重力梯度力矩作用下近地衛(wèi)星自旋運動規(guī)律分析
2021-12-21 09:18:34蔡立鋒張國云洪濤李衛(wèi)平林海晨孫振江
中國空間科學(xué)技術(shù) 2021年6期
蔡立鋒,張國云,洪濤,李衛(wèi)平,林海晨,孫振江
中國西安衛(wèi)星測控中心 宇航動力學(xué)國家重點實驗室,西安 710043
1 引言
近地衛(wèi)星一般處于主動姿態(tài)控制下三軸穩(wěn)定運動狀態(tài),衛(wèi)星在軌常發(fā)生姿態(tài)失控故障,此時常處于無主動控制情況下的自旋狀態(tài),對于其自旋姿態(tài)的確定和預(yù)測是姿態(tài)故障恢復(fù)的前提[1-4]。當(dāng)衛(wèi)星到達(dá)壽命末期,由于部件故障等原因需要對衛(wèi)星進(jìn)行離軌或鈍化,使得衛(wèi)星處于姿態(tài)無控狀態(tài),可以設(shè)計近地衛(wèi)星姿態(tài)自旋策略,使衛(wèi)星仍然保持能源供應(yīng)和測控。比如對某近地衛(wèi)星離軌處置后的姿態(tài)自旋策略,提出了一種長期在軌穩(wěn)定自旋的姿態(tài)控制模式[5]。因此,很有必要對近地衛(wèi)星自旋運動規(guī)律作進(jìn)一步研究。
近地衛(wèi)星受地球扁率J2項攝動,軌道面一般處于進(jìn)動狀態(tài)。典型的太陽同步軌道衛(wèi)星,軌道面隨太陽進(jìn)動,同時受到重力梯度、太陽光壓、地磁、氣動等復(fù)雜攝動力矩作用,使得星體角動量在慣性空間指向發(fā)生變化。一般來說,對于低軌衛(wèi)星,重力梯度和地磁力矩起主要作用[6]。地磁力矩來源于星上電子儀器產(chǎn)生的剩余磁場,或者來自姿態(tài)控制用的磁矩線圈,均與衛(wèi)星星上狀態(tài)有關(guān)。本文主要考慮重力梯度力矩作用下衛(wèi)星運動規(guī)律。
受地球重力梯度力矩作用下的自旋衛(wèi)星的運動規(guī)律,從自旋衛(wèi)星的平衡狀態(tài)角度,有著名的湯姆孫(Thomson)平衡和萊金斯-普林格爾(Likins-Pringle)平衡[7-9]。其中湯姆孫平衡自旋軸指向軌道面法線;萊金斯-普林格爾平衡要求自旋軸進(jìn)動角速率等于軌道角速度,自旋角速率一般小于軌道角速度。這幾種自旋平衡條件是在假設(shè)衛(wèi)星為軸對稱剛體,并且衛(wèi)星軌道為圓形且軌道面不存在進(jìn)動,實際上除了傾角為90°以外的低軌衛(wèi)星軌道面均存在進(jìn)動。文獻(xiàn)[10]分析了重力梯度作用下軸對稱飛行器自旋運動,給出了進(jìn)動角速率近似解。當(dāng)衛(wèi)星自旋角速率較大時,文獻(xiàn)[11-12]指出對于受微弱力矩作用的高速旋轉(zhuǎn)剛體,應(yīng)用Serert-Andoyer正則變量可使分析過程明顯簡化。文獻(xiàn)[13-16]運用基于Serert-Andoyer正則變量分析了自旋運動及重力梯度作用下的近似解。文獻(xiàn)[17]利用數(shù)值仿真的方法研究了重力梯度力矩引起的自旋穩(wěn)定衛(wèi)星姿態(tài)攝動,發(fā)現(xiàn)一些運動規(guī)律,但仍沒有考慮存在軌道攝動的情況。本文建立非軸對稱近地衛(wèi)星在受地球非球形等攝動軌道面緩慢進(jìn)動時,在重力梯度影響下的姿態(tài)運動模型,推導(dǎo)自旋角速率滿足一定條件下自旋運動的進(jìn)動角、章動角、自旋角的解析解,討論近地衛(wèi)星自旋姿態(tài)在重力梯度攝動下運動規(guī)律及其應(yīng)用價值。
2 姿態(tài)攝動常微分方程組
2.1 姿態(tài)運動方程
定義衛(wèi)星軌道坐標(biāo)系,z軸由衛(wèi)星質(zhì)心指向地心,x軸在軌道平面內(nèi)與z軸垂直,指向衛(wèi)星運動的方向,y軸與z、x軸成右手螺旋關(guān)系。定義交點軌道系為衛(wèi)星處于升交點時的軌道坐標(biāo)系。星體相對于交點軌道系的姿態(tài)采用歐拉角,為便于分析自旋軸進(jìn)動規(guī)律,定義姿態(tài)轉(zhuǎn)序為2-1-2,對應(yīng)的歐拉角為θ,φ,φ。星體相對于J2000慣性坐標(biāo)系的角速度在星體坐標(biāo)系b中的投影為ω=[ωx,ωy,ωz],可建立[θ,φ,φ,ωx,ωy,ωz]六變量的姿態(tài)運動常微分方程組。
姿態(tài)運動方程描述星體相對于交點軌道系的運動規(guī)律。歐拉角表示的坐標(biāo)轉(zhuǎn)換矩陣為[6]:
(1)
將式(1)代入并整理得:
(2)
其中,上標(biāo)bx、by、bz表示角速度投影到星體坐標(biāo)系中各軸分量。
2.2 姿態(tài)動力學(xué)方程及重力梯度表達(dá)式
投影到任意坐標(biāo)系l的姿態(tài)動力學(xué)方程[6]:
(3)
式中:I為星體轉(zhuǎn)動慣量;ω為星體角速度;M為外力矩,本文即為重力梯度力矩;下標(biāo)bi表示星體相對于慣性坐標(biāo)系,li表示任意坐標(biāo)系l相對于慣性系i;上標(biāo)l表示投影到坐標(biāo)系l。當(dāng)投影參考系為星體坐標(biāo)系b時,式(3)變?yōu)椋?/p>
(4)
(5)

