可樓梯行走的變容式便攜物流周轉箱設計
2021-12-28 15:09:38胡曉穎李洋高士雅王新宇
森林工程 2021年6期
關鍵詞:結構設計
胡曉穎 李洋 高士雅 王新宇
摘?要:為減輕工作人員勞動強度,本文設計一種可樓梯行走的變容式便攜物流周轉箱,用于末端物流配送環節。根據物流周轉箱的應用需求,設計箱體結構及主要機構,包括變容與折疊機構、行星輪組行走機構、拉桿伸縮與旋轉機構,以實現裝置主要功能;利用CREO軟件建立模型,并應用ANSYS軟件對箱體進行結構有限元分析,應用ADAMS軟件進行樓梯行走運動仿真,設計出可實現特定功能的物流周轉箱。結果表明,箱體的強度與剛度滿足載物要求;變容機構中的限位螺釘作為關鍵受力部件,強度與剛度滿足使用要求,可承受徑向沖擊力作用;通過多次運動仿真確定行星輪組最優化結構尺寸,且滿足運動穩定性要求。該物流周轉箱的設計可實現多種功能,滿足于末端物流配送環節及城市共同配送模式,也可適用于零售業、家庭等多種使用場景。
關鍵詞:物流周轉箱;變容;樓梯行走;結構設計;仿真實驗
中圖分類號:TH122?文獻標識碼:A?文章編號:1006-8023(2021)06-0151-08
Abstract:In order to reduce the labor intensity of staff, a variable volume portable logistics turnover box that can walk on stairs was designed for the terminal logistics distribution. Aiming at the application requirements of logistics turnover box, the box structure and main mechanism were designed, including variable volume and folding mechanism, planetary gear group walking mechanism, rod telescopic and rotating mechanism to realize the main function of the device. The CREO software was used to establish the model, and ANSYS software was used to carry out the structural finite element analysis of the box, and ADAMS software was used to carry out the stair walking motion simulation. A logistics turnover box with specific functions was designed. The results of simulation analysis showed that the strength and stiffness of the box could meet the load requirements. As the