無人機在礦區表土特征及地質災害監測中的應用
2022-01-04 12:08:38龍林麗張旭陽蘇永東陳孝楊
煤田地質與勘探 2021年6期
關鍵詞:模型
龍林麗,劉 英,2,張旭陽,蘇永東,陳孝楊,2
無人機在礦區表土特征及地質災害監測中的應用
龍林麗1,劉 英1,2,張旭陽1,蘇永東1,陳孝楊1,2
(1. 安徽理工大學 地球與環境學院,安徽 淮南 232001;2. 安徽省高潛水位礦區水土資源高效綜合利用工程實驗室,安徽 淮南 232001)
隨著無人機的出現和發展,各種傳感器的小型化和智能化程度不斷提高,裝載傳感器的無人機成為獲得空間數據的高效工具。因其成本低、重訪周期短、快速高效、質輕靈活、操作簡便、影像獲取時空精度高等特點,廣泛應用于礦區土地損傷監測。以“無人機(UAV)、反演(Inversion)、土壤監測(Soil Monitoring)、地表塌陷(Surface Collapse)、地裂縫(Ground Fissure)”為關鍵詞,通過總結Web of Science、知網、谷歌學術等檢索系統中2010年1月—2021年5月發表的學術論文,對比分析無人機監測技術與其他監測技術的差別,綜述無人機監測礦區重金屬、土壤含水率、含鹽量、地表塌陷、地裂縫及邊坡穩定性的一般流程及數據處理方法,并概述無人機在礦區表土特征及地質災害監測中的應用前景,認為未來可通過集成野外時序跟蹤調查、高精度土壤質量監測技術、高空間分辨率無人機監測技術、數字模擬手段和典型工作面的試驗監測與分析,研究工作面自開切眼至停采線動態推進中地質災害與土壤質量演化耦合關系,構建采煤沉陷區土壤質量演化預測理論體系和時序演變模型。從而進一步探討礦區土壤質量與地質災害之間的關系,提出減緩、控制及提升礦區土壤質量的措施,為我國煤炭生產基地煤炭資源開采與生態環境的協調可持續發展提供技術支撐。
無人機;采煤礦區;土壤監測;地質災害監測
礦產資源在國民經濟發展中占有重要地位[1],隨著工業的快速發展,人們對礦產資源的需求量顯著增加[2]。通常礦物的開采方式有露天開采和地下開采2種,這2種方式在開采過程中都會影響礦區生態環境,如地下開采會引起地表沉陷,形成大量地裂縫,破壞耕地,加劇水土流失、破壞植被等。露天開采產生的矸石、尾礦固體廢物及直接剝離表層土壤、形成排土場壓占土地等都會影響土地可持續利用[3]。因此,在采礦過程中,利用現代高新技術對礦區生態環境進行實時監測是合理規劃可持續開采的關鍵。
礦區常用的監測技術包括野外現場監測技術、全球導航衛星技術(GNSS)、合成孔徑雷達干涉測量技術(InSAR)、三維激光掃描技術、無人機航測技術[4]等。傳統的野外現場監測的一般步驟都是野外考察,布設監測點,儀器監測,最后通過周期性的監測得到結果,其數據收集工作強度大,數據時效性差。GNSS雖然具有精度高、布網迅速、可全天候工作等特點,但易受衛星信號差的影響[5]。InSAR具有空間分辨率高、全天候、監測范圍大等優點,然而受大氣延遲的影響較大[6]。三維激光掃描技術存在的主要問題是數據質量不佳,點云數據匹配精度不高[7]等。與其他監測方法相比,無人機具有操作簡單、高效快速、靈活方便、分辨率高、數據時效性強[8]等特點,在低空飛行時可快速獲取到厘米級圖像[9]。無人機航測作為動態、經濟、連續的一種數據采集方法,可對采后風險源進行持續監測[10],在礦區生態環境監測中有巨大的應用前景。目前,基于無人機數據的科學研究已經取得一定成果,但無人機在礦區生態監測中的應用拓展有待進一步研究。
筆者利用“無人機(UAV)、反演(Inversion)、土壤監測(Soil Monitoring)、地表塌陷(Surface Collapse)、地裂縫(Ground Fissure)”等檢索詞,在Web of Science、知網、谷歌學術中檢索近十年的文獻,通過無人機在礦區監測目的不同進行分類,對其進行綜合分析,綜述了無人機在礦區表土特征監測、地質災害監測方面的應用,以期為無人機在礦區生態環境監測中的應用與推廣提供借鑒與參考。
1 礦區表土特征監測
1.1 重金屬元素
1) 無人機監測表土重金屬及數據預處理方法
煤炭資源的開發、生產及運輸過程中礦區污水的排放、酸性廢水的淋濾、運輸中的灑落礦物和煤矸石的堆放等,在風蝕、雨蝕、沉降等作用導致礦區及周邊土壤中重金屬大量富集,對土壤造成污染,而重金屬不易被土壤微生物降解,卻可以被動植物富集,某些重金屬還能轉化為毒性更嚴重的甲基化合物,通過食物鏈在人體內蓄積,嚴重影響人體健康[11]。因此,監測礦區土壤重金屬元素是礦區生態環境監測的重要一環。目前研究重金屬對土壤的污染的方法主要包括現場采樣法和遙感監測法。傳統的現場調查可從特定的時刻和位置提供有限的信息,無法提供重金屬濃度分布時空動態變化[12],而無人機遙感的反射光譜法通過電磁輻射反演可快速獲取土壤重金屬含量時空分布特征,是當前熱門且主流的方法之一,一般可分為直接反演和間接反演,直接反演通常是利用無人機獲取的光譜信息與實測重金屬的相關性進行,監測流程是光譜數據獲取、光譜預處理、提取特征波段、研究處理后的光譜與實測重金屬濃度的相關性、構建反演模型;間接反演則是根據不同土壤組分之間的相關關系,構建間接反演模型。
光譜數據在監測時會受到試驗條件與土壤自身條件的影響,需要對光譜數據進行預處理,從而有效提升光譜信息[13]。目前常用的預處理方法包括平滑處理[14]、包絡線去除(CR)[15]、一階導數(FD)[16]、微分校正(DR)[17]、連續小波變換(CWT)[17]、標準正態變量校正(SNV)[18]、多元散射校正(MSC)[19]等諸多方法。高光譜反演重金屬含量的常用光譜波段是400~2 500 nm[20],波段范圍廣,而且土壤光譜反射率不高。為了簡化模型和提高反演精度,更好地解釋土壤重金屬與光譜數據的相關性,需要對光譜數據進行特征分析,分為特征選擇、特征提取和特征增強[21]。特征選擇主要是從特征中選擇起主要作用的子集,方法有Pearson相關性分析、競爭性自適應重加權算法(CARS)、封裝法、嵌入法等[22-24]。特征提取是在原來的特征中,產生一個新子集,也可以起空間降維作用,有主成分分析法(PCA)[25]、最小噪聲分離(MNF)[25]、小波變換(WT)[26]等。特征增強,主要是利用已有變量通過綜合分析而塑造出新變量,通常和預處理一起,特征提取后的光譜能夠更好地捕獲地面重金屬濃度的信息。
