基于無人機傾斜攝影技術(shù)在工程建設(shè)中的應用研究
2021-12-20 03:34:09于成紅楊果李存黃博任龍
家園·建筑與設(shè)計 2021年12期
于成紅 楊果 李存 黃博 任龍


摘要:近年來,基于無人機的傾斜攝影技術(shù)是國際測繪領(lǐng)域發(fā)展起來的一項新技術(shù),改變了正射影像從垂直角度的限制。通過一個垂直、四個傾斜、五個不同的視角同步采集影像,獲取到豐富的頂面及側(cè)視的高分辨率紋理。它不僅能夠真實地反映地物情況,高精度地獲取物方紋理信息,還可進行先進的定位、融合、建模等技術(shù),真實的生成三維模型。
關(guān)鍵詞:無人機傾斜攝影技術(shù);高效迅速地建立建筑模型;加強項目信息化;智慧建造
一、無人機傾斜攝影技術(shù)介紹
通過利用無人機傾斜攝影技術(shù)進行航拍建模,提取位置信息,建立各施工階段的實際模型,提取工程量;并且結(jié)合GIS技術(shù),可以精確提取坐標點位,反應項目各點位實際位置坐標,能廣泛應用于工程施工。應用此技術(shù)能高效迅速地建立建筑模型,進行工程點位定位,加強項目信息化管理水平、科技決策水平以及高效管控水平,從而達到降本增效、智慧建造、綠色施工的目的。適用于具備無人機拍攝條件、需要建立三維模型的項目施工。
二、應用實例介紹
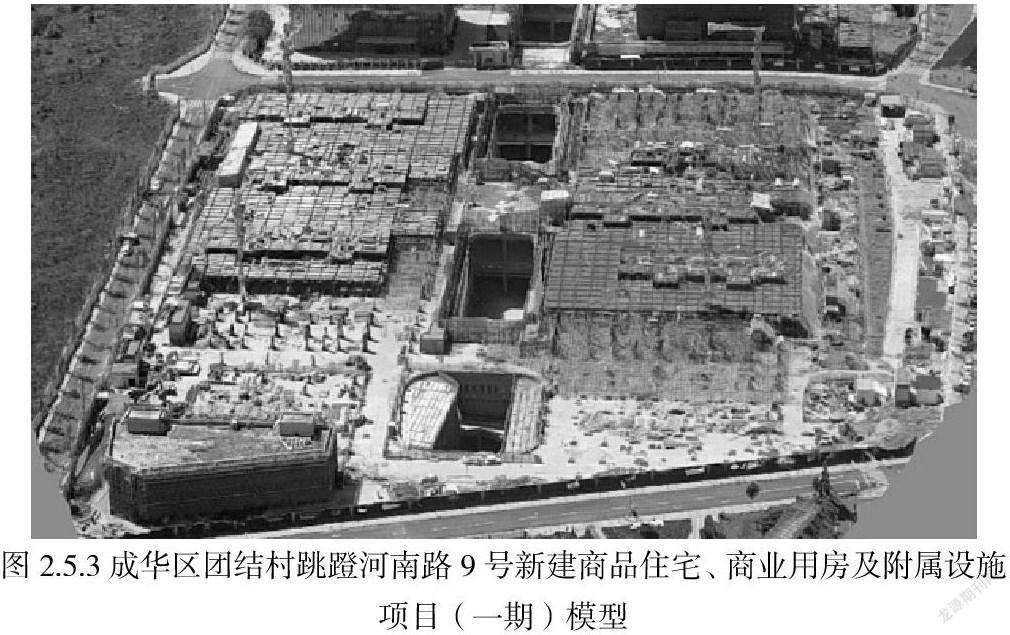
2.1成華區(qū)團結(jié)村跳蹬河南路9號新建商品住宅、商業(yè)用房及附屬設(shè)施項目(一期)概況
成華區(qū)團結(jié)村跳蹬河南路9號新建商品住宅、商業(yè)用房及附屬設(shè)施項目(一期)項目位于四川省成都市成華區(qū)團結(jié)村跳蹬河南路9號,總建筑面積8.6萬㎡,建筑物由11棟8~10層的鋼筋混凝土框架住宅樓、1棟2層商業(yè)、1棟單層垃圾房、1棟單層物管用房和單層商鋪和1層地面車庫組成,結(jié)構(gòu)形式為鋼筋混凝土框架結(jié)構(gòu)。
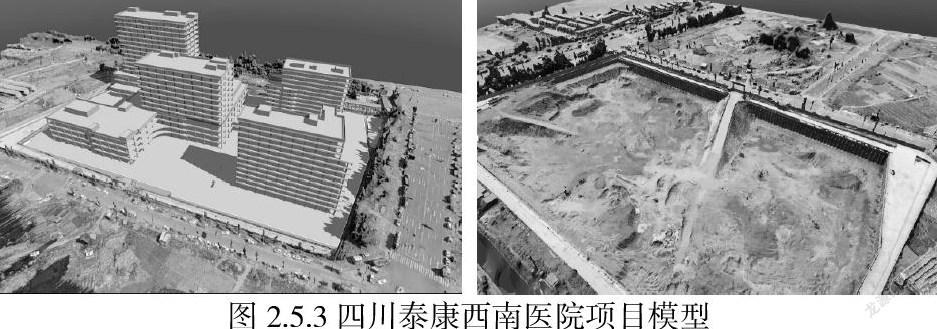
2.2四川泰康西南醫(yī)院項目概況