key stress components, the strength and stiffness of the limit screw in the variable volume mechanism can meet the use requirements and can withstand radial impact force. The optimal structure size of planetary gear set was determined by multiple motion simulation, and the motion stability requirements were met. The design of logistics turnover box can achieve a variety of functions, which is suitable for the terminal logistics distribution and the urban common distribution mode, as well as a variety of use scenarios such as retail and family.
Keywords:Logistics turnover box; variable volume; walking on stairs; structural design; simulation experiment
0?引言
隨著電商行業的迅速發展,快遞量增長迅速,社會各界對物流服務的需求也日益增長。物流末端配送環節,是物流過程關鍵環節之一,故提升末端物流配送效率對于物流業的發展十分關鍵[1]。發展應用智能快遞柜、智能配送機器人等是末端物流自動化轉型的有效方案,但受到成本、技術和經濟模式等多方面因素限制,智能化模式的推廣仍需一定時間,且末端物流配送不能完全依靠自動化設備和顧客自提的方式,高價值產品及蔬果配送,即時物流、冷鏈物流行業等仍然需要門到門的人力配送。目前,在物流相關設備應用方面,未充分考慮末端配送人員作業需求,在很多未建設智能快遞柜或代收點的寫字樓、社區及校園,配送人員仍需攜大量物品步行配送,尤其進行爬樓梯配送作業時,配送效率、服務質量、作業人員體力均受到一定程度的挑戰。
基于上述需求,考慮設計新型的物流周轉箱應用于末端配送環節。本文設計應用于門到門物流配送、零售行業或家庭使用等場景的具有樓梯行走功能的、容積可變式便攜物流周轉箱,可以提高末端物流配送工作效率,減輕工作人員勞動強度。同時,周轉箱尺寸的標準化設計,適用于新零售環境下城市配送對物流周轉箱循環流通等方面的需求,可促進城市配送模式的發展進步[2]。
目前周轉箱的樓梯行走功能情況:通過調查研究了解到,現有對于爬樓機器人的設計與研究[3],其裝置大多結構復雜,成本高,同時應用場景受限[4-6];有針對樓梯行走功能實現的爬樓機結構設計,主要有輪式、履帶式和步行式的基本結構[7],能夠滿足大型倉庫等應用需求,但其自重大,所占空間大,無法實現便攜功能,不能合理應用于末端物流配送環節[8];同時,調查發現市面上現有的輔助爬樓車存在安全性不好和運動穩定性差等問題。