利用以上光譜數據預處理方法,突出光譜特征,進而能求取與重金屬最大相關波段,以得到土壤光譜中能表現重金屬元素的敏感波段,如Zn的最大相關波段為515 nm[27],Cr、As、Cu的敏感波段分別是379、1 778、2 018 nm[28]。在土壤重金屬反演研究中,單一敏感波段數據所得到的特征表達能力有限;通過對多波段線性地組合會使特征表達能力得到提升,如宋練等[29]使用2 320 nm和1 755 nm、2 260 nm和2 210 nm、1 920 nm和480 nm的波段進行反演,發現As、Cd和Zn與上述6個波段沒有很好的相關性,但將這6個波段進行組合可得到較好的相關性,預測模型相關系數2分別為0.80、0.71、0.61。需要指出的是,并不是所有重金屬元素都有光譜響應,土壤中的黏土礦物、鐵錳氧化物和有機質等對重金屬離子有吸附作用,這些組分對光譜響應較強,故仍可通過監測其與土壤中其他光譜響應強的組分共同變化來監測光譜特征不明顯的重金屬[30]。
2) 土壤重金屬反演模型
土壤重金屬反演模型主要分為物理模型和數學經驗模型。物理模型是通過確定的物理機理闡述光譜反射率與重金屬含量之間的關系,但在實際應用中,建立物理模型所需的參數很難獲得,且受環境因素影響很大,故通常利用數學經驗模型對土壤重金屬含量與光譜反射率進行模型擬合,常用的統計模型包括偏最小二乘回歸(PLSR)[17-18]、多元逐步回歸(MSR)[19]、多元線性回歸(MLR)[31]等方法,MLR和MSR可以用于建立重金屬含量與光譜特性之間的線性關系,當變量自相關的時候,則需要PLSR來解釋,PLSR可以認為是回歸分析、主成分分析、相關性分析的綜合,通常應用于測量重金屬豐度[32]。此外,一些非線性的數學統計方法如人工神經網絡(ANN)[25]、支持向量機法(SVM)[33]、決策樹法(DT)、超限學習機(ELM)[34]等,也被廣泛應用于反演中。現將文獻[19,27-28,34]中,利用無人機高光譜影像反演重金屬含量成果總結見表1。
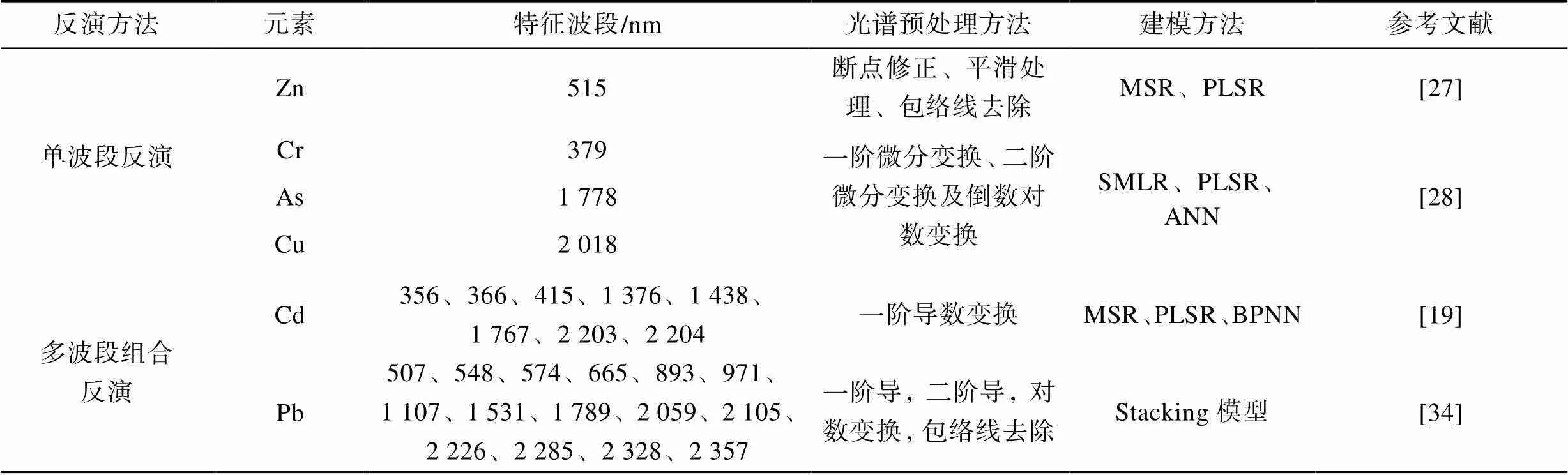
表1 單波段反演重金屬文獻總結
綜上所述,通過構建重金屬含量與光譜的相關關系模型反演重金屬含量的方法可行。因為光譜數據的采集會受各種各樣因素的影響,如大氣吸收和散射、土壤含水量和粒徑、植被覆蓋、凋落物等[35],利用光譜數據反演土壤重金屬的含量具有很大的挑戰性,因此,在進行反演時,選擇合適的波段和建模方法至關重要。根據重金屬的吸附和聚集過程,重金屬的聚集受到多種因素綜合影響,如氧化錳、二氧化硅、氧化鋁、有機質和離子環境等,單一條件下的預測仍有其局限性。現有研究表明,隨著地表類型的復雜化,重金屬反演精度越來越低[25],故在地形復雜地區的可行性還有待進一步研究。
1.2 土壤含水率
土壤含水率作為土壤重要的理化性質之一,直接影響作物生長,對土壤水分進行實時、準確監測,有利于農作物管理和提高水資源利用率。土壤水分監測方法主要有傳統測定方法和遙感監測方法。傳統測定方法有烘干稱重法、張力計法、電阻法、中子法[36]等,需要在實驗室測定,雖然精度高但測定范圍有限,工作量大,難以滿足大范圍的監測要求[37]。遙感技術利用特定波段下土壤反射率與土壤水分的關系對土壤含水率進行估算。常用到的遙感波段有可見光–近紅外[38]、熱紅外[39]和微波[40]。雖然上述方法能大范圍監測土壤含水率,但存在精度低、時效性差、成本高等問題。無人機遙感技術具有靈活性強、分辨率高、采集數據速度快等優點,正好彌補了傳統檢測方法和衛星遙感監測的不足。
研究表明,土壤水分與土壤光譜反射率呈負相關關系,具有較高反射率的土壤較為干燥,而熱紅外反射率隨土壤含水率的增加而增加,呈正相關關系[39]。無人機遙感監測方法一般有2種,其一是基于熱紅外影像通過熱慣量法和土壤水分指數法反演土壤含水率。土壤熱慣量是引起土壤表層溫度變化的內在因素,與土壤含水量有著密切聯系,同時又控制著土壤溫度日較差的大小。土壤水分較大時,土壤具有較大的熱慣量。在實際應用當中,熱慣量常用ATI表示,公式如下[41]:

土壤水分指數法則是利用無人機搭載輕型熱相機和RGB相機等,獲得復合地表溫度和彩色圖像,得到地表–空氣溫差圖、歸一化紅綠差值指數(NGRDI)、水分虧缺指數(WDI)等,建立土壤含水量預測模型,并用計算出的指數繪制水分缺失圖,分析土壤水分分布情況[42]。上述參數的計算方法如下:
其二是直接利用土壤反射率與實測土壤含水率建立相關關系進行反演,或利用土壤光譜反射率提取的參數與實測土壤水分含量的相關關系來建立反演模型,如歸一化光譜斜率吸收指數(NSSAI)[37]、增強性植被指數(EVI)[42]、垂直干旱指數(PDI)[43]等。張智韜等[44]、王海峰等[45]通過野外采樣、室內理化分析、光譜數據的采集和處理等一系列工作,利用無人機搭載多光譜相機采集6個波段(490、550、680、720、800、900 nm)的土壤光譜反射率,每次拍攝完后使用稱量法測量土壤含水率,再利用偏最小二乘回歸法、逐步回歸法和嶺回歸法的一元回歸模型建立土壤含水率與光譜反射率的相關回歸模型。也有學者使用Spequoia多光譜相機和ECH2O土壤水分傳感器采集4個波段(550、660、735、790 nm)的土壤光譜反射率和土壤含水率數據,結合PLSR、嶺回歸法、BP神經網絡3種方法建立土壤含水率反演模型[46],為礦區地表土壤水分監測提供理論依據和實踐應用參考。以上光譜參數的計算方法如下:
式中:為土壤基線的斜率,土壤基線是近紅外和紅波段范圍內土壤光譜變化近似的曲線。
綜上所述,無人機遙感監測技術獲取土壤水分是基于土壤表面的遙感數據,通過研究遙感數據與土壤水分的關系,建立土壤水分與遙感數據的關系模型來反演土壤水分信息,近些年來應用無人機監測逐漸增多,但針對于礦區土壤含水率反演的研究還較少,并且對土壤水分進行估算時考慮的影響因素較少,如未考慮植被、土地利用類型等。
1.3 土壤含鹽量
土壤鹽漬化是指土壤底層或地下水的鹽分隨毛管上升到地表,水分蒸發后,使鹽分積累在表層土壤中的過程,是自然因素和人為因素綜合作用的結果。及時準確地獲取土壤鹽分的空間分布及時空演變規律對防止土壤鹽漬化、提高農作物生產力具有指導意義。傳統土壤含鹽量的測定方法是測定土壤的電導率,需要現場定點采樣和實驗室分析。此類方法雖測量精度較高,但費時費力,難以實現大尺度、實時、動態地檢測土壤鹽分信息。近些年,隨著遙感技術的快速發展,具有綜合、宏觀等特點的衛星遙感及便攜式地物光譜儀等遙感技術已被廣泛應用。但衛星遙感和便攜式地物光譜儀自身存在缺點,如衛星遙感有重返周期長、分辨率分布不均勻等缺點[47],便攜式地物光譜儀只適用于小范圍的土壤鹽分含量監測。馮文哲等[48]將實測含鹽量與無人機、GF-1衛星2種數據的光譜特征因子進行相關性分析,利用MLR、SR、RR分別對2種數據進行建模反演,驗證了利用無人機數據進行反演精度高,效果好。無人機遙感技術同時避免了衛星遙感和便攜式地物光譜儀的缺點,具有較大的覆蓋面積和可觀的數據,為土壤鹽漬化監測提供了新的可能。
