基于ARM的時(shí)變頻率測(cè)量算法設(shè)計(jì)
2021-12-30 11:27:18黨存祿陳國(guó)國(guó)
自動(dòng)化與儀表 2021年12期
黨存祿,陳國(guó)國(guó)
(蘭州理工大學(xué) 電氣工程與信息工程學(xué)院,蘭州 730050)
國(guó)家規(guī)范對(duì)電力系統(tǒng)的頻率有著嚴(yán)格的要求,一般情況下頻率的偏差值為±0.2 Hz,它反映的是系統(tǒng)有功功率的平衡[1]。風(fēng)力發(fā)電和光伏發(fā)電的裝機(jī)容量越來(lái)越大,但是在這些新型能源系統(tǒng)中,頻率是不穩(wěn)定的,是隨著時(shí)間不斷變化的[2]。例如:負(fù)載波動(dòng)引起的有功功率不平衡,系統(tǒng)發(fā)生各種故障時(shí),也會(huì)引起有功功率的不平衡。波動(dòng)的頻率不僅會(huì)影響到其測(cè)量的準(zhǔn)確性,而且有可能會(huì)使低頻減載裝置誤動(dòng)作或拒動(dòng)[3]。
在新能源系統(tǒng)中,頻率的測(cè)量主要由嵌入式微機(jī)系統(tǒng)來(lái)實(shí)現(xiàn)[4]。隨著科學(xué)技術(shù)的發(fā)展,新能源系統(tǒng)中各種自動(dòng)裝置對(duì)系統(tǒng)頻率的測(cè)量精度要求日趨嚴(yán)格[5]。當(dāng)前,離散傅里葉變換(DFT)、快速傅里葉變換(FFT)以及過(guò)零點(diǎn)測(cè)頻算法是嵌入式裝置中普遍使用的軟件測(cè)頻算法[6]。其中DFT 測(cè)頻算法當(dāng)采樣點(diǎn)數(shù)比較少時(shí),會(huì)發(fā)生頻譜泄漏和柵欄效應(yīng)[7],并且高次諧波對(duì)其影響很大,對(duì)以上的問(wèn)題后期進(jìn)行了各種各樣的改進(jìn)算法,其中加窗函數(shù)修正的DFT 測(cè)頻算法[8]存在主要的問(wèn)題是它的實(shí)時(shí)性達(dá)不到預(yù)計(jì)的要求;文獻(xiàn)[9]結(jié)合插值和迭代的優(yōu)點(diǎn)得到的DFT測(cè)頻算法計(jì)算復(fù)雜,反應(yīng)周期長(zhǎng),不利于應(yīng)用到嵌入式裝置中。
基于頻率的變化率,本文提出了時(shí)變頻率測(cè)量算法,解決了頻率隨時(shí)間變化時(shí),現(xiàn)有的測(cè)頻方法精度不高、誤差大、計(jì)算復(fù)雜等問(wèn)題。首先把原始的信號(hào)送入濾波器進(jìn)行濾波,濾除信號(hào)中所含的高次諧波、直流分量和噪聲;然后在每一段小區(qū)間內(nèi)對(duì)濾波后的信號(hào)采用過(guò)零點(diǎn)檢測(cè)算法[10]進(jìn)行頻率值的計(jì)算,將所得到的頻率值作為最小二乘非線性曲線擬合的迭代初值,在每一段小區(qū)間內(nèi)進(jìn)行正弦曲線擬合;最后對(duì)擬合后的曲線以調(diào)整采樣頻率的方式對(duì)其進(jìn)行二次采樣,將所得到的二次采樣數(shù)據(jù)進(jìn)行動(dòng)態(tài)頻率測(cè)量算法計(jì)算頻率,解決現(xiàn)有的算法計(jì)算量大、測(cè)量精度不高和占用內(nèi)存大等問(wèn)題。
