電能表用藍牙微型斷路器自動配對技術研究
2021-12-30 11:27:30熊德智張保亮熊素琴
自動化與儀表 2021年12期
熊德智,肖 宇,張保亮,熊素琴
(1.智能電氣量測與應用技術湖南省重點實驗室(國網湖南省電力有限公司供電服務中心(計量中心)),長沙 410004;2.湖南大學 電氣與信息工程學院,長沙 430070;3.中國電力科學研究院有限公司,北京 100085)
新一代電能表(IR46 模組化電能表)對數據通信要求越來越高,在我國現有的電能表技術體系里,電能表通信主要由通信模塊(電力線載波、微功率無線等)、RS485、紅外來實現,從實際應用來看,RS485 和紅外這兩種本地通信方式存在明顯的缺陷,如RS485 布線施工難、通信速度慢,紅外通信可靠性差、速率低等,這兩種技術明顯不適應新一代電能表技術的發展需求,急需一種高速、可靠的本地通信技術來替代RS485 和紅外,藍牙通信是一種較為理想的本地通信方式。
文獻[1]提出了一種在公共區域、家庭和辦公室環境中進行音頻廣播的方案,該方案使用適當的基于隨機方法的分析模型來找到最佳重傳次數,減少了不必要的重發和通道擁堵;文獻[2]提出了一種多跳實時BLE(MRT-BLE)協議,它是在BLE 之上開發的一種實時協議,它允許網狀網絡上的有限制的分組延遲,克服了藍牙網狀網絡規范不支持通過多跳網狀網絡進行實時通信的難題;文獻[3]開發了機會藍牙傳輸(OBT)方案,該方案使具有集成模塊的雙堆棧設備能夠利用WLAN 協議以前未使用的延遲時間,顯著提高了雙堆棧設備的吞吐量;文獻[4]建立了一個評估藍牙綜合性能的分析模型,例如信號碰撞概率,發現延遲,能耗等;文獻[5]開發了一種基于藍牙系統的低成本生命體征傳感器,成功監測被測人的心跳和呼吸;文獻[6]研究了使用12 種不同的監督學習算法對藍牙信號行為的表征,這是邁向基于指紋的定位機制發展的第一步,為了解各種算法在室內定位機制發展中的用途和功能提供了寶貴的見識;文獻[7]建立了基于藍牙智能技術的機器人互連通信框架,實現了機器人定位,優化了機器人任務,提高了工作效率;文獻[8]通過設計采用BLE 附帶的相同信道化的多頻譜接入方案,找到一種可以有效防止復雜頻譜干擾的解決方案;文獻[9]提出了一種基于藍牙技術的防盜系統解決方案,以幫助學生安全保存其有價值的物品。
1 總體設計
藍牙智能微型斷路器主要由MCU 模塊、藍牙通信模塊、ESAM 加密模塊、超低待機功耗電源、低壓差線性穩壓器、電機驅動模塊、直流電機、齒輪傳動機構、齒輪位置監測模塊、分合閘反饋模塊、手/自動模式切換模塊、斷路器本體等部分組成,總體設計方案如圖1所示。
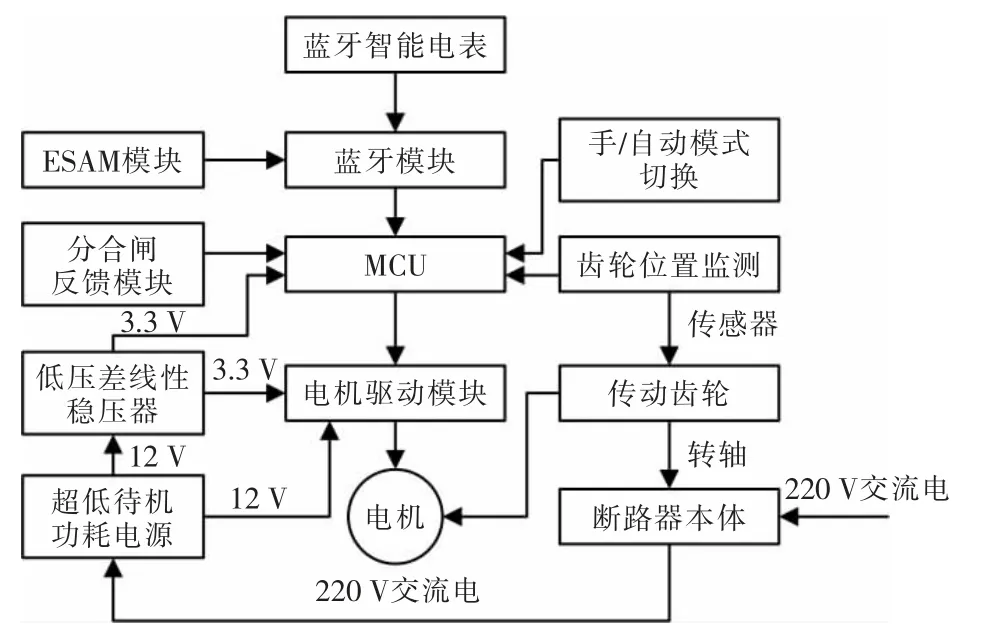
圖1 總體設計電路Fig.1 Overall design circuit