目前,土壤鹽分反演模型常借助數學模型來構建,包括以下步驟:① 光譜波段的提取;②光譜指數的建立;③變量的確定;④定量反演模型的建立。由于土壤中化學元素的吸收光譜不同,一些主要鹽離子(Na+、Cl–)與光譜反射率存在一定程度的相關關系,因此,利用可見光和近紅外光譜可以在一定程度上反演土壤鹽離子,得到土壤鹽分信息。借助遙感光譜探測土壤鹽度的方法有2種,在植被覆蓋度低或鹽漬化較為嚴重的裸土地區,可利用無人機與高光譜儀、多光譜相機獲得的光譜影像,提取光譜信息,建立鹽分指數,定量描述土壤鹽度信息。常用于表征土壤鹽漬化的鹽分指數包括:鹽度指數(Salinity Index, SI)[49]、歸一化鹽度指數(Normalized Difference Salinity Index, NDS)[50]等。鹽漬化土壤因其鹽分含量超過正常閾值進而影響植被的生理參數,因此出現紅光波段反射率增加,近紅外波段反射率降低的現象,鑒于此,有諸多學者在植被覆蓋度較高的地區利用植被光譜信息,間接預測土壤中鹽分含量。涉及的植被指數例如歸一化植被指數(Normalized Difference Vegetation Index,NDVI)[51]、增強性植被指數(Enhanced Vegetation Index,EVI)[52]、土壤調節植被指數(Soil-Adjusted Vegetation Index,SAVI)[53]等,以上植被指數都已被證明可以有效地表征植被光譜與土壤含鹽量的相關關系,具體鹽分指數與植被指數計算方式見表2。
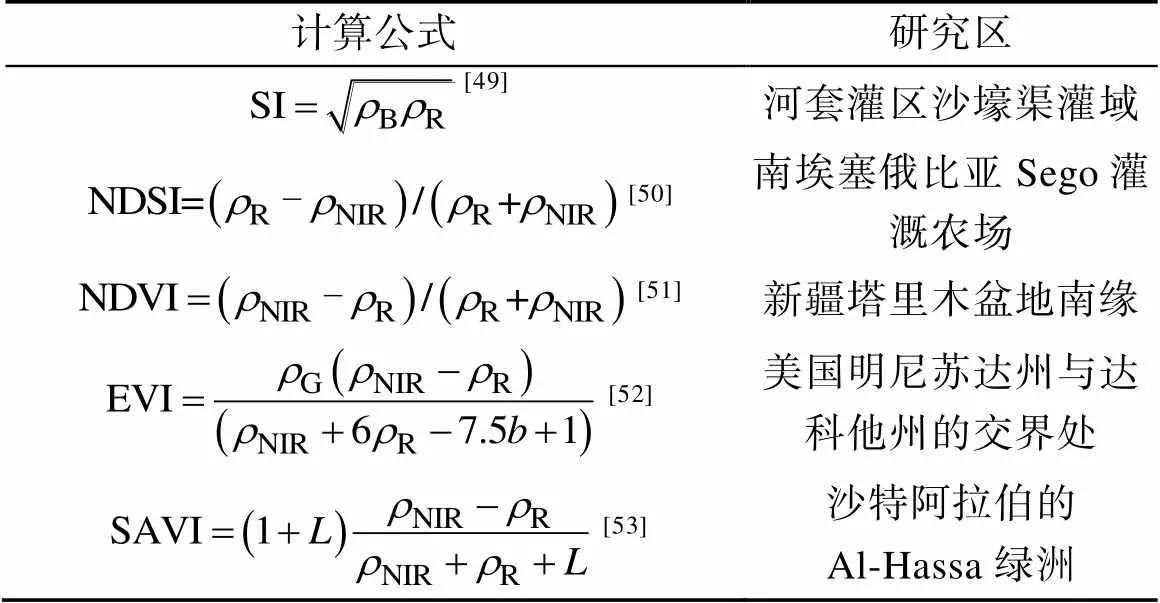
表2 用于土壤含鹽量監測的鹽分指數與植被指數
注:、、、分別為綠光、紅光、近紅外和藍光波段光譜反射率;為蓋度背景調節因子,取0.5。
在利用光譜指數建立土壤反演預測模型過程中,會產生多余的信息,可利用變量選擇的方法對冗余信息進行篩選,從而達到提高模型預測精度的目的。確定敏感變量的方法主要有變量投影重要性分析、灰度關聯分析、逐步回歸分析、連續投影算法等,其中變量投影重要性分析是基于PLSR法的一種變量篩選方法,通過計算VIP得分確定變量的重要性,實現自變量的排序[54];灰度關聯分析法根據各因素之間發展趨勢的相似程度或差異程度來衡量各因素之間相關性的一種方法[55];逐步回歸分析是根據自變量對因變量的作用和顯著程度,剔除無價值的波段[56],這3種方法目前被證明可以有效篩選模型輸入變量。包括PLSR在內的線性回歸方程是目前常用于估算土壤含鹽量的數理統計模型,但實際上,光譜變量與土壤含鹽量很少線性相關,因此引入機器學習算法,如反向傳播神經網絡(BPNN)、支持向量回歸(SVR)、隨機森林(RF)、極限學習機(ELM)和多元混合回歸模型等。魏廣飛[54]、王海峰[56]、張智韜等[57]的研究發現,同一模型在不同變量篩選方法下,預測精度會相差很大,且選取的參數并不一定是適宜模型的最優參數。所以,在減少數據冗余度、降低模型復雜度、拓展模型普適性的基礎上,提高模型的反演精度和運算效率等方面仍有很大的探索空間。
2 地質災害監測
2.1 地表塌陷
煤炭地下開采破壞煤層覆巖原有的應力平衡狀態,導致覆巖從下至上產生垮落、裂隙和彎曲下沉,表現為采空區上方地表發生大面積沉陷。目前,針對無人機監測采煤礦區地表沉陷的研究已取得很多成果。
地表沉陷的監測流程:首先根據煤礦的地形和地表沉陷特征確定測量點和控制點的布設方案,然后在研究區內均勻地布設地表沉陷監測標志點,外業采集及內業處理點云數據;其次進行地面數字模型的構建;最后對多期建模數據進行疊加分析,獲取地表沉陷的精細特征,確定地表移動下沉情況[58]。通常在無人機上搭載激光雷達,對礦區地面的周期性掃描可得到采煤沉陷區高精度、高分辨率的點云數據,經過濾波和插值處理,得到數字高程模型(DEM),通過對多期DEM進行疊加可得數字高程變化模型,即沉陷DEM。現常用的點云插值方法有專業化數字高程模型插值(ANU-DEM)、反距離權重插值(IDW)、克里金插值(Kriging)、自然鄰域插值(NN)、樣條函數插值(Spline)、改進謝別德插值算法(SPD)、徑向基函數插值算法(RBF)、局部多項式插值算法等[59-61]。在構建DEM時,通常使用濾波技術分離點云地面點,理論依據是基于鄰近腳點的高程突變。根據濾波的算法原理不同可以將其分成基于坡度、曲面擬合、分割、不規則三角網、形態學及機器學習的濾波算法6大類[62-64]。
無人機攝影測量技術和機載LiDAR技術作業時受儀器精度、地形特征、操作者經驗等多種影響,獲取的點云數據通常含有大量的噪聲點,會嚴重影響濾波的準確性和分類結果。點云數據的去噪方法主要包含網格化去噪和模型去噪2種方法。網格化去噪是利用網格把點云數據進行分割,能提高去噪的效率,但是需要重建網格,并且在去噪過程中,需要重新建立網格的原有拓撲信息,極大地增加了算法的復雜度,在一定的程度上可能還會導致重建的網格出現拓撲信息錯誤。模型去噪是直接利用去噪方法對點云數據進行去噪,可以有效地防止網格出現拓撲信息錯誤的情況。對于點云去噪,現階段還是以濾波為主。近年來,有許多學者在研究點云的基礎上提出許多去噪方法,如對比高程均值離差去噪方法[65]、自適應移動盒子去噪算法[65]、基于法向量為特征向量的網格去噪方法[66]、基于小波閾值的沉陷模型去噪[67]、移動最小二乘曲面算法[72]、各向異性消噪算法[68],以及統計濾波、半徑濾波和快速雙邊濾波結合的去噪算法[69]等。
利用多期DEM的疊加分析,不僅能得到數字高程變化模型,計算出礦區的地表移動變形參數,還能提取出礦區開采沉陷邊界,得到礦區地表沉陷的影響范圍。Xu Xianlei等[70]介紹了一種確定采煤沉陷破壞耕地邊界的新方法和評價準則,認為邊界可以45 mm下沉線或大于0.5的附加坡度確定;侯恩科等[71]、高冠杰等[72]通過對比工作面采前和采后的地表高程差,進行地表沉降量計算與成圖;Zhou Dawei等[73]也利用無人機攝影技術對開采引起的地表動態沉陷盆地進行監測并提出獲得短期開采沉陷參數的方法,已經成功應用于內蒙古王家莊煤礦。
綜上,無人機在監測礦區災害方面對不易到達和飛行困難地區的高分辨率影像獲取具有明顯優勢。隨著無人機數據處理效率和精度的不斷提高,無人機監測技術將成為礦山地表沉陷監測的新型主流監測技術,具有很好的推廣價值。
2.2 地裂縫
采煤引起的地表塌陷是礦區地表移動變化的一種外在表現形式,而地裂縫是煤礦區最常見、最直觀的一種地面塌陷形式之一。監測地表裂縫的手段包括早期的人工野外裂縫填圖、布置觀測線、觀測點[74-75]、衛星遙感[76]、三維激光掃描[77]、InSAR/SAR[78]、無人機監測技術[79-80]等。相比于其他技術,無人機遙感具有成本低、效率高、精度較高、機動靈活等優點,已被多次應用于地面塌陷調查中。現階段,利用無人機監測地裂縫的研究,主要集中在對地裂縫發育規律、分布特征的研究。侯恩科等[81]以羊場灣煤礦為研究區,總結分析該區地表裂縫發育規律、特征及其與采礦地質條件的關系;毛崔磊[82]采用谷歌遙感影像數據與無人機數據的結合,對平朔礦區歷年地裂縫的分布情況進行提取,從時間維度分析采煤地裂縫的線密度和長度,從空間維度利用分形理論對采煤地裂縫進行分析,定量化描述地裂縫的發育情況。
