時(shí)頻域振幅相位聯(lián)合的最小二乘逆時(shí)偏移
2021-12-30 07:05:20胡勇潘冬明吳如山韓立國(guó)段超然
地球物理學(xué)報(bào) 2021年1期
關(guān)鍵詞:模型
胡勇, 潘冬明*, 吳如山, 韓立國(guó), 段超然
1 中國(guó)礦業(yè)大學(xué), 資源與地球科學(xué)學(xué)院, 徐州 221008 2 Modeling and Imaging Laboratory, University of California, Santa Cruz 95060, USA 3 吉林大學(xué), 地球探測(cè)科學(xué)與技術(shù)學(xué)院, 長(zhǎng)春 130026 4 常州工學(xué)院, 土木建筑工程學(xué)院, 常州 213000
0 引言
隨著油氣勘探技術(shù)的不斷發(fā)展,同時(shí)對(duì)地下構(gòu)造探測(cè)精度要求也逐漸提高,如今正從構(gòu)造勘探階段逐步轉(zhuǎn)向巖性勘探階段,其中地震數(shù)據(jù)偏移成像方法在油氣勘探領(lǐng)域占有重要的地位.近年來(lái)Kirchhoff 偏移、高斯束偏移、單程波偏移和逆時(shí)偏移等地震成像方法得到了快速發(fā)展(秦寧等,2015;You et al.,2019;豆輝和徐逸鶴,2019;Sun et al., 2020).在復(fù)雜介質(zhì)中,逆時(shí)偏移(RTM)方法具有成像精度高的優(yōu)點(diǎn),能夠適用于橫向速度變化劇烈的區(qū)域,獲取地下構(gòu)造高精度反射系數(shù)(Sun and Zhang, 2009;馬方正等,2016;You et al.,2017).但是逆時(shí)偏移的伴隨算子是正演算子的共軛轉(zhuǎn)置,而并非其逆算子(Claerbout,1991),因此無(wú)法獲得真振幅成像結(jié)果.
為了進(jìn)一步提高逆時(shí)偏移的成像精度,發(fā)展了最小二乘逆時(shí)偏移方法(LSRTM),其在反演的理論框架下,利用反偏移數(shù)據(jù)來(lái)不斷地與觀測(cè)數(shù)據(jù)相匹配,并通過(guò)優(yōu)化算法進(jìn)行迭代,最終獲取地下構(gòu)造的高精度成像結(jié)果.關(guān)于LSRTM的發(fā)展,首先由Nemeth等(1999)在最小二乘目標(biāo)函數(shù)的框架下實(shí)現(xiàn)了Kirchhoff偏移.隨后,Dai等(2012)、Dai和Schuster(2013)利用多源地震數(shù)據(jù)進(jìn)行測(cè)試,很大程度上提高了LSRTM的計(jì)算效率.任浩然等(2013)將Hessian算子應(yīng)用于LSRTM中,獲得了相對(duì)保真的成像結(jié)果,改善了地震偏移的成像精度.Tan和Huang(2014)在原始LSRTM的基礎(chǔ)上,提出了波場(chǎng)分離成像條件,并通過(guò)更新震源波場(chǎng)實(shí)現(xiàn)陡傾角斷層成像.此外,為了克服LSRTM對(duì)偏移模型的依賴問(wèn)題,劉玉金和李振春(2015)提出擴(kuò)展成像條件下的LSRTM方法,測(cè)試結(jié)果表明該方法可以獲得更準(zhǔn)確的振幅屬性信息.Huang等(2015)、周東紅等(2020)提出了帶地形的LSRTM方法,進(jìn)一步考慮地表起伏對(duì)波動(dòng)方程成像結(jié)果的影響,指出無(wú)需對(duì)地震數(shù)據(jù)進(jìn)行校正便可以獲得起伏地表高精度的成像結(jié)果.地震數(shù)據(jù)中的多次波同樣攜帶地下構(gòu)造信息,劉學(xué)建和劉伊克(2016)建立了基于多次波的LSRTM方法,并指出該方法能提供比反射波偏移成像更大的照明角度.陳生昌和周華敏(2018)在反射波成像的基礎(chǔ)上,研究了入射波與反射波在傳播算子上的差異,提出了新的反射波LSRTM方法.方修政等(2018)指出基于常規(guī)互相關(guān)成像條件的LSRTM梯度含有很強(qiáng)的低頻噪聲,為此提出了基于逆散射成像條件的LSRTM方法.田坤等(2018)、鞏向博等(2019)利用多源地震數(shù)據(jù),在稀疏約束的理論框架下展開(kāi)研究.Liu等(2020)在LSRTM中加入了Gabor反褶積濾波來(lái)提高鹽下構(gòu)造的成像精度.Li等(2020)通過(guò)引入權(quán)重因子來(lái)衰減地震數(shù)據(jù)中較強(qiáng)的反射波信息,進(jìn)而增強(qiáng)弱散射信號(hào),實(shí)現(xiàn)改善深部構(gòu)造成像精度的目標(biāo).經(jīng)過(guò)多年的研究,LSRTM技術(shù)得到了快速地發(fā)展,逐漸成為當(dāng)前的研究熱點(diǎn)問(wèn)題.但是地震波傳播是一個(gè)較為復(fù)雜的過(guò)程,使得LSRTM成像結(jié)果仍然受地震數(shù)據(jù)振幅信息影響較為嚴(yán)重.為了減弱振幅信息的影響,在互相關(guān)LSRTM目標(biāo)函數(shù)的基礎(chǔ)上提出了很多的改進(jìn)的方法(Zhang et al.,2015;Liu et al.,2016, 2017;李慶洋等,2016;Yi et al.,2019).但是如何在LSRTM方法基礎(chǔ)上,實(shí)現(xiàn)透過(guò)上覆強(qiáng)散射地質(zhì)體來(lái)獲得深部精細(xì)構(gòu)造的高精度成像目標(biāo),仍有待進(jìn)一步研究.
為此,本文在前人的研究基礎(chǔ)上,提出時(shí)頻域振幅相位聯(lián)合的最小二乘逆時(shí)偏移方法(PA-LSRTM),來(lái)實(shí)現(xiàn)對(duì)地下深部精細(xì)構(gòu)造的高精度成像.本文首先介紹PA-LSRTM目標(biāo)函數(shù)的構(gòu)建方法;其次,為了減弱地震數(shù)據(jù)振幅信息對(duì)成像結(jié)果的影響,在目標(biāo)函數(shù)中引入振幅權(quán)重因子,提高弱地震信號(hào)的可成像精度;然后,詳細(xì)推導(dǎo)了PA-LSRTM目標(biāo)函數(shù)對(duì)模型參數(shù)的梯度算子,并給出擾動(dòng)模型迭代表達(dá)式.最后,利用Marmousi模型和鹽丘模型進(jìn)行數(shù)值測(cè)試,并對(duì)RTM、LSRTM和PA-LSRTM的成像結(jié)果進(jìn)行對(duì)比分析.
1 方法原理
1.1 線性化Born正演
在常密度介質(zhì)中,聲波方程可以表示為
(1)
其中s為慢度場(chǎng),即速度的倒數(shù);u為聲壓波場(chǎng);f為震源子波.式(1)中可以將慢度場(chǎng)的平方分解為背景慢度場(chǎng)平方與擾動(dòng)慢度場(chǎng)平方的和(李慶洋等,2016):
(2)

u=u0+us.
(3)
根據(jù)式(3),背景波場(chǎng)和擾動(dòng)波場(chǎng)滿足以下關(guān)系:
(4)
+f,
(5)
當(dāng)擾動(dòng)場(chǎng)us?u0時(shí),可以用背景場(chǎng)代替總場(chǎng)u0≈u0+us.因此,可以獲得擾動(dòng)波場(chǎng)的表達(dá)式,即:
(6)
欲求解擾動(dòng)波場(chǎng)us,只需要在偏移模型上將背景波場(chǎng)u0代入公式(6)中,再做一次波動(dòng)方程正演模擬即可.
