基于ZYNQ的飛艇囊體應變在線監測系統設計
2021-12-22 13:18:18張曉榮王保成徐文寬秦慧嫻袁明昱
計算機測量與控制 2021年12期
張曉榮,王保成,郝 勇 ,徐文寬,秦慧嫻,2,袁明昱,2
(1. 中國科學院 空天信息創新研究院,北京 100094;2. 中國科學院大學 光電學院,北京 100049)
0 引言
平流層飛艇是一種輕于空氣的飛行器,主要由飛艇囊體、能源系統、推進系統、載荷艙構成。工作在臨近空間,主要依靠空氣浮力實現駐空及可控飛行[1]。在橋梁、飛行器、船舶等大型結構的健康監測中,應變是能夠反映材料或結構力學性能的重要參數,應變同樣是反應飛艇工作狀態的重要參數[2]。飛艇蒙皮的完整是飛艇系統正常工作的基本保證,蒙皮材料是飛艇的核心結構。因此對飛艇囊體應變進行檢測,其研究目的在于能在線監視囊體的應變情況。飛艇的主體結構是充氣的球體,飛艇主囊體采用柔性二維正交各向異性的性復合材料。在正常工作狀態下的飛艇,飛艇的蒙皮受到內外壓差的作用,會處于雙向拉伸的狀態,由于飛艇囊體厚度遠小于飛艇的長度,整體結構在受載情況下容易發生較大的變形甚至破壞,此時蒙皮的應變情況是蒙皮是否處于健康狀態的重要指示,同時也能夠為飛艇的安全運行提供可靠數據保障[3]。目前,在對類似飛艇囊體的柔性應變的監測技術種類較少,且測量精度和及時性不能同時滿足,所以針對這一待解決的問題提出了基于ZYNQ的應變在線監測系統設計方案以對工作狀態的飛艇囊體進行實時監測。
針對大型結構應變的測量,一般分為接觸式測量和非接觸式測量[4],其中最傳統的方法是使用電測法和光纖應變傳感器測量方法[5],但是前者耗電,測量精度低,而且對使用環境要求高,易受電磁干擾。后者雖然可靠性高但是受溫度敏感溫度-應變交叉敏感性影響,應變測量靈敏度低,且不能滿足實際工程應用環境中雙參量測量的需求[6-7]。基于以上測量方法,提出一種基于ZYNQ的應變測量方法,該方法靈敏度、分辨率高而且能夠實現實時在線測量[8]。應用范圍可以推廣至其他大型工程結構的健康檢測或者位移的測量中,具有良好的普適性。
1 系統結構及原理