1 頻率算法的基本原理
1.1 濾波器的設(shè)計(jì)
在實(shí)際運(yùn)行的電力系統(tǒng)中,信號(hào)波形往往不是標(biāo)準(zhǔn)的正弦曲線,其中夾雜著高次諧波、直流分量以及各種噪聲的復(fù)雜曲線[11];系統(tǒng)正常運(yùn)行時(shí),頻率在50 Hz 左右波動(dòng),其中的諧波頻率也在隨著工頻不斷變化[12],這就給頻率的準(zhǔn)確測(cè)量帶來(lái)了很大的測(cè)量誤差,因此需要設(shè)計(jì)濾波器。
本文采用基于巴特沃斯型帶通濾波器的設(shè)計(jì)[13]來(lái)濾除原始信號(hào)中所含的噪聲和諧波,文中主要設(shè)計(jì)參數(shù):通帶范圍為45~55 Hz,通帶上限為60 Hz,通帶下限為40 Hz,通帶最大衰減為2 dB,阻帶最小衰減為15 dB。帶通濾波器頻率響應(yīng)如圖1所示。
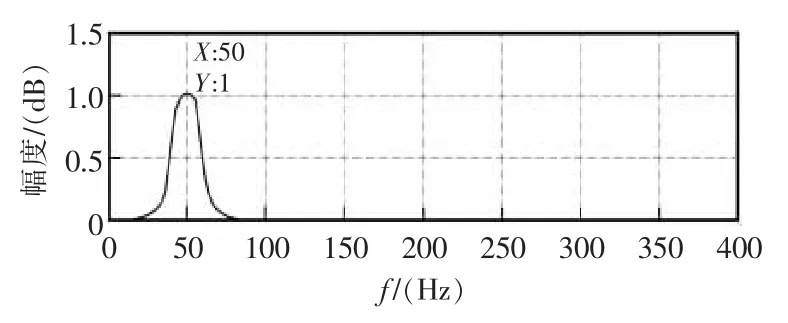
圖1 帶通濾波器頻率響應(yīng)Fig.1 Frequency response of bandwidth filter
分析圖1可得,當(dāng)信號(hào)經(jīng)過(guò)這款濾波器后,信號(hào)中的高次諧波分量和直流分量的衰減接近于0,最后只剩下50 Hz 附近的頻率可以通過(guò)濾波器。從而濾除掉原始信號(hào)中摻雜的直流分量和高次諧波分量,減小其對(duì)基波信號(hào)的干擾。
信號(hào)中不僅含有以上對(duì)信號(hào)的干擾項(xiàng),而且含有各種隨機(jī)噪聲,帶通濾波器不可能把所有的干擾項(xiàng)全部濾除,經(jīng)過(guò)濾波器濾波后的信號(hào)中仍然含有一部分噪聲,這些未被濾除的噪聲很容易產(chǎn)生頻率泄漏,所以還要對(duì)信號(hào)的噪聲進(jìn)行處理。
1.2 基于列文伯格-馬夸爾特的最小二乘非線性曲線擬合原理
濾波后的信號(hào)中仍然含有部分的噪聲信號(hào),這些噪聲信號(hào)很容易造成頻率的泄漏[14],這就在很大程度上影響了現(xiàn)有測(cè)頻算法的測(cè)量精度。
本文運(yùn)用基于列文伯格-馬夸爾特的最小二乘非線性曲線擬合[15]方法對(duì)濾波后的信號(hào)進(jìn)行正弦曲線擬合。其基本原理為在濾波后信號(hào)的每段區(qū)間Vi中把濾波后的信號(hào)擬合成標(biāo)準(zhǔn)的正弦曲線Yi,表示為

