輪轂電機驅動電動汽車的電制動特性研究
2021-12-14 08:05:21汪新偉周自寶
內燃機與配件 2021年1期
汪新偉 周自寶

摘要:輪轂電機驅動電動汽車技術的關鍵點在于輪轂電機設計與驅動電動汽車的懸架設計,本文主要從輪轂電機驅動電動汽車的液壓制動系統與輪轂電機電制動瞬態、穩態特性方面切入分析了其電制動特性內容,同時驗證輪轂電機驅動電動汽車的電制動控制技術性與可行性。
Abstract: The key points of the technology of electric vehicle driven by wheel motor lie in the design of wheel motor and suspension of electric vehicle driven by wheel hub motor. this paper mainly from the wheel motor drive electric vehicle hydraulic braking system and wheel motor electric braking transient, steady-state characteristics of cut in analysis of its electric braking characteristics, at the same time verify the wheel motor drive electric vehicle electric brake control technology and feasibility.
關鍵詞:輪轂電機驅動;電動汽車;電制動特性;液壓制動系統;懸架系統
Key words: wheel motor drive;electric vehicle;electric braking characteristics;hydraulic braking system;suspension system
中圖分類號:TD421.5? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)01-0029-02
0? 引言
目前采用輪轂電機對電動汽車進行直接驅動是非常高效的,它能夠直接取代傳統動力總成,實現對電動汽車底盤結構的有效簡化,同時減少機械傳統機構傳統過程,有效提高傳統生產效率。當然,輪轂電機直接驅動電動汽車制動系統設計在國內始終是難攻克專業問題,它采用驅動電機配備江蘇裝置可實現對車輛的有效驅動,配合電動真空泵與真空助力器為輪轂電機提供較高真空度。不過,如此設計可能會為電動汽車原有機械制動器布局帶來一定麻煩,需要加以注意。因此針對輪轂電機驅動電動汽車電動制動性的結構內容必須加以優化,設置專門的液壓制動系統,良性影響車輪的整體定位參數,合理維持電動汽車的操縱穩定性,同時也提高底盤控制系統的整體集成度,這對電動汽車的制動性能升級也是頗有好處的[1]。
1? 輪轂電機驅動電動汽車的電制動特性討論分析
研究輪轂電機驅動電動汽車的電制動新內容就必須首先討論它的液壓制動系統模型構建,它其中包括了真空助力器模型、制動鉗模型以及制動主缸模型。這里簡單分析了制動主缸模型與制動鉗模型。
1.1 制動主缸模型分析
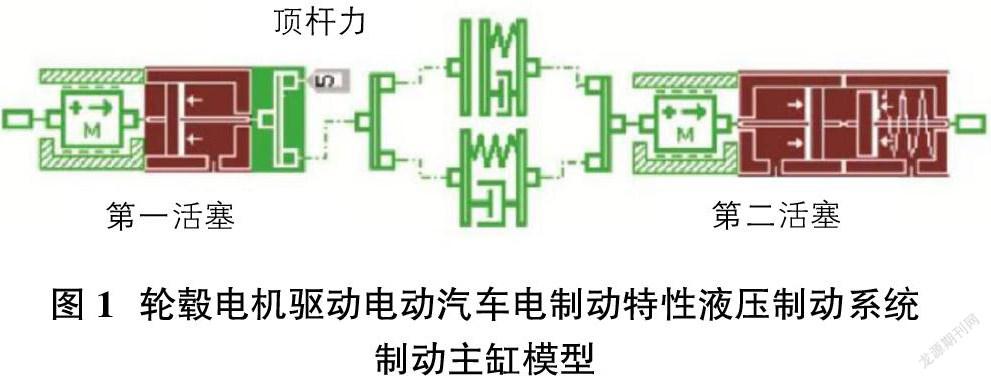