目前物流周轉箱箱體的設計情況:現有周轉箱多為簡單的儲存箱,功能單一,無法滿足多樣化的應用需求,行業針對性不強;部分周轉箱為敞開式結構,承重能力差,不適合堆疊使用;且市場中的物流周轉箱仍存在耐腐蝕性、承重性和環保性等方面差的缺點。應用于末端物流環節的周轉箱多為傳統的一次性瓦楞周轉箱,功能性存在不足,不能較好地滿足可持續利用需求,亟需對其改進。
1?整體結構和工作原理
1.1?整體結構設計
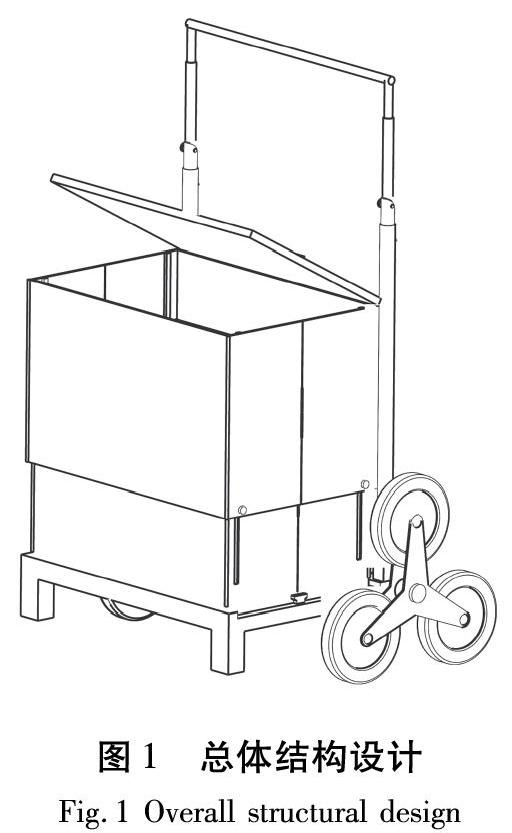
設計一種多功能式物流周轉箱,主要由箱體、輪組、拉桿和主體支架組成。箱體與裝置其他部分可分離,整體便于攜帶與存儲,且箱體的設計能夠滿足流通與周轉等方面需求,具有較高的強度及承載能力。裝置其他主要功能性機構包括行星輪組機構、箱體變容與折疊機構、拉桿伸縮與旋轉機構。總體結構如圖1所示。
1.2?工作原理
該物流周轉箱可實現多種功能,主要包括箱體變容與折疊、樓梯行走、拉桿伸縮與旋轉等,基于各項功能實現的機構設計方案如下。
(1)分離式箱體設計。箱體底部的定位滑槽與支架的滑軌配合,實現對箱體的連接固定,方便箱體的拆裝;箱體通過側板鉸鏈連接的方式,實現折疊功能;同時,考慮到循環流通過程中對標準化的要求,對箱體進行標準化改造,符合一定的尺寸標準,可持續循環利用,滿足物流周轉箱的多方面需求。
(2)箱體變容機構設計。主要利用導軌機構及限位螺釘等實現特定功能,使箱體實現靈活變容,且操作穩定便捷,在實際應用中便于裝置的攜帶及存儲,增強了裝置的實用性和應用場景的多樣性。
(3)行走機構設計。考慮運動的穩定性、裝置重量、體積、安全性及成本等多方面因素,在設計中采用行星輪組機構,實現省力樓梯行走功能。該機構既可實現平地行走,又可實現省力樓梯行走,同時,在平地非平整路面行走時具有越障功能,使用者可較為輕松地拉動裝置使其運動,滿足不同場景需求。一對輪組設置于裝置底部側后方,避免造成運動的不穩定。
(4)拉桿伸縮與旋轉機構。設計可旋轉調節角度的伸縮式拉桿,伸縮式設計可靈活調節拉桿高度且便于收納攜帶,旋轉機構使拉桿可調節一定角度,更適用于樓梯行走、坡路行走等特殊場景,使裝置的應用更加方便省力。
2?裝置主要機構設計
2.1?箱體結構及變容與折疊機構
箱體作為裝置的主體部分之一,與支架可分離,箱體的底部與支架采用定位滑槽與滑軌連接,支架的底部框架上設有定位滑軌,箱體底部開設與之相配合的滑槽,使二者可實現較方便的分離拆卸,同時支架的底部框架上設置止擋臺階,輔助導軌對箱體進行定位并承擔力的作用。箱體整體采用分體式結構,主要組成部分包括上箱體、下箱體、箱蓋與底座,其結構如圖2所示。箱蓋頂部設有與箱體底部尺寸相配合的止擋臺階,在箱體與支架分離時,便于對箱體進行堆疊放置,可增強其穩定性。
考慮到在末端配送、城市共同配送等環節,以及在倉庫等場所的流通周轉過程中對標準化的要求,對物流周轉箱的箱體尺寸進行標準化設計。根據物流標準化的要求及我國在貿易流通單元化、標準化方面的政策,提倡在末端物流環節使用600 mm×400 mm模數系列的物流周轉箱[1];在該裝置的設計中,所采用的標準模數尺寸為600 mm×400 mm×340 mm,即變容箱體非折疊狀態下的最小外部尺寸大小。