1.2 最小二乘逆時(shí)偏移原理
LSRTM是利用模擬數(shù)據(jù)來(lái)不斷地與觀測(cè)數(shù)據(jù)相匹配,通過(guò)最小化目標(biāo)函數(shù)來(lái)獲取擾動(dòng)模型的高精度成像結(jié)果.因此,LSRTM的目標(biāo)函數(shù)可以定義為
(7)

(8)
目標(biāo)函數(shù)對(duì)模型參數(shù)的梯度可以表示為
(9)
其中T表示矩陣轉(zhuǎn)置;ns、nr分別表示震源數(shù)目和檢波器數(shù)目;Rs=(us-ds)表示伴隨震源.因此,目標(biāo)函數(shù)對(duì)模型參數(shù)的梯度可以表示為反傳波場(chǎng)與正傳波場(chǎng)的零延遲互相關(guān):
(10)
(11)
本文設(shè)定初始模型參數(shù)為m0=0,對(duì)應(yīng)的模擬數(shù)據(jù)us=0,此時(shí)Rs=-ds.因此,LSRTM第一次的梯度等價(jià)于常規(guī)逆時(shí)偏移成像結(jié)果.隨著模型參數(shù)不斷地被更新,模擬數(shù)據(jù)us逐漸趨近于觀測(cè)數(shù)據(jù)ds,同時(shí)對(duì)應(yīng)的LSRTM的目標(biāo)函數(shù)也逐漸減小,最終獲得地下構(gòu)造高精度偏移成像結(jié)果.
1.3 時(shí)頻域振幅相位聯(lián)合的最小二乘逆時(shí)偏移
時(shí)頻域振幅相位聯(lián)合的最小二乘逆時(shí)偏移(PA-LSRTM)是利用模擬數(shù)據(jù)的時(shí)頻域振幅相位信息來(lái)不斷地與觀測(cè)數(shù)據(jù)的時(shí)頻域振幅相位信息相匹配,通過(guò)最小化目標(biāo)函數(shù)來(lái)獲取擾動(dòng)模型的高精度成像結(jié)果.與常規(guī)LSRTM相似,PA-LSRTM的目標(biāo)函數(shù)定義為:
(12)

(13)

(14)
式(14)可以簡(jiǎn)化為(詳見(jiàn)附錄C):
(15)
根據(jù)式(15),伴隨震源可以定義為
(16)
式(16)為了避免分母為0,可在分母處加一個(gè)微小的常數(shù).其中,PA-LSRTM的梯度計(jì)算過(guò)程與常規(guī)LSRTM梯度計(jì)算相似,只需要將伴隨震源Rs反傳至模型空間并與正傳波場(chǎng)做零延遲互相關(guān).
圖1給出了伴隨震源某一道數(shù)據(jù)對(duì)應(yīng)的時(shí)頻域分析結(jié)果.從圖1a中可以看出,地震信號(hào)的振幅譜在淺部能量較強(qiáng),但隨著傳播時(shí)間增大能量快速衰減.深部反射的弱振幅地震信號(hào)在目標(biāo)函數(shù)中占有很小的權(quán)重,因此增加了深部精細(xì)構(gòu)造的成像難度.當(dāng)ε=0.6時(shí),伴隨震源的深部信號(hào)得到了明顯地增強(qiáng)(圖1b),同時(shí)也均衡了淺部強(qiáng)能量,有助于提高深部弱反射信號(hào)在目標(biāo)函數(shù)中的權(quán)重.當(dāng)進(jìn)一步減小振幅權(quán)重因子ε=0.3,相應(yīng)的相位譜信息在PA-LSRTM目標(biāo)函數(shù)中得到了進(jìn)一步地增強(qiáng)(圖1c).當(dāng)ε=0時(shí),從淺部到深部的振幅譜基本具有相同的權(quán)重,即使在5 s時(shí),深部弱反射地震信號(hào)依然清晰可辨.但是,此時(shí)PA-LSRTM目標(biāo)函數(shù)中完全忽略了振幅信息,則此時(shí)目標(biāo)函數(shù)易受到噪聲相位的影響.因此,本文PA-LSRTM方法首先選用振幅權(quán)重因子ε=0.6來(lái)更新模型參數(shù);然后,逐漸減小振幅權(quán)重因子,提高深部區(qū)域擾動(dòng)模型的成像精度,直至振幅權(quán)重因子為ε=0.3.這樣既能減弱振幅信息對(duì)深部區(qū)域成像不足的影響,同時(shí)也避免純相位目標(biāo)函數(shù)產(chǎn)生的噪聲干擾,實(shí)現(xiàn)最大化提高深部弱反射信號(hào)成像精度的目標(biāo).
1.4 時(shí)頻域振幅相位聯(lián)合的最小二乘逆時(shí)偏移流程
地震波在地下傳播過(guò)程較為復(fù)雜,常受到強(qiáng)散射介質(zhì)的屏蔽作用,致使深部構(gòu)造對(duì)應(yīng)的地震波場(chǎng)響應(yīng)較弱,難以獲得高精度成像結(jié)果.為了解決深部精細(xì)構(gòu)造成像問(wèn)題,PA-LSRTM方法通過(guò)增強(qiáng)時(shí)頻域相位譜的權(quán)重,同時(shí)減弱振幅信息的影響,提高深部弱地震信號(hào)的可成像精度,進(jìn)而實(shí)現(xiàn)深部區(qū)域和強(qiáng)散射地質(zhì)體下部構(gòu)造的高精度成像.PA-LSRTM算法的具體實(shí)施流程如圖2所示:首先,將觀測(cè)數(shù)據(jù)和模擬數(shù)據(jù)變換至?xí)r頻域,通過(guò)振幅權(quán)重因子在目標(biāo)函數(shù)中調(diào)整振幅相位占比,增強(qiáng)相位信息在成像過(guò)程中所占權(quán)重;然后,利用Gabor逆變換將時(shí)頻域伴隨震源變換至?xí)r間域,再利用伴隨算子把伴隨震源反傳至模型空間,獲得反傳波場(chǎng);最后,計(jì)算正傳波場(chǎng)與反傳波場(chǎng)的零延遲互相關(guān),即為模型參數(shù)的更新梯度,并結(jié)合局部?jī)?yōu)化算法對(duì)成像結(jié)果不斷地迭代.