展開可得:
(6)

(7)

(8)
式(8)中星體轉(zhuǎn)動慣量I慣量積為0。I與坐標(biāo)軸的選取密切相關(guān),總可以通過坐標(biāo)變換將衛(wèi)星慣量矩陣轉(zhuǎn)化為慣量積為0的對角矩陣,而且一般的星體坐標(biāo)系的設(shè)置均使得非對角元素慣量積相比對角元素轉(zhuǎn)動慣量很小。因此,不失一般性,以下僅討論在慣量矩陣為對角矩陣情況下的姿態(tài)運動方程。設(shè)地心到衛(wèi)星的矢徑在軌道坐標(biāo)系和星體坐標(biāo)系中分別表示為ro和rb,則ro=(0 0 -r)T,rb=R2(φ)R1(φ)R2(θ)R2(u)ro,u為衛(wèi)星軌道緯度幅角,即從升交點起沿衛(wèi)星運動方向到衛(wèi)星轉(zhuǎn)過的角度。將rb表達(dá)式代入(8)式可得:
(9)
3 自旋運動解析解
3.1 解析解的推導(dǎo)
定義萊查坐標(biāo)系[7-8]為先繞交點軌道系y軸轉(zhuǎn)動θ,再繞新的x軸轉(zhuǎn)動φ形成的坐標(biāo)系,θ為進(jìn)動角,φ為章動角;星體坐標(biāo)系b即為萊查坐標(biāo)系繞自身y軸旋轉(zhuǎn)一個自旋角φ形成。

用下標(biāo)l表示萊查坐標(biāo)系,式(3)即為投影到萊查坐標(biāo)系的姿態(tài)動力學(xué)方程,將式(3)寫為:
(10)

(11)
(12)

(13)
投影到萊查坐標(biāo)系的轉(zhuǎn)動慣量Il=R2·(-φ)IbR2(φ),由式(11)~(13)可得到H1的分量為:
(14)
(15)
(16)

萊查坐標(biāo)系下的重力梯度力矩Ml為:

(17)
由式(14)(15),略去4階以上小量,得到:
(18)
(19)
式(17)~(19)代入式(16),并略去2階以上小量可得:
俗話說,有好的思路,把它變成現(xiàn)實才是最重要的。“科學(xué)發(fā)展觀”的基本要求是全面協(xié)調(diào)可持續(xù),就是要推進(jìn)各個方面的發(fā)展,實現(xiàn)速度、質(zhì)量、效益統(tǒng)一,而不能顧此失彼。“科學(xué)發(fā)展觀”的根本方法是統(tǒng)籌兼顧,也就是要統(tǒng)籌解決生產(chǎn)建設(shè)中的各種關(guān)系和問題。而這一切都離不開高質(zhì)量、高效能的管理。為此,我們需要時刻保持拼搏進(jìn)取、勇創(chuàng)一流的精神狀態(tài),始終堅持以追求卓越為目標(biāo),持之以恒地抓好“制度建設(shè)、管理模式、管理效能”這三個關(guān)鍵環(huán)節(jié),全面提升管理標(biāo)準(zhǔn)和水平,探索形成高質(zhì)量、高效能的管理模式,為全面協(xié)調(diào)可持續(xù)發(fā)展奠定堅實的管理基礎(chǔ)。
(20)
令:

則式(20)中cos2(u+θ)可分解為下式:
cos2(u+θ)=

這里略去了小量周期項,代入式(20),得到進(jìn)動角、章動角平均值的解析式:
(21)
進(jìn)動角、章動角的周期項如下:
(22)
進(jìn)動角和章動角平均變化速率為:
(23)
3.2 自旋運動規(guī)律及解析解成立的條件

(24)


(25)

(26)