四川泰康西南醫(yī)院項目位于四川省成都市天府新區(qū)華陽街道二江寺村五、六、十一組,總建筑面積251241.00㎡,建筑由地下二層、1#樓組成,其中1#樓包含1棟17層北住院樓、1棟13層南住院樓、1棟4層醫(yī)技樓、1棟4層門診樓組成,結(jié)構(gòu)形式為鋼筋混凝土框架剪力墻、鋼筋混凝土框架結(jié)構(gòu)。
2.3無人機傾斜攝影技術(shù)應用要點
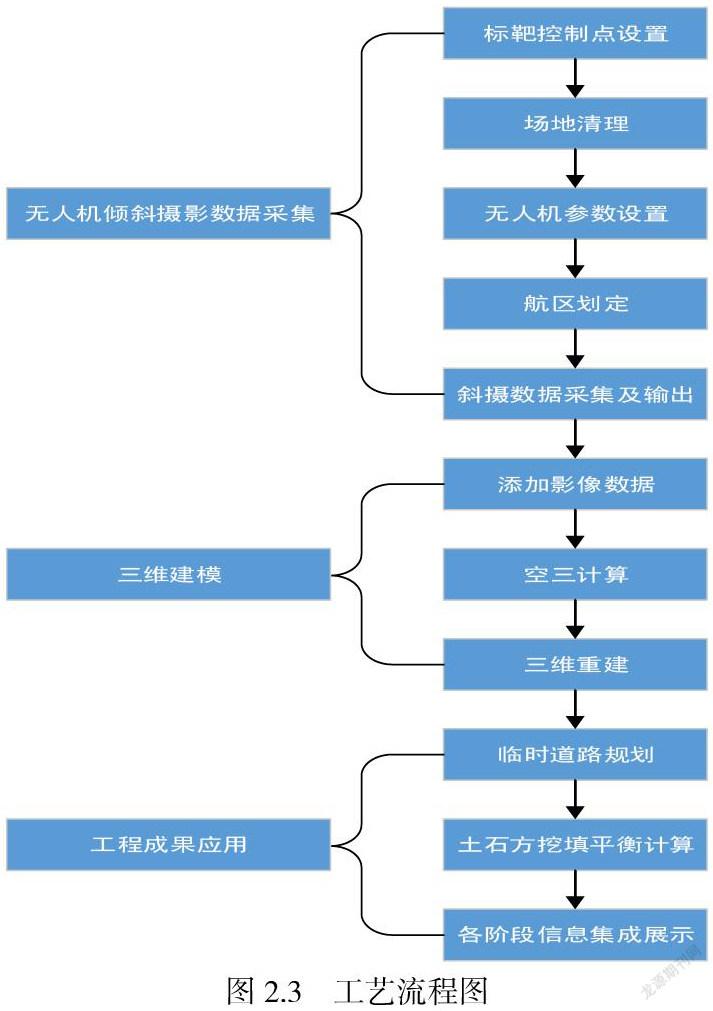
利用無人機傾斜攝影技術(shù)獲取項目高分辨的多視角多方位影響數(shù)據(jù),再運用ContextCapture強大的基于圖像密集匹配技術(shù)的快速三維場景運算功能,進行傾斜攝影空中三角測量解算,再進行地面景物的逼真實景真三維重構(gòu),最終達到實現(xiàn)全要素的三維項目模型及場景生產(chǎn)的目的。
其工藝流程如下:
2.4無人機傾斜攝影數(shù)據(jù)采集
本實例中航測數(shù)據(jù)根據(jù)項目實際進度分階段進行采集,無人機航攝作業(yè)全程采用軟件輔助自動拍攝。對于復雜部位,采用手動操作無人機的方法補充拍攝數(shù)據(jù)。
2.4.1標靶控制點設(shè)置
傾斜攝數(shù)據(jù)采集前的準備工作中,控制點的布置作為基準數(shù)據(jù)是不可或缺的。場地占地面積平均每10000m2布置2個控制點,鄰點間距不大于80m,且總數(shù)不少于5個控制點,構(gòu)成閉合控制網(wǎng),同時利用全站儀測量并記錄每一個控制點的坐標及高程,控制點精度要求為閉合差±4mm√N(N為測站數(shù))。為了便于無人機數(shù)據(jù)采集的識別,可在數(shù)據(jù)采集前,制作1m×1m的紙質(zhì)標靶固定于控制點之上。
2.4.2場地清理
為了避免場地內(nèi)雜物對數(shù)據(jù)精度造成影響,數(shù)據(jù)采集前,應對場內(nèi)堆放的材料及機具進行調(diào)運或清理。
2.4.3無人機參數(shù)設(shè)置
