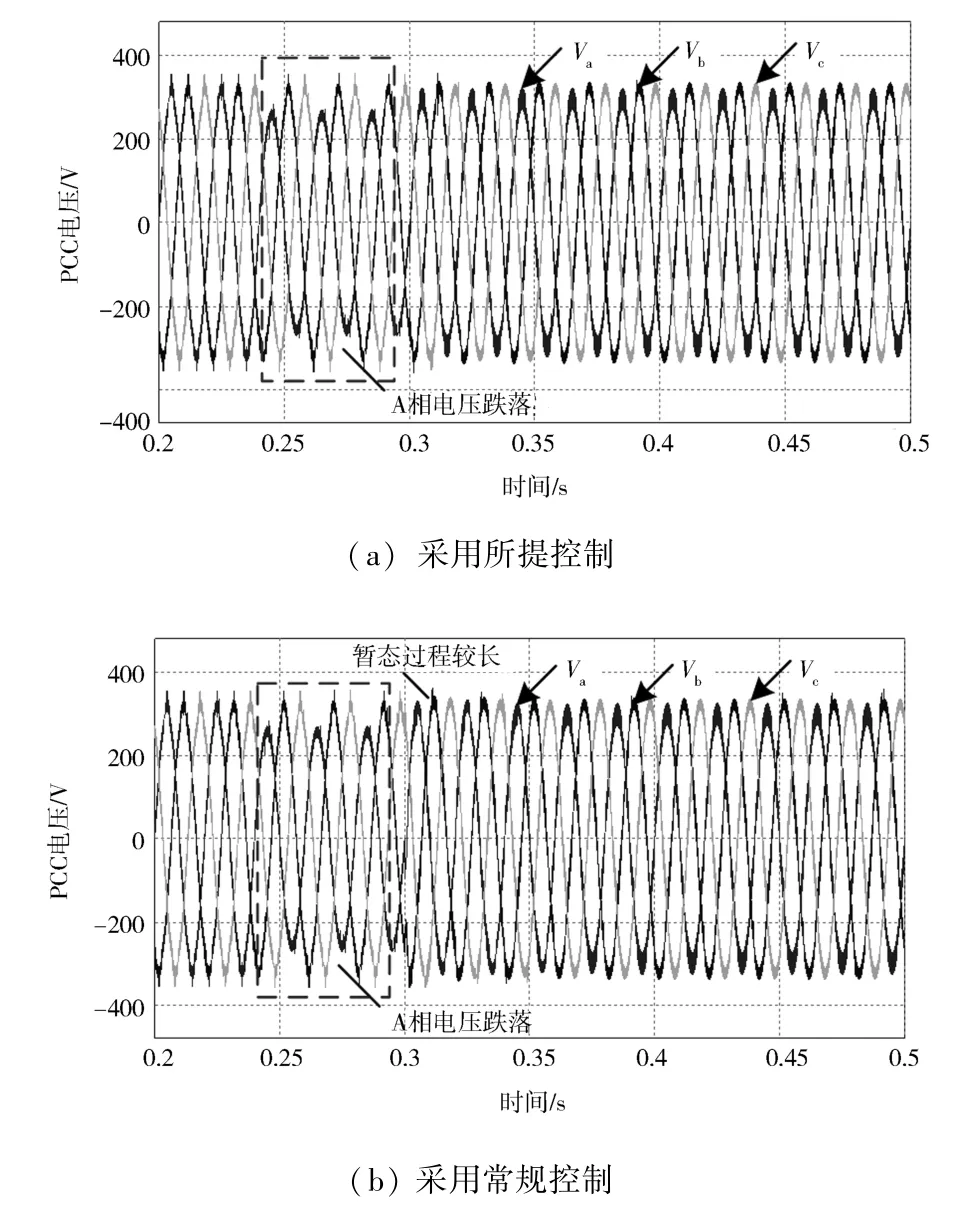
圖6 工況一PCC 相電壓波形圖
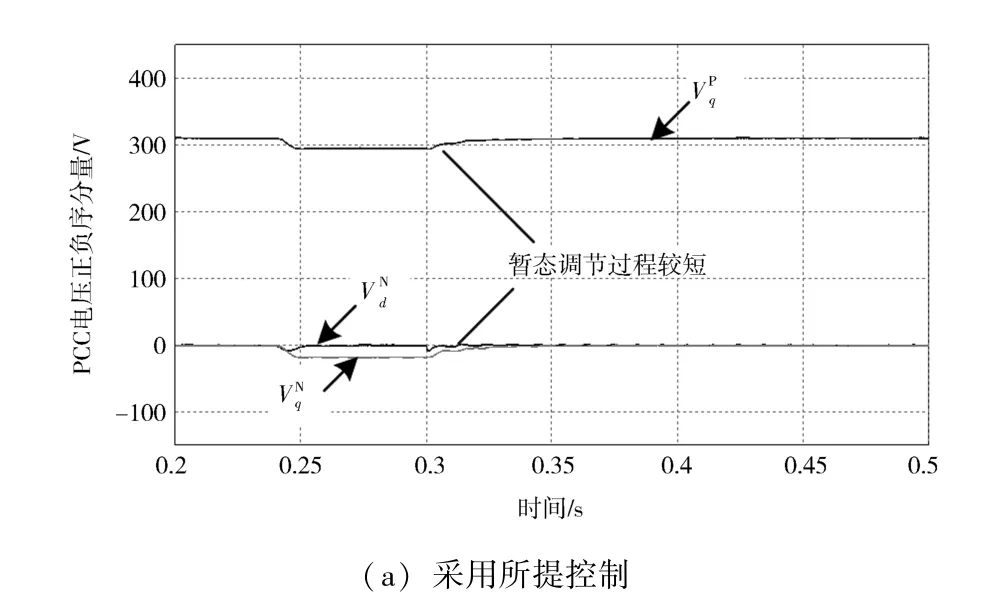
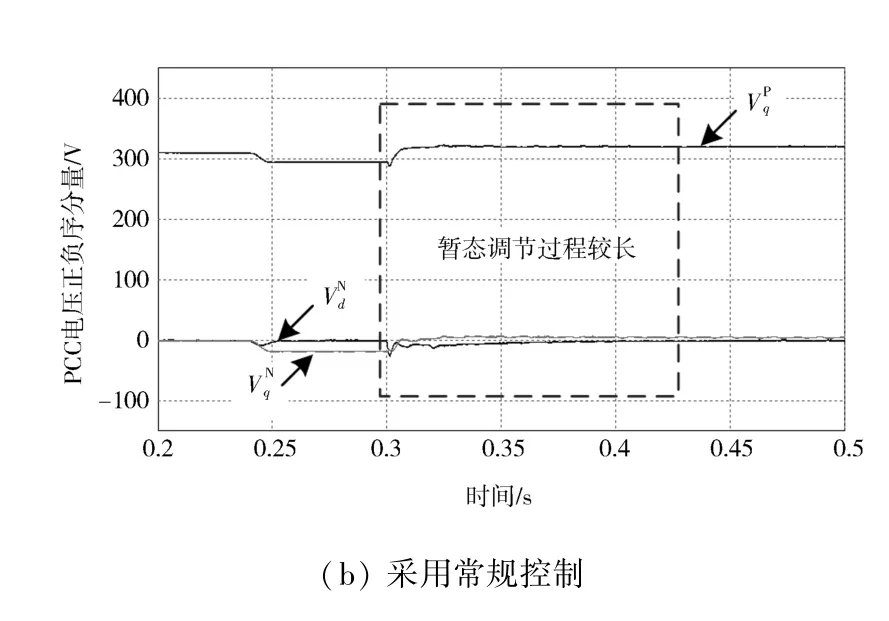
圖7 工況一PCC 電壓正序和負序分量圖

圖8 工況一STATCOM 輸出電流波形圖