制動主缸模型是輪轂電機驅動電動汽車電制動特性的關鍵,該模型中在制動過程中會存在主缸壓力,其壓力方程是應該如下[2]:
在上述壓力方程中,Pmc代表了制動主缸壓力,Amc代表了制動主缸的橫截面面積,Fmc、Fcs、Fsf分別代表了制動主缸中的第一活塞推力、主缸回位彈簧反作用力以及主缸活塞與主缸內壁的滑動摩擦力。結合上述壓力方程可構建基于液壓制動系統的完整主缸仿真模型,如圖1[3]。
1.2 制動鉗模型分析
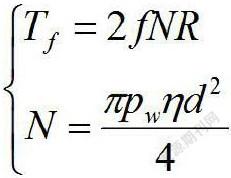
在針對液壓制動系統中的盤式制動器進行分析過程中要運用到制動鉗系統,結合這一系統主要分析了液壓制動系統中的制動管路壓力以及鉗夾緊力,分析二者之間關系轉化,列出如下方程組:
在上述方程組中,Tf作為盤式制動器的制動轉矩部分,f作為制動塊與制動盤的具體摩擦系數,N作為制動塊對制動盤的壓緊力,R為半徑。結合這一數學模型進行分析,可在AMESim軟件中建立一套液壓制動系統,優化調整仿真模型,追求實現超級組件功能,配合X形布置制動管理模型形成新連接,獲得液壓制動系統模型。
1.3 輪轂電機電制動特性功瞬態與穩態響應特性仿真分析
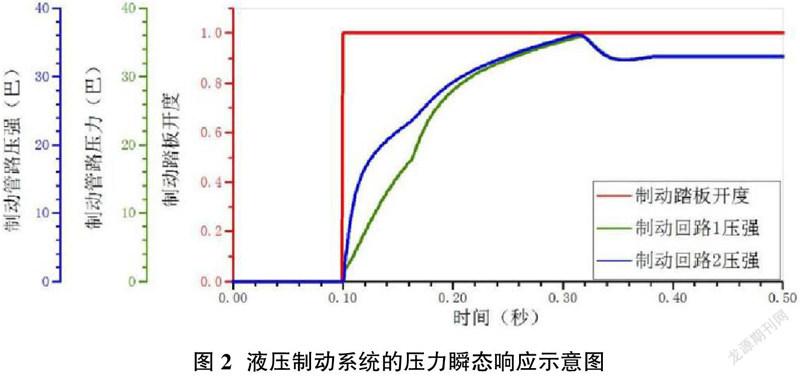
分析完上述數學模型后,可為輪轂電機驅動電動汽車電制動特性內容建立瞬態與穩態響應特性仿真分析體系,如圖2為液壓制動系統的壓力的瞬態響應示意圖。
如圖2,從仿真結果中可以看到,液壓制動系統是從0.1s開始展開仿真試驗的,其輸入信號從0級直接躍升到100%,形成制動踏板開度信號。這一制動輪缸內的壓力是呈現出非線性增長態勢的,大約達到0.32s時為最大值,但最大值時略有波動,到0.39s左右時趨于穩定。考慮到液壓制動系統的瞬態響應時間一般在0.28s以內,所以其液體是可實現有效壓縮的,同時也必須分析其制動管路的損失因素,對制動輪缸內的壓力波動問題進行分析,確保行車制動穩定性發揮到位。總體來說,應該在輪轂電機電制動瞬態響應過程中分析其制動優勢,了解響應時間大約能夠達到液壓制動系統的1/55左右,此時輸出制動轉矩優化調整非線性波動內容,有效提高電動汽車的整體制動穩定性。
再對穩態響應特性仿真試驗結果進行分析。此時需要分析輪轂電機的制動方案實施可行性,考慮制動工況背景下制動系統的性能發揮優勢。為此需要了解日常汽車行駛工況,結合輪轂電機電制動穩態響應作用分析其穩態特性,考察輪轂電機制動穩態響應特性。這里要運用到計算機仿真方法,確保液壓制動系統與輪轂電機電制動穩態響應特性對比分析到位。從仿真結果中可以了解到,如果電動汽車處于非緊急制動工況狀態下,其液壓制動系統中的制動力矩會呈現出平穩增長態勢。例如針對初速度為40km/h的常規制動的電動汽車,利用液壓制動系統可保證其響應時間達到0.26s左右,達到最大制動優勢。其液壓制動可最多節省大約2.8m制動距離,而針對更高初速度的制動電動汽車,其輪轂電機電制動優勢更是不言而喻的。在常規制動工況下,需要結合電機制動發揮輪轂電機快速響應優勢,進而實現對電動汽車制動性能的有效提升。
2? 輪轂電機驅動電動汽車的電制動特性整車模型分析
結合輪轂電機驅動電動汽車電制動特性對其整車模型進行全面分析。這里可運用到AMESim15自由度底盤模型,并利用它再建立一套懸架模型,新的懸架模型中包含了減震器、彈簧、防傾桿模型等等設備,屬于典型的液壓制動系統模型,其輪轂電機表現穩定,可構建一套完整的輪轂電機制動整車聯合仿真模型。