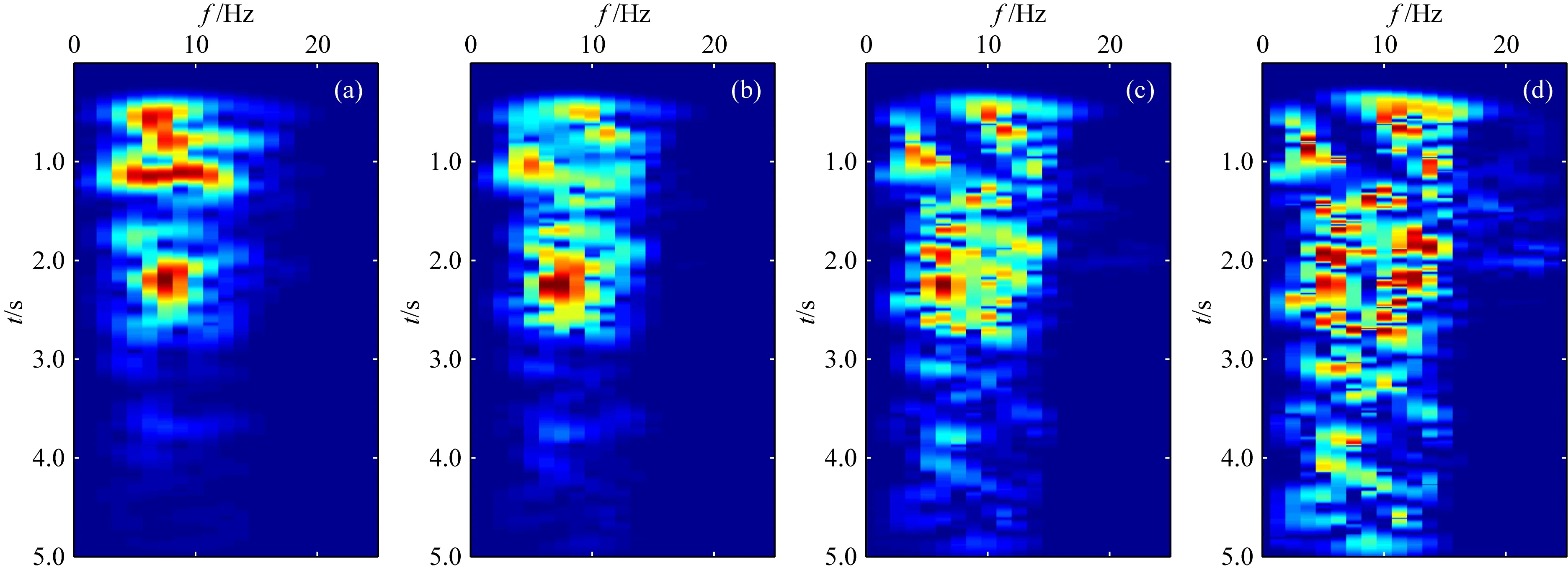
圖1 PA-LSRTM伴隨震源單道時(shí)頻域振幅譜(不同振幅權(quán)重因子) (a) ε=1; (b) ε=0.6; (c) ε=0.3; (d) ε=0.Fig.1 Time-frequency domain amplitude information of the single trace PA-LSRTM adjoint source with different amplitude weight factors
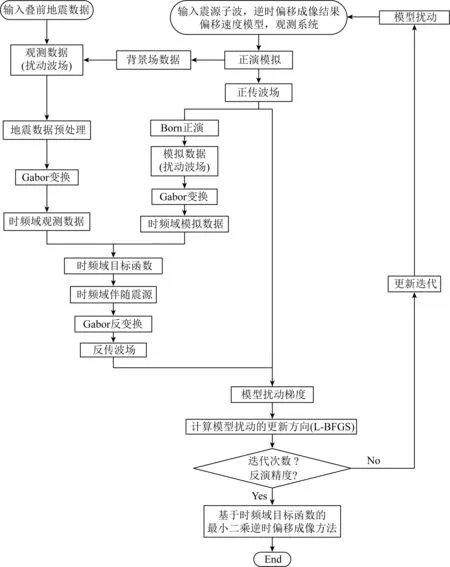
圖2 時(shí)頻域振幅相位聯(lián)合的最小二乘逆時(shí)偏移(PA-LSRTM)流程圖Fig.2 Flow chart of joint least square reverse time migration of phase and amplitude in the time-frequency domain (PA-LSRTM)
2 數(shù)值試驗(yàn)
本文首先利用Marmousi速度模型來(lái)測(cè)試RTM、LSRTM和PA-LSRTM的成像效果.Marmousi速度模型如圖3a所示,經(jīng)過(guò)平滑以后的速度模型如圖3b所示,真實(shí)擾動(dòng)模型如圖3c所示.Marmousi速度模型構(gòu)造復(fù)雜,同時(shí)在深部區(qū)域含有強(qiáng)散射構(gòu)造,增加了深部精細(xì)構(gòu)造的成像難度.Marmousi速度模型的橫向距離為15 km,縱向深度為3.5 km,網(wǎng)格間距為25 m.在地表以300 m間隔均勻分布50炮,每炮對(duì)應(yīng)600個(gè)檢波器全接收.雷克子波震源主頻為8 Hz,地震數(shù)據(jù)觀測(cè)最大時(shí)長(zhǎng)為5 s,時(shí)間采樣間隔為2 ms.
圖4為Marmousi模型成像結(jié)果,與圖3c所示的真實(shí)擾動(dòng)模型對(duì)比可以看出,RTM成像結(jié)果基本能恢復(fù)Marmousi模型的構(gòu)造信息,但是在深部區(qū)域存在明顯的成像不足問(wèn)題,同時(shí)在振幅上與真實(shí)擾動(dòng)模型相差較大.將圖4a、b對(duì)比發(fā)現(xiàn),LSRTM成像結(jié)果很好地恢復(fù)了Marmousi速度模型的深部構(gòu)造信息,使得深淺區(qū)域成像振幅更加均衡,分辨率也得到了很大的改善.將圖4a、b、c對(duì)比發(fā)現(xiàn),PA-LSRTM成像結(jié)果在薄細(xì)層位成像精度上有了明顯地提高,同時(shí)成像振幅也更加接近真實(shí)擾動(dòng)模型.此外,在Marmousi模型的強(qiáng)散射構(gòu)造下部區(qū)域(左下側(cè)紅色線框)和儲(chǔ)層構(gòu)造區(qū)域(右下側(cè)紅色線框)的成像分辨率與LSRTM成像結(jié)果相比較,有了較大改善.
為了清晰地看出PA-LSRTM方法在深部精細(xì)構(gòu)造成像優(yōu)勢(shì),提取圖4所示成像結(jié)果的局部放大圖來(lái)進(jìn)行對(duì)比分析,如圖5所示.可以看出PA-LSRTM成像結(jié)果相比于LSRTM成像結(jié)果在不整合面上的成像有了明顯地改善(左下側(cè)紅色線框),同時(shí)強(qiáng)散射介質(zhì)底部的傾斜構(gòu)造也得到了清晰地成像.提取了圖4中Marmousi模型右側(cè)含油氣儲(chǔ)層構(gòu)造區(qū)域的成像結(jié)果進(jìn)行對(duì)比分析(右下側(cè)紅色線框),如圖6所示.可以看出PA-LSRTM成像結(jié)果在儲(chǔ)層位置處的成像分辨率上相比于RTM和LSRTM成像結(jié)果有了明顯的提高.根據(jù)Marmousi模型成像結(jié)果的局部放大圖可以看出,PA-LSRTM方法相比于RTM和LSRTM方法在深部區(qū)域的成像方面有著一定的優(yōu)勢(shì).
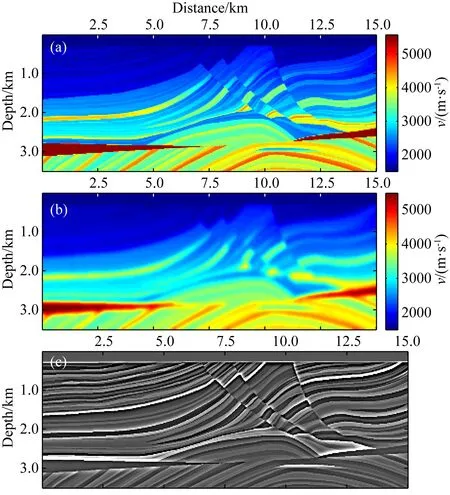
圖3 (a) Marmousi速度模型; (b) 偏移速度模型; (c) 真實(shí)擾動(dòng)模型Fig.3 (a) Marmousi velocity model; (b) Migration velocity model; (c) True model perturbations
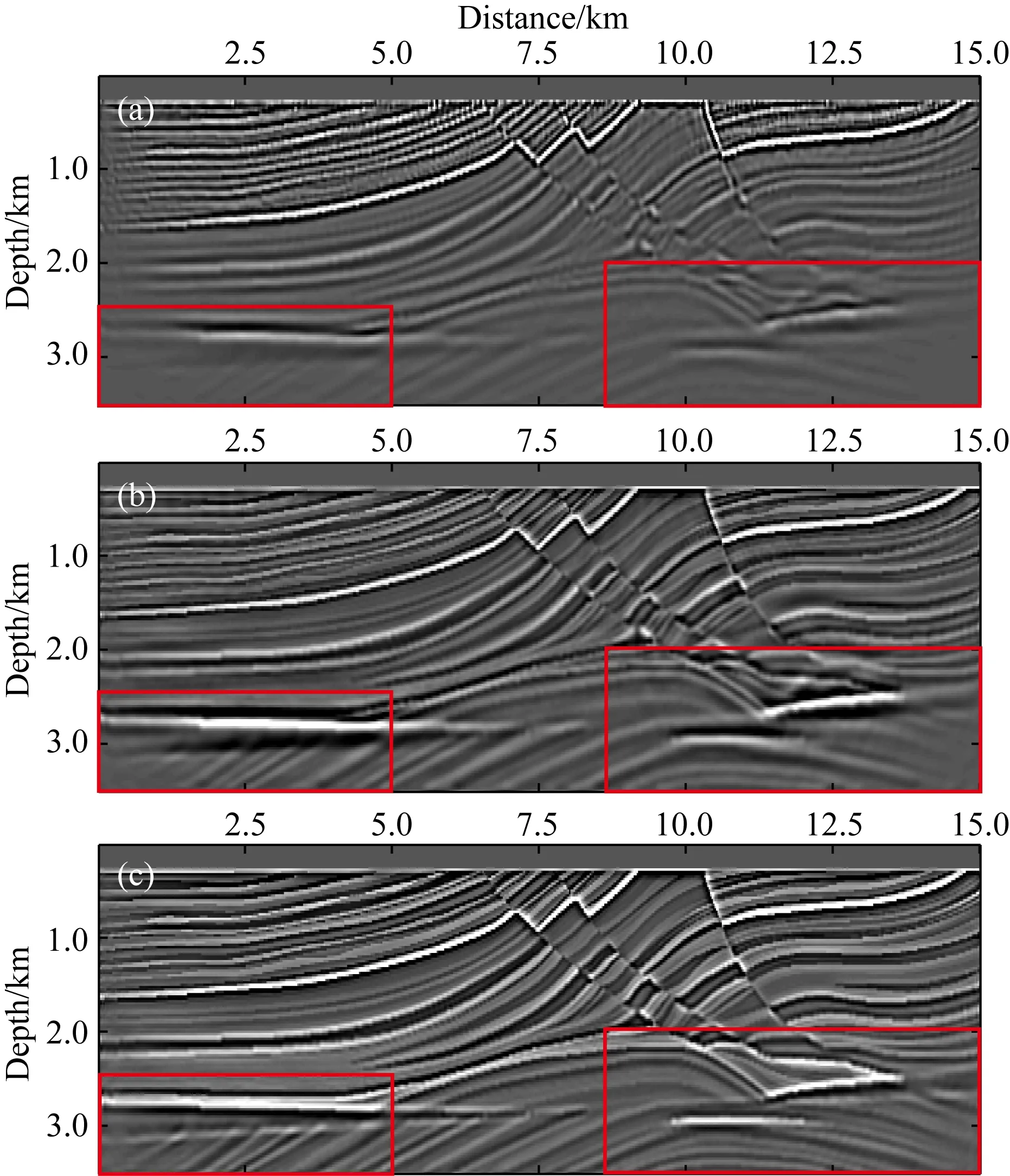
圖4 Marmousi模型成像結(jié)果 (a) RTM成像結(jié)果; (b) LSRTM成像結(jié)果; (c) PA-LSRTM成像結(jié)果.Fig.4 Imaging results of the Marmousi model (a) RTM result; (b) LSRTM result; (c) PA-LSRTM result.