工況二為在t=0.24 s 時,電網A 相和B 相電壓跌落16%,STATCOM 在t=0.3 s 時投入電網進行補償,電網電壓變化情況波形如圖9 所示。對應的STATCOM 輸出電流波形如圖10 所示。對比圖10 (a) 和(b) 可知,在兩相電壓跌落的工況下,所提方法具有更快的響應速度。經過補償之后,A相和B 相電壓有效值由補償前的190 V 恢復到212 V,電壓無功和負序分量得到了有效的補償。但是由于所研究系統沒有接入中性線,單相與兩相電壓不平衡會導致零序電壓分量出現,所提STATCOM 暫未能實現完全補償。
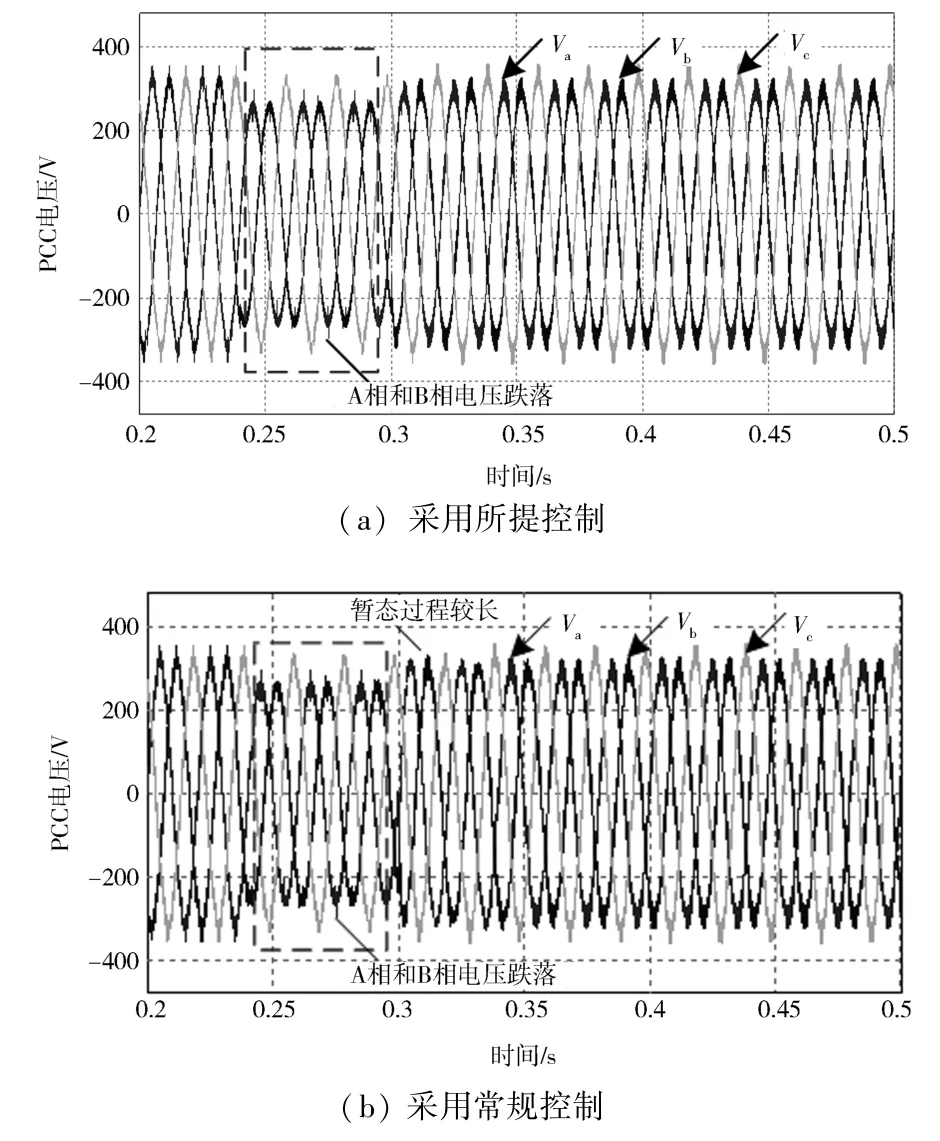
圖9 工況二PCC 相電壓波形圖
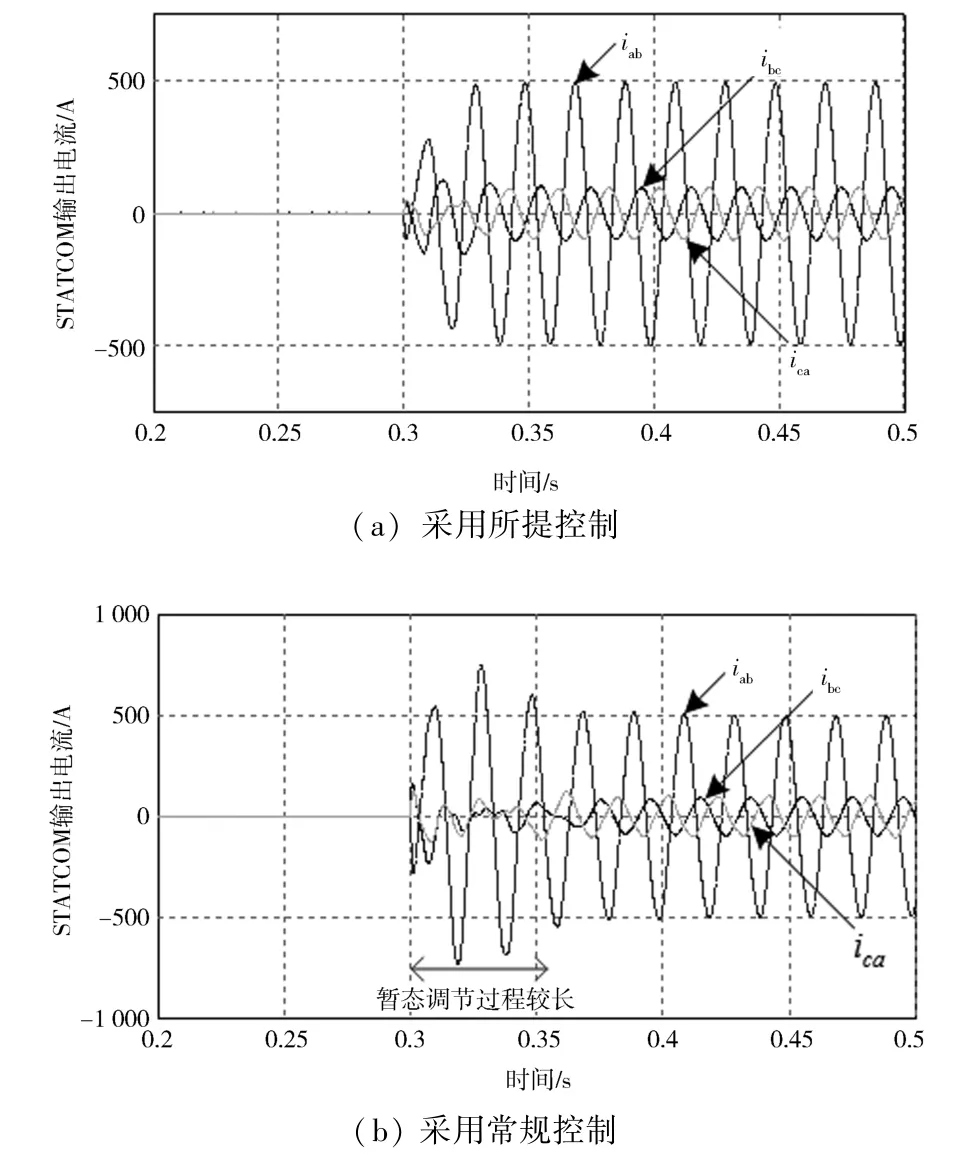
圖10 工況二STATCOM 輸出電流波形圖
3 結語
本文提出了一種基于滑模控制的角形級聯STATCOM 快速補償方法,引入滑模控制并與PI 調節相結合,能夠快速地計算出不平衡電壓補償所需的補償電流指令信號,提升不平衡補償響應速度。結合角形級聯STATCOM 的電壓穩定控制、相間平衡控制和電流內環控制,實現電網電壓的快速精準補償。仿真研究表明,角形級聯STATCOM 在采用所提方法后,能夠實現電網不平衡工況的快速補償。