式中:Yi為第i 段的標(biāo)準(zhǔn)正弦擬合函數(shù)。
標(biāo)準(zhǔn)正弦擬合函數(shù)的各種參數(shù),如相角、幅值和頻率的最優(yōu)值采用列文伯格-馬夸爾特方法來(lái)獲得,其中的初始值設(shè)為0.01。為了減小迭代次數(shù),把迭代頻率的初始值設(shè)為過(guò)零檢測(cè)算法所得的頻率值,取0~π 中的任意值作為相角θ 的值。假如得到的參數(shù)值不在合理范圍值之內(nèi),重新調(diào)整θ 的值對(duì)參數(shù)進(jìn)行優(yōu)化估計(jì),直至參數(shù)值在合理范圍值之內(nèi)。最后對(duì)擬合后的正弦曲線進(jìn)行二次采樣,進(jìn)一步去除信號(hào)中的各種噪聲,從而提高頻率測(cè)量的算法精度。
1.3 頻率變化率與周期的關(guān)系
首先假設(shè)被測(cè)信號(hào)的幅值是Um,頻率為f,相角是φ(f,t),那么信號(hào)的表達(dá)式可以表示為

如果f 是隨時(shí)間變化的,那么f 的一階導(dǎo)數(shù)肯定不為零,則每一時(shí)刻的相角φ(f,t)可以表示為

式中:ω=2π f 是角頻率;dω/dt 是角加速度;φ0是零時(shí)刻(t=0)的初始相角;ω0=2π f0是零時(shí)刻的初始角速度,f0為初始頻率。以緊鄰3 個(gè)過(guò)零點(diǎn)處的相位角為研究對(duì)象,如圖2所示。
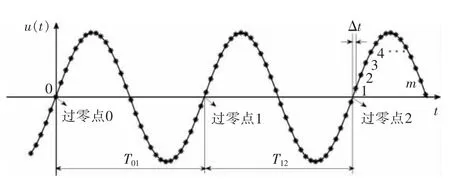
圖2 信號(hào)波形與過(guò)零點(diǎn)示意圖Fig.2 Signal waveform and zero crossing diagram
把過(guò)零點(diǎn)0 設(shè)置為起始點(diǎn),則在t=0 處,相角φ0=0,頻率為f0。在過(guò)零點(diǎn)1 處,相角為2π,過(guò)零點(diǎn)2 處,相角為4π。
由式(3)得:
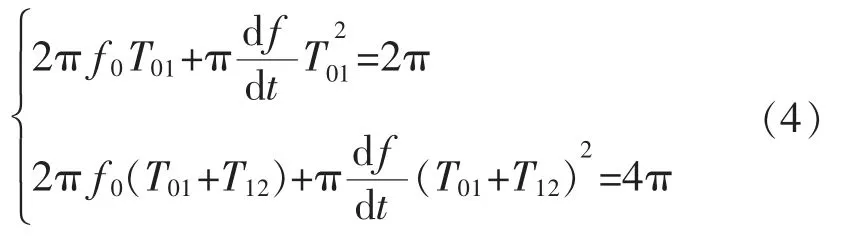
解得:

其中:

由式(5)和式(6)可以求出頻率的變化率d f/dt和過(guò)零點(diǎn)0 處的初始頻率f0。
根據(jù)以上所求得的結(jié)果可以計(jì)算出每一時(shí)刻的頻率。如圖2所示,假設(shè)過(guò)零點(diǎn)2 為最新的過(guò)零點(diǎn),采樣點(diǎn)m 為當(dāng)前時(shí)刻的采樣點(diǎn),過(guò)零點(diǎn)2 到當(dāng)前時(shí)刻之間的采樣值個(gè)數(shù)為m,因此當(dāng)前時(shí)刻的頻率為

式中:Δt 是過(guò)零點(diǎn)2 與采樣點(diǎn)1 之間的時(shí)間;Ts為相鄰兩個(gè)采樣點(diǎn)之間的時(shí)間,即采樣時(shí)間間隔。
1.4 計(jì)算周期T
1.4.1 Δt 的計(jì)算
如圖2,在采樣的時(shí)候信號(hào)的過(guò)零點(diǎn)經(jīng)常并不一定與采樣點(diǎn)重合,要準(zhǔn)確求出周期T,則必須首先要求出過(guò)零點(diǎn)與過(guò)零點(diǎn)后的第一個(gè)采樣點(diǎn)之間的時(shí)間Δt。
對(duì)于信號(hào)的真正過(guò)零點(diǎn)是沒有辦法直接求解出來(lái)的,但是可以通過(guò)其他的方法近似求解,比如,可以把零點(diǎn)附近的波形看作是直線,然后采用相似三角行的方法來(lái)求解[16]。
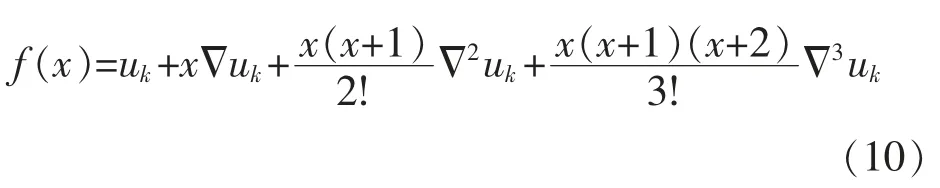
為了解決相似三角形方法解得的過(guò)零點(diǎn)值精度不高的問(wèn)題,本文采用牛頓多項(xiàng)式[17]f(x)來(lái)逼近:

接下來(lái)就是計(jì)算式(8)的各項(xiàng)系數(shù)即a0,a1,a2,a3。
如圖3所示,依據(jù)式(8),從眾多的采樣點(diǎn)中取4 個(gè)采樣點(diǎn),分別為過(guò)零點(diǎn)之后的第一個(gè)采樣點(diǎn)(tk,uk),過(guò)零點(diǎn)之前的三個(gè)采樣點(diǎn)(tk-1,uk-1)、(tk-2,uk-2)、(tk-3,uk-3)。根據(jù)這4 個(gè)采樣值可以建立向后差分表[18],見表1。
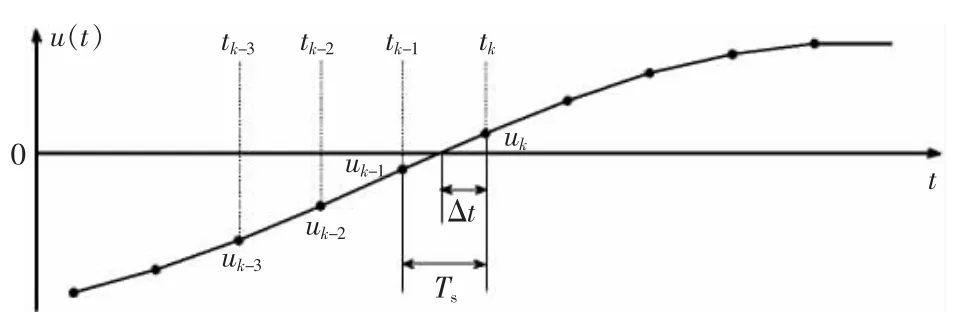
圖3 牛頓插值多項(xiàng)式示意圖Fig.3 Schematic diagram of Newton interpolation polynomial
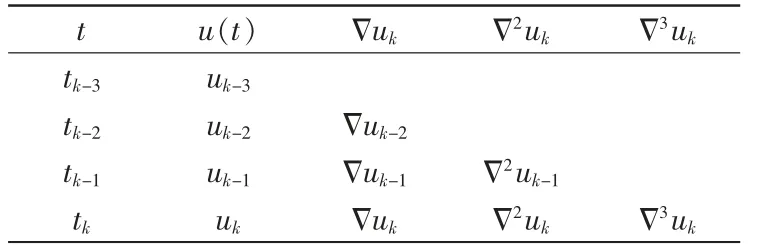
表1 牛頓向后差分表Tab.1 Newton backward difference table
其中,
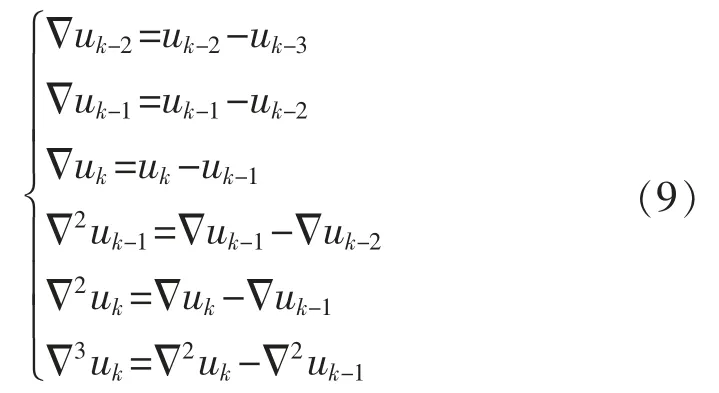
則,式(8)又可表示為
x 與Δt 之間的關(guān)系式為

