一種基于UWB技術的定位系統設計
2021-12-17 11:18:46沈小帥
電子測試 2021年22期
沈小帥
(沈陽航空航天大學電子信息工程學院,遼寧沈陽,110136)
關鍵字:UWB;雙邊雙向飛行測距;卡爾曼濾波;泰勒定位
0 引言
現階段多數安保指揮體系基本涵蓋了集無線通信、網絡通信、無線圖傳等功能。但在大型會場內部或大型活動的封閉現場中,缺少實時的安保人員定位,不利于安保指揮。而目前高精度室內定位還少有在安保工作中應用,在技術方面,有WiFi定位技術、RFID定位技術、CSS定位技術、UWB定位技術等,其中UWB(Ultra Wide Band)定位技術結合多種測量方法,能夠滿足應用于現場管控。根據室內現場對人員位置監控的任務需求,結合UWB和LORA通信技術,在基于SDSTWR 測距方法和多基站定位算法的支持下,設計了一款安保人員室內定位系統,主要包括定位系統的功能需求分析,系統的總體設計、測距基站與定位標簽硬件電路的設計及實現、上位機檢測軟件和系統測試。
1 系統需求
根據定位場景的不同,需求也會有所差異,本系統定位應用場景為某室內會議現場,以安保實際情況為依據,本系統應具備如下功能:(1)具備高精度人員定位功能,能夠對安保人員進行定位跟蹤;(2)定位標簽體積適中,方便執勤安保佩戴;(3)在數據傳輸方面,為了避免有線通信的不便,采用LORA無線通信系統進行數據傳輸;(4)設計一款上位機軟件,將安保人員的位置直觀的顯示在可視化界面上。
2 系統的總體設計
在大型室內會議現場中要實現安保人員的精準定位,對于數據的準確性、可靠性傳輸具有嚴格的要求,因此本文選擇LORA無線通信技術將標簽的位置數據快速可靠地上傳到上位機,上位機能夠及時完成移動目標位置的解析。考慮到大型現場由多各區域組成的特點,設計的人員定位系統的系統架構如圖1所示:該系統主要分為定位和顯示兩部分,顯示部分主要包括LORA服務器、顯示器等終端等組成。定位部分主要由移動標簽和定位基站等組成。

圖1 系統設計圖
3 系統硬件設計
硬件總體由處理器模塊、UWB模塊、顯示模塊、通信模塊、電源等模塊組成。由于測距方式采用雙邊雙向測距方式,所以標簽與基站的硬件設計基本相同,標簽的設計比基站多一個無線LoRa通信模塊,用于數據交換。
4 下位機軟件設計
移動標簽總體流程圖所示,移動標簽首先進行系統初始化,如果初始化失敗則提示錯誤代碼,只有初始化成功后踢動標簽才可以繼續執行,控制單元通過控制UWB測距模塊[1]實現基本的距離測量,然后結合該測量值和本文設計的濾波算法對該測量值進行濾波處理,當移動標簽有多組對應不同基站的距離觀測值并滿足Taylor定位方程時,則進行位置信息的解算,最終得出執勤人員的位置信息并通過LoRa無線通信模塊發送到LoRa網關[2]。