根據飛艇囊體設計分析和試驗數據,囊體應變較大的區域是最大直徑處(個別特殊應力集中點暫不考慮),且其環形應變遠大于軸向應變。囊體超壓通常也是沿經線撕裂。因此,飛艇囊體應變監測應重點監測囊體最大直徑處的環形應變。浮空器中心研制了多個型號的飛艇,有長度從30~100 m的多個規格,且進行了多次應變測試試驗,根據所在中心的試驗報告可以得到,囊體最大直徑處的環形應變不會超過0.5%,考慮囊體設計安全系數,其破裂應變大約在1%左右。根據實驗結果及數據可知整體的應變測量裝置可以放置于經線方向。
根據薄壁圓筒理論,傳統飛艇設計分析中縱向應力和環向應力可采用近似公式:
(1)
(2)
其中:σa為縱向應力,σr為環向應力,p為艇囊內外壓差。r(x)為艇囊截面曲率半徑,t為艇囊壁厚。設置厚度0.1 cm,內壓為1 000 Pa。根據以上設置可得如圖1所示的飛艇受力云圖。根據飛艇受力應變云圖可以看出,蒙皮受到的應力呈環狀均勻變化,在飛艇軸向曲率最小的腹部,應力值達到極大值,在飛艇的鼻端應力分別達到極小值,這與實際結果也是相符合的[9]。所以在應變測量過程中需要集中考慮囊體腹部沿經線方向的應變情況。之后設計的應變測量裝置參考飛艇受力應變云圖沿經線方向在飛艇腹部多點粘貼。
圖1 飛艇受力應變云圖
系統總體結構原理如圖2所示,整個應變測量裝置由兩個粘貼片粘貼在飛艇囊體上,其中CCD線陣傳感器和光源初始分別固定在囊體表面上相距一定距離位置,并且通過機械約束結構使得光照方向時刻與線陣CCD感光面保持垂直關系。兩個粘貼片分別與光源和CCD傳感器固連。當囊體受到拉力產生應變時,兩個粘貼片的位置會隨著囊體受力而發生相對位移ΔL,此時的光源和CCD線陣傳感器的相對位置會發生變化,而其位置變化量也為ΔL。同時CCD線陣傳感器實時感知并記錄下光源相對CCD的移動,計算位移與兩個粘貼點的原始距離之間的比值即得到應變ε=ΔL/L。
圖2 應變測量裝置結構圖
雖然囊體表面為弧形,需要在設計方案過程中要考慮消除曲率帶來的影響,但是通常飛艇直徑較大,而應變傳感器尺寸較小,因此這種影響很小,在研究初期不納入考慮范圍[10]。同時由于CCD作為光電傳感器屬于積分型元器件,靈敏度高所以采用單獨光源,在機械結構設計、制作上需要保證整體結構密閉、避光、防塵、防射線,以保證CCD工作狀態良好,不受外界環境干擾。
2 系統硬件設計