進(jìn)一步分析RTM、LSRTM和PA-LSRTM的成像結(jié)果的可靠性,利用圖4所示成像結(jié)果進(jìn)行Born正演模擬,震源位置設(shè)置在橫向距離7.5 km處,并將產(chǎn)生的地震數(shù)據(jù)與真實(shí)擾動(dòng)數(shù)據(jù)進(jìn)行對(duì)比(圖7).將圖7a、b對(duì)比可以發(fā)現(xiàn),RTM的成像結(jié)果對(duì)應(yīng)的模擬數(shù)據(jù)與真實(shí)擾動(dòng)波場(chǎng)相差較大,不僅在深部區(qū)域地震擾動(dòng)波場(chǎng)存在明顯的差異,在淺部區(qū)域RTM成像結(jié)果對(duì)應(yīng)的擾動(dòng)波場(chǎng)同相軸也存在著明顯的噪聲干擾問(wèn)題.將圖7a、c、d對(duì)比可以發(fā)現(xiàn),LSRTM和PA-LSRTM成像結(jié)果對(duì)應(yīng)的模擬數(shù)據(jù)更接近真實(shí)的擾動(dòng)波場(chǎng).但是在LSRTM成像結(jié)果對(duì)應(yīng)的模擬數(shù)據(jù)中缺失一些弱同相軸信息,這主要是因?yàn)長(zhǎng)SRTM的深部成像結(jié)果與真實(shí)擾動(dòng)模型仍存在一定的差距.將圖7a、d對(duì)比可以發(fā)現(xiàn),即使觀測(cè)數(shù)據(jù)中的一些微弱同相軸信息,在基于PA-LSRTM成像結(jié)果進(jìn)行Born正演的模擬數(shù)據(jù)中也有與之對(duì)應(yīng)的同相軸信息.同時(shí)提取圖4的單道成像剖面進(jìn)行對(duì)比分析,如圖8所示,可以看出RTM成像振幅與真實(shí)擾動(dòng)模型振幅相差較大,LSRTM成像振幅有了明顯的改善.在圖8深部區(qū)域,可以明顯看到PA-LSRTM的振幅更加接近真實(shí)擾動(dòng)模型振幅,也進(jìn)一步證明了PA-LSRTM方法在弱地震信號(hào)成像方面具有一定的優(yōu)勢(shì).
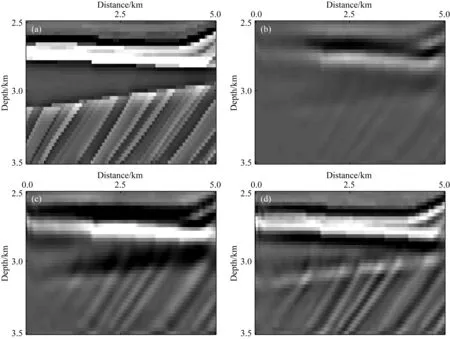
圖5 Marmousi模型成像結(jié)果局部放大圖(圖4左下側(cè)紅色線框) (a) 真實(shí)擾動(dòng)模型; (b) RTM成像結(jié)果; (c) LSRTM成像結(jié)果; (d) PA-LSRTM成像結(jié)果.Fig.5 Magnified view of Marmousi model imaging results (red rectangular at lower left side in Fig.4) (a) True perturbation model; (b) RTM result; (c) LSRTM result; (d) PA-LSRTM result.
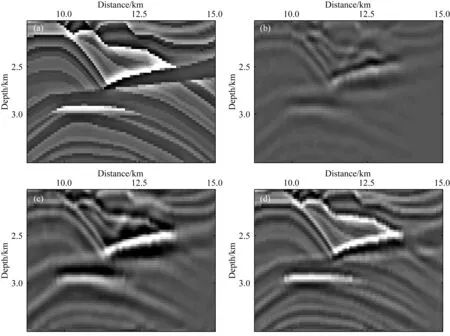
圖6 Marmousi模型成像結(jié)果局部放大圖(圖4右下側(cè)紅色線框) (a) 真實(shí)擾動(dòng)模型; (b) RTM成像結(jié)果; (c) LSRTM成像結(jié)果; (d) PA-LSRTM成像結(jié)果.Fig.6 Magnified view of Marmousi model imaging results (red rectangular at lower right side in Fig.4) (a) True perturbation model; (b) RTM result; (c) LSRTM result; (d) PA-LSRTM result.
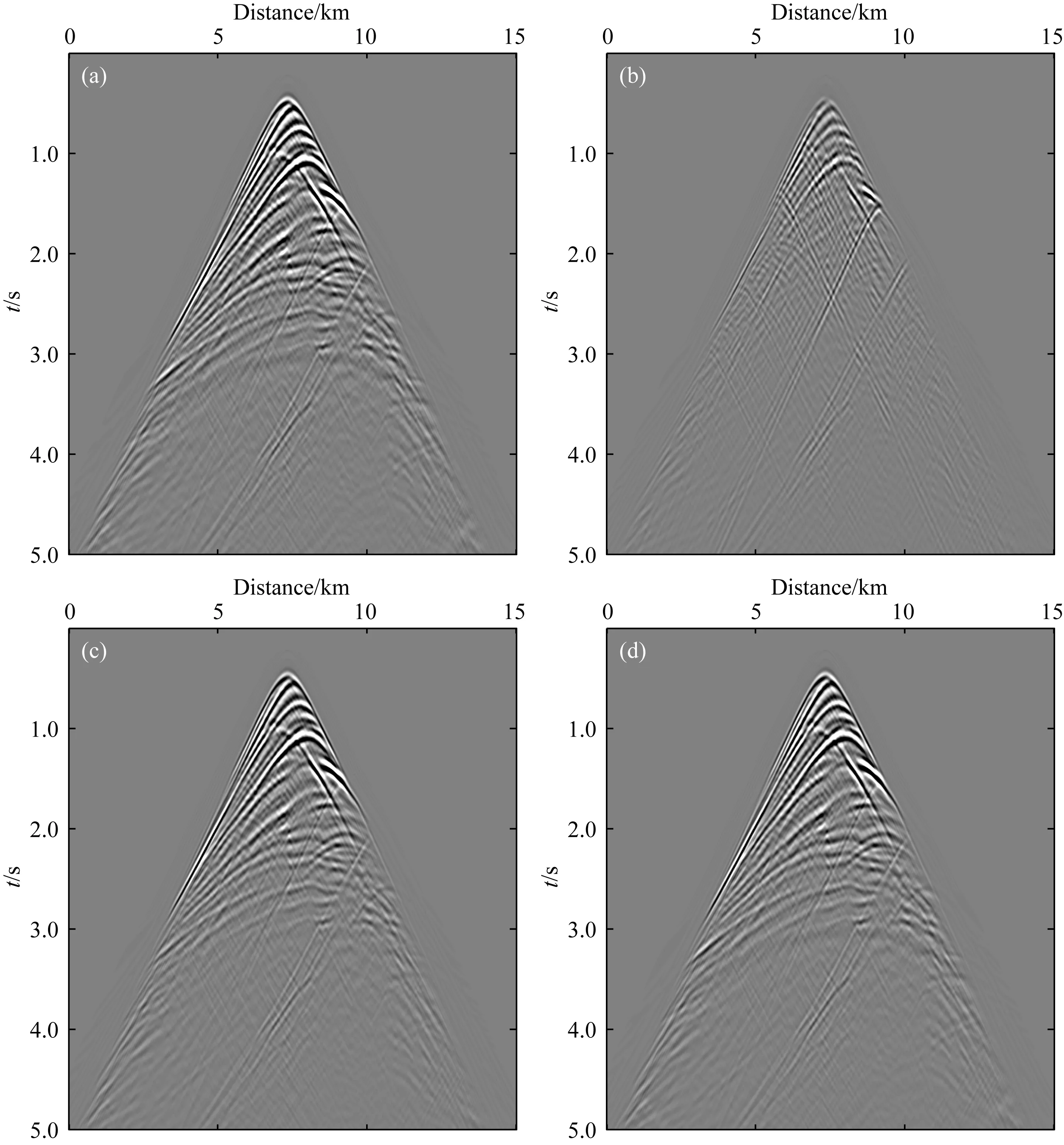
圖7 地震擾動(dòng)波場(chǎng)數(shù)據(jù) (a) 真實(shí)擾動(dòng)模型; (b) RTM成像結(jié)果; (c) LSRTM成像結(jié)果; (d) PA-LSRTM成像結(jié)果.Fig.7 Seismic perturbation data (a) True perturbation model; (b) RTM result; (c) LSRTM result; (d) PA-LSRTM result.