基于無人機遙感影像提取地裂縫的處理流程為:影像預處理、地裂縫初提取、“非地裂縫”目標去除、地裂縫結果精處理以及地裂縫提取結果精度評定。地裂縫初提取常用方法有邊緣檢測算法、灰度閾值分割算法、影像分類算法[83]。邊緣檢測算法是一種采用把邊緣檢測算子增強影像中邊緣信號的數字處理方法,可分為一階邊緣檢測算法和二階邊緣檢測算法[84]。典型的邊緣檢測算子包括Roberts算子、Sobel算子、Prewitt算子和Canny算子、拉普拉斯算子和高斯拉普拉斯算子等[85]。遙感影像分類是從光譜和紋理信息豐富,各個類別之間對比度存在較大差異的遙感影像中提取條帶狀線性目標的一種方法。影像分類方法有最大似然分類法、最小距離分類法、決策樹分類法、均值分類法和ISODATA分類法等[86]。基于機器學習和神經網絡等的遙感影像分類方法是近幾年的研究熱點。
對于有些非裂縫信息被誤提取的問題,可采用針對遙感影像植被分類的算法如最鄰近距離法、決策樹法、隨機森林法(Random Forests,RF)等生成掩膜文件,消除植被影響,實現裂縫的精提取。2015年,Feng Quanlong等[87]證明了結合紋理信息的隨機森林算法能有效地對植被進行分類,其結果比最鄰近距離、面向對象以及SVM等算法更優。故大部分研究采用RF算法制成掩膜文件,去除非地表裂縫信息。由于地裂縫的灰度值并不隨地裂縫位置的變化而均勻變化,且地裂縫初提取和非地裂縫目標去除過程以單個像元為操作對象,因此,地裂縫的最終提取結果會存在一定的斷續現象,除了明顯的地裂縫圖斑之外,結果中還含有一些面積遠小于地裂縫的碎小圖斑,影響提取精度和地裂縫的判別,故應對地裂縫提取結果進行精處理。數學形態學中的閉運算、擊中擊不中變換算法具有連接二值影像中斷裂目標的功能[88-89],開運算和面積濾波算法可進行碎小圖斑去除[90],可用于地裂縫精處理研究。
綜上,無人機能全面準確地展現地表裂縫的分布特征與發育規律。但在后期的影像處理方面,地裂縫的提取受植被覆蓋度及地裂縫陰影的影響,斷續現象增加。為此,可結合采動裂縫發育規律及裂縫圖像的灰度特征,構建斷續裂縫的自動生成算法。同時,針對隱性地裂縫,其灰度差異性變小,可結合實地調查及這種裂縫的其他光譜特征進行解譯,以實現采動裂縫的高效監測與自動獲取。
2.3 邊坡穩定性
露天礦開采過程中,礦山極易發生邊坡失穩,導致滑坡、崩塌、泥石流等地質災害,其形成原因主要是位于不穩定邊坡上的巖土體在降雨、采煤擾動等條件下,受自身重力及其他應力的綜合影響下沿著傾斜面發生滑動或崩塌。由于其分布廣泛、發生頻繁、形成原因以及變形機理復雜、很難進行人為調查,現常使用無人機監測邊坡的穩定性,了解滑坡情況[91-92]。從工程塌方和山嶺地區滑坡的防災減災角度,邊坡的監測技術可以大致分為邊坡的位移監測、加固體的支擋物監測、巖體破裂監測、水的監測和巡檢5個主要類型。
國內外利用無人機對邊坡穩定性的研究主要集中在邊坡的位移監測和巖體破裂監測上。基于計算機視覺和圖像處理技術對無人機獲取的圖像進行處理,探討邊坡斜體邊緣的提取方法,可實現邊坡穩定的可視化,從而評估邊坡的位移情況[93]。利用無人機攝影測量技術獲得邊坡表面地形和裂隙圖像,通過基于面向對象分析的濾波算法及濾波后圖像的后處理技術,可對邊坡裂縫發育和失穩趨勢進行預測[89]。宋誠[94]通過無人機攝影測量技術實現對邊坡地形高精度測量,并將其成功應用于邊坡變形監測中,為邊坡治理提供了依據。無人機監測主要是利用無人機攝影測量技術,獲取礦區數據,利用三維點云處理軟件對模型進行裁剪、去噪、平滑等處理,其次利用三維建模軟件實現可視化,進而分析邊坡穩定性。
目前,邊坡穩定性分析的確定性分析常用方法主要有極限平衡法和數值模擬法2種,極限平衡法是以Mohr-Coulomb的抗剪強度理論為基礎,根據斜坡上滑體的力學平衡原理分析斜坡的受力狀態,以及斜坡抗滑力與下滑力之間的關系來評價斜坡的穩定性[95]。靳遠成等[96]采用此方法從無人機飛行數據三維建模結果截取多個剖面后進行數值分析,結果表明:將無人機影像的邊坡精細化建模技術應用于邊坡穩定性分析,可以更快速地反映邊坡穩定性情況。數值模擬方法主要是通過無人機影像后期處理獲得的三維數據通過有限元軟件ANSYS、ABAQUS、NASTRAN、FLAC3D等進行計算[97]。金愛兵等[98]利用無人機攝影測量技術,獲得邊坡測量數據,將DEM與FLAC數值模型結合,達到高精度高效率分析邊坡穩定性的目的。
無人機攝影測量技術具有成本低、操作簡便、精度高等優點,可作為邊坡穩定性監測手段在礦區監測中進行推廣使用。但目前所使用的位移測量方法,在精度的穩定性上仍存在不足,原因是無人機影像受風速影響,每次所拍攝的相片質量存在差異,因此,如何保證獲取圖像質量的穩定性是亟待解決的問題。
3 結論與展望
a.無人機因可操作性強,低成本和采集數據速度快,可以在人員難以進入的地區獲取數據等優點在礦業領域有極大的研究潛力和應用前景。目前無人機在礦區生態環境中的監測應用仍處于初步階段,設計符合監測需求的方案,選擇合適的傳感器,得到高分辨率圖像,根據數據處理結果作出評價仍是未來研究的熱點話題。
b.監測地表土壤特征時,雖然建模精度較高,但隨著地表類型、植被種類、復墾管理方式等的不同,反演精度會發生較大變化,容易受到多種因素的綜合影響,單一條件下反演預測仍有局限性。另外,上述模型大多基于平原、丘陵或縣域等自然狀態土壤進行模型開發,針對采煤礦區土壤質量演化趨勢模型方面的研究較少,未來有待進一步研究。
c.在礦區地質災害研究方面,由于無人機能高精度、高頻率、多角度地持續動態監測地質災害情況,被廣泛應用于研究地表塌陷、地裂縫的形成機理與發育規律以及采礦擾動對土壤質量變化的影響規律等方面。但目前少有研究利用無人機監測不同程度地質災害對土壤質量的影響,也未將這些變化與采礦參數、地表移動變形和地表裂縫分布聯系起來,今后可從這方面尋求突破。
d.未來可通過集成野外時序跟蹤調查、高精度土壤質量監測技術、高空間分辨率無人機監測技術、數字模擬手段和典型工作面的試驗監測與分析,研究工作面自切眼至終采線動態推進中地質災害與土壤質量演化耦合關系,構建采煤沉陷區土壤質量演化預測理論體系和時序演變模型,進一步探討基于無人機高光譜影像的表土元素反演,提出減緩、控制及提升礦區土壤質量的措施,為我國煤炭生產基地煤炭資源開采與生態環境的協調可持續發展提供技術支撐。
[1] 胡振琪,肖武. 關于煤炭工業綠色發展戰略的若干思考:基于生態修復視角[J]. 煤炭科學技術,2020,48(4):35–42.
