基于無人機影像的輸電線路監測數據可視化模型
2021-12-30 03:06:46國網山東省電力公司泰安供電公司
電力設備管理 2021年12期
國網山東省電力公司泰安供電公司 陳 強
隨著智能電網的建設推進,在接入電力系統的業務數據數量逐漸增加,對電力系統的有效管理造成了較大的安全隱患,一旦其中某個業務板塊出現數據故障會嚴重影響電力系統的運行,造成巨大經濟損失。原有電力運行監測對故障點缺少實時性,基本采用后補式處理方法,在逐漸擴大的電力規模下較為單一態勢分析,無法滿足現下電力系統的運行維護。可視化能將簡單的符號描繪轉換成具象化的集合描述,在信息處理過程中提供更便于理解和記憶的圖像。在科學手段越來越成熟的發展下,利用無人機進行影像獲取,能等效還原預測區域與實測信息的精準關系,在像控點數的幫助下幾乎不會在平面或立體空間內造成差別影響。
在國外發達國家早已完成了無人機可視化平臺的研發,具備三位一體的數據處理和制圖分析功能,能將海量的復雜數據進行多方位展示。國內對無人機技術的研究起步較晚,通過資源三號衛星的發射至此開啟高分辨率立體測繪的新時代,以無人機為載體的基礎上,在軍事和航天領域完成了多個定位目標和跟蹤任務。本文在無人機影像基礎上對輸電線路檢測數據建立可視化模型,用于大量電力數據的邏輯化圖形展示,加強對數據信息的接收和表達,為電力行業的安全發展提供可靠依據。
1 基于無人機影像的輸電線路監測數據可視化模型
1.1 無人機影像定位輸電線路坐標
根據無人機航飛的特點,在保證其能夠完成加速起飛后,對需監測的輸電線路進行區域劃分,使無人機發射和回收的場地不受到空間限制,以此定位能夠接收數據的航拍坐標[1]。一般其發射的主要方式包括滑跑和彈射兩種,在配套設施較少地段可進行滑跑,加載所需速度負載較小,能在比較簡單的操作下完成安全飛行。在完成起飛任務后對需測量的地域進行坐標系劃分,主要為兩大類,一是用于拍攝點位描述的位置,稱為像方位空間坐標,另一類是描述地面對應點位的位置,稱為物方位空間坐標。像方位空間坐標由像平面坐標、空間坐標以及輔助坐標構成,通常用右側坐標表示像點在像平面上的位置,實現像與物空間相對過渡性的統一[2]。物方位的空間坐標由攝影與地面測量坐標系組成,主要是在點位反方向平移中將監測物投影至坐標系中,實現實際測量與地面測量的過渡性轉換。在定位坐標設置完成后,確定投影光束的瞬時位置以描述各類投影圖像的空間姿態,需要包括三個直線元素和角元素,便于圖像產生誤差后及時進行校正。
1.2 畸變差校正影像匹配監測數據
受無人機低空航行的誤差取像影響,在傳感器發生的影像中會產生畸變,所得結果和實際監測數據無法完成匹配,需要進行相機內部的方位參數校正[3]。通過確定畸變來源分類完成不同狀態的校正方式選取,基本上有系統和隨機誤差兩種,有視頻轉化為數字影像的錯位或影像奇數行和偶數行的錯位引起。在相機主距和線路坐標(xi,yi)中定位,以共線方程為誤差校正計算方式:
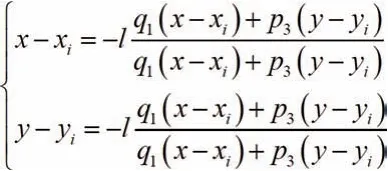
式中:實際產生畸變的定位變量用q 表示,主點不動剩余定位點的畸變量用p 表示,在未知動量坐標系中若影響畸變過大,可加入改正差值進行替換[4]。當影像主點無需向遠離點方向移動時,表示該影像畸變誤差校正完畢能夠找到對應定位坐標,完成輸電線路中數據的監測相匹配。
1.3 場景裁剪構建可視化模型
可視化就是在科學計算基礎上對多維的數據空間完成結構輸出的抽象轉化,利用計算機自帶的支持工具和手段使監測到的數據更直觀地表達。為加強拍攝畫面的渲染氣氛利用場景裁剪的方法,對只出現在相機視景體中的影像和場景進行更新,保留樹結構中遠近加載不同數據的分辨率。在可視化過程中需對數據包圍的結構進行比較,判斷出現在相機視景體中的數據類型,進而刪除掉不在遠景可見區域的三要素[5]。對不可見區域需進行背面和視景體裁剪,相對于相機視角來講,在沿視點出發的線路上觀測到的場景面片,若面片頂點順序為逆時針走向則視為正面,若頂點走向沿順時針排列為背面。其次若面片中的一個側面被遮擋需對另一面進行刪除,保留裁剪過程中光影階段的面片圖像。至此在定位輸電線路坐標和校正畸變誤差的基礎上,利用場景裁剪對線路數據進行整合,完成監測數據可視化模型的構建。