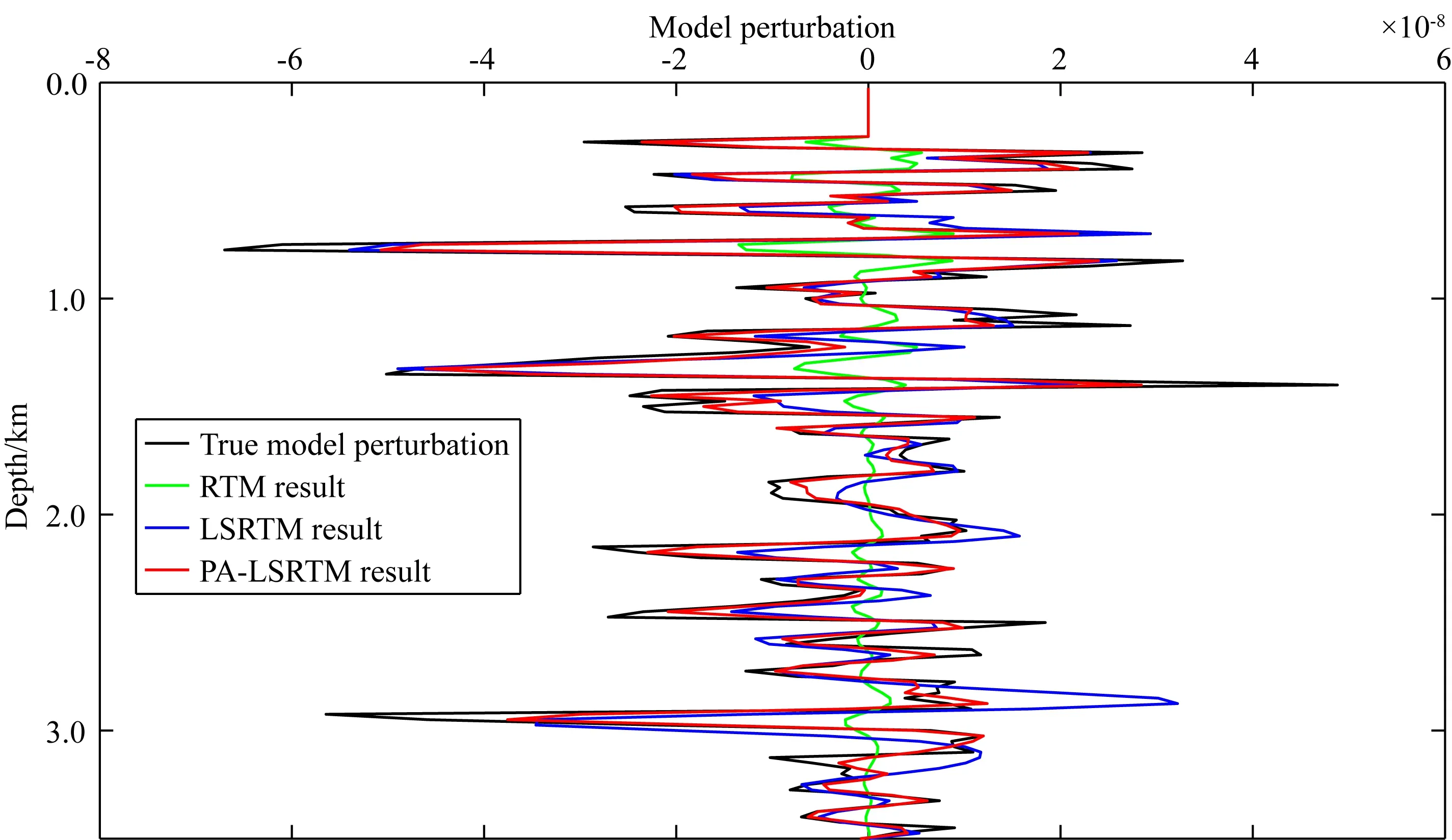
圖8 單道成像剖面圖(Marmousi模型11 km處)Fig.8 Single trace imaging profile (Marmousi model at 11 km)
利用鹽丘模型對(duì)RTM、LSRTM和PA-LSRTM方法進(jìn)行數(shù)值測(cè)試,旨在分析鹽丘底界面及其鹽下構(gòu)造的成像精度.真實(shí)鹽丘速度模型如圖9a所示,經(jīng)過(guò)平滑以后的偏移速度模型如圖9b所示,真實(shí)鹽丘擾動(dòng)模型如圖9c所示.鹽丘模型橫向距離為15 km,縱向深度為3.5 km,網(wǎng)格間距為25 m.在地表以300 m間隔均勻分布50炮,每炮對(duì)應(yīng)600個(gè)檢波器全接收.在測(cè)試過(guò)程中,采用震源主頻為8 Hz的雷克子波,地震數(shù)據(jù)的最大記錄時(shí)間為5 s,采樣時(shí)間間隔為2 ms.圖9所示模型中存在強(qiáng)散射鹽丘構(gòu)造,致使大部分地震波能量很難透過(guò)鹽丘體,攜帶鹽下構(gòu)造信息返回地表.此外,鹽下構(gòu)造的反射波至少需要往返兩次穿過(guò)鹽體,致使檢波器接收到鹽下構(gòu)造的地震波響應(yīng)信號(hào)較弱,使得鹽丘底界面及其鹽下精細(xì)構(gòu)造成像精度不足.