HU Zhenqi,XIAO Wu. Some thoughts on green development strategy of coal industry:From aspects of ecological restoration[J]. Coal Science and Technology,2020,48(4):35–42.
[2] 文博杰,陳毓川,王高尚,等. 2035年中國能源與礦產資源需求展望[J]. 中國工程科學,2019,21(1):68–73.
WEN Bojie,CHEN Yuchuan,WANG Gaoshang,et al. China’s demand for energy and mineral resources by 2035[J]. Engineering Sciences,2019,21(1):68–73.
[3] 王丹爽. 無人機技術在施工現場安全評價中的應用研究[D]. 哈爾濱:哈爾濱工業大學,2017.
WANG Danshuang. Application of UAV technology in construction site safety evaluation[D]. Harbin:Harbin Institute of Technology,2017.
[4] 張凱,李全生,戴華陽,等. 礦區地表移動“空天地”一體化監測技術研究[J]. 煤炭科學技術,2020,48(2):207–213.
ZHANG Kai,LI Quansheng,DAI Huayang,et al. Research on integrated monitoring technology and practice of “space-sky-ground” on surface movement in mining area[J]. Coal Science and Technology,2020,48(2):207–213.
[5] 姚一飛. 基于北斗增強的實時PPP及在礦山地表監測的研究[D].徐州:中國礦業大學,2017.
YAO Yifei. Research on real-time precise point positioning based on Beidou augmentation and its application in mining surface monitoring[D]. Xuzhou:China University of Mining and Technology,2017.
[6] 仝云霄. InSAR礦區地表形變監測及大氣延遲校正研究[D]. 徐州:中國礦業大學,2020.
TONG Yunxiao. Study on surface deformation monitoring in mining area and atmospheric delay correction of InSAR[D]. Xuzhou:China University of Mining and Technology,2020.
[7] 廉旭剛,蔡音飛,胡海峰. 我國礦山測量領域三維激光掃描技術的應用現狀及存在問題[J]. 金屬礦山,2019(3):35–40.
LIAN Xugang,CAI Yinfei,HU Haifeng. Application status and existing problems of 3D laser scanning technique in mine surveying in China[J]. Metal Mine,2019(3):35–40.
[8] 徐坤,屈瑩,王寶山. 傾斜攝影測量技術在礦產資源監測中的應用[J]. 測繪工程,2020,29(4):38–43.
XU Kun,QU Ying,WANG Baoshan. Application of oblique photogrammetry technology to the dynamic monitoring of mineral resources[J]. Engineering of Surveying and Mapping,2020,29(4):38–43.
[9] 王昆,楊鵬,呂文生,等. 無人機遙感在礦業領域應用現狀及發展態勢[J]. 工程科學學報,2020,42(9):1085–1095.
WANG Kun,YANG Peng,LYU Wensheng,et al. Current status and development trend of UAV remote sensing applications in the mining industry[J]. Chinese Journal of Engineering,2020,42(9):1085–1095.
[10] 白洋,康會濤,張文超,等. 無人機在露天礦山監測中的應用[J]. 測繪通報,2020(9):85–88.
BAI Yang,KANG Huitao,ZHANG Wenchao,et al. Application of UAV in open-pit mine monitoring[J]. Bulletin of Surveying and Mapping,2020(9):85–88.
[11] 許吉仁,董霽紅,楊源譞,等. 基于支持向量機的礦區復墾農田土壤–小麥鎘含量高光譜估算[J]. 光子學報,2014,43(5):1–8.
XU Jiren,DONG Jihong,YANG Yuanxuan,et al. Support vector machine model for predicting the cadmium concentration of soil-wheat system in mine reclamation farmland using hyperspectral data[J]. Acta Photonica Sinica,2014,43(5):1–8.
[12] LIU Meiling,LIU Xiangnan,WU Ling,et al. Wavelet-based detection of crop zinc stress assessment using hyperspectral reflectance[J]. Computers and Geosciences,2011,37(9):1254–1263.
[13] ROMAN M B,SERGEY V S. Variable selection in near-infrared spectroscopy:Benchmarking of feature selection methods on biodiesel data[J]. Analytica Chimica Acta,2011,692(1):63–72.
[14] 葉元元. 多金屬礦區土壤重金屬的高光譜定量估算研究[D]. 徐州:中國礦業大學,2014.
YE Yuanyuan. Quantitative estimating of soil heavy metals with hyper-spectrum in polymetallic mining areas[D]. Xuzhou:China University of Mining and Technology,2014.
[15] 王惠敏. 基于光譜吸收特征的土壤有機質與重金屬含量估算研究[D]. 徐州:中國礦業大學,2019.
WANG Huimin. Study on the estimation of soil organic matter and heavy metal contents based on spectral absorption characteristics[D]. Xuzhou:China University of Mining and Technology,2019.
[16] 譚琨,葉元元,杜培軍,等. 礦區復墾農田土壤重金屬含量的高光譜反演分析(英文)[J]. 光譜學與光譜分析,2014,34(12):3317–3322.
TAN Kun,YE Yuanyuan,DU Peijun,et al. Estimation of heavy metal concentrations in reclaimed mining soils using reflectance spectroscopy(English)[J]. Spectroscopy and Spectral Analysis,2014,34(12):3317–3322.
[17] ZHANG Shiwen,SHEN Qiang,NIE Chaojia,et al. Hyperspectral inversion of heavy metal content in reclaimed soil from a mining wasteland based on different spectral transformation and modeling methods[J]. Spectrochimica Acta Part A:Molecular and Biomolecular Spectroscopy,2019,211:393–400.
[18] 鄔登巍,吳昀昭,馬宏瑞. 基于中紅外漫反射光譜的土壤重金屬元素含量預測研究[J]. 光譜學與光譜分析,2010,30(6):1498–1502.
WU Dengwei,WU Yunzhao,MA Hongrui. Study on the prediction of soil heavy metal elements content based on mid-infrared diffuse reflectance spectra[J]. Spectroscopy and Spectral Analysis,2010,30(6):1498–1502.
[19] 左玲. 黑土區土壤重金屬高光譜遙感監測方法探究[D]. 北京:中國地質大學(北京),2020.
ZUO Ling. Research on hyperspectral remote sensing monitoring method of heavy metals in black soil region[D]. Beijing:China University of Geosciences(Beijing),2020.
[20] ARAúJO S R,DEMATTê J A M,VICENTE S. Soil contaminated with chromium by tannery sludge and identified by vis-NIR-mid spectroscopy techniques[J]. International Journal of Remote Sensing,2014,35(10):3579–3593.
[21] URSZULA S,LAKHMI C J. Feature selection for data and pattern recognition[M]. Heidelberg:Springer,2015.
[22] JAIN A,ZONGKER D. Feature selection:Evaluation,application,and small sample performance[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(2):153–158.
[23] YU Lei,LIU Huan. Efficient feature selection via analysis of relevance and redundancy[J]. The Journal of Machine Learning Research,2004:1205–1224.
[24] 劉英. 半干旱煤礦區受損植被引導型恢復研究[D]. 徐州:中國礦業大學,2020.
LIU Ying. Study on guided restoration of damaged vegetation in semi-arid coal mine area[D]. Xuzhou:China University of Mining and Technology,2020.
[25] 胡忠正. 機載高光譜影像反演土壤重金屬含量的經驗模型選擇與特征提取[D]. 北京:中國地質大學(北京),2019.
HU Zhongzheng. Empirical model selection and feature extraction for retrieving soil heavy metal concentration from airborne hyperspectral imagery[D]. Beijing:China University of Geosciences(Beijing),2019.
[26] BRUCE L M,KOGER C H,LI Jiang. Dimensionality reduction of hyperspectral data using discrete wavelet transform feature extraction[J]. IEEE Transactions on Geoscience and Remote Sensing,2002,40(10):2331–2338.
[27] 宋婷婷. 土壤重金屬含量反演與礦區環境遙感監測與評價研究[D]. 北京:北京化工大學,2017.
SONG Tingting. Study on inversion of heavy metal content in soil and remote sensing monitoring and evaluation of mine environment[D]. Beijing:Beijing University of Chemical Technology,2017.
[28] 徐良驥,李青青,朱小美,等. 煤矸石充填復墾重構土壤重金屬含量高光譜反演[J]. 光譜學與光譜分析,2017,37(12):3839–3844.
XU Liangji,LI Qingqing,ZHU Xiaomei,et al. Hyperspectral inversion of heavy metal content in coal gangue filling reclamation land[J]. Spectroscopy and Spectral Analysis,2017,37(12):3839–3844.
[29] 宋練,簡季,譚德軍,等. 萬盛采礦區土壤As,Cd,Zn重金屬含量光譜測量與分析[J]. 光譜學與光譜分析,2014,34(3):812–817.