2 實驗結果分析
2.1 實驗準備
為驗證此次設計的可視化模型具有實際監測效果,采用實驗測試的方式對輸電線路中即時容災數據進行監測,選取某省多條常態運行下的輸電線路,將其在實際輸電過程中產生的20萬組數據進行備份,其中包括6000組容災運行異常現象。將復制好的運行狀態在搭建的測試平臺中進行監測,在實驗開始前需對無人機進行參數選取,并將標定位置作出設定,具體參數如下:型號。大疆Pro 自帶鏡頭;影像分辨率。寬高3:2比5742×3846、寬高4:3比4648×3486、寬高16:9比5742×3406;有效像素2000萬;機械與電子快門速度。6~1/2000s、6~1/6000s;適宜工作溫度40℃以下;傳感器類型CMOS1英寸。
此次選取的無人機能夠完成自動對焦和拍攝功能,在MATLAB 相機標定工具箱內進行輸電線路的定位盤位置標定。在導入所有拍攝圖像后選取影像焦點,共得到拍攝圖像32張,其中8張圖像被拒絕無法參與標定,在剩余24張圖像中分列出8個控制坐標點,進行輸電線路容災運行的異常數據監測。
2.2 可視化監測過程
此區域輸電線分布較為分散,在對測試區進行航拍飛行時僅采用一個角度無法定位全部坐標點,分別對傳輸至總線路的輸電子站進行多角度結合控制,以保證此時實驗測試的精準度。航高設置為150m 高度,輸電線分辨率可以到5m,航向與旁向重讀率在65%以內,通過垂直攝影和三個角度的傾斜攝影完成測試點的坐標位置布控,測量比例為1:2000,8個點位具體位置(X/Y/Z 軸)分別為:5052.21/1724.06/243.23、5055.42/1731.14/245.07、5058.16/1735.24/259.34、5062.03/1742.15/261.31、5065.54/1745.31/254.52、5054.23/1726.18/254.96、5067.42/1732.46/261.37、5072.38/1734.62/264.06。
根據控制點坐標分布走向,對布控位置進行實際區域的測量圖像標記,受控制點必須保證三張以上圖片的原則,此次坐標位置選定方案完全符合,不需要進行剔除和刺點。如圖1所示,在多條輸電線路監測圖像拍攝中,設置的標定坐標系基本處于相片內,每一個相控點均可以多個相連點位組成連線。提取備份數據進行坐標點位分配,在每組坐標中安置15000組電力數據,所有容災異常數據會均勻分布在各組數據中。

圖1 輸電線測試區域影像標定顯示
2.3 異常數據結果分析
為進一步驗證本文模型能夠在容災現象發生時全面監測異常數據,引入兩組傳統模型進行對比,監測時間控制在5min 以內。在各組定位坐標電力數據中異常數據為500組,分別對每組坐標進行監測,8個點位的本文模型、交互模型、DNS 網絡模型分別為:500/412/438、499/415/450、500/472/459、500/426/461、499/425/454、500/433/454、500/422/434、500/470/462。據此可知,本文設計的模型在容災現象發生時,基本全面覆蓋點位坐標完成異常數據檢測,兩組傳統模型對異常數據的監測平均為434組和451組,較本文方法少了66組和49組。綜合結果來看,本文模型能在輸電線路發生容災現象時完成區域坐標點位布局,并完成基本異常數據的監測,維護輸電線路的穩定運行。
綜上,由于研究時間和能力有限在整個過程中存在些許不足,如在無人機航行線路較低時,對像控點的布設和測量能夠形成精度指標沒有提出假設和研究,無法確定在精度變化較大情況下能夠在實際測量場地完成工程作業。后續會對低航線飛行期間的線路進行有效繪畫,按照實際測量區域的走向進行像控點布設,選取更精準的比例尺度,對具體數據進行具體分析,加強電力數據可視化模型的深入研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
數學物理學報(2020年2期)2020-06-02 11:29:24
傳媒評論(2019年4期)2019-07-13 05:49:14
光學精密工程(2016年6期)2016-11-07 09:07:19