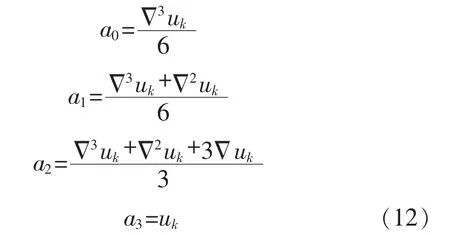
從而求得式(8)的各項(xiàng)系數(shù)如下:
令f(x)=0,求解牛頓三次插值多項(xiàng)式過(guò)零點(diǎn):

利用牛頓迭代方法求取f(x)=0 的根:
為了減少迭代的次數(shù),首先采用相似三角形的方法求出迭代初值x0,見圖4所示,由相似三角形原理可得:
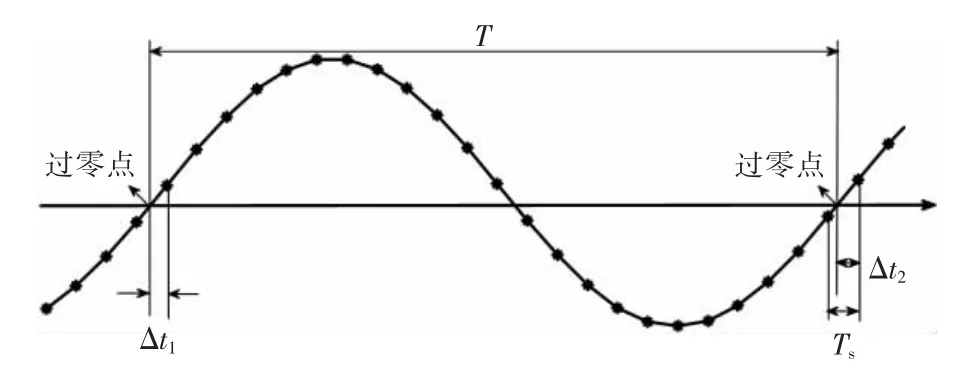
圖4 計(jì)算過(guò)零點(diǎn)時(shí)間方法示意圖Fig.4 Schematic diagram of method for calculating zero crossing time

把Δt=-xTs代入式(16),可得:

所以迭代初值可以取為

當(dāng)?shù)冗_(dá)到所要求的精度時(shí)可以得到x 的值,最后計(jì)算出Δt=-xTs的值。
1.4.2 周期T 的計(jì)算
假設(shè)兩個(gè)緊鄰過(guò)零點(diǎn)之間的采樣點(diǎn)數(shù)為N,那么周期T 的計(jì)算公式為