SONG Lian,JIAN Ji,TAN Dejun,et al. Estimation of soil’s heavy metal concentrations(As,Cd and Zn)in Wansheng mining area with geochemistry and field spectroscopy[J]. Spectroscopy and Spectral Analysis,2014,34(3):812–817.
[30] 徐明星,吳紹華,周生路,等. 重金屬含量的高光譜建模反演:考古土壤中的應用[J]. 紅外與毫米波學報,2011,30(2):109–114.
XU Mingxing,WU Shaohua,ZHOU Shenglu,et al. Hyperspectral reflectance models for retrieving heavy metal content:Application in the archaeological soil[J]. Journal of Infrared and Millimeter Waves,2011,30(2):109–114.
[31] FILZMOSER P,TODOROV V. Review of robust multivariate statistical methods in high dimension[J]. Analytica Chimica Acta,2011,705(1/2):2–14.
[32] ZHANG Xia,HUANG Changping,LIU Bo,et al. Inversion of soil Cu concentration based on band selection of hyperspetral data[C]//2010 IEEE International Geoscience and Remote Sensing Symposium. New York:IEEE,2010:3680–3683.
[33] THISSEN U,PEPERS M,üSTüN B,et al. Comparing support vector machines to PLS for spectral regression applications[J]. Chemometrics and Intelligent Laboratory Systems,2004,73(2):169–179.
[34] 馬偉波,譚琨,李海東,等. 基于超限學習機的礦區土壤重金屬高光譜反演[J]. 生態與農村環境學報,2016,32(2):213–218.
MA Weibo,TAN Kun,LI Haidong,et al. Hyperspectral inversion of heavy metals in soil of a mining area using extreme learning machine[J]. Journal of Ecology and Rural Environment,2016,32(2):213–218.
[35] WANG Fenghe,GAO Jay,ZHA Yong. Hyperspectral sensing of heavy metals in soil and vegetation:Feasibility and challenges[J]. ISPRS Journal of Photogrammetry and Remote Sensing,2018,136:73–84.
[36] MORTEZA S,SCOTT B J,WILLIAM D P. A linear physically-based model for remote sensing of soil moisture using short wave infrared bands[J]. Remote Sensing of Environment,2015,164:66–76.
[37] 鄭小坡,孫越君,秦其明,等. 基于可見光–短波紅外波譜反射率的裸土土壤含水量反演建模[J]. 光譜學與光譜分析,2015,35(8):2113–2118.
ZHENG Xiaopo,SUN Yuejun,QIN Qiming,et al. Bare soil moisture inversion model based on visible-shortwave infrared reflectance[J]. Spectroscopy and Spectral Analysis,2015,35(8):2113–2118.
[38] 郭輝,卜小東,黃可京,等. 基于熱紅外遙感影像的玉米田間土壤水分反演研究[J]. 中國農機化學報,2020,41(10):203–210.
GUO Hui,BU Xiaodong,HUANG Kejing,et al. Inversion of soil moisture in corn field based on thermal infrared remote sensing image[J]. Journal of Chinese Agricultural Mechanization,2020,41(10):203–210.
[39] 李伯祥,陳曉勇. 基于Sentinel多源遙感數據的河北省景縣農田土壤水分協同反演[J]. 生態與農村環境學報,2020,36(6):752–761.
LI Boxiang,CHEN Xiaoyong. Synergic use of Sentinel-1 and Sentinel-2 images for soil moisture retrieval in vegetation covered agricultural areas of Jingxian County of Hebei Province[J]. Journal of Ecology and Rural Environment,2020,36(6):752–761.
[40] 夏軍. 準東煤田土壤重金屬污染高光譜遙感監測研究[D]. 烏魯木齊:新疆大學,2014.
XIA Jun. Study on the monitoring of soil heavy metal pollution with hyperspectral remote sensing in the Eastern Junggar Coalfield[D]. Urumqi:Xinjiang University,2014.
[41] HOFFMANN H,JENSEN R,THOMSEN A,et al. Crop water stress maps for entire growing seasons from visible and thermal UAV imagery[J]. Biogeosciences Discussions,2016,13(24):316.
[42] 夏權,夏萍,陳黎卿,等. 基于多光譜遙感的土壤含水量定量監測與分析[J]. 安徽農業大學學報,2015,42(3):439–443.
XIA Quan,XIA Ping,CHEN Liqing,et al. Quantitative analysis of the soil moisture content based on multispectral remote sensing data[J]. Journal of Anhui Agricultural University,2015,42(3):439–443.
[43] 馮珊珊,梁雪映,樊風雷,等. 基于無人機多光譜數據的農田土壤水分遙感監測[J]. 華南師范大學學報(自然科學版),2020,52(6):74–81.
FENG Shanshan,LIANG Xueying,FAN Fenglei,et al. Monitoring of farmland soil moisture based on unmanned aerial vehicle multispectral data[J]. Journal of South China Normal University(Natural Science Edition),2020,52(6):74–81.
[44] 張智韜,王海峰,韓文霆,等. 基于無人機多光譜遙感的土壤含水率反演研究[J]. 農業機械學報,2018,49(2):173–181.
ZHANG Zhitao,WANG Haifeng,HAN Wenting,et al. Inversion of soil moisture content based on multispectral remote sensing of UAVs[J]. Transactions of the Chinese Society of Agricultural Machinery,2018,49(2):173–181.
[45] 王海峰,張智韜,付秋萍,等. 低空無人機多光譜遙感數據的土壤含水率反演[J]. 節水灌溉,2018(1):90–94.
WANG Haifeng,ZHANG Zhitao,FU Qiuping,et al. Inversion of soil moisture content based on multispectral remote sensing data of low altitude UAV[J]. Water Saving Irrigation,2018(1):90–94.
[46] 王啟元,趙艷玲,房鑠東,等. 基于多光譜遙感的裸土土壤含水量反演研究[J]. 礦業科學學報,2020,5(6):608–615.
WANG Qiyuan,ZHAO Yanling,FANG Shuodong,et al. Inversion of soil moisture in bare soil based on multi-spectral remote sensing[J]. Journal of Mining Science and Technology,2020,5(6):608–615.
[47] 陳俊英,王新濤,張智韜,等. 基于無人機–衛星遙感升尺度的土壤鹽漬化監測方法[J]. 農業機械學報,2019,50(12):161–169.
CHEN Junying,WANG Xintao,ZHANG Zhitao,et al. Soil salinization monitoring method based on UAV-satellite remote sensing scale-up[J]. Transactions of the Chinese Society of Agricultural Machinery,2019,50(12):161–169.
[48] 馮文哲,王新濤,韓佳,等. 基于衛星和無人機遙感數據尺度轉換的土壤鹽漬化監測研究[J]. 節水灌溉,2020(11):87–93.
FENG Wenzhe,WANG Xintao,HAN Jia,et al. Research on soil salinization monitoring based on scale conversion of satellite and UAV remote sensing data[J]. Water Saving Irrigation,2020(11):87–93.
[49] 邊玲玲. 基于多源數據的黃河三角洲土壤鹽分提取方法研究[D]. 淄博:山東理工大學,2020.
BIAN Lingling. Study on the methods of soil salt extraction in the Yellow River Delta based on multi-source data[D]. Zibo:Shandong University of Technology,2020.
[50] ZEWDU S,SURYABHAGAVAN K V,BALAKRISHNAN M. Geo-spatial approach for soil salinity mapping in Sego Irrigation Farm,South Ethiopia[J]. Journal of the Saudi Society of Agricultural Sciences,2017,16(1):16–24.
[51] 王飛,丁建麗,伍漫春. 基于NDVI–SI特征空間的土壤鹽漬化遙感模型[J]. 農業工程學報,2010,26(8):168–173.
WANG Fei,DING Jianli,WU Manchun. Remote sensing monitoring models of soil salinization based on NDVI-SI feature space[J]. Transactions of the Chinese Society of Agricultural Engineering,2010,26(8):168–173.
[52] LOBELL D B,LESCH S M,CORWIN D L,et al. Regional-scale assessment of soil salinity in the Red River Valley using multi-year MODIS EVI and NDVI[J]. Journal of Environmental Quality,2010,39(1):35–41.
[53] AMAL A,LALIT K,YOUSEF Y A. Assessing soil salinity using soil salinity and vegetation indices derived from IKONOS high-spatial resolution imageries:Applications in a date palm dominated region[J]. Geoderma,2014(230/231):1–8.
[54] 魏廣飛. 基于無人機多光譜遙感的土壤鹽漬化監測模型研究[D].咸陽:西北農林科技大學,2020.
WEI Guangfei. Research on monitoring model of soil salinization based on multispectral remote sensing of UAV[D]. Xianyang:Northwest A&F University,2020.
[55] SANTOS I C D L,SANTOS A D,OUMAR Z,et al. Remote sensing to detect nests of the leaf-cutting Ant Atta sexdens(Hymenoptera:Formicidae) in teak plantations[J]. Remote Sensing,2019,11(14):1641.