MCU 模塊負責接收藍牙模塊的控制命令并下發給傳動機構;藍牙通信模塊負責接收、發送藍牙智能電表、MCU 等的控制命令和反饋信息;ESAM加解密系統負責對藍牙模塊接收的控制命令進行解密處理,負責對向上發送的信息進行加密處理;超低待機功耗電源負責將220 V 交流電變換成12 V直流電,并提供給低壓差線性穩壓器,低壓差線性穩壓器將12 V 直流電變換成3.3 V 直流電,供MCU、藍牙模塊、電機驅動模塊等使用;電機驅動模塊負責執行MCU 的分合閘控制命令,通過直流電機和齒輪傳動機構驅動斷路器本體進行分合閘;齒輪位置監測模塊通過傳感器監測齒輪的位置信息,并上傳給MCU;分合閘反饋模塊負責監測斷路器出線電壓,并將信息反饋給MCU;通過手/自動模式切換,可實現斷路器在自動控制和手動控制方式之間的轉換。
2 自動配對關鍵技術研究
2.1 電流指紋技術研究
自動配對單元的通信接入采用工頻交流電源,電壓允許偏差為額定值的-20%~+20%;自動配對單元的電源由斷路器的主板提供,電壓為不大于5 V,電源電壓允許偏差為額定值的-10%~+10%。具體電流指紋特性如表1所示。

表1 電流指紋特性Tab.1 Current fingerprint characteristics
模塊的靜態功耗小于22 mW,正常工作的情況下有功功耗小于1 W,工作時無功功耗小于30 Var。
2.2 電流指紋模塊電路設計
電流指紋模塊通過電力線微電流和2.4 G 無線廣播的方式發送藍牙配對碼,當上端電能表通過電力線接收、解調得到的自動配對特征碼與其藍牙模塊接收、解調得到的自動配對特征碼一致時,可以初步確認該斷路器為電能表后安裝的從屬斷路器。電流指紋電路設計如圖2所示,電流指紋編碼規則如圖3所示。
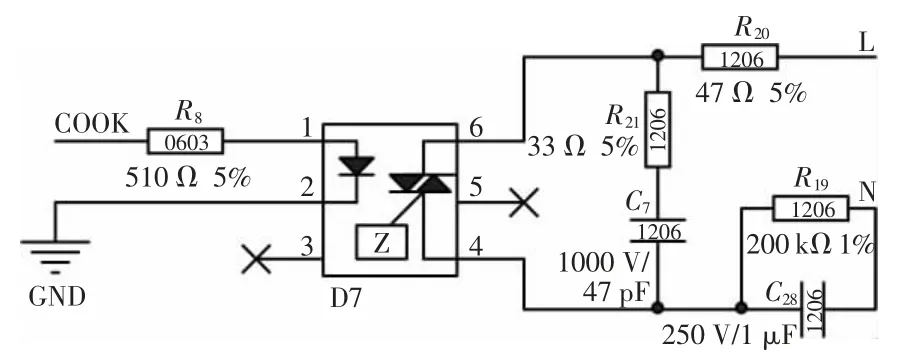
圖2 電流指紋電路Fig.2 Current fingerprint circuit
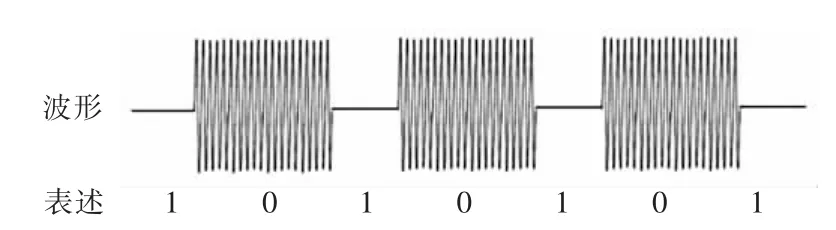
圖3 電流指紋編碼規則Fig.3 Current fingerprint coding rules
(1)采用OOK 調制方式,0 表示有電流,1 表示無電流。
(2)采用超高耐壓可控硅,外接一組高壓容性負載,按信息特征生成無功電流信號。
教師引導學生復習前幾課學習的關于結構穩定性方面的知識。包括:①不同結構所受到的力不同,穩定性也不同;②影響結構穩定性的因素;③結構的受力分析方法。教師播放微視頻,給學生介紹橋的類型、歷史以及構造。學生要考慮用什么知識(S)以及設備(T)完成設計任務。準備階段的實質是根據STEAM教育活動主題,完成相關知識、素材與工具準備。該階段最好由學生獨立完成,教師適當引導,幫助學生在學會應用所學知識的基礎上發展獨立思考、選擇資源工具與解決問題的能力。