影響無人機獲取影像精度的主要因素有航線、相對航高、重疊度等,實施航攝前需充分考慮以上因素,提前設(shè)置參數(shù)以保證影像質(zhì)量。
2.4.4航區(qū)劃定
航區(qū)劃定除了考慮覆蓋面積外,還需要考慮航線的數(shù)量與方向。航線應呈帶狀按次序逐步覆蓋全部場地,實現(xiàn)對地形邏輯有序的全覆蓋航攝。同時,航線的數(shù)量與航攝數(shù)據(jù)的重疊率呈正相關(guān),航線的數(shù)量越多,航攝數(shù)據(jù)的旁向重疊率越大,建得的三維模型精度越高。
2.4.5斜攝數(shù)據(jù)采集及輸出
具有多個傳感器和攝像頭的無人機,可從不同位置不同角度獲取同一地物多方向(東西南北和頂部)上的影像,影像記錄的同時也記錄了無人機視點的POS(經(jīng)緯度)信息。航攝過程中注意應有一定數(shù)量的圖像攝有標靶控制點,以便修正生成的三維模型的坐標信息。
2.5三維建模
2.5.1添加影像數(shù)據(jù)
使用ContextCapture軟件添加無人機采集的影像數(shù)據(jù),并用軟件檢查影像數(shù)據(jù)的完整性,調(diào)整影像數(shù)據(jù)的空間排布。
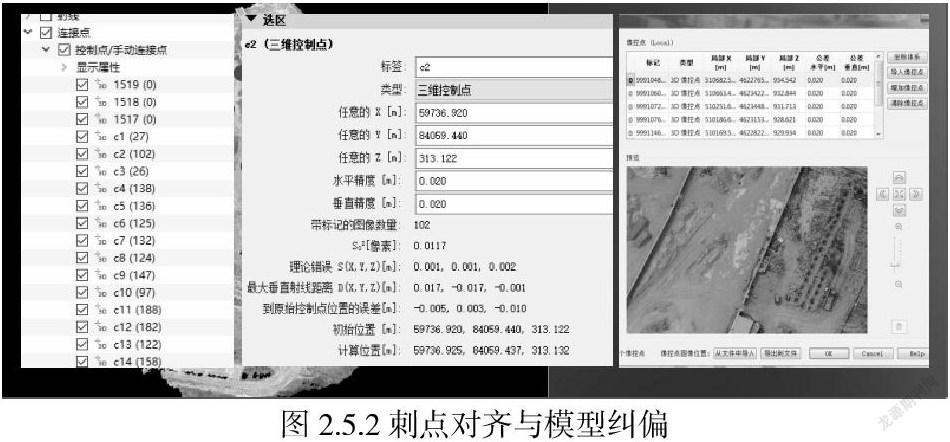
2.5.2空間三維計算
利用軟件導入象控點信息,對點云模型刺點對齊,調(diào)整模型整體坐標的位置和傾角,進行空間三維計算。
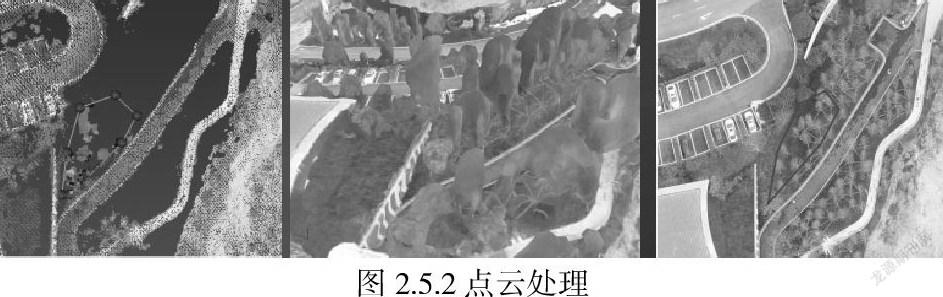
上一步完成后,對照照片,將點云數(shù)據(jù)中明顯的地表影響因素的信息點剔除。
2.5.3三維重建
經(jīng)過空間三維計算和點云信息處理,生成高程信息模型,進行表皮紋理數(shù)據(jù)貼附,合成最終的三維實景場地模型。
三、無人機傾斜攝影技術(shù)的特點總結(jié)
3.1減少測量工作
相比傳統(tǒng)測繪建模工作,利用無人機的傾斜攝影技術(shù)不受項目地形限制,減少了測量人員野外作業(yè)的工作量,在一定程度上保證了人員的安全。
3.2數(shù)據(jù)采集快捷準確