基于這一整車模型還可建立輪轂電機短時間駐車控制模型,該控制模型采用到的是電機電制動駐車控制體系中的最基本功能,它可保證當駕駛員按下駐車制動按鈕后配合電制動控制器實現對車輛狀態信息內容的實時采集,通過這一過程合理判斷正常駐車制動條件,確保電制動控制器根據實際坡度傳感器優化信號估算路徑,對駐車制動力進行詳細分析,結合CAN總線與4個輪轂電機發送目標,建立采集車輛狀態信息系統,圍繞程序駐車制動控制循環,再利用MATLAB/Stateflow設計常規駐車功能激活功能,對控制模型進行解除。
可將輸入信號作為點火開關并發射信號,例如車門鎖信號、安全帶卡扣鎖信號、駐車按鈕信號、路面附著估算值信號等等,結合車速信號建立加速踏板,優化制動踏板開度信號,并設計BEEP提示音信號。在針對仿真結果進行分析過程中,需要結合駕駛經驗缺乏與操作疏忽對車輛坡度估計值進行調整,優化其整車模型的制動功能,配合駐車制動力與施加駐車制動力分析駕駛安全狀況,通過輪轂電機駐車控制優化車輛減速過程,確保電制動控制器對車速信號、制動踏板信號與加速踏板信號進行合理化判斷,確保電制動控制器對車速實現有效控制。
建立制動踏板信號與加速踏板信號判斷機制,確保車速低于0.5m/s左右,但保證制動踏板開度不為0。在該過程中,還需要繼續利用電制動控制器監測車輛狀態,以滿足駐車條件,確保常規駐車功能仿真結果分析到位。在該過程中,還需要對輪轂電機輸出轉矩進行分析,確保駕駛員有效規避電動機車“溜坡”問題,提高車輛行駛安全性。在該過程中,通過電機駐車制動控制,避免電機堵轉,在短時間內實現對駐車的精確制動控制,配合電子機械以及電磁式制動器問題,進而實現對輪轂電機輸出轉矩的精確控制,通過離線仿真方式對相關內容進行驗證。在整車模型設計過程中,需要做到對駐車制動力的準確施加,配合駕駛難度較高工況對坡路起步。整車模型是能夠輔助駕駛員在相對擁堵的交通環境中自動駐車的,它的自動駐車功能會實現短時間內控制制動功能,針對輪轂電機電制動坡路起步、緊急制動以及自動駐車來實現對電動機車的有效控制,為輪轂電機智能駐車控制實現有效優化。
3? 總結
綜上所述,本文中可參考基于AMESim建立磐石制動器液壓制動系統瞬態與穩態模型,進而實現對制動鉗模型、制動主缸模型的數學模型有效建立,追求實現液壓制動系統與輪轂電機電制動對比仿真有效分析,確保其瞬態響應特性與常規穩態響應特性仿真到位。而在針對輪轂電機驅動電動汽車電制動特性的過程中,也希望大幅度提高制動系統的整體響應速度,確保制動力矩安全平穩可靠,全面提高電動汽車制動性能,提升輪轂電機電制動方案的整體可行性。與此同時,也為日后針對輪轂電機電制動方案的可行性研究打下良好基礎,深層次分析其輪轂電機驅動的電動汽車防抱死制動內容,實現更進一步的理論技術研究優化。
參考文獻:
[1]劉剛,徐文博,靳立強.輪轂電機驅動電動汽車液壓執行單元的壓力估計與控制方法研究[J].汽車工程,2019,41(10):1138-1144.
[2]董昊軒,郭金剛,閆寬寬.輪轂電機四輪獨立驅動電動汽車再生制動控制策略[J].機械科學與技術,2017,36(11):1778-1784.
[3]張利芬,韓小偉.輪轂驅動電動汽車開關磁阻電機制動特性分析[J].內燃機與配件,2018(011):47-49.