飛艇囊體的應變在線監測系統主要以ZYNQ7020為主控芯片,整體包含光源系統、電源系統、AD采集模塊、驅動控制模塊、FIFO數據緩存、串口傳輸模塊、SD存儲卡模塊。應變測量裝置數據傳輸邏輯如圖3所示,首先整體系統復位初始化,之后由ZYNQ PL端產生TCD1500以及AD9238的驅動信號,在光電作用下,TCD1500將每個周期產生的5 340個包含光照信息的模擬電壓值的數據傳輸至AD9238中進行模數轉換,之后在模數轉換中將包含位移信息的光強信息數值化。AD9238將采集的信息傳輸至ZYNQ的PL端,PL端將接收的數據傳輸至FIFO進行緩存,通過ZYNQ中的AXI4數據傳輸協議將數據傳輸至PS端的DDR中進行后處理,由于CCD的數據信息大且采樣速率快,這勢必占據過多的資源,而且從飛艇飛行狀態監測來看,需要傳輸的狀態量很多,并不需要根據應變數據進行姿態控制或操作,所以將采用1次/s的速率將實時信息通過串口傳輸至地面計算機上。同時為了保證每次飛行數據的完整性,并且方便每次飛行后數據分析,需要保證數據真實、完整、詳細。所以將所有數據存入SD卡中。在經過多次飛行驗證后也可以根據數據分析獲得得到光照界限,將精確的光照信號二值化,轉化為0、1二值信號,使得傳輸更快捷、高效、直觀。
圖3 應變測量裝置數據傳輸邏輯圖
本系統設計主要功能為在飛艇工作過程中實現飛艇囊體應變的實時監測,所以需要對選用一維線性CCD器件對位移信息進行實時監測,選用的CCD芯片為TOSHIBA公司的TCD1500C,包含5 340個像元,每個像元尺寸為7 μm×7 μm×7 μm,光敏區域包含高靈敏度且低暗電壓信號的二極管,并且采用DIP22的雙列直插型的封裝形式。TCD1500C的小尺寸、低暗電流、高靈敏度的響應特點,能夠滿足飛艇囊體的應變在線監測的測量精度、速度和穩定性的需求。同時由于CCD具有靈敏度高,動態范圍大、像素劃分精度高等特點,所以光源選擇亮度和光源效率更高的發光二極管[11]。