4 數(shù)值仿真分析及對解析解的驗證
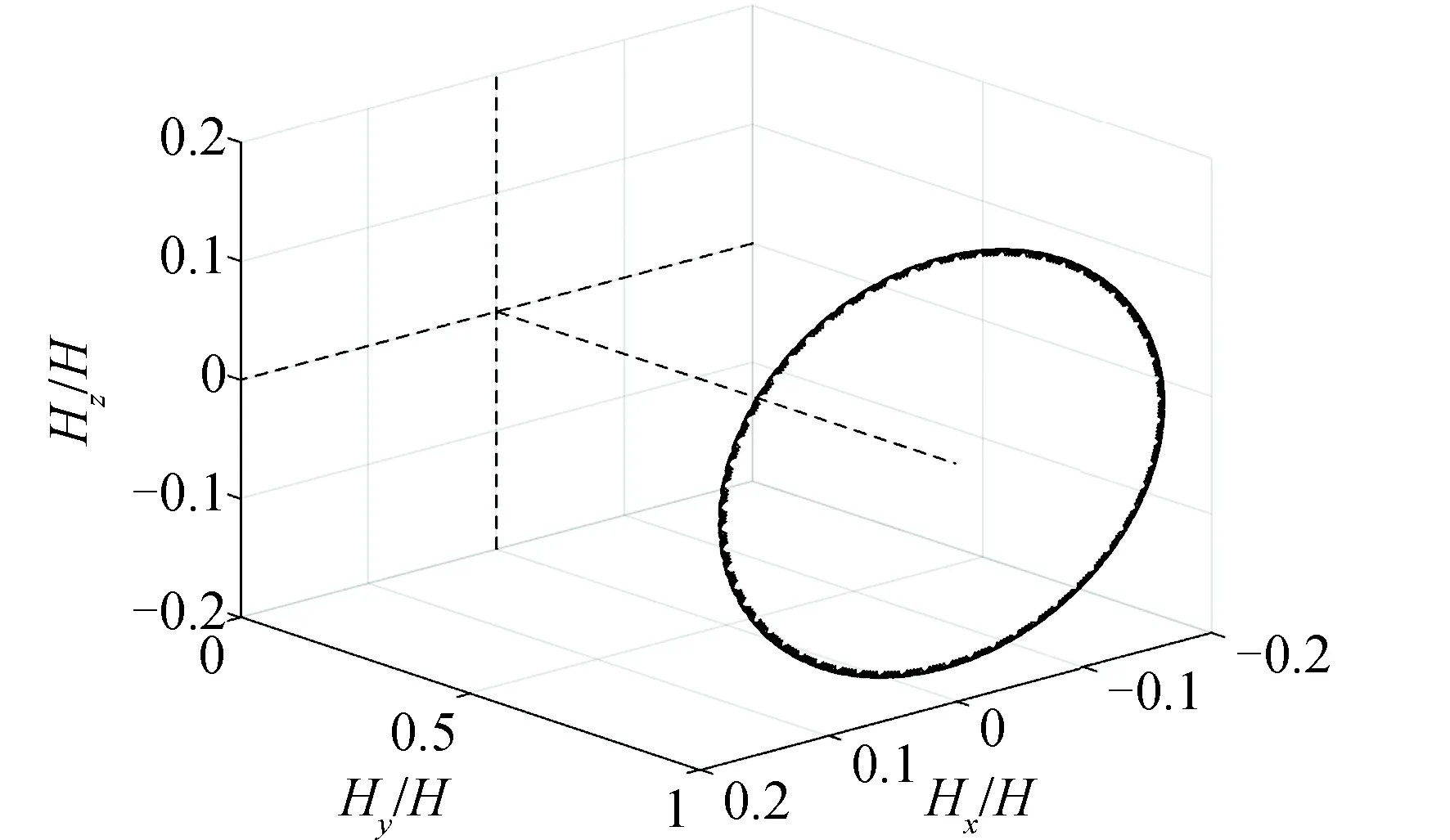
圖1 角動量空間運動Fig.1 Spatial motion of angular momentum
以方程(2)(4)建立常微分方程組,采用數(shù)值積分仿真分析。初值設(shè)計衛(wèi)星繞最大主慣量軸自旋,設(shè)為衛(wèi)星本體y軸,初始條件為:
(27)
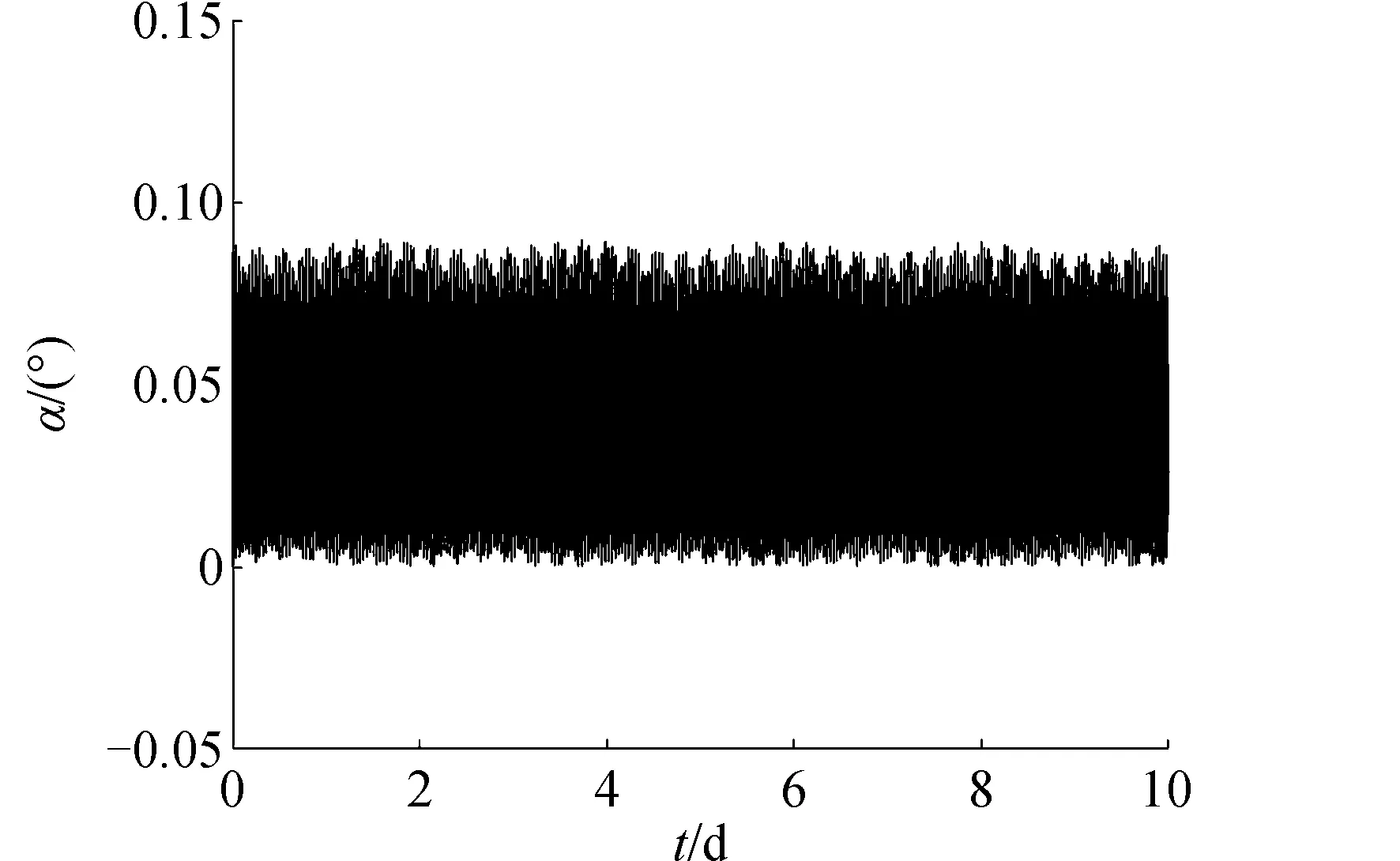
圖2 角動量方向與自旋軸夾角αFig.2 Angle α between angular momentum direction and spin axis
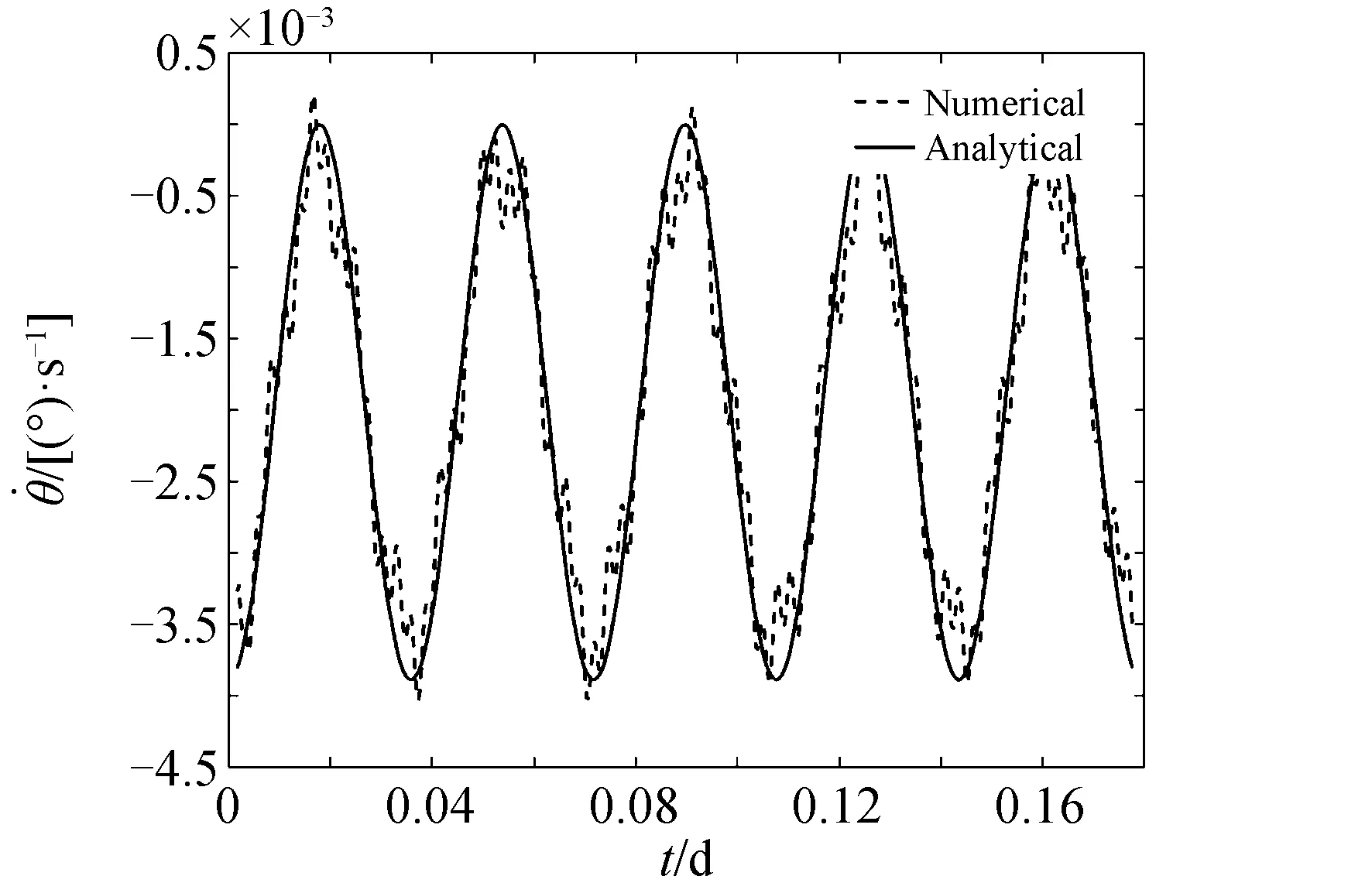
圖3 進(jìn)動角速度數(shù)值解與解析解Fig.3 Numerical and analytical solutions of precession angular velocity
圖3是進(jìn)動角速率變化曲線,虛線為進(jìn)動角速率按照自旋角φ求平均的結(jié)果,進(jìn)動角速率仍存在周期運動,周期近似為軌道運動周期的一半,實線為式(23)確定的常量加式(22)確定的周期項,可見數(shù)值曲線和解析解曲線符合得很好。