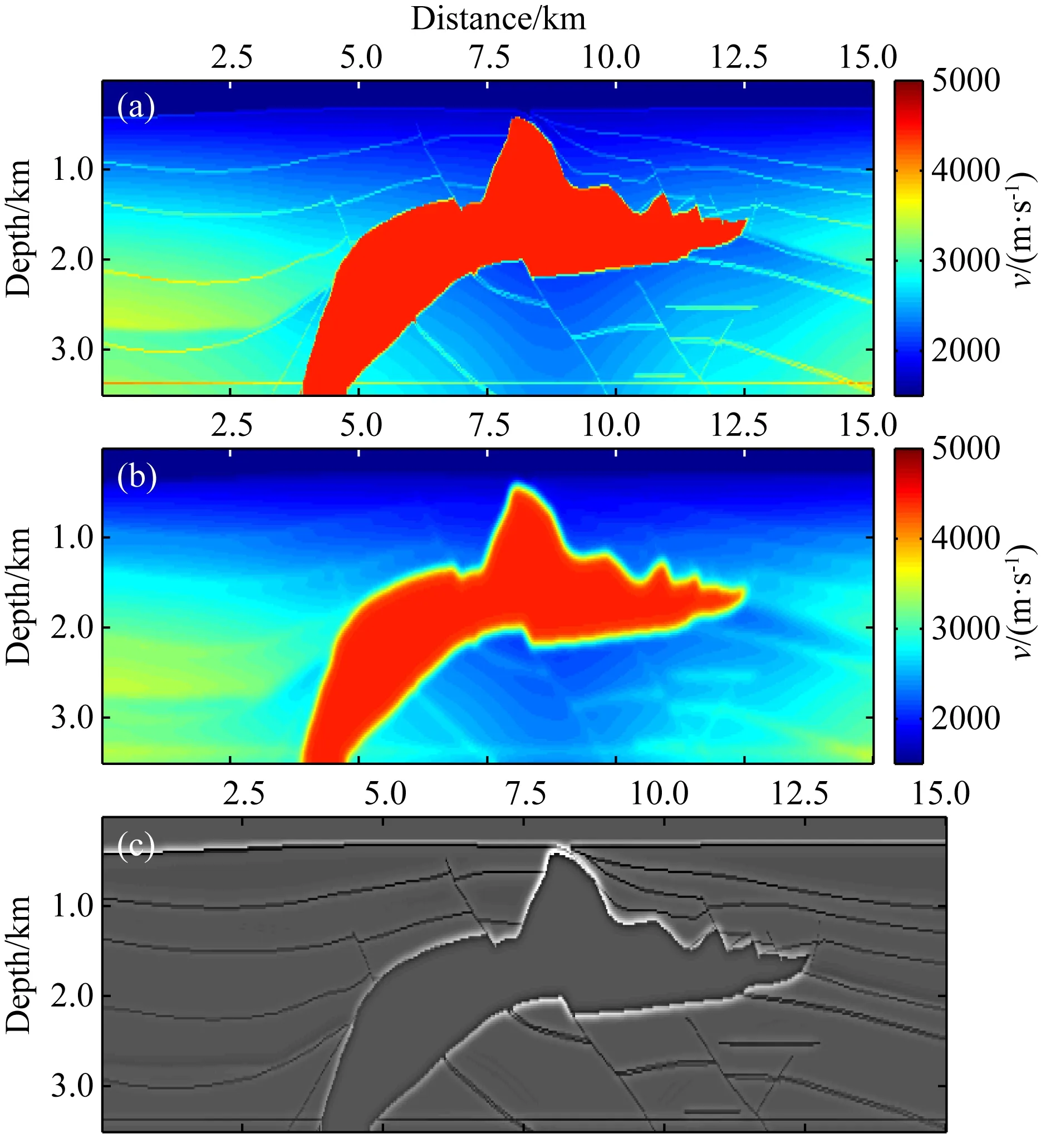
圖9 鹽丘模型 (a) 真實(shí)鹽丘速度模型; (b) 偏移速度模型; (c) 真實(shí)擾動(dòng)模型.Fig.9 Salt model (a) True salt velocity model; (b) Migration velocity model; (c) True perturbations model.
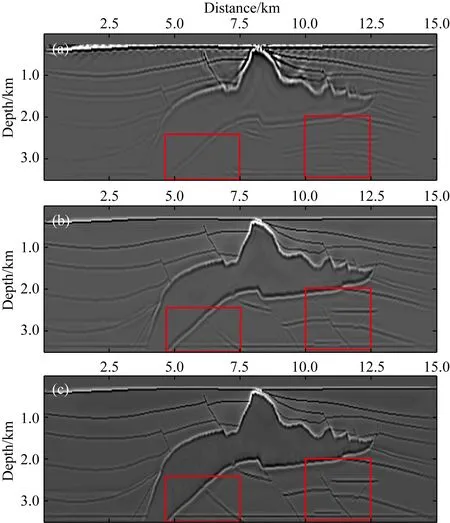
圖10 鹽丘模型成像結(jié)果 (a) RTM成像結(jié)果; (b) LSRTM成像結(jié)果; (c) PA-LSRTM成像結(jié)果.Fig.10 Imaging results of the salt model (a) RTM result; (b) LSRTM result; (c) PA-LSRTM result.
圖10分別展示了RTM、LSRTM和PA-LSRTM的鹽丘模型成像結(jié)果.從圖10a中可以看出,RTM成像結(jié)果淺部能量較強(qiáng).這主要是因?yàn)榛诓▌?dòng)方程的互相關(guān)成像條件受到震源的影響較為嚴(yán)重.與此同時(shí),RTM成像結(jié)果在深部區(qū)域存在明顯的成像不足等問(wèn)題,這主要是因?yàn)榈卣鸩芰吭趥鞑ミ^(guò)程中快速衰減,深部反射的地震信號(hào)較弱,很難獲得高質(zhì)量的成像結(jié)果.將圖10a、b對(duì)比發(fā)現(xiàn),LSRTM成像結(jié)果很好地呈現(xiàn)出了鹽丘速度模型的深部構(gòu)造信息,使得整個(gè)鹽丘模型從淺部到深部成像振幅更加均衡,鹽丘構(gòu)造的成像分辨率得到了較大的改善.將圖10a、b、c對(duì)比發(fā)現(xiàn),PA-LSRTM方法在鹽丘下部區(qū)域精細(xì)構(gòu)造成像分辨率上有了較大提高.此外,PA-LSRTM方法通過(guò)增強(qiáng)相位權(quán)重法,減弱振幅影響,有效緩解了震源處的強(qiáng)能量對(duì)淺部區(qū)域成像的干擾,使得PA-LSRTM成像結(jié)果從淺層到深層振幅更加均衡.
接著提取鹽丘模型成像結(jié)果的局部放大圖進(jìn)行分析,如圖11和圖12所示.圖11是鹽下構(gòu)造成像結(jié)果左下側(cè)的局部放大對(duì)比圖,該區(qū)域主要是分析鹽下精細(xì)構(gòu)造的成像精度.根據(jù)圖11的對(duì)比結(jié)果可以看出,PA-LSRTM成像結(jié)果相比于RTM和LSRTM成像結(jié)果在鹽丘的下界面及其鹽下構(gòu)造成像更接近真實(shí)擾動(dòng)模型.圖12是鹽丘模型右下側(cè)的局部放大對(duì)比圖,相比于RTM和LSRTM成像結(jié)果,可以看出PA-LSRTM成像結(jié)果在深部區(qū)域精細(xì)構(gòu)造成像分辨率上有了很大的提高.圖13是單道成像剖面圖,可以看出RTM成像振幅與真實(shí)擾動(dòng)模型振幅相差較大,尤其是在深部區(qū)域,RTM幾乎無(wú)法獲得鹽下深部構(gòu)造信息.與RTM成像結(jié)果相比,LSRTM
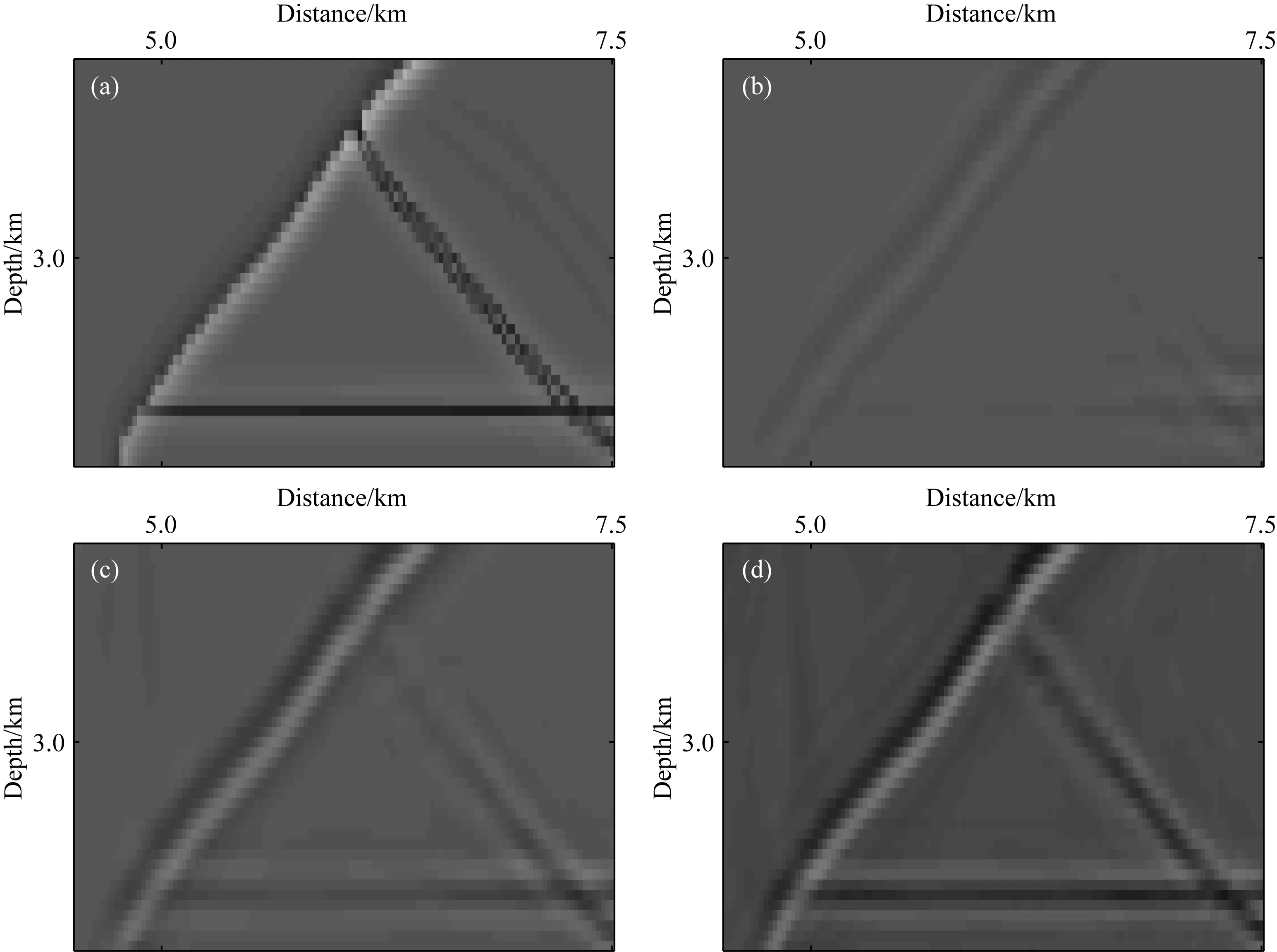
圖11 鹽丘模型成像結(jié)果局部放大圖(圖10左下側(cè)紅色線框) (a) 真實(shí)擾動(dòng)模型; (b) RTM成像結(jié)果; (c) LSRTM成像結(jié)果; (d) PA-LSRTM成像結(jié)果.Fig.11 Magnified view of salt model imaging results (red rectangular at lower left side in Fig.10) (a) True perturbation model; (b) RTM result; (c) LSRTM result; (d) PA-LSRTM result.