ZYNQ是Xilinx公司推出的一款可擴展處理器平臺,性能高、功耗低,包含一個可編程邏輯(PL)和兩個Cortex-A9處理器(PS),通過AXI協議進行通信。在此設計中ZYNQ主要實現的功能為:1)TCD1500C以及AD提供驅動信號;2)采集數據并且存儲;3)對接收的信息進行數據處理;4)將處理后的信息傳回地面計算機上以實現實時的監控。本設計選用ZYNQ芯片基于以下原因:1)ZYNQ芯片的FPGA能夠為TCD1500和AD9238提供嚴格的時序驅動;2)ZYNQ的Cortex 處理器支持FATFS文件系統模塊,能夠大大縮短開發周期;3)在技術成熟后計劃升級為面陣CCD元器件進行多向的應變監測,在圖像處理中,ZYNQ的PL處理速度和能力配合PS的控制效果是單核MCU無法達到的;4)在后續開發中計劃將其他檢測模塊集成,例如溫度、壓差傳感器及作動機構,而且由于高空傳輸資源稀少,可以在板上實現數據處理,將處理結果簡化發往地面。使得該設計逐漸完善成為成熟的健康監測模塊。
2.1 TCD1500C驅動電路設計
線陣CCD的驅動信號由主控芯片ZYNQ產生,TCD1500C的供電電壓的典型值為12 V,典型工作電壓為5 V。但是ZYNQ的I/O常規口為3.3 V,與12 V的工作電壓不匹配,若直接使用ZYNQ I/O口驅動將無法工作。所以在本設計中采用反相器TC74HC04P,將TCD1500C的輸入信號進行取反并升壓,提高ZYNQ輸出信號的驅動和負載能力,使得輸入電壓滿足TCD1500C工作電壓。[12]TCD1500驅動電路如圖4所示,根據對TC74HC04P的手冊分析可知,當其供電電壓大于4.5 V時,反相器的輸出電壓大于3.84 V,滿足CCD驅動電路要求[13]。
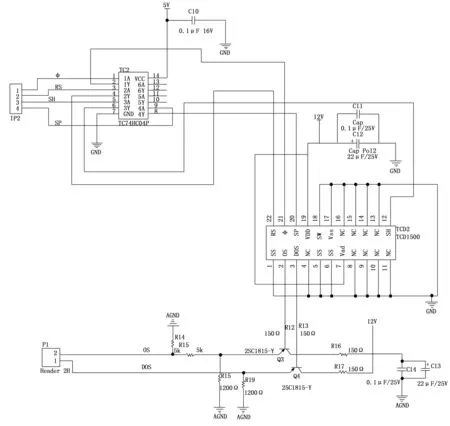
圖4 TCD1500驅動電路
2.2 AD9238 外圍電路設計
本設計選用AD9238進行模數轉換,將TCD1500的模擬電壓信號轉化為精確的數字信號,AD9238支持兩路AD輸入轉換,可以實現一套應變裝置同時測量兩個點的應變信息,極大的降低了測量成本。AD9238是ADI公司生產的12 bit模數轉換器,該AD芯片采用3.3 V供電,采樣速率為40 MSPS,測量精度為10 mV,工作方式為流水線式[14]。符合本結構的設計精度。
信息技術的廣泛應用影響著人們的思想觀念、行為習慣及日常生活,也給各行各業帶來巨大變化。在電工培訓中,這種影響和變化主要體現在以下幾個方面。