圖4和圖5分別是進(jìn)動角和章動角變化曲線,實線表示解析解,為式(21)確定的平均值加上式(22)確定的周期項,初值取平均值即式(27)中的初值減去式(22)確定的周期項。圖4符號“*”連接的曲線為進(jìn)動角數(shù)值解,與解析曲線符合得很好,進(jìn)動角近似線性變化;圖5虛線部分為章動角數(shù)值解,解析解給出的平均值曲線在數(shù)值解包絡(luò)中間。章動角在衛(wèi)星運行10d軌道面進(jìn)動接近10°后,仍然保持在初值附近小幅波動,說明自旋進(jìn)動和章動運動跟隨軌道面一起進(jìn)動,圖1顯示的自旋軸空間運動也說明這一點。由圖3~5可見,解析公式(21)~(23)計算的進(jìn)動角、章動角及其變化曲率計算結(jié)果與數(shù)值計算結(jié)果非常接近, 這就說明了解析公式的正確性。
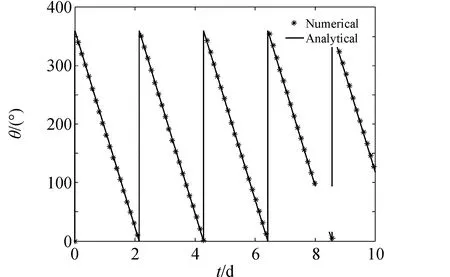
圖4 進(jìn)動角θ數(shù)值解與解析解Fig.4 Numerical and analytical solutions of precession angle θ gradient