式中:Δt1和Δt2是過(guò)零點(diǎn)與過(guò)零點(diǎn)之后第一個(gè)采樣點(diǎn)之間的時(shí)間值。
2 算法的實(shí)現(xiàn)過(guò)程
(1)對(duì)過(guò)零點(diǎn)的判斷。當(dāng)uk*uk-1<0 時(shí)在uk與uk-1之間必有一個(gè)零點(diǎn)。
(2)按式(9)、式(12)計(jì)算擬合函數(shù)f(x)的系數(shù)a0~a3。
(3)求解過(guò)零點(diǎn)。首先依據(jù)式(18)算出迭代初值,再根據(jù)式(8)、式(13)、式(14)計(jì)算出過(guò)零點(diǎn)的近似解x 的值。
(4)當(dāng)前周期T 的計(jì)算。利用式(11)計(jì)算出Δt的值,再根據(jù)式(19)得到當(dāng)前周期T。
(5)最后計(jì)算采樣點(diǎn)處的頻率。采用式(7)計(jì)算頻率f。
3 算法的仿真
接下來(lái)分別對(duì)標(biāo)準(zhǔn)正弦波信號(hào)、含高次諧波和噪聲、頻率波動(dòng)情況下,對(duì)本文提出的算法進(jìn)行MATLAB 仿真,將仿真所得的結(jié)果與文獻(xiàn)[19]中的DFT 算法和文獻(xiàn)[20]中的過(guò)零點(diǎn)算法進(jìn)行比較,以驗(yàn)證本算法的優(yōu)越性。
3.1 標(biāo)準(zhǔn)正弦波
設(shè)標(biāo)準(zhǔn)正弦信號(hào)的數(shù)學(xué)模型為u(t)=Umsin(2π ft+φ),頻率f 取45~54 之間,φ 角隨機(jī)選取。測(cè)量數(shù)據(jù)如表2所示。
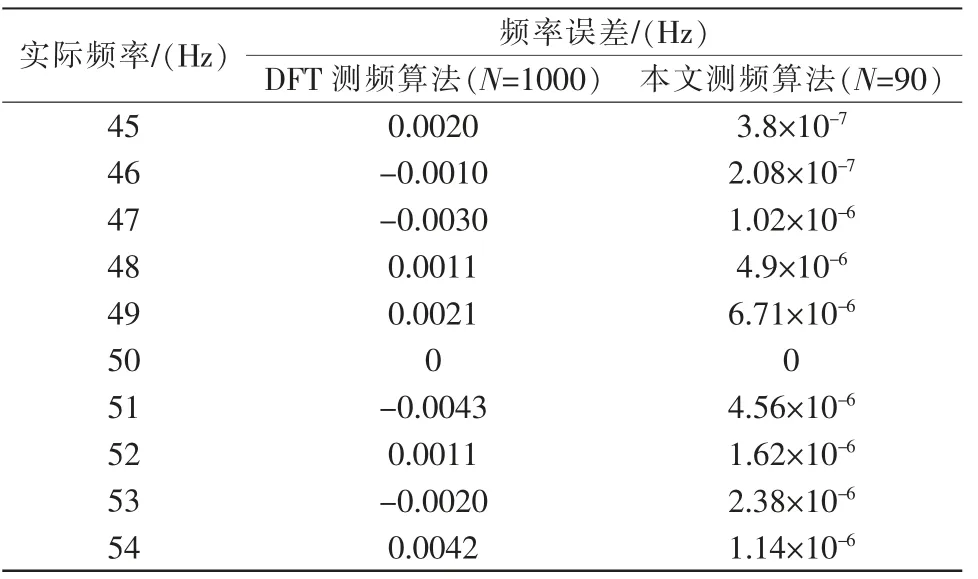
表2 標(biāo)準(zhǔn)正弦信號(hào)下的頻率誤差Tab.2 Frequency error under standard sinusoidal signal
3.2 含有噪聲和諧波
設(shè)含有噪聲和諧波信號(hào)的數(shù)學(xué)模型為