箱體的變容功能主要通過導軌機構實現,如圖3所示。由圖3可知,上箱體高度略小于下箱體,上下箱體通過調節導軌機構連接,導軌槽設置于下箱體的側面四邊處,導軌槽表面設有限位凹槽,上箱體對應位置設置可沿導軌槽上下移動的滑動式導桿,上箱體底部導桿與導軌槽連接處設置限位用擰緊螺釘,通過導軌槽上的限位凹槽與擰緊螺釘的配合實現自鎖。通過該機構的設計,實現箱體的多級變容,操作便捷;且限位螺釘調松后,上下箱體可分離,即封閉式箱體可轉化為敞開式結構,即可利用該裝置運送形狀不規則物品;同時,箱體側邊的導軌機構除實現變容調節功能,還作為支撐性部件,增強了箱體的強度,保證了箱體整體的穩定性。
上下箱體的各側板連接處,箱蓋、底座與箱體的一側連接處及圖示中兩側板的中間位置均為可旋轉折疊的鉸鏈式機構,該機構的設計使上下箱體分離后均可折疊,便于儲存及攜帶,節省空間。箱體折疊后的效果圖如圖4所示。
此外,考慮到對箱體的環保、強度等各方面的要求,需確定物流周轉箱的材料[10]。箱體材料需環保且無毒無味,耐腐蝕性、耐沖擊性、耐高溫低溫性及承重性好,強度高,同時自重相對較輕,且需控制成本,故該裝置的箱體選用高密度聚乙烯(HDPE)作為主體材料。HDPE韌性、耐磨性等較好,耐酸堿,表面硬度、拉伸強度較高,適用于該裝置箱體,且成本相對較低[10]。
2.2?行星輪組行走機構
采用三星輪組機構實現省力樓梯行走功能,其結構如圖5所示。一對行星輪組中主要零部件包括中心軸、三角支架、輪子和軸承等,將小輪中心軸間隔120°設置于三角支架上,整體結構相對簡單。
支架結構等金屬部件所用主體材料為鋁鎂合金,該材料比強度高,重量輕,抗壓承載能力強,使用壽命長[11];輪胎所用主體材料為通用合成橡膠,主要成分為丁苯橡膠,具有較好的彈性及耐磨性能,耐龜裂、抗濕滑,作為輪胎材料使用時靜音效果及緩沖性能好[12]。
平地行走時,以任意兩輪作為運動輪,發生轉動,三角支架及另一輪相對裝置整體靜止,可實現平穩行走;樓梯行走時,使用者施加較小作用力,使行星輪組發生翻轉,即可實現爬樓梯的運動[13]。
行星輪組的具體結構尺寸設計,影響其運動的穩定性、省力效果及裝置整體性能,故結合樓梯參數與實際應用場景,對機構進行運動參數分析,并初步確定其結構尺寸。其運動示意圖如圖6所示。
我國對于住宅建筑的設計規范規定,樓梯踏步寬度不應小于260 mm,踏步高度不應大于175 mm。結合實際的測量考察,在進行結構設計時設定樓梯踏步高度a為160 mm,踏步寬度b為260 mm;輪系半徑為R,輪子半徑為r;BC段定義為l1,AB段定義為l2。
根據運動特點及結構約束,根據設計參數,可列出如下方程:
由公式(1)可得相應尺寸參數的約束條件:
由計算結果可初步確定滿足運動條件的行星輪組結構尺寸設定范圍。
2.3?拉桿伸縮與旋轉機構
拉桿主要由內管、外管、握把、伸縮限位機構和旋轉機構組成,其主要功能性結構如圖7所示。內管2可在內管1中于豎直方向伸縮調節,內管1可伸縮置入外管,外管及內管1側面設置有若干定位槽,對應內管1及內管2側面設置限位扣,對伸縮拉桿進行定位,可調節拉桿高度。
位于內管1下部分的旋轉機構可實現對拉桿角度的調節,該管段為分體式結構,由上下2部分組成,上部管段與下部管段通過螺紋桿連接,螺紋桿兩側上部管段與下部管段之間設置彈性摩擦片,通過對螺母旋鈕的調緊與放松,可實現對拉桿角度的固定及調節。整體結構相對簡單可靠,操作方便。