圖5 章動角φ數(shù)值解與解析解Fig.5 Numerical and analytical solutions of nutation angle
5 結(jié)論
本文推導(dǎo)了重力梯度力矩作用下近地衛(wèi)星自旋運動的解析公式,分析其運動規(guī)律為:近地衛(wèi)星受地球非球形等主要攝動影響,衛(wèi)星軌道面緩慢進(jìn)動,當(dāng)衛(wèi)星繞最大主慣量軸旋轉(zhuǎn)且自旋角速度在一定取值范圍時,自旋軸以恒定的平均角速率進(jìn)動,進(jìn)動軸接近軌道法線,章動角在小范圍內(nèi)波動,波動周期與進(jìn)動周期相同;進(jìn)動角速率與衛(wèi)星軌道高度、自旋轉(zhuǎn)速、三軸轉(zhuǎn)動慣量及章動角有關(guān);衛(wèi)星的進(jìn)動、章動和自旋運動隨著軌道面的進(jìn)動一起進(jìn)動。
衛(wèi)星失控自旋后由于能量耗散作用,最終繞最大主慣量軸自旋,利用解析公式,可以在已知自旋軸進(jìn)動角速率和自旋轉(zhuǎn)速情況下(一般星上傳感器容易測得),計算自旋軸與軌道法線夾角的姿態(tài)信息,這就為衛(wèi)星失控自旋后的姿態(tài)確定提供了理論依據(jù)。當(dāng)衛(wèi)星發(fā)生姿態(tài)測量元件或者部分姿態(tài)控制部件故障后,可以建立適當(dāng)?shù)男l(wèi)星自旋姿態(tài),由于自旋軸方向隨軌道面一起進(jìn)動,且軌道面隨太陽同步進(jìn)動,因而能夠在衛(wèi)星姿態(tài)測量部件和控制部件關(guān)閉的情況下,保證太陽能翼板穩(wěn)定接收太陽能;同樣的設(shè)置可以應(yīng)用在衛(wèi)星在軌備份,當(dāng)設(shè)置適當(dāng)?shù)淖孕隣顟B(tài)后,可以關(guān)閉一切姿態(tài)測量部件和控制部件,衛(wèi)星仍能保持姿態(tài)穩(wěn)定、能源穩(wěn)定的測控穩(wěn)定,實現(xiàn)長壽命在軌保持,需要時可快速激活使用。