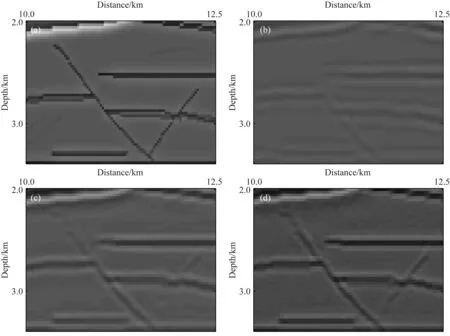
圖12 鹽丘模型成像結(jié)果局部放大圖(圖10右下側(cè)紅色線框) (a) 真實(shí)擾動(dòng)模型; (b) RTM成像結(jié)果; (c) LSRTM成像結(jié)果; (d) PA-LSRTM成像結(jié)果.Fig.12 Magnified view of salt model imaging results (red rectangular at lower right side in Fig.10) (a) True perturbation model; (b) RTM result; (c) LSRTM result; (d) PA-LSRTM result.
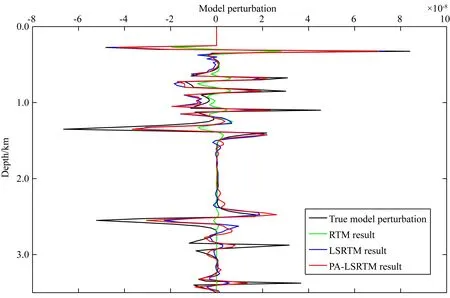
圖13 單道成像剖面圖(鹽丘模型6.25 km處)Fig.13 Single trace imaging profile (salt model at 6.25 km)
成像振幅有了較大的提高,但是在深部區(qū)域的成像振幅仍然與真實(shí)擾動(dòng)模型有一定的差距.在深度為3 km處(圖13),PA-LSRTM成像振幅最接近真實(shí)擾動(dòng)模型振幅.綜合鹽丘模型成像結(jié)果、局部放大對(duì)比圖及其單道成像剖面對(duì)比圖可以看出,PA-LSRTM方法在透過(guò)上覆強(qiáng)散射地質(zhì)體(鹽丘)對(duì)鹽下構(gòu)造成像方面具有一定優(yōu)勢(shì).
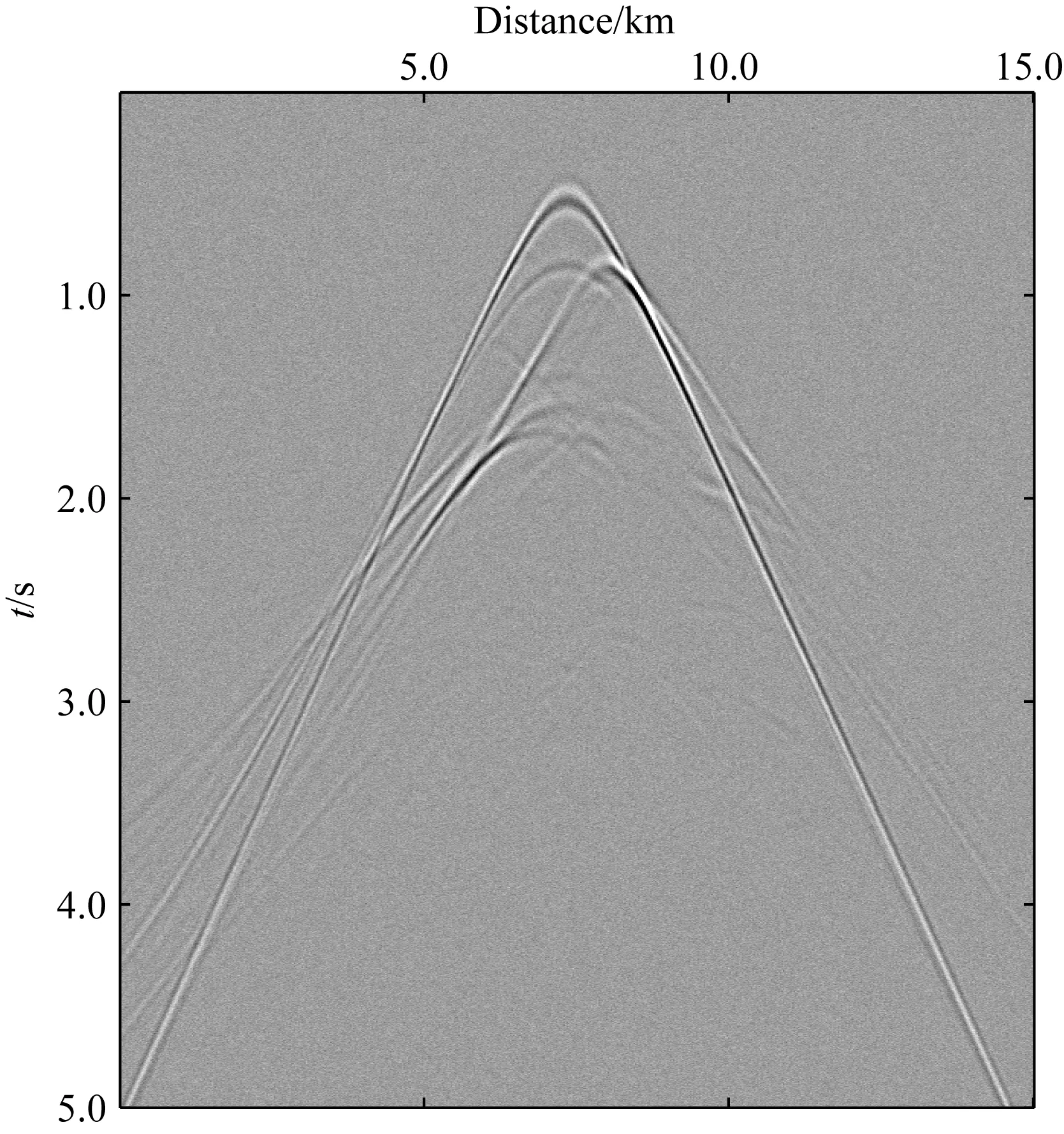
圖14 含噪擾動(dòng)波場(chǎng)(信噪比SNR=-3.59)Fig.14 Perturbation wavefield with Gaussian noise (SNR=-3.59)
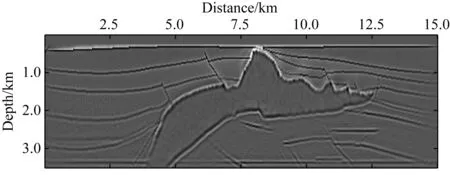
圖15 含噪PA-LSRTM成像結(jié)果Fig.15 PA-LSRTM result with Gaussian noise
地震數(shù)據(jù)中相位信息相比于振幅信息具有與地下介質(zhì)更好的線性對(duì)應(yīng)關(guān)系(Fichtner et al.,2008;Djebbi and Alkhalifah,2014;胡勇等,2018),但是純相位目標(biāo)函數(shù)容易受到噪聲的干擾,為此本文提出振幅相位聯(lián)合的最小二乘逆時(shí)偏移成像方法(PA-LSRTM).為了測(cè)試該方法的抗噪性,在地震數(shù)據(jù)中加入了較強(qiáng)高斯噪聲,含噪單炮記錄如圖14所示,其中深部區(qū)域的弱散射信號(hào)幾乎被噪聲掩蓋,這給深部區(qū)域成像帶來(lái)了一定的困難.在負(fù)信噪比的情況下(SNR=-3.59),鹽丘模型的PA-LSRTM成像結(jié)果如圖15所示.將圖15與圖10c對(duì)比可以發(fā)現(xiàn),鹽丘內(nèi)部區(qū)域成像結(jié)果受到噪聲影響較為嚴(yán)重,但依然能夠很好地對(duì)鹽丘邊界及其鹽下精細(xì)構(gòu)造進(jìn)行成像.這主要是因?yàn)檎穹鶛?quán)重因子開(kāi)始設(shè)定為ε=0.6,然后逐漸減小至ε=0.3,目標(biāo)函數(shù)中的這一部分振幅信息很好地緩解了噪聲相位對(duì)成像結(jié)果的干擾.因此,在PA-LSRTM目標(biāo)函數(shù)中重新分配振幅和相位的占比,既能很好的利用相位信息對(duì)深部構(gòu)造進(jìn)行成像,同時(shí)還能在一定程度上緩解噪聲相位對(duì)成像結(jié)果的干擾.從含強(qiáng)高斯噪聲的測(cè)試結(jié)果中可以看出,PA-LSRTM適合針對(duì)深部區(qū)域、強(qiáng)散射構(gòu)造、及其鹽下構(gòu)造進(jìn)行精細(xì)成像,同時(shí)該方法還具有一定的抗噪性.
3 結(jié)論與認(rèn)識(shí)
針對(duì)常規(guī)最小二乘逆時(shí)偏移鹽下精細(xì)構(gòu)造成像困難的問(wèn)題,本文提出時(shí)頻域振幅相位聯(lián)合的最小二乘逆時(shí)偏移方法,結(jié)合理論分析和模型測(cè)試得出以下幾點(diǎn)結(jié)論與認(rèn)識(shí):
(1)LSRTM方法很好地解決了RTM成像振幅不均衡的問(wèn)題,同時(shí)大大提高了成像分辨率.但是由于LSRTM方法受振幅影響較為嚴(yán)重,因此很難獲得鹽下構(gòu)造等深部區(qū)域的高精度成像結(jié)果.