[56] 王海峰. 基于高光譜遙感的土壤水鹽監測模型研究:以河套灌區沙壕渠灌域沙壤土為例[D]. 咸陽:西北農林科技大學,2019.
WANG Haifeng. Hyperspectral remote sensing based models for soil moisture and salinity prediction:A case study from sandy loam soil in Shahaoqu district of Hetao irrigation area[D]. Xianyang:Northwest A&F University,2019.
[57] 張智韜,魏廣飛,姚志華,等. 基于無人機多光譜遙感的土壤含鹽量反演模型研究[J]. 農業機械學報,2019,50(12):151–160.
ZHANG Zhitao,WEI Guangfei,YAO Zhihua,et al. Soil salt inversion model based on UAV multispectral remote sensing[J]. Transactions of the Chinese Society of Agricultural Machinery,2019,50(12):151–160.
[58] 張曦. 基于無人機攝影測量技術的礦區沉陷監測方法研究[D]. 邯鄲:河北工程大學,2019.
ZHANG Xi. Study on the method of subsidence monitoring in mining areas based on UAV photogrammetry technology[D]. Handan:Hebei University of Engineering,2019.
[59] 蘆家欣. 基于機載LiDAR點云的榆神礦區采煤沉陷建模[D]. 西安:西安科技大學,2020.
LU Jiaxin. Mining subsidence modeling based on airborne LIDAR point cloud in Yushen mining area[D]. Xi’an:Xi’an University of Science and Technology,2020.
[60] 楊秋麗,魏建新,鄭江華,等. 離散點云構建數字高程模型的插值方法研究[J]. 測繪科學,2019,44(7):16–23.
YANG Qiuli,WEI Jianxin,ZHENG Jianghua,et al. Comparison of interpolation methods of digital elevation model using discrete point cloud data[J]. Science of Surveying and Mapping,2019,44(7):16–23.
[61] MENG Xuelian,CURRIT N,ZHAO Kaiguang. Ground filtering algorithms for airborne LiDAR data:A review of critical issues[J]. Remote Sensing,2010,2(3):833–860.
[62] YU Jinze,WEI Mingqiang,QIN Jing,et al. Feature-preserving mesh denoising via normal guided quadric error metrics[J]. Optics and Lasers in Engineering,2014,62:57–68.
[63] 胡達,黎永索,張可能,等. Kriging點云濾波改進算法及監測試驗研究[J/OL]. 土木與環境工程學報(中英文),2021:1–12 [2021-03-12]. https: //kns.cnki.net/kcms/detail/50.1218.TU. 20210312.0940.002.html
HU Da,LI Yongsuo,ZHANG Keneng,et al. Improved Kriging point cloud filtering algorithm and monitoring experiment[J]. Journal of Civil and Environmental Engineering,2021:1–12[2021-03-12]. https: //kns.cnki.net/kcms/detail/50.1218.TU. 20210312.0940.002.html
[64] 汪文琪,李宗春,付永健,等. 一種多尺度自適應點云坡度濾波算法[J/OL]. 武漢大學學報(信息科學版),2021:1–8[2021-04-09]. https: //doi.org/10.13203/j.whugis20200016
WANG Wenqi,LI Zongchun,FU Yongjian,et al. A multi-scale adaptive slope filtering algorithm of point cloud[J]. Geomatics and Information Science of Wuhan University,2021:1–8 [2021-04-09]. https: //doi.org/10.13203/j.whugis20200016
[65] 李煉. 機載LiDAR點云濾波及分類算法研究[D]. 成都:成都理工大學,2014.
LI Lian. Researching the filtering and classification algorithms of airborne LiDAR point cloud[D]. Chengdu:Chengdu University of Technology,2014.
[66] 曲金博. 基于聚類算法的三維激光點云數據去噪方法研究[D]. 沈陽:沈陽建筑大學,2020.
QU Jinbo. Study on 3D laser point cloud data denoising method based on clustering algorithm[D]. Shenyang:Shenyang Jianzhu University,2020.
[67] 湯伏全,蘆家欣,韋書平,等. 基于無人機LiDAR的榆神礦區采煤沉陷建模方法改進[J]. 煤炭學報,2020,45(7):2655–2666.
TANG Fuquan,LU Jiaxin,WEI Shuping,et al. Improvement of mining subsidence modeling method based on UAV LiDAR in Yushen mining area[J]. Journal of China Coal Society,2020,45(7):2655–2666.
[68] 戴士杰,任永潮,張慧博. 各向異性擴散濾波的三維散亂點云平滑去噪算法[J]. 計算機輔助設計與圖形學學報,2018,30(10):1843–1849.
DAI Shijie,REN Yongchao,ZHANG Huibo. Study on smooth denoising of 3D scattered point clouds with anisotropic diffusion filtering[J]. Journal of Computer Aided Design and Computer Graphics,2018,30(10):1843–1849.
[69] 李鵬飛,吳海娥,景軍鋒,等. 點云模型的噪聲分類去噪算法[J]. 計算機工程與應用,2016,52(20):188–192.
LI Pengfei,WU Hai’e,JING Junfeng,et al. Noise classification denoising algorithm for point cloud model[J]. Computer Engineering and Applications,2016,52(20):188–192.
[70] XU Xianlei,ZHAO Yanling,HU Zhenqi,et al. Boundary demarcation of the damaged cultivated land caused by coal mining subsidence[J]. Bulletin of Engineering Geology and the Environment,2014,73(2):621–633.
[71] 侯恩科,首召貴,徐友寧,等. 無人機遙感技術在采煤地面塌陷監測中的應用[J]. 煤田地質與勘探,2017,45(6):102–110.
HOU Enke,SHOU Zhaogui,XU Youning,et al. Application of UAV remote sensing technology in monitoring of coal mining-induced subsidence[J]. Coal Geology & Exploration,2017,45(6):102–110.
[72] 高冠杰,侯恩科,謝曉深,等. 基于四旋翼無人機的寧夏羊場灣煤礦采煤沉陷量監測[J]. 地質通報,2018,37(12):2264–2269.
GAO Guanjie,HOU Enke,XIE Xiaoshen,et al. The monitoring of ground surface subsidence related to coal seams mining in Yangchangwan coal mine by means of unmanned aerial vehicle with quad-rotors[J]. Geological Bulletin of China,2018,37(12):2264–2269.
[73] ZHOU Dawei,QI Lizhuang,ZHANG Demin,et al. Unmanned Aerial Vehicle(UAV) photogrammetry technology for dynamic mining subsidence monitoring and parameter inversion:A case study in China[J]. IEEE Access,2020,8:16372–16386.
[74] 胡振琪,王新靜,賀安民. 風積沙區采煤沉陷地裂縫分布特征與發生發育規律[J]. 煤炭學報,2014,39(1):11–18.
HU Zhenqi,WANG Xinjing,HE Anmin. Distribution characteristic and development rules of ground fissures due to coal mining in windy and sandy region[J]. Journal of China Coal Society,2014,39(1):11–18.
[75] 胡青峰,崔希民,袁德寶,等. 厚煤層開采地表裂縫形成機理與危害性分析[J]. 采礦與安全工程學報,2012,29(6):864–869.
HU Qingfeng,CUI Ximin,YUAN Debao,et al. Formation mechanism of surface cracks caused by thick seam mining and hazard analysis[J]. Journal of Mining & Safety Engineering,2012,29(6):864–869.
[76] 范立民,張曉團,向茂西,等. 淺埋煤層高強度開采區地裂縫發育特征:以陜西榆神府礦區為例[J]. 煤炭學報,2015,40(6):1442–1447.
FAN Limin,ZHANG Xiaotuan,XIANG Maoxi,et al. Characteristics of ground fissure development in high intensity mining area of shallow seam in Yushenfu coal field[J]. Journal of China Coal Society,2015,40(6):1442–1447.
[77] 施展宇. 地面三維激光掃描技術在開采沉陷應用研究[D]. 西安:西安科技大學,2014.
SHI Zhanyu. Terrestrial 3D laser scanning technology application in mining subsidence[D]. Xi’an:Xi’an University of Science and Technology,2014.
[78] 劉文濤. 基于時序InSAR技術的礦區地面沉降監測與分析[D]. 西安:西安科技大學,2020.
LIU Wentao. Monitoring and analysis of land subsidence in mining area based on time series InSAR technology[D]. Xi’an:Xi’an University of Science and Technology,2020.
[79] 謝曉深,侯恩科,高冠杰,等. 寧夏羊場灣煤礦淺埋煤層開采地面塌陷發育規律及形成機理[J]. 地質通報,2018,37(12):2233–2240.
XIE Xiaoshen,HOU Enke,GAO Guanjie,et al. A study of the development regularity and formation mechanism of ground subsidence in shallow coal seam mining of Yangchangwan coal mine,Ningxia[J]. Geological Bulletin of China,2018,37(12):2233–2240.