頻率f 取45~54 之間,φ 角隨機(jī)選取,ξ 為50 dB的白噪聲。測(cè)量數(shù)據(jù)如表3所示。
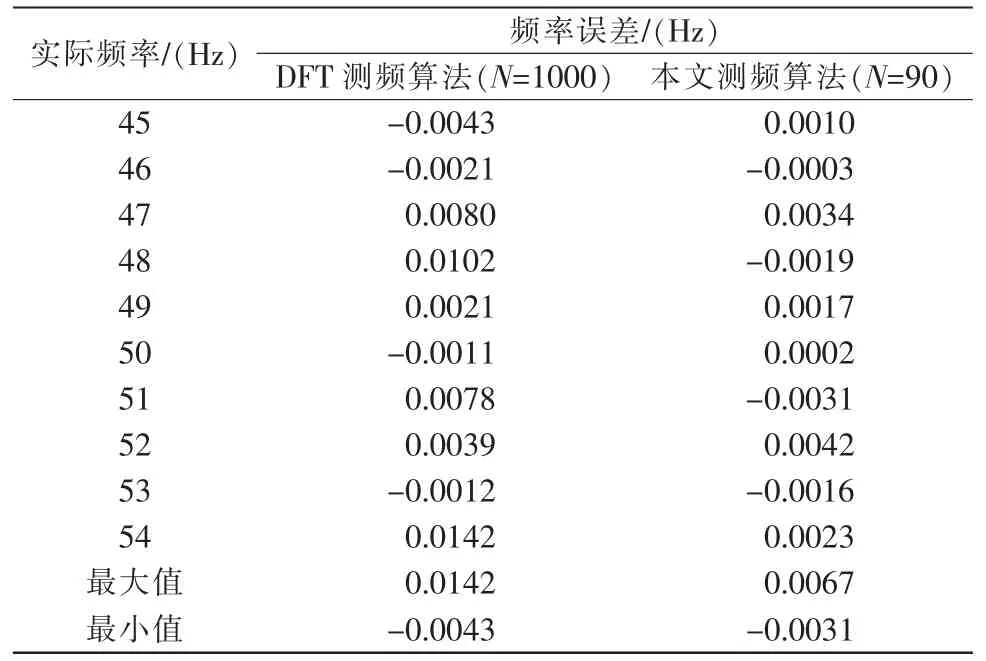
表3 含有噪聲和諧波信號(hào)下的頻率誤差Tab.3 Frequency error with noise and harmonic signal
3.3 頻率發(fā)生波動(dòng)
對(duì)發(fā)電機(jī)啟動(dòng)過(guò)程的頻率進(jìn)行模擬,取開始的頻率為35 Hz,初始相角為-10°,頻率變化率10,那么頻率和輸入電壓信號(hào)模型為
式中:ω0=2π f0;ω=2π f。測(cè)量數(shù)據(jù)如表4所示。
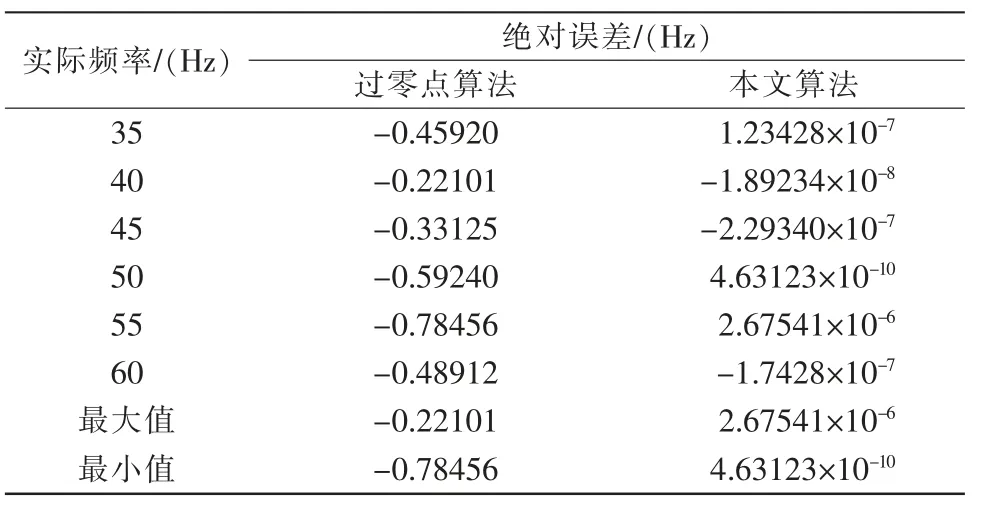
表4 頻率發(fā)生波動(dòng)時(shí)的頻率誤差Tab.4 Frequency error in case of frequency fluctuation
4 結(jié)語(yǔ)
在頻率發(fā)生波動(dòng)的條件下,以緊鄰兩個(gè)過(guò)零點(diǎn)之間的相位為依據(jù),推算出了每一時(shí)刻頻率的數(shù)學(xué)表達(dá)式,從而提出了一種動(dòng)態(tài)頻率測(cè)量算法。本算法原理簡(jiǎn)單,實(shí)驗(yàn)仿真結(jié)果表明,本文算法在標(biāo)準(zhǔn)正弦信號(hào)下的頻率測(cè)量精度達(dá)到10-6Hz 級(jí),在含有噪聲和諧波信號(hào)下的頻率測(cè)量精度可達(dá)10-3Hz 級(jí),在頻率波動(dòng)下的頻率測(cè)量精度達(dá)到10-4Hz 級(jí)。
本文算法測(cè)量頻率的精度高、測(cè)量范圍廣、計(jì)算速度快、能有效地抵抗噪聲的干擾、在算法的準(zhǔn)確性和穩(wěn)定性方面有所提高,驗(yàn)證了本算法的可行性和有效性,解決了頻率波動(dòng)條件下,頻率測(cè)量精度不高、計(jì)算量大、占用嵌入式內(nèi)存大等問(wèn)題。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