(2)時(shí)頻域目標(biāo)函數(shù)能夠很好地分離了地震信號(hào)的振幅和相位信息,通過(guò)引入振幅權(quán)重因子,調(diào)節(jié)振幅和相位信息在目標(biāo)函數(shù)中的權(quán)重,弱化振幅對(duì)成像結(jié)果的影響.在此基礎(chǔ)上,PA-LSRTM方法很好地實(shí)現(xiàn)了深部弱地震信號(hào)的高精度成像.
(3)純相位目標(biāo)函數(shù)容易受到噪聲的干擾,本文通過(guò)在時(shí)頻域目標(biāo)函數(shù)中聯(lián)合使用振幅和相位信息,在提高地下深部區(qū)域精細(xì)構(gòu)造的成像質(zhì)量的情況下,同時(shí)也保證了PA-LSRTM算法的抗噪性和穩(wěn)定性.
最后,Marmousi模型和鹽丘模型的數(shù)值測(cè)試結(jié)果表明,PA-LSRTM方法能夠很好地利用弱地震信號(hào)的時(shí)頻域振幅相位信息,實(shí)現(xiàn)透過(guò)上覆強(qiáng)散射地層獲得深部構(gòu)造高精度成像的目標(biāo).
附錄A
時(shí)頻域目標(biāo)函數(shù)對(duì)應(yīng)的振幅譜和相位譜,可以通過(guò)Gabor時(shí)頻變換獲得,其中觀測(cè)數(shù)據(jù)和模擬數(shù)據(jù)的Gabor變換為
(A1)
(A2)
(A3)

(A4)

附錄B
根據(jù)波動(dòng)方程的表達(dá)式,在計(jì)算擾動(dòng)波場(chǎng)的過(guò)程中,Born正演模擬也可以用矩陣的形式來(lái)表示:
Asus=A0u0,
(B1)

(B2)
由于As和u0與模型參數(shù)無(wú)關(guān),則式(B2)變?yōu)?/p>
(B3)
因此,LSRTM的目標(biāo)函數(shù)相對(duì)于模型參數(shù)的偏導(dǎo)數(shù)可以表示為
(B4)

(B5)
因此,LSRTM和PA-LSRTM目標(biāo)函數(shù)對(duì)模型參數(shù)的梯度可以表示為正傳波場(chǎng)與反傳波場(chǎng)的零延遲互相關(guān).
附錄C
PA-LSRTM目標(biāo)函數(shù)是利用模擬數(shù)據(jù)的時(shí)頻域振幅相位信息來(lái)不斷地與觀測(cè)數(shù)據(jù)的時(shí)頻域振幅相位信息相匹配,則PA-LSRTM的目標(biāo)函數(shù)可以定義為
(C1)

(C2)

(C3)
將式(C3)代入式(C2)中,則目標(biāo)函數(shù)對(duì)模型參數(shù)的偏導(dǎo)數(shù)可以表示為
(C4)
(C5)
將式(C5)代入式(C4)中,則目標(biāo)函數(shù)對(duì)模型參數(shù)的梯度算子可以表示為
(C6)
(C7)
將式(A3)代入式(C7)中,目標(biāo)函數(shù)對(duì)模型參數(shù)的梯度可以簡(jiǎn)化為
(C8)
則伴隨震源可以定義為
(C9)
因此,PA-LSRTM目標(biāo)函數(shù)對(duì)模型參數(shù)的梯度與LSRTM梯度計(jì)算方法相同,只需將伴隨震源反傳至模型空間獲得的反傳波場(chǎng),并與正傳波場(chǎng)做零延遲互相關(guān).
附錄D
利用L-BFGS優(yōu)化算法計(jì)算模型參數(shù)的更新方向,其迭代公式為
mk+1=mk-αkΔm,
(D1)
其中mk為第k步模型參數(shù);αk為步長(zhǎng);Δm為模型參數(shù)的更新方向.關(guān)于LSRTM優(yōu)化過(guò)程,實(shí)際上就是尋找目標(biāo)函數(shù)最小值的過(guò)程.假設(shè)目標(biāo)函數(shù)的起始點(diǎn)與最小值點(diǎn)在一個(gè)微小的鄰域內(nèi),則LSRTM目標(biāo)函數(shù)的最小值點(diǎn)存在如下關(guān)系:
(D2)
舍去式(D2)中的高階項(xiàng):
(D3)
當(dāng)模型擾動(dòng)量較小的情況下(m+δm≈m),則模型參數(shù)的更新方向可以表示為
(D4)

(D5)
(D6)
sk=mk+1-mk,yk=gk+1-gk,
(D7)
其中Hk+1是根據(jù)向量對(duì){sk,yk}和Hk計(jì)算得到;Hkgk的乘積可以通過(guò)梯度gk與向量對(duì){sk,yk}之間一系列向量的內(nèi)積與向量的和來(lái)獲得的.其中的近似Hessian矩陣的逆Hk需滿足以下更新公式:
(D8)
因此,在L-BFGS 優(yōu)化算法中只需要保存少數(shù)的向量對(duì),即可獲得Hessian 矩陣逆的近似,大大提高了計(jì)算效率,同時(shí)很大程度上節(jié)約了計(jì)算機(jī)的內(nèi)存.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19