(3)當需要和電表發送信息時,通過可控硅的開通、關斷操作,間歇產生30 mA~100 mA 的無功電流,形成相應信息的電流指紋編碼。
(4)通過設計R21和C7等,形成對調制電路的保護,降低沖擊電壓對器件的影響和損壞。
2.3 配對模塊信息交互設計
2.3.1 與藍牙模塊交互設計
自動配對功能模塊與藍牙模塊交互設計如圖4所示。自動配對功能模塊與藍牙模塊的交互需要經過消息路由。當自動配對功能模塊需要發送命令給藍牙模塊時,通過基礎應用APP 和消息路由通信接口,將命令發送給消息路由APP,消息路由APP 通過底層驅動將命令發給藍牙模塊。當藍牙模塊需要將接收到的報文發送給配對模塊時,消息路由先收到藍牙模塊發送的報文,消息路由將報文發送到基礎應用APP,基礎應用APP 收到消息路由消息后,將報文解析分發給自動配對功能模塊。
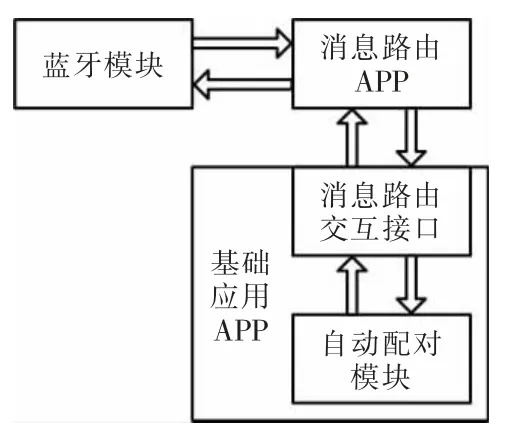
圖4 自動配對功能模塊與藍牙模塊交互Fig.4 Automatic pairing function module interacts with bluetooth module
2.3.2 與計量芯交互設計
自動配對功能模塊與計量芯交互設計如圖5所示。自動配對功能模塊與計量芯的交互需要經過消息路由。當自動配對功能模塊需要通知計量芯時,通過基礎應用APP 和消息路由通信接口將命令發送給消息路由APP,消息路由APP 通過底層驅動將命令發給計量芯。當去讀取計量芯數據時,計量芯先把數據發給消息路由,由消息路由再發給基礎APP,基礎APP 收到后解析分發給自動配對功能模塊。

圖5 自動配對功能模塊與計量芯交互Fig.5 Automatic pairing function module interacts with metering core
2.4 霍爾監測電路設計
霍爾監測電路如圖6所示。電路主要通過霍爾元器件對觸頭實際位置進行監測,通過MOS 管對霍爾傳感器電源進行控制,降低斷路器在待機模式下的功耗。
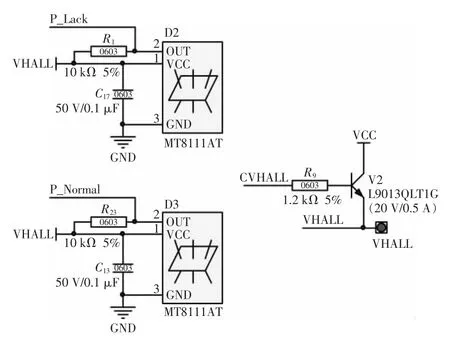
圖6 霍爾監測電路Fig.6 Hall monitoring circuit
當斷路器要進入低功耗狀態時,CPU 輸出低電平,控制V2 進入關閉狀態,霍爾傳感器電源斷開,進行休眠狀態。當斷路器要進入監測狀態時,CPU輸出高電平,V2 導通,霍爾傳感器電源接通,進入工作狀態。
D2 和D3 為霍爾傳感器,通過檢測齒輪內嵌磁鐵的磁場強度,實現觸頭和操作手柄位置的判斷。當霍爾傳感器檢測到磁鐵的磁場,霍爾傳感器的2腳會輸出高電平狀態,CPU 通過檢測到霍爾傳感器的反饋信號,從而控制電動機進行正反轉控制。
3 自動配對流程設計
自動配對流程如圖7所示,具體配對步驟如下:
步驟1藍牙微型斷路器產生一個16 位隨機數作為自動配對特征碼(稱為“配對特征碼1”);