AD9238的驅動配置及供電電路如圖5所示,每個通道的信號值通過兩個SMA接口輸入,根據電阻配置將輸入的電壓配置為-6~+6 V的范圍。將AD配置成Offset Binary模式,根據電路設計可知當輸入為-6 V時,AD9238的轉換數值最小,當輸入為+6 V時,轉換的數字值最大。
2.3 電源電路設計
本設計中主要用到的電壓有4種分別是12 V,5 V,3.3 V,-5 V。其中TCD1500C信號采集部分采用12 V供電,之后將12 V轉化為5 V,采用LM2596S芯片轉換。LM2596S是一款電源管理單片集成電路的開關電壓調節器,線性和負載調節特性良好。±5 V采用MC34063A芯片進行轉換。該芯片是一種能夠用以升壓和降壓的用于直流-直流轉換控制的電源芯片,其中還包含有溫度補償帶隙基準源。
2.4 數據傳輸模塊設計
本設計選用串口協議將數據從ZYNQ中傳入上位機進行實時監測。RS422相比其他協議具有支持全雙工差分傳輸優勢,傳輸距離超長,且傳輸速率高,適合TCD1500C的視頻信息傳輸[15]。本結構主要使用MAX3490芯片作為電平轉換芯片。使用的開源FAT文件系統模塊來控制SD卡,FATFS的編寫遵循 ANSI C,因此不依賴于硬件平臺,FATFS為小型的嵌入式系統而設計,系統支持長文件名稱,支持兩級文件夾。FATFS系統主要包含3層,分別是:接口層、協議層、應用層。本設計通過調用FATFS來完成SD卡存儲及緩存[16]。
3 系統軟件設計
本次系統的軟件設計主要采用Verilog和C兩種語言,其中Verilog主要用于ZYNQ的PL端編程,主要包含TCD1500C的驅動時序設計、AD9238的驅動和信號采集,FIFO數據緩存模塊[17]以及RS422 串行數據驅動模塊。C語言主要用于外部存儲單元讀取、存儲DDR數據以及上位機編寫及控制。
3.1 CCD驅動脈沖時序設計
根據CCD的工作原理可知[18],TCD1500C的正常工作需要四路驅動信號分別是:RS(復位脈沖)、SH(光積分脈沖)、SP(采樣保持脈沖)、e1(驅動時鐘脈沖)。TCD1500C正常采集光信號的必備條件有:要有嚴苛的時序要求、滿足工作電壓、CCD信號輸出與AD采集同步。在e1信號的驅動脈沖信號作用下,實現光信號轉化為的電荷的產生、儲存以及轉移,最后將所有電荷信號依次驅動導出至OS端口[19]。