拉桿所用主體材料選用鋁鎂合金,該金屬材料強度與韌性高,具有很強的抗壓承載力,不易變形,抗蝕性能好,方便耐用,可有效延長裝置使用壽命;同時其自重較輕,且為環保型材料,適用于該裝置[11]。
3?仿真實驗與分析
3.1?箱體載重有限元分析
箱體的載重與抗壓性能影響其使用穩定性,決定其使用效果與使用壽命等,故利用有限元分析軟件ANSYS對箱體進行結構分析,以驗證箱體的強度與剛度滿足性能要求。
有限元法(Finite element method,FEM)是根據變分法原理求解數學物理問題的一種有效的數值計算方法,其基本思想為將連續體分割為有限且按一定方式連接在一起的單元[14],對真實系統進行模擬。在箱體使用過程中,所受最大靜態載荷來自周轉箱載物重量,故對箱體載物時在運動狀態下的受力狀態進行仿真實驗研究,以反映箱體的載重性能[15]。采用有限元分析的方法進行靜態分析,檢驗箱體結構設計的合理性。
在CREO 3.0中創建簡化的箱體模型,將模型導入ANSYS軟件;根據其幾何結構及問題要求定義單元類型為十節點四面體實體結構單元Solid Brick 10node187。箱體主體材料為HDPE,查閱資料可知其強度極限約為15 MPa,彈性模量約為0.95 GPa,泊松比約為0.3,密度約為0.90 g/cm3,據此定義模型的材料屬性,利用智能網格劃分工具對模型進行有限元網格劃分。結合實際情況與調查研究,設定物流周轉箱在運動過程的正常工作狀態下載物質量為60 kg,根據箱體承重時的實際受載情況,對模型施加約束與載荷,定義分析任務,進行分析。分析得到箱體模型的應力與位移云圖如圖8和圖9所示。
通過有限元仿真實驗與分析可知,箱體整體應力較小,應力集中不明顯,且最大等效應力為1.585 7 MPa,小于箱體材料的強度極限值;最大位移為0.751 7 mm,數值較小,故箱體的強度與剛度滿足設計要求,箱體整體在運動過程中可有效滿足載物要求。
3.2?關鍵受力部件力學性能仿真
在進行樓梯行走運動時,箱體結構會承受較大的沖擊力作用,變容機構中的限位螺釘作為關鍵受力部件,將承受較大的徑向沖擊力,故應用ANSYS軟件對其進行力學分析,以驗證其強度與剛度滿足使用要求。
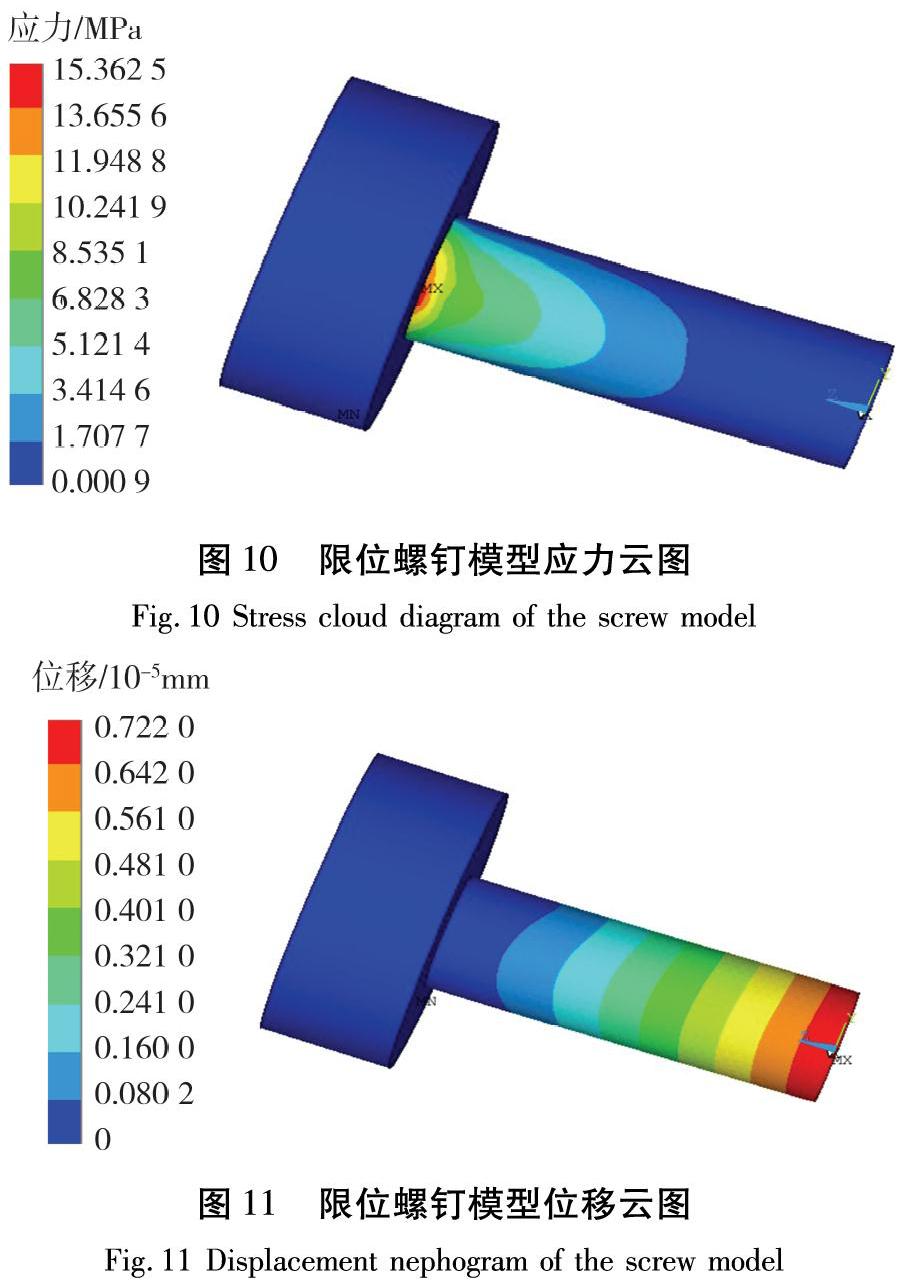
利用CREO 3.0創建簡化的限位螺釘模型,導入ANSYS軟件;定義單元類型為八節點六面體實體結構單元Solid Brick 8 node 185。該部件的主體材料為5052鋁合金,為鋁鎂系合金的一種,其抗拉強度為173~244 MPa,屈服強度約為70 MPa,彈性模量約為40 GPa,泊松比為0.25~0.3,密度為2.68 g/cm3。可定義模型材料的彈性模量與泊松比,并對模型進行有限元網格劃分。考慮箱體自重及貨物載重,并假設樓梯行走運動中的力作用于限位螺釘,定義分析任務,對該部件進行仿真分析。得到限位螺釘模型的應力與位移云圖如圖10和圖11 所示。
由上述分析結果可知,該構件受到較大沖擊力作用時,最大等效應力為15.38 MPa,小于鋁合金材料的屈服強度,滿足使用的強度要求;且結構變形的最大位移約為0.73×10-5 mm,總體形變較小,不影響構件使用,滿足使用的剛度要求。
3.3?輪組運動仿真與分析