步驟2藍牙微型斷路器以無功電流方式,將自動配對特征碼調制信號發送到電纜線上;
步驟3同時,藍牙微型斷路器使用藍牙廣播發送自動配對特征碼;
步驟4電能表初始化后檢查從機列表,檢測斷路器從機未設置時發起自動尋找表后斷路器。開始采樣記錄電流數據,電流數據采樣足夠時通過算法解調自動配對特征碼;
步驟5電能表藍牙模塊掃描藍牙廣播,當藍牙掃描到一個或多個廣播包中自動配對特征碼與電纜線上的自動配對特征碼一致時,記錄藍牙微型斷路器地址。掃描一定時間后得到一個可能為電能表后安裝的藍牙微型斷路器列表,連接其中一個藍牙微型斷路器;
步驟6電能表產生16 位隨機數作為新的自動配對特征碼(稱為“配對特征碼2”),并發送更改自動配對特征碼命令到藍牙微型斷路器;
步驟7藍牙微型斷路器接收命令后,將在電纜線上發送的數據更改為新的自動配對特征碼,也就是“配對特征碼2”,并回復電能表更改完成;
步驟8電能表收到回復后,再次采樣記錄電流數據,電流數據采樣足夠時通過算法解調出自動配對特征碼2;
步驟9當電能表通過解析無功微電流數據得到的自動配對特征碼,與其產生的自動配對特征碼一致時,可以確認該斷路器為電能表后安裝的斷路器,存儲該斷路器地址;
步驟10當電能表再次解調得到的自動配對特征碼與新的自動配對特征碼不一致時,斷開連接的藍牙微型斷路器并在掃描列表中刪除該藍牙微型斷路器地址,設置連接下一個藍牙微型斷路器并轉到步驟6。如果掃描列表為空則認為自動尋找表后斷路器失敗。
4 結語
文中針對新一代電能表通過藍牙進行表后開關費控的需求,綜合分析了基于藍牙技術的現有研究和應用,明確了自動、精準配對是電能表藍牙微型斷路器需要攻克的關鍵難題。本文提出了藍牙智能微型斷路器的總體設計方案,規定了各功能模塊的主要作用。提出了基于電流指紋技術的精準配對方法,給出了電流指紋特征,設計了電流指紋模塊及特征碼編碼方式,為藍牙電能表與所屬藍牙微型斷路器之間的自動精準配對提出了可行方案。本文提出了配對模塊與藍牙模塊、計量芯片之間的信息交換方法,設計了基于霍爾傳感器的開關觸頭位置監測電路,設計了藍牙電能表與藍牙微型斷路器之間的自動配對原理及流程,實現了藍牙電能表與所屬藍牙微型斷路器之間的自動精準配對,解決了電能表用藍牙微型斷路器自動、精準配對的技術瓶頸,為藍牙微型斷路器的推廣應用奠定了堅實的基礎。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國廣播(2016年11期)2016-12-26 10:02:01
軟件導刊(2016年9期)2016-11-07 21:35:42
科技視界(2016年11期)2016-05-23 12:04:33
通信電源技術(2016年5期)2016-03-22 01:09:49
石油知識(2016年2期)2016-02-28 16:20:16