[80] 侯恩科,張杰,謝曉深,等. 無人機遙感與衛星遙感在采煤地表裂縫識別中的對比[J]. 地質通報,2019,38(2/3):443–448.
HOU Enke,ZHANG Jie,XIE Xiaoshen,et al. Contrast application of unmanned aerial vehicle remote sensing and satellite remote sensing technology relating to ground surface cracks recognition in coal mining area[J]. Geological Bulletin of China,2019,38(2/3):443–448.
[81] 侯恩科,謝曉深,徐友寧,等. 羊場灣煤礦采動地裂縫發育特征及規律研究[J]. 采礦與巖層控制工程學報,2020,2(3):037038.
HOU Enke,XIE Xiaoshen,XU Youning,et al. Prediction of ground cracks induced by coal mining in Yangchangwan coal mine[J]. Journal of Mining and Strata Control Engineering,2020,2(3):037038.
[82] 毛崔磊. 黃土丘陵區采煤塌陷地裂縫分布特征研究[D]. 北京:中國地質大學(北京),2018.
MAO Cuilei. Study on fracture distribution characteristics of coal mining collapse in loess hilly area[D]. Beijing:China University of Geosciences(Beijing),2018.
[83] 韋博文. 基于改進的MF–FDOG算法和無人機影像提取黃土地區地裂縫[D]. 成都:西南交通大學,2018.
WEI Bowen. Extracting ground fissures in loess landform area using modified MF-FDOG algorithm and UAV images[D]. Chengdu:Southwest Jiaotong University,2018.
[84] JAIN R,KASTURI R,SCHUNCK B G. Machine vision[M]. New York:McGraw Hill,1995.
[85] 趙毅鑫,許多,孫波,等. 基于無人機紅外遙感和邊緣檢測技術的采動地裂縫辨識[J]. 煤炭學報,2021,46(2):624–637.
ZHAO Yixin,XU Duo,SUN Bo,et al. Investigation on ground fissure identification using UAV infrared remote sensing and edge detection technology[J]. Journal of China Coal Society,2021,46(2):624–637.
[86] SHRUTHI R B V,KERLE N,JETTEN V. Object-based gully feature extraction using high spatial resolution imagery[J]. Geomorphology,2011,134(3/4):260–268.
[87] FENG Quanlong,LIU Jiantao,GONG Jianhua. UAV remote sensing for urban vegetation mapping using random forest and texture analysis[J]. Remote Sensing,2015,7(1):1074–1094.
[88] HARALICK R M,STERNBERG S R,ZHUANG Xinhua. Image analysis using mathematical morphology[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1987,9(4):532–550.
[89] ANDRé S,JEAN-PHILIPPE M,NORMAN K,et al. Image-based mapping of surface fissures for the investigation of landslide dynamics[J]. Geomorphology,2013,186:12–27.
[90] BRUCE G B. Machine Vision Handbook[M]. London:Springer,2012.
[91] FRANCIONI M,SALVINI R,STEAD D,et al. An integrated remote sensing-GIS approach for the analysis of an open pit in the Carrara marble district,Italy:Slope stability assessment through kinematic and numerical methods[J]. Computers and Geotechnics,2015,67:46–63.
[92] MA Guotao,HU Xiewen,YIN Yueping,et al. Failure mechanisms and development of catastrophic rockslides triggered by precipitation and open-pit mining in Emei,Sichuan,China[J]. Recent Landslides,2018,15(7):1401–1414.
[93] LI Qing,MIN Gaochen,CHEN Peng,et al. Computer vision-based techniques and path planning strategy in a slope monitoring system using unmanned aerial vehicle[J]. International Journal of Advanced Robotic Systems,2020,17(2):172988142090430.
[94] 宋誠. 數字攝影測量法在邊坡監測中的應用研究[D]. 廣州:廣州大學,2014.
SONG Cheng. The application research of digital photogrammetry method in slope monitoring[D]. Guangzhou:Guangzhou University,2014.
[95] 呂愛鐘,賈曉陽. 邊坡危險滑動面及穩定安全系數的力學解析方法[J/OL]. 工程地質學報,2021:1–7[2021-05-13]. https: //doi.org/10.13544/j.cnki.jeg.2020-568
LYU Aizhong,JIA Xiaoyang. Mechanical analysis method for dangerous sliding surface and factor of safety[J]. Journal of Engineering Geology,2021:1–7[2021-05-13]. https: //doi.org/10. 13544/j.cnki.jeg.2020-568
[96] 靳遠成,趙鵬輝,薄霧,等. 基于無人機影像的邊坡精細化建模及穩定性分析[J]. 水利與建筑工程學報,2020,18(6):178–183.
JIN Yuancheng,ZHAO Penghui,BO Wu,et al. Refined modeling and stability analysis of slope based on UAV images[J]. Journal of Water Resources and Architectural Engineering,2020,18(6):178–183.
[97] 岳西蒙,伍法權,沙鵬,等. 基于三維點云建模的礦山邊坡穩定性分析[J]. 中國礦業,2021,30(4):89–95.
YUE Ximeng,WU Faquan,SHA Peng,et al. Stability analysis of mine slope based on 3D point cloud modeling[J]. China Mining Magazine,2021,30(4):89–95.
[98] 金愛兵,陳帥軍,趙安宇,等. 基于無人機攝影測量的露天礦邊坡數值模擬[J]. 巖土力學,2021,42(1):255–264.
JIN Aibing,CHEN Shuaijun,ZHAO Anyu,et al. Numerical simulation of open-pit mine slope based on unmanned aerial vehicle photogrammetry[J]. Rock and Soil Mechanics,2021,42(1):255–264.
Application of unmanned aerial vehicle in surface soil characterization and geological disaster monitoring in mining areas
LONG Linli1,LIU Ying1,2,ZHANG Xuyang1,SU Yongdong1,CHEN Xiaoyang1,2
(1. School of Earth and Environment, Anhui University of Science and Technology, Huainan 232001, China; 2. Anhui Engineering Laboratory for Comprehensive Utilization of Water and Soil Resources and Ecological Protection in High Water Level Mining Areas, Huainan 232001, China)
With the emergence and development of UAVs and the improvement of the miniaturization and intelligence of various sensor, UAVs equipped with sensors have become an efficient tool for obtaining spatial data. Because UAVs are low cost, short revisit period, fast and efficient, light and flexible, simple operation, and high temporal and spatial accuracy of image acquisition, it is widely used in mining land damage monitoring.Using “UAV, Inversion, Soil Monitoring, Surface Collapse, Ground Fissure” as keywords, this paper summarizes the academic papers of the search system in the web of science, CNKI, and Google Scholar from January 2010 to May 2021. Through comparing and analyzing the differences between drone monitoring technology and other detection technologies, the drone monitoring of heavy metals, soil moisture content, and salt content in mining areas is reviewed. The general process and data processing methods of the measurement, surface subsidence, ground fissures and slope stability, and the application prospects of UAVs in surface soil characteristics and geological disaster monitoring in mining areas are summarized.It is believed that in the future, it is possible to integrate field time series tracking investigation, high-precision soil quality monitoring technology, high-spatial resolution drone monitoring technology, digital simulation methods, and test monitoring and analysis of typical working faces to study the coupling relationship between geohazards and soil quality evolution in the dynamic advancement of the working face from the open-off cut to the stop of mining. The coupled relationship is to construct a theoretical system and time series evolution model for the prediction of soil quality evolution in coal mining subsidence areas. This will further explore the relationship between soil quality in mining areas and geological disasters, and propose measures to mitigate, control and improve soil quality in mining areas, providing technical support for the coordinated and sustainable development of coal resource mining and ecological environment in China's coal production bases.
UAV; coal mining area; soil monitoring; geological disaster monitoring

語音講解
TD167
A
1001-1986(2021)06-0200-12
2021-05-28;
2021-08-05
國家自然科學基金項目(4157020161);安徽理工大學校級重點項目(自然科學類)(xjzd2020-04)
龍林麗,1998年生,女,四川自貢人,碩士研究生,從事礦山生態環境修復研究. E-mail:long6_6@163.com
陳孝楊,1976年生,男,安徽肥西人,博士,教授,博士生導師,從事礦山環境治理與場地污染控制研究. E-mail:chenxy@aust.edu.cn
龍林麗,劉英,張旭陽,等. 無人機在礦區表土特征及地質災害監測中的應用[J]. 煤田地質與勘探,2021,49(6):200–211. doi: 10.3969/j.issn.1001-1986.2021.06.024
LONG Linli,LIU Ying,ZHANG Xuyang,et al. Application of unmanned aerial vehicle in surface soil characterization and geological disaster monitoring in mining areas[J]. Coal Geology & Exploration,2021,49(6):200–211. doi: 10.3969/j.issn.1001-1986.2021.06.024

移動閱讀
(責任編輯 周建軍)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