行星輪組機構運動的平穩性是影響裝置整體運動性能的重要因素,因此需要分析行星輪組機構的運動學與動力學特性。
根據結構分析得到輪系半徑R與輪子半徑r的尺寸設定范圍,即80≤r≤130、130.64≤R≤176.25;以R與r作為關鍵設計變量,考慮到后期生產及裝配的便利性,以10 mm為1個級別,并排除邊界值,在R與r取值范圍內預先設置系列可變參數,采用不同參數值,模擬實際應用時受力情況與運動環境,進行一系列仿真分析。
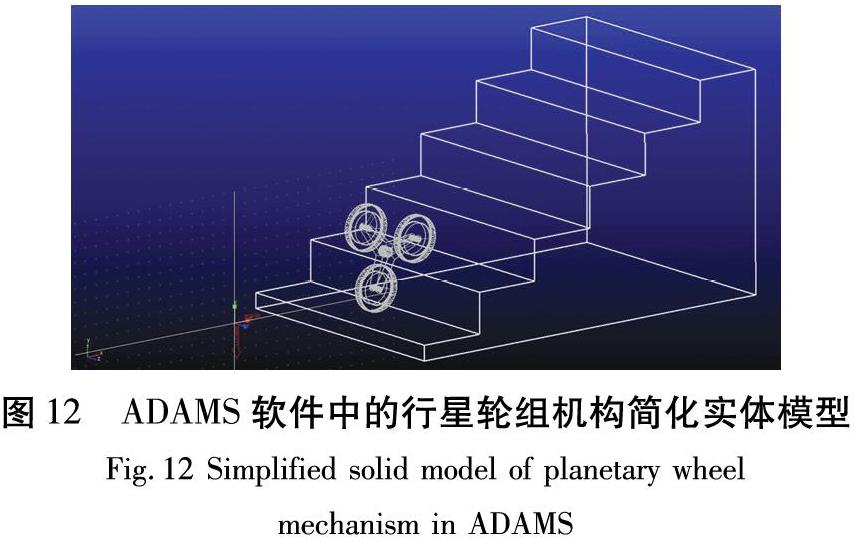
設定關鍵設計變量初始值為R=140 mm,r=80 mm,根據該結構尺寸,利用三維建模軟件CREO 3.0建立行星輪組機構,簡化實體模型,并為各零件設置相應約束,限制其自由度,完成裝配。利用ADAMS軟件對該模型進行樓梯行走運動仿真[16],將模型導入ADAMS軟件,如圖12所示。
模擬實際應用時受力情況與運動環境,設置測試變量,進行仿真分析,觀察輪組機構運動軌跡,整體運動狀況是否良好,確定機構是否能夠穩定完成樓梯行走運動,并得到后處理曲線圖[17-18]。調整可變參數,改變模型尺寸,并導入ADAMS軟件進行多次分析,根據設計變量不同參數的結合,共進行16次仿真分析。由各次仿真分析結果可知,當設計變量的參數值大小發生改變時,機構的運動性能發生改變,主要體現為運動軌跡的波動性不同,運動軌跡的波動性可通過三角支架中心點垂直方向位移曲線反映。根據多次仿真分析后處理結果,選擇垂直方向位移曲線波動性最小的參數設計作為最優化尺寸,即確定行星輪組的相對最優化結構尺寸為輪系半徑R=140 mm,輪子半徑r=90 mm。該參數下通過運動仿真得到三角支架中心點的位移及速度曲線,如圖13和圖14所示。
由仿真結果可見該結構尺寸的行星輪組機構在進行樓梯行走時位移波動較小,且速度連續,運動較穩定[19],能夠較好地滿足使用時的功能性要求。
4?結束語
本文設計的多功能式物流周轉箱,能夠實現箱體變容與折疊、穩定省力的樓梯行走、拉桿伸縮與旋轉的功能。針對各模塊機構,進行結構設計與計算,并確定所選用的主體材料。應用CREO軟件建模,并應用ANSYS與ADAMS軟件進行仿真分析,確定優化尺寸,且保證裝置滿足多種性能要求。物流周轉箱自重較輕,各機構可有效實現設定功能;箱體載重性能良好,尺寸的標準化設計,使其滿足流通周轉要求;關鍵受力部件可有效承受運動沖擊力,且滿足整體的運動穩定要求以及使用的便捷性要求。
該周轉箱應用場景廣泛,可用于末端物流配送、零售等多種行業以及日常生活,可有效降低使用者的勞動強度,提高便利性。同時,裝置結構由不同部件組成,便于制造與生產,具有較強的實際應用與推廣價值。
【參?考?文?獻】
[1]張錦,陳義友.物流“最后一公里”問題研究綜述[J].中國流通經濟,2015,29(4):23-32.
ZHANG J, CHEN Y Y. The review of research on the “last mile” in logistics[J]. China Business and Market, 2015, 29(4): 23-32.
[2]陳亞煒,龐燕,黃向宇,等.新零售環境下城市配送物流周轉箱共享模式研究[J].物流技術,2019,38(7):28-32.