5 上位機監測軟件設計
上位機監測軟件采用QT Creactor平臺開發,該平臺使用QT框架進行GUI的設計,通過該平臺下的UI界面設計工具,完成了軟件界面的布局與設計[3]。使用C++語言完成執勤人員的位置顯示,用戶登錄以及基本配置等功能。本上位機監測軟件主要由基本配置、用戶登錄和地圖顯示三部分組成。基本配置主要是用于配置通信相關的基本選項,用戶登錄界面主要用來識別用戶權限,如果使用的用戶沒有授予權限則啟動不了定位功能。由于會議現場分布在三個樓層,因此地圖顯示部分由三個樓層的平面圖組成,結合三維坐標信息將用戶的位置直觀的顯示在相應的地圖上。
當上位機監測通過信號與槽的機制等待接受執勤人員的位置信息,當上位機監測軟件接收到新的數據之后首先進行數據解析,然后將該數據更新到數據列控件中,然后再結合地圖顯示控件將該數據信息顯示在地圖上。為了方便地圖顯示本設計在QCustomPlot 類的基礎上構建了一個新的地圖顯示類該類的構造函數主要用來配置地圖的基本配置信息,如地圖的加載以及顯示屬性等,在該類中包含了一個QCustomPlot對象,通過posShow函數將位置數據傳遞到QCustomPlot 對象中,最終使其顯示在地圖上。
6 系統測試
首先對移動標簽的距離測量性能進行測試,為了進一步的提高數據的有效性,選取了大量測試點進行測量,每個測試點都進行了多次測量,部分測試數據如表1所示。
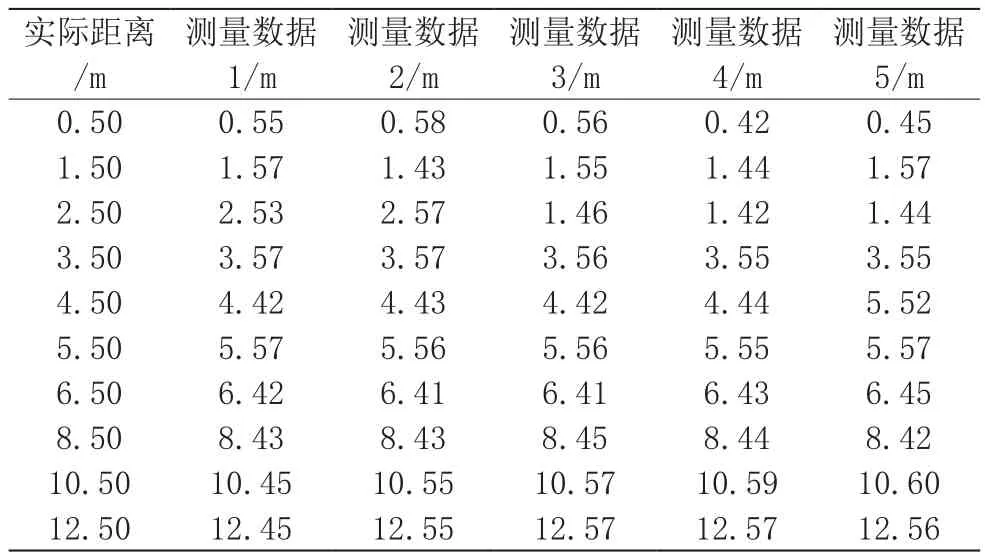
表1 距離測試數據
7 定位測試
為了測試本文設計的定位系統的定位性能,在會議現場進行了測試,由于保密等因素展示部分測試環境。
本次測試分別對三個樓層的會議室進行了測試,部分測試數據如表2。

圖2 部分測試環境圖
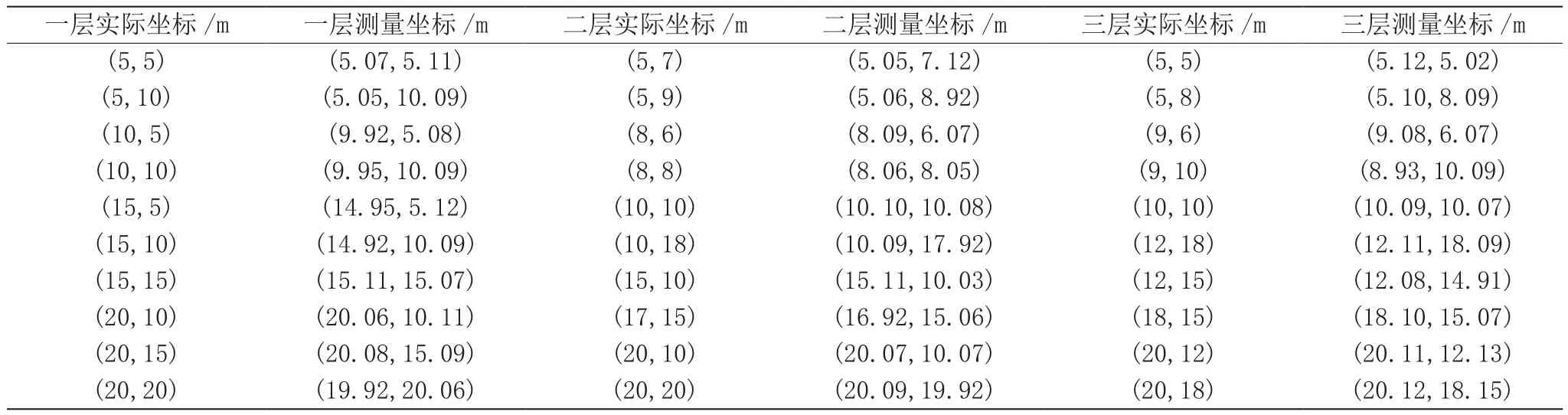
表2 距離測試數據
最后對該系統進行了聯合測試,上位機軟件界面效果如圖3所示。
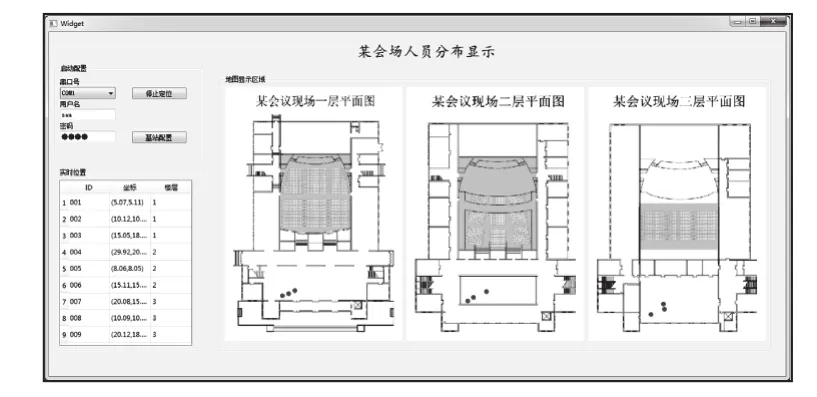
圖3 部分測試環境圖
由上圖可以看出該軟件可以將執勤人員的位置信息直觀的顯示出來,能夠較好對執勤人員的位置進行監控。
8 結論
本文針對室內安保、科學布控等問題,基于UWB定位技術設計了一款定位系統,系統包括硬件及軟件兩部分,結合某省會議現場,進行了實地測試,測試數據基本符合實際應用要求,內部算法由于篇幅有限不做重點介紹,運用了雙邊雙向測距方法,并結合卡爾曼濾波和泰勒算法。測試結果符合預期誤差,證實了系統設計的合理性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
舒適廣告(2008年9期)2008-09-22 10:02:48