由于使用無人機進行數(shù)據(jù)采集,在制定飛行路線計劃后更加簡便快捷,節(jié)約了大量的人力物力,并且結(jié)合GIS技術(shù),模型中任意一點的高程和坐標信息均可讀取,數(shù)據(jù)具有精確性。
3.3實現(xiàn)數(shù)據(jù)的三維可視化
利用無人機傾斜攝影技術(shù)采集數(shù)據(jù)后,再使用ContextCapture軟件進行數(shù)據(jù)處理,數(shù)據(jù)可根據(jù)實際需要進行編輯調(diào)整,實現(xiàn)了數(shù)據(jù)的三維可視化,做到了“所見即所得”。
3.4提高建模工作效率
利用傾斜攝影測量和建模的關(guān)鍵支撐點——分層顯示技術(shù)和紋理映射技術(shù),極大地提升了三維建模的效率,同時也降低建模的生產(chǎn)成本。
3.5質(zhì)量控制要點
航測數(shù)據(jù)畫幅的光照部位以及陰影部位在不同畫幅中不可偏離過大,避免模型生成時的識別錯誤。模型的精準度依賴于航測數(shù)據(jù)的畫幅數(shù)量以及航測角度、重疊率等,模型精度應控制在點數(shù)據(jù)±5cm 的偏差內(nèi)。
四、結(jié)語
目前無人機在建設(shè)項目中已得到了廣泛應用,結(jié)合GIS技術(shù)及BIM軟件可將無人機應用進行多維度的應用拓展,為項目施工及管理帶來實質(zhì)性的效率提升,提高無人機的應用頻率和效果。數(shù)據(jù)采集過程中,無人機采集數(shù)據(jù)不限于地形地貌,減少了測量人員野外作業(yè)工作量,降低了測量工作的危險性,同時,無人機三維逆建模技術(shù)可視化程度高,減少了過程中建立三維模型的時間,并能應用于土方量計算等工作中,提高了施工人員工作效率,取得一定的經(jīng)濟效益。助力智慧工地的建設(shè),滿足智能建造需求。
參考文獻:
[1]《無人機機載電子測量設(shè)備通用規(guī)范》(GJB 8265-2014)
[2]《城市三維建模技術(shù)規(guī)范》(CJJ/T157-2010)
[3]《低空數(shù)字航空攝影規(guī)范》(CH/Z 3005-2010)
[4]《工程測量規(guī)范》(GB50026—2007)