上述工作都是由驅動電路來完成,根據時序分析可知,e1的時序為0.5 MHz,占空比為1∶1,SP的頻率典型值為1 MHz。采樣保持脈沖SP的相位比RS慢1 μs,輸出復位脈沖RS為1 MHz,占空比為1:3[20]。ZYNQ在硬件語言Verilog的描述中提供SH、e1、RS、SP的四路時序信號。通過vivado的仿真功能可以得到如圖6所示的TCD1500驅動時序圖,可知完全符合datasheet的時序邏輯要求,且經硬件電路驗證,以下信號時序符合TCD1500正常工作時序。
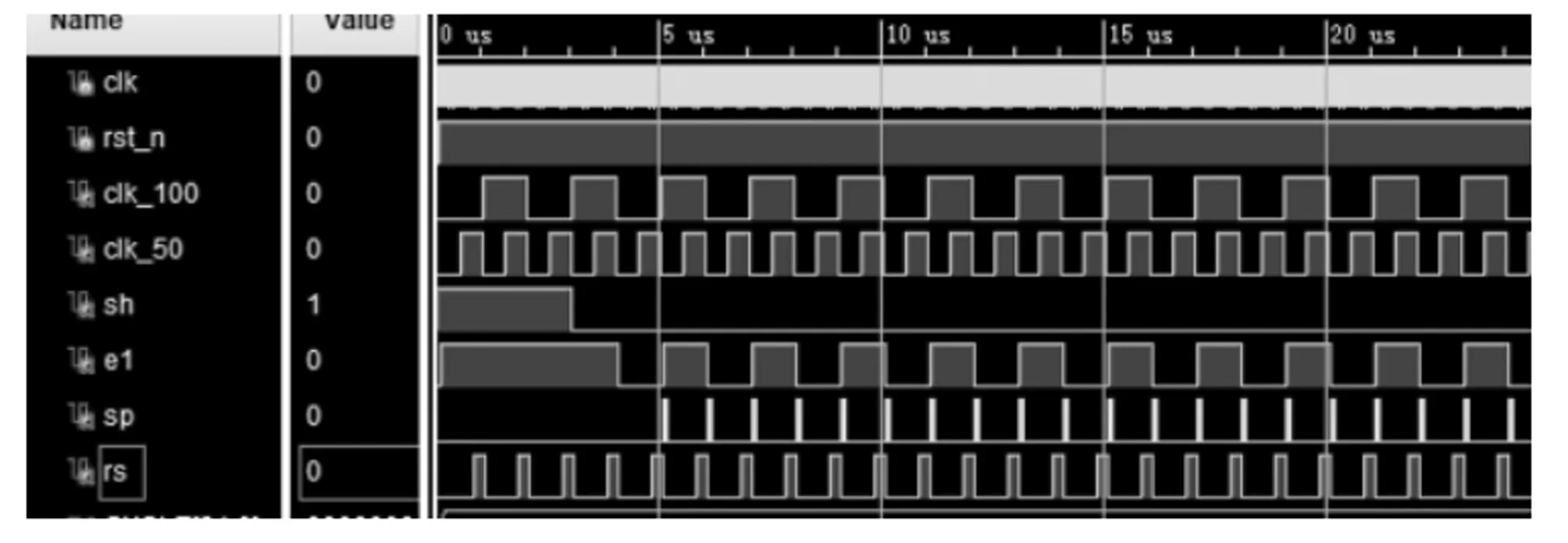
圖6 TCD 1500驅動時序圖
3.2 A/D采集時序設計
AD9238支持雙通道的信號采集,輸出為3.3 V的CMOS的輸出模式,兩路信號相互獨立,使用相互獨立的時鐘和數據通道。在時鐘信號的上升沿,FPGA采集信號[21]。AD9238驅動時序如圖7所示。
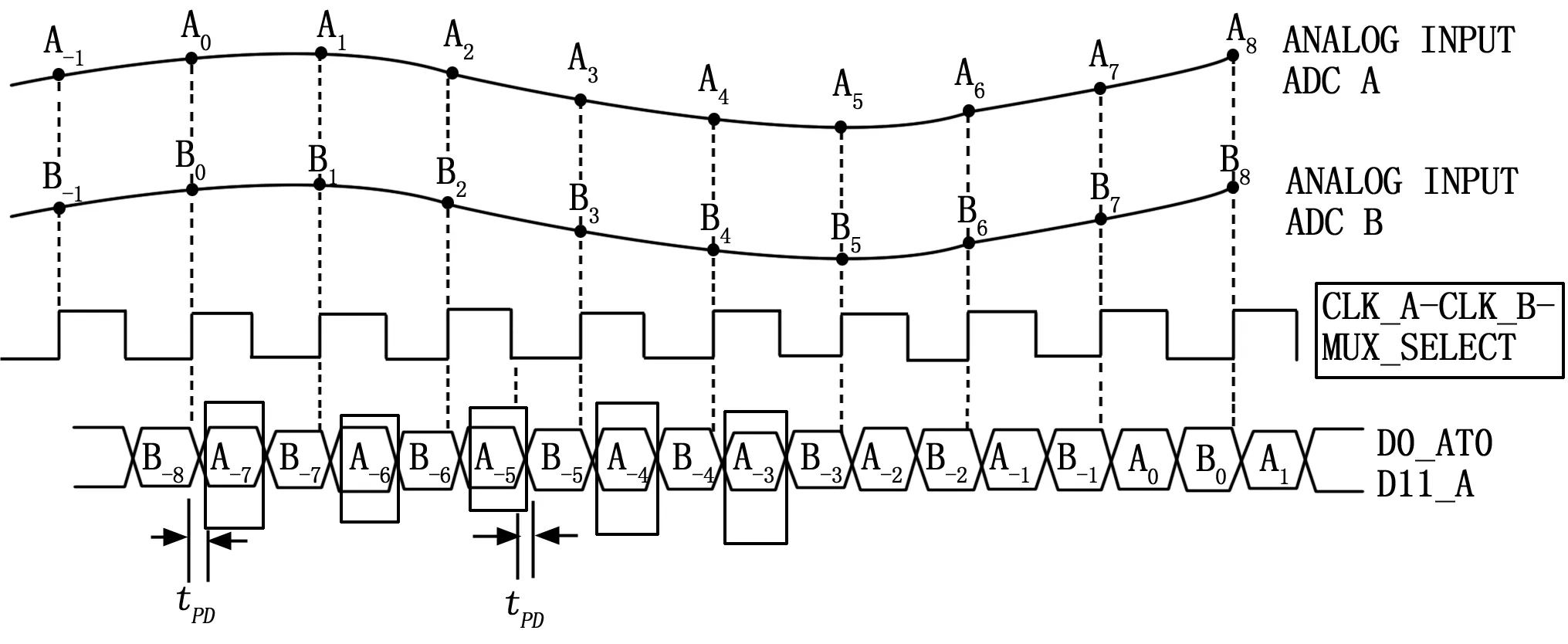
圖7 AD9238驅動時序
3.3 數據讀寫模塊設計
AXI總線協議是ARM公司開發的一套SOC總線標準,用于SOC設計時各個模塊之間的互聯操作。AXI4協議是基于猝發機制的高帶寬、高性能、低延時的總線。該協議主要包含有寫地址、寫數據、寫響應、讀數據、讀響應5個部分組成。主機和從機之間通過互相發送VAILD和READY信號來完成握手。同時AXI的寫響應通道實現從設備向主設備發出寫交易的完成信號。由于TCD1500C信號傳輸頻率高且信息量大,無法將數據從PL端傳入PS端,所以使用AXI HP總線實現對內存DDR的讀寫訪問[23]。系統總體控制信號設計流程如圖8所示。
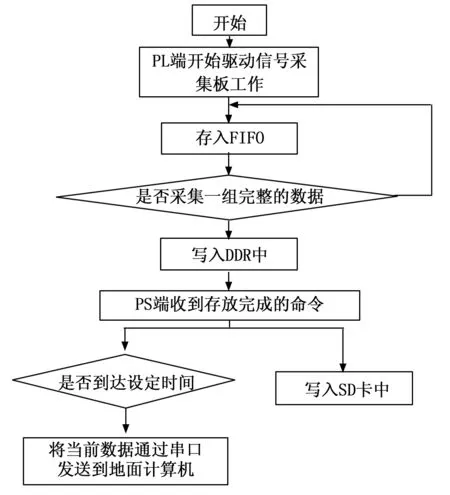
圖8 系統總體控制信號設計流程圖