CHEN Y W, PANG Y, HUANG X Y, et al. Research on sharing mode of logistics turnover boxes in urban distribution in new retail environment[J]. Logistics Technology, 2019, 38(7): 28-32.
[3]周梓達,紀浩欽,葉日鴻,等.一種爬樓梯機器人的創新設計[J].機械研究與應用,2019,32(6):75-78.
ZHOU Z D, JI H Q, YE R H, et al. The innovative design of a stair climbing robot[J]. Mechanical Research & Application, 2019, 32(6): 75-78.
[4]KIM B S, VU Q H, SONG J B, et al. Novel design of a small field robot with multi-active crawlers capable of autonomous stair climbing[J]. Journal of Mechanical Science and Technology, 2010, 24(1): 343-350.
[5]BHOLE A, TURLAPATI S H, S R V, et al. Design of a robust stair-climbing compliant modular robot to tackle overhang on stairs[J]. Robotica, 2019, 37(3): 428-444.
[6]LIU P Z, WANG J Z, WANG X, et al. Optimal design of a stair-climbing mobile robot with flip mechanism[J]. Advanced Robotics, 2018, 32(6): 325-336.
[7]朱同波,蔡凡.一種爬樓機結構設計與分析[J].安慶師范大學學報(自然科學版),2020,26(1):93-97.
ZHU T B, CAI F. Structural design and analysis of a building climbing machine[J]. Journal of Anqing Normal University (Natural Science Edition), 2020, 26(1): 93-97.
[8]顧艷紅,王晟楠,劉占民,等.輕載型電動載物爬樓機[J].機械傳動,2018,42(9):160-163.
GU Y H, WANG S N, LIU Z M, et al. Light-load stair climbing machine driven by electricity[J]. Journal of Mechanical Transmission, 2018, 42(9): 160-163.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