在vivado中建立bd文件如圖9所示,根據系統bd框圖可知:系統中有一個AXI_Interconnect作為PL和PS接口。新建包含AXI-Lite和AXI-Full協議的IP核實現數據在ARM和FPGA中互傳。使用該IP核可以傳輸大量數據,AXI_HP可以訪問PS端DDR內存,此外通過AXI-Lite傳輸PS端對PL端的控制信息、突發長度等參數,通過AXI-Full將大量數據存儲至DDR中。AXI_GP端口主要用作ARM處理器訪問寄存器的通道。同時該IP核可以完成對外部硬件電路控制及驅動。
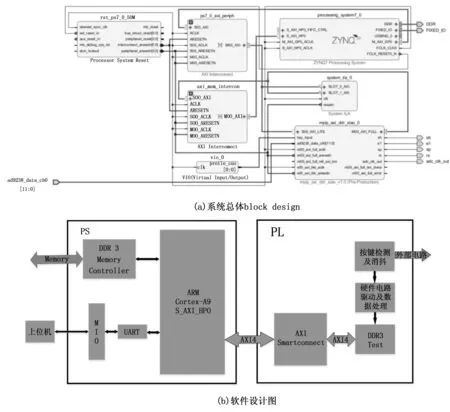
圖9 ZYNQ總體及使用資源圖
4 實驗結果與分析
經過前期對電路的設計及測試,搭建實物連接如圖9所示,主要包括ZYNQ開發套件、TCD1500數據采集板、AD模數轉換模塊。整體使用外部12 V供電,經調試可以完成上位機的收發及SD卡緩存。達到設計指標。數據信息可以通過AXI的WRITE DATA通道顯示數據的近似模擬量來顯示在CCD的數據采集實時信號,將數據處理為一維線性如圖10所示。
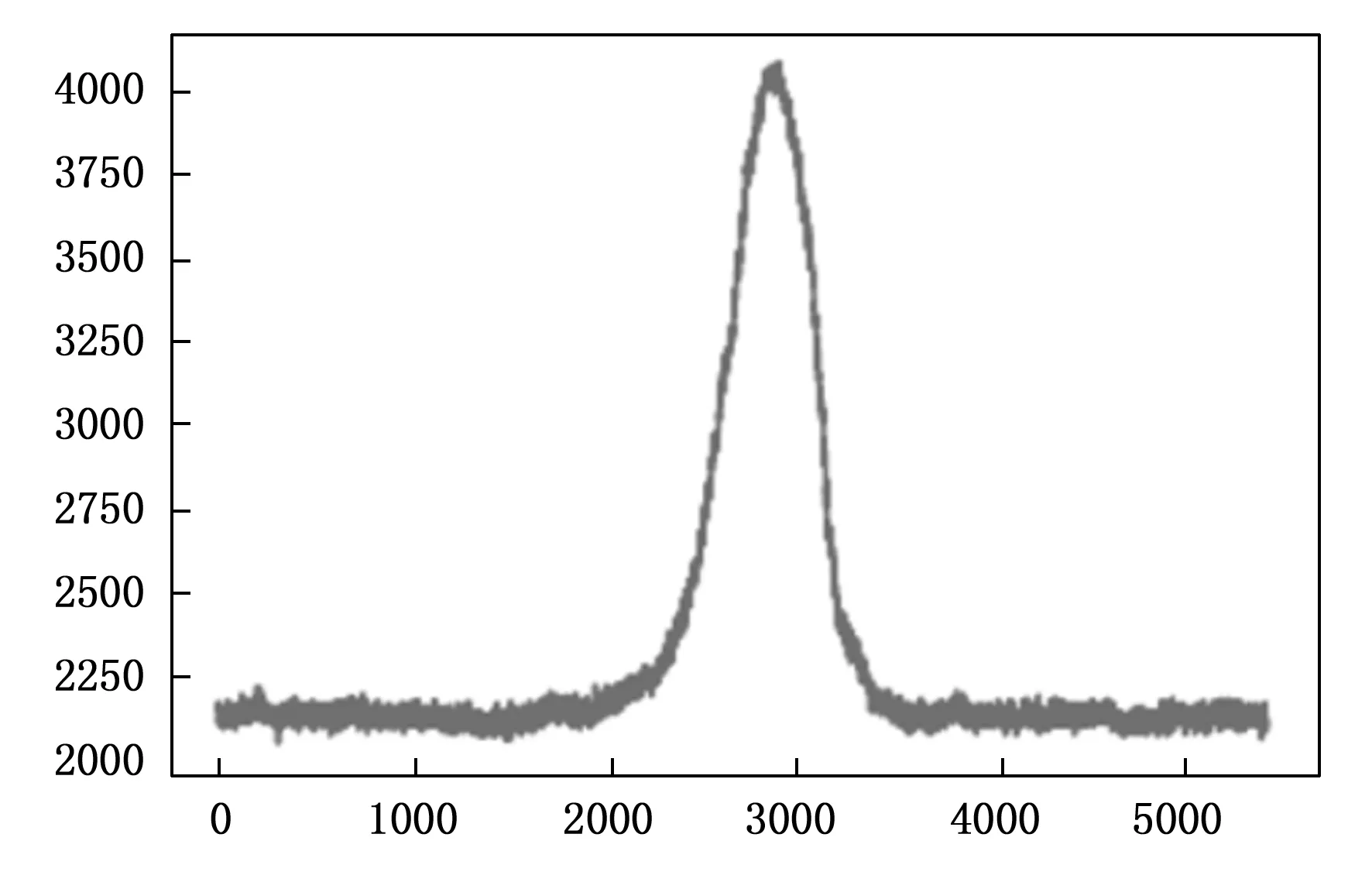
圖10 采集數據示意圖
通過在vivado的bd設計中添加system-ila可以看到通過AXI協議將實時數據寫入DDR4中,實現數據在PL與PS間的互傳及TCD1500數據的實時傳輸及監測。
TCD1500C的像元間距為7 μm,即尺寸分辨率為7 μm。像元數量為5 000左右,則總有效敏感總長度為35 mm。因此,根據囊體最大應變1%的需求,兩個粘貼點之間的最大間距為35 mm/1%=3 500 mm。根據項目總體目標應變測量精度0.1%的要求,則兩個粘貼點之間的最小間距為7 μm/0.1%=7 mm。因此兩個粘貼點之間的間距區間為7~3 500 mm。
5 結束語
根據ZYNQ采集TCD1500的前端數據源,將應變測量問題轉化為位移的數據采集,針對高空飛艇的特殊應用環境,設計了一種用于高空飛艇囊體的應變在線監測系統。該系統采用ARM+FPGA 的SOC技術,通過使用AXI4總線協議使得大量數據從PL端傳入PS端從而實現數據傳輸至外部存儲設備以及在上位機上的顯示,系統具備體積小、功耗低、精度高、實時性、穩定性強的特點。滿足囊體應變在線監測